Способ управления улавливанием паров в распределительной топливной колонке - RU2250195C2
Код документа: RU2250195C2
Чертежи








Описание
Настоящее изобретение относится к распределительным (заправочным) топливным колонкам, в частности к колонкам, которые снабжены системой для улавливания паров, выделяющихся во время заправки транспортных средств.
В устройствах для распределения топлива и, в частности, в уличных распределительных устройствах для заправки транспортных средств, стандарты по безопасности и защите окружающей среды требуют, чтобы газовая фаза, которая состоит из смеси воздуха и паров топлива и выделяется из баков транспортных средств, когда они заправляются, не рассеивалась в окружающей среде.
Это выделение газовой фазы по существу вызвано эффектом вытеснения паров жидкостью, заполняющей бак, что уменьшает объем над уровнем жидкости и вытесняет эквивалентный объем газовой фазы.
Согласно существующему уровню техники, эта воздушно-паровая фаза всасывается путем снабжения топливно-распределительных пистолетов как топливно-распределительными, так и всасывающими соплами, которые соединены с волюметрическими насосами. Распределительный пистолет соединен с заправочной колонкой трубкой для подачи жидкого топлива, которое подается насосным блоком с переменной скоростью подачи, а также всасывающей трубкой, которая присоединена к волюметрическому насосу для откачивания паров, приводимому в действие с скоростью, которая в каждый момент времени непосредственно связана со скоростью подачи топлива.
Были предложены различные системы для улавливания паров, т.е. воздушно-паровой фазы, которая выделяется из баков транспортных средств, когда они заправляются, см., например, патент США №5038838, европейский патент ЕР-В-461770; а также WO 98/00641, WO 96/06038, DE 4200803.
Для того чтобы прояснить технические проблемы, которые связаны с улавливанием паров в распределительных колонках, рассмотрим схему, показанную на фиг.1 и относящуюся к колонке, которая снабжена единственным распределительным пистолетом.
Колонка 10 снабжена поддерживающей структурой 11 в виде коробки, которая содержит и поддерживает ее блоки.
Топливо содержится в подземном резервуаре, не показанном на чертеже, из которого оно доставляется посредством всасывающей линии, которая состоит из впускного устройства 12, насосного блока 13, который присоединен к распределительному пистолету 18, и измерителя 14, который измеряет количество подаваемого топлива, перед тем как передать его через трубку 15 в сепаратор 16, от которого отходит гибкая трубка 17 распределительного пистолета 18.
К измерителю 14 присоединен импульсный генератор 20, который выдает электрический импульс на каждую единицу отпущенного топлива, например, на каждый сантилитр; этот импульсный сигнал имеет частоту, которая пропорциональна расходу топлива, и подается на индикаторную головку 21, которая на основе числа импульсов рассчитывает и показывает количество отпущенного топлива и соответствующую стоимость заправки.
Этот же сигнал передается в электронный блок 22 управления, который управляет системой улавливания паров.
Трубка 17 распределительного пистолета 18 содержит как трубку 23 для подачи топлива, которая является продолжением подающей трубки 15, идущим до распределительного наконечника, так и возвратную трубку 24, которая присоединена к всасывающему соплу, расположенному вблизи распределительного сопла.
Это сопло всасывает пары, которые вытесняются из бака, когда он наполняется, а возвратная трубка 24 соединяется в сепараторе 16 с трубкой 25, которая соединена с волюметрическим насосом 26 для всасывания паров, приводимым в действие двигателем 27, который под управлением электронного блока 22 управления поддерживает число оборотов, в каждый момент времени связанное с частотой импульсного сигнала генератора 20 так, чтобы согласовать число оборотов насоса 26 и, следовательно, объемный расход патока всасываемых ларов со скоростью подачи топлива.
Пары, всасываемые волюметрическим насосом 26, через трубку 28 попадают в подземный резервуар, из которого подается топливо; вообще отношение объемов отпущенного топлива и откачанной газообразной фазы устанавливается и поддерживается в интервале значений, близких к единице; эта установка может изменяться в зависимости от типа топлива и окружающих условий.
Топливо обычно подается с переменной скоростью, которая регулируется оператором посредством нажатия на рычаг 30 управления пистолета, в то время как скорость всасывания паров должна в каждый момент соответствовать скорости подачи топлива.
Практически последовательность импульсов точно представляет ситуацию с подачей жидкости, момент за моментом, при этом число импульсов соответствует количеству отпущенного топлива, а частота импульсов соответствует мгновенному значению расхода; однако управление волюметрическим откачивающим насосом, которое происходит путем изменения его мгновенной скорости, т.е. числа его оборотов в минуту, на основе мгновенной частоты импульсов измерителя не является достаточно точным для получения в конечном итоге постоянного отношения между объемными расходами подаваемой жидкости и откачиваемых паров.
Самыми распространенными типами волюметрических насосов, используемыми для улавливания паров в топливных распределительных устройствах, являются лопастные насосы, шиберные насосы и альтернативные типы насосов, а они имеют характеристическую кривую зависимости производительность/скорость, не являющуюся линейной, и поэтому нет возможности получить постоянное отношение между объемными расходами поданной жидкости и откачанных паров, если работа системы основана на частоте импульсов измерителя/генератора, когда при изменении скорости подачи топлива число оборотов волюметрического насоса в минуту регулируется линейно.
Фиг.2А и 2В показывают типичные варианты хода характеристических кривых (производительность/скорость) для этих типов волюметрических насосов, работающих в системе улавливания паров. В частности, фиг.2А показывает ход характеристической кривой лопастного или шиберного насоса, в то время как фиг.2В иллюстрирует ход характеристической кривой альтернативного насоса.
В сущности, эти характеристические кривые показывают поведение насосной системы в условиях постоянных нагрузочных потерь ΔP1 и ΔР2 (где ΔP2>ΔP1). Техническая проблема еще более осложняется в недавно разработанных распределительных системах, в которых каждая колонка снабжена множеством распределительных пистолетов, каждый из которых присоединен к отдельному подземному топливному резервуару, например с высокооктановым этилированным бензином, неатилированным бензином разных марок, дизельным топливом и т.д.
В этом случае из каждой группы пистолетов 18 на одной и той же стороне колонки 10 в некоторый момент времени может работать только один распределительный пистолет, чтобы заправлять транспортное средство, стоящее перед колонкой, и каждая группа пистолетов 18 на каждой стороне снабжена волюметрическим всасывающим насосом 26. В случае использования множества распределительных пистолетов 18 транспортировочные трубки для паров, откачиваемых в соответствующие подземнью резервуары, после волюметрического насоса 26 (по направлению потока) разделяются на различные трубки 28, и на каждой из них устанавливается переключательная система, которая содержит ряд невозвратных клапанов, один из которых показан схематично на фиг.1 и в целом обозначен как 31. Существует также проблема разбалансов в нагрузочных потерях, которые имеют место в ветвях системы как результат различных калибровок клапанов, различных длин разных ветвей и т.д., так что каждая ветвь для доставки паров в резервуар работает не с одинаковыми нагрузочными потерями, а в соответствии с различными характеристическими кривыми производительность/скорость, как показано на фиг.2А и 2В. Таким образом, в зависимости от конкретного случая, волюметрический насос 26 работает с парами различной плотности, зависящей от типа топлива, при различных температурах и с различными значениями давления ниже насоса по направлению потока.
Из предшествующей информации очевидно, что работа при линейной связи между частотой импульсов генератора 20 и скоростью вращения двигателя 27 насоса 26 не гарантирует постоянного отношения между объемными расходами подаваемой жидкой фазы и всасываемой газообразной фазы, а напротив, приводит к существенным отклонениям от такого постоянного отношения.
Цель настоящего изобретения состоит в том, чтобы предложить способ управления улавливанием паров топлива в распределительных топливных колонках, который принимает во внимание фактические рабочие условия и делает возможным выполнение требования установления и поддержания заранее заданного отношения между объемными расходами подаваемой жидкости и откачиваемых паров как при изменении расхода подаваемой жидкости, так и при изменении состава топлива или сопутствующих условий.
Требуемый технический эффект состоит в том, чтобы придать системе улавливания паров способность получать значения отношения между заранее заданными и требуемыми расходами как во время фазы первоначальной калибровки, так и при периодическом контроле, просто посредством управления скоростью вращения электрического двигателя, который соединен с волюметрическим насосом.
Согласно настоящему изобретению, предлагается способ управления улавливанием паров в распределительной топливной колонке, способной распределять единственный продукт или множество продуктов, причем указанная колонка содержит по меньшей мере один всасывающий насос для всасывания паров, который соединен с электрическим двигателем, скорость вращения которого устанавливается на основе команд, посылаемых электронным блоком управления, получающим сигналы, посылаемые импульсным генератором, через электронную головку, при этом электронный блок управления содержит средство обработки ряда входных сигналов, которое используется для линеаризации функции от переменных, связанных с объемом пара, улавливаемого системой улавливания паров, и объемом топлива, подаваемого подающим насосным блоком, указанное средство обработки использует по меньшей мере одну компенсационную кривую, которая для множества значений, которые, в свою очередь, определяются эмпирически посредством предварительной калибровки всасывающего насоса и посредством по меньшей мере одного опорного сигнала скорости, подаваемого на вход электронного блока управления, определяет фактическое значение скорости всасывающего насоса, указанный электронный блок управления содержит микропроцессор, который снабжен по меньшей мере одной матрицей, содержащей значения, относящиеся к входной частоте, соответствующей сигналу, получаемому от импульсного генератора, и относящиеся к выходной частоте, соответствующей числу оборотов всасывающего насоса, указанная матрица помещена в энергонезависимую память микропроцессора, причем, согласно изобретению, указанная матрица содержит данные, полученные экспериментально из ряда отсчетов, взятых при помощи всасывающего насоса, а указанную компенсационную кривую получают посредством интерполяции по ряду точек, в которых испытывается система улавливания паров, причем интерполяцию выполняют посредством электронной калибровочной системы, которая передает полученные результаты электронному блоку управления.
Способ согласно изобретению делает возможным достижение линейной пропорциональности между количеством улавливаемых паров и количеством отпущенного топлива посредством электронного блока управления, который должным образом управляет изменением скорости насоса, откачивающего пары; при этом число оборотов насоса изменяется в соответствии с сигналом, полученным от импульсного генератора через электронную головку.
Характеристики и преимущества способа станут более понятными из следующего описания типичного варианта осуществления изобретения, приведенного в качестве примера, не ограничивающего изобретение, со ссылкой на сопровождающие чертежи, где
фиг.1 является схематическим представлением распределительной колонки, снабженной распределительным пистолетом с улавливанием газовой фазы;
фиг.2А, 2В являются двумя диаграммами в декартовых координатах, качественно показывающими поведение характеристических кривых производительность/скорость, относящихся соответственно к системе с лопастным или шиберным насосом и к системе с альтернативным насосом; в частности, фиг.1, 2А и 2В иллюстрируют техническую проблему, которую решает настоящее изобретение;
фиг.3 является блок-схемой устройства управления для улавливания паров согласно настоящему изобретению;
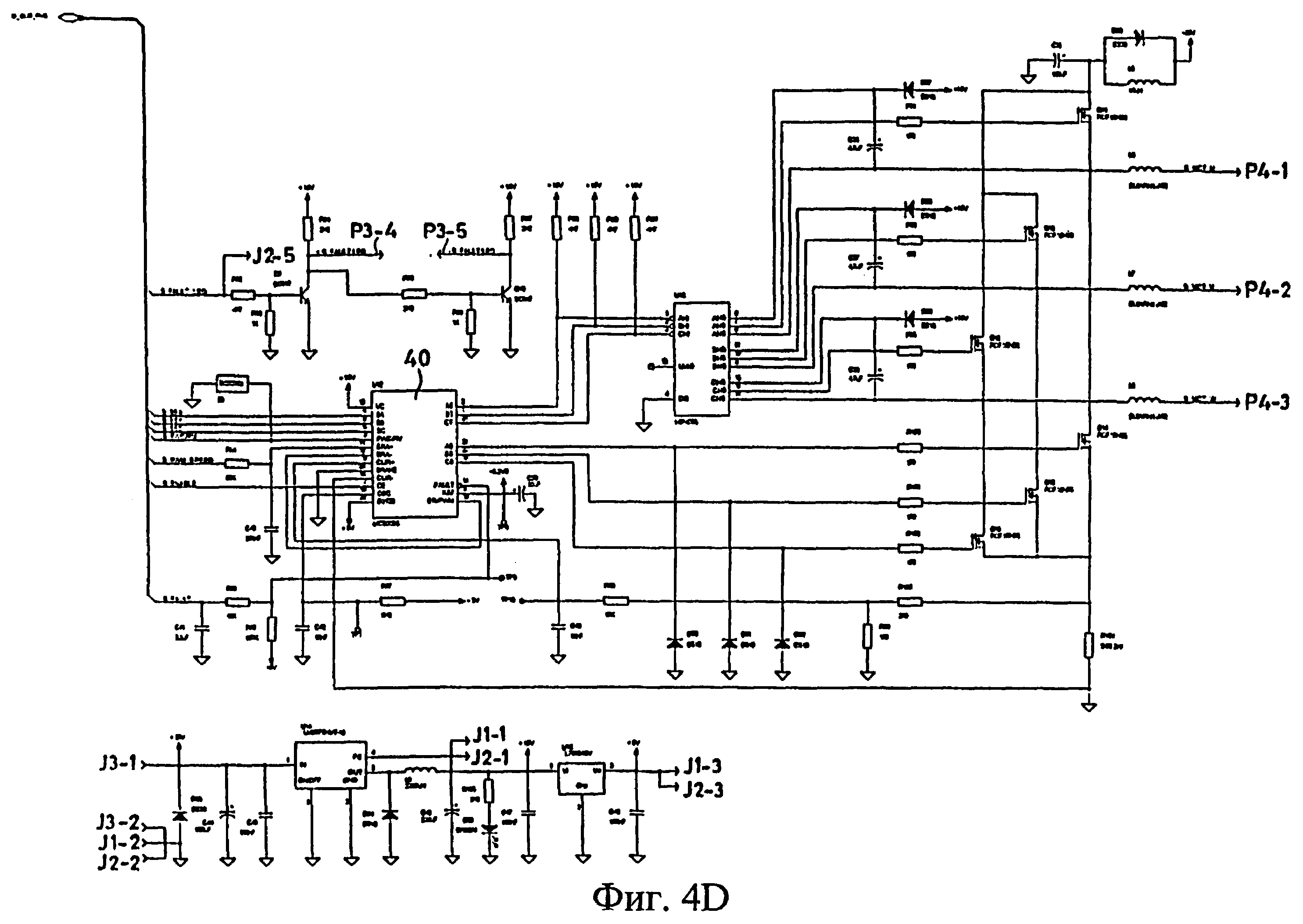
фиг.4А, 4В, 4С, 4D показывают первый вариант электрической схемы устройства управления для улавливания паров согласно настоящему изобретению;
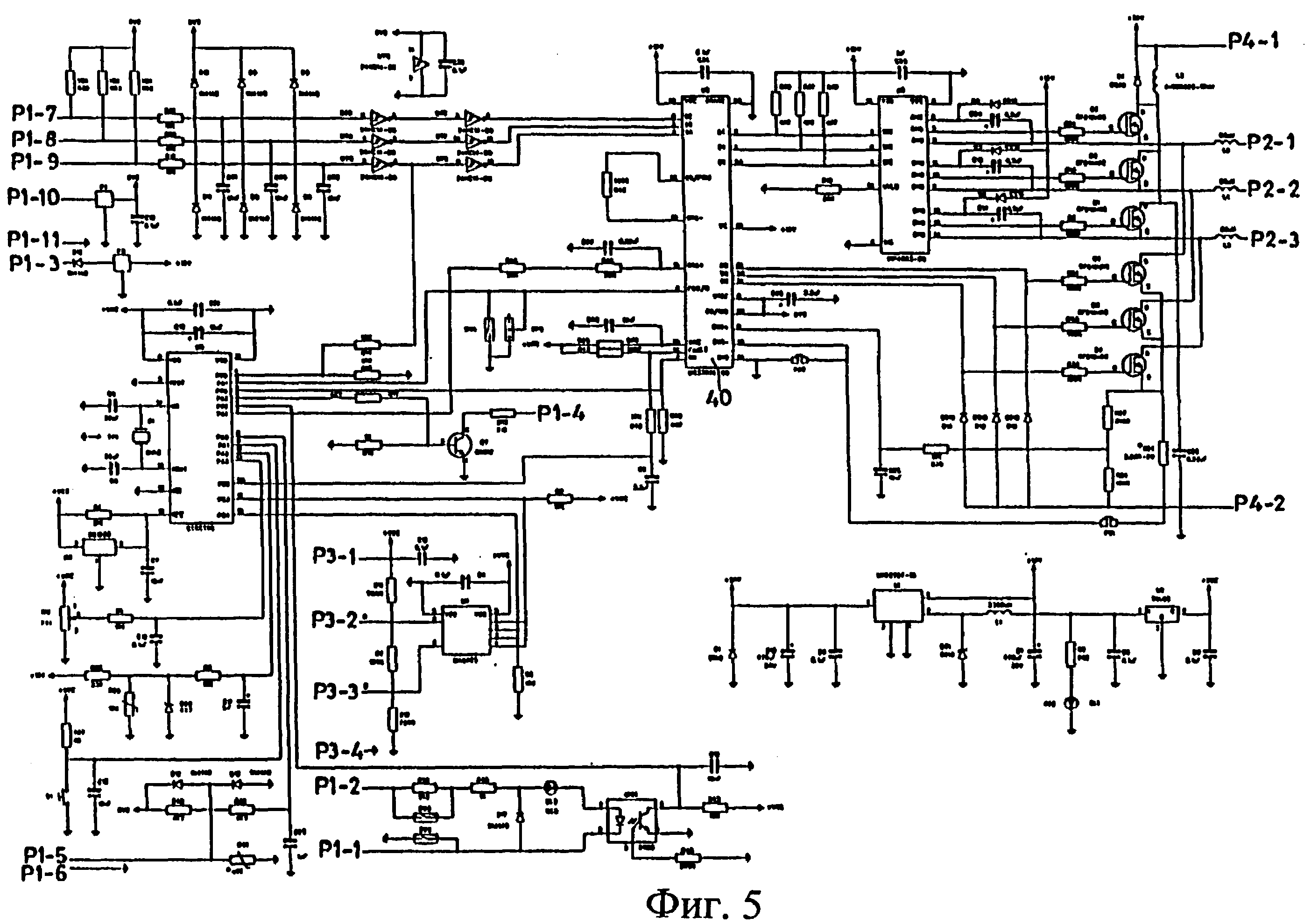
фиг.5 относится ко второму варианту электрической схемы устройства управления согласно настоящему изобретению;
фиг.6 показывает диаграмму в декартовых координатах, которая качественно иллюстрирует поведение отношения V/L (пар/жидкость), когда изменяется расход в системе улавливания паров, которая снабжена пропорциональным клапаном, при использовании насоса с фиксированным числом оборотов, которым управляют механически посредством двигателя насосного блока или независимого двигателя;
фиг.7 показывает диаграмму в декартовых координатах, которая качественно иллюстрирует поведение отношения V/L (пар/жидкость), когда изменяется расход в системе улавливания паров, при использовании насоса с переменным числом оборотов в минуту, которым управляют электронным путем;
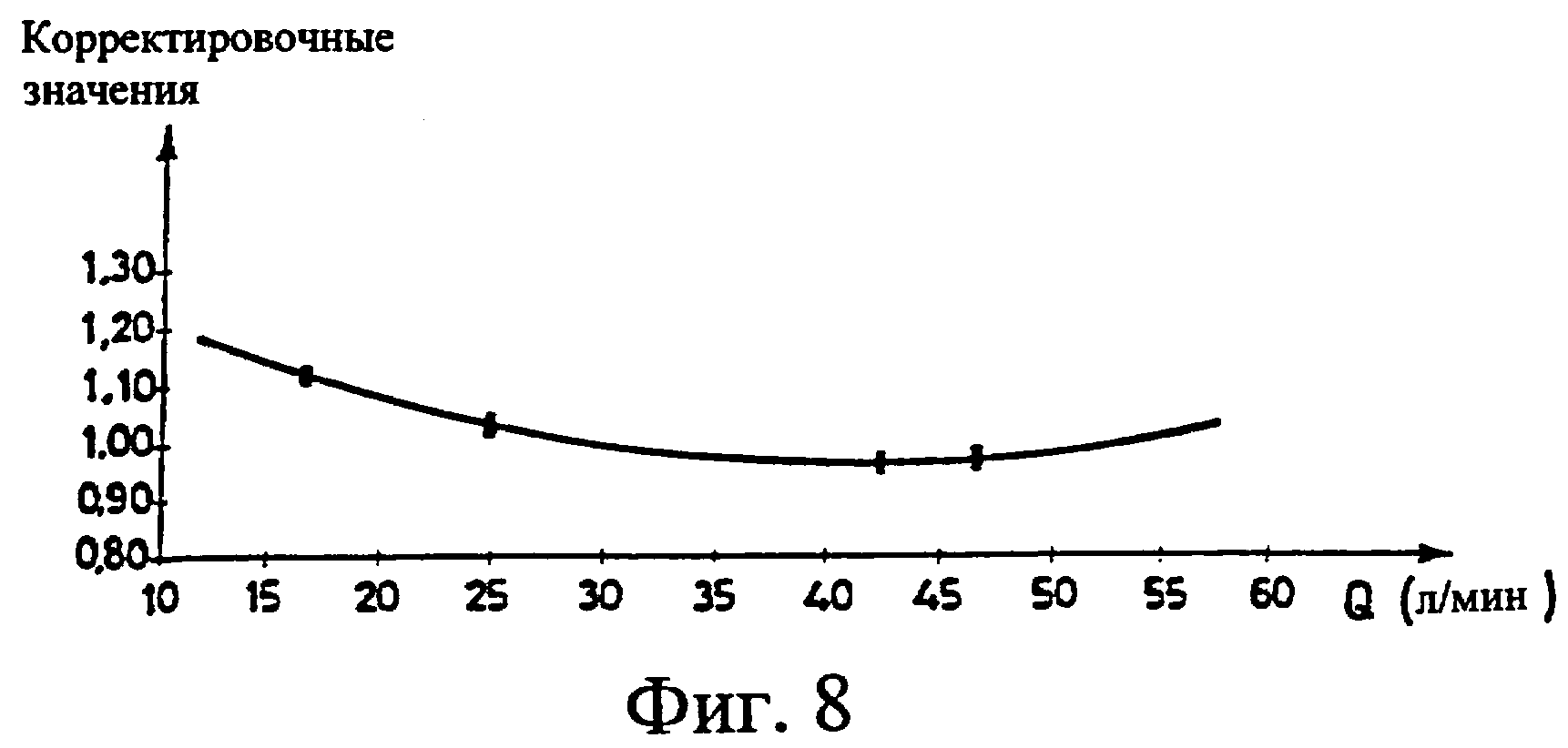
фиг.8 показывает диаграмму в декартовых координатах, которая качественно иллюстрирует поведение кривой поправочных значений, когда изменяется рабочая точка, эта кривая может быть использована в системе улавливания паров при применении устройства управления согласно изобретению.
На фиг.3 те компоненты, которые присутствуют на фиг.1, обозначены теми же цифрами, позиция 35 схематически обозначает блок, фактически относящийся к системе улавливания паров, которая позволяет улавливать бензиновые пары, которые выделяются из баков транспортных средств, пока они заправляются топливом, как уже описано ранее, а позиция 33 показывает соединительный блок для сигналов, полученных от импульсного генератора и от головки 21.
Система 35 содержит волюметрический всасывающий насос 26, который соединен со своим собственным электрическим двигателем 27 и имеет уровень защиты, подходящий для его установки на территории повышенной опасности, а также электронный блок 22 управления, который устанавливается на безопасной территории.
Объем улавливаемых паров зависит от скорости подачи топлива, и для того чтобы можно было выполнить это регулирование, блок 22 управления регистрирует импульсы, полученные от электронной головки 21 или непосредственно от импульсного генератора 20, и воздействует на скорость двигателя 27 насоса 26. Улавливаемые пары подаются в резервуар для хранения топлива через гибкую трубку 24, которая соосна с транспортировочной трубкой 23 для подачи топлива.
Система 35 улавливания паров может быть использована для всасывания паров обычного, высокооктанового и высокооктанового неэтилированного бензина.
Согласно предпочтительному, но не единственному варианту осуществления настоящего изобретения, электронный блок 22 управляет скоростью двигателя 27 бесщеточного типа и питается однофазным переменным током, гарантируя удовлетворительную работу при напряжении питания 230 В (номинальное значение) и частоте 50 Гц.
На практике электронный блок 22 управления получает на вход ряд опорных сигналов, которые соответственно обрабатываются, чтобы получить фактически линейную функцию, которая связывает объем паров, улавливаемых системой 35, с объемом отпускаемого топлива, хотя на самом деле эта функция не является линейной.
Поэтому необходимо ввести компенсационную кривую, которая для нескольких значений (определенных посредством предварительной калибровки, которая может быть проведена на реальном всасывающем насосе 26) опорного сигнала скорости, поданного на вход блока 22 управления, определяет фактическую скорость всасывающего насоса 26; входной опорный сигнал скорости блока 22 подается в виде сигнала прямоугольной формы с частотой между 0 и 200 Гц, который обычно подается от электронной головки 21, посредством импульсного генератора 20. Блок 22 управления имеет регулятор, так что он может приспосабливаться к различным амплитудам (обычно от +58 до +12 В или от +12 В до +35 В) сигнала, получаемого от импульсного генератора 20, и может соединяться с импульсными генераторами, которые в настоящее время наиболее широко представлены на рынке, выходной каскад которых может быть выполнен с открытым коллектором на транзисторе n-р-n типа, с открытым коллектором на транзисторе р-n-р типа, в виде бестрансформаторного двухтактного каскада или двухтактного каскада.
Коэффициенты скорости для компенсационной кривой получаются посредством устройства, которое дает возможность определить эти значения автоматически при различных скоростях подачи топлива; в альтернативном случае эти коэффициенты могут быть рассчитаны при помощи прикладной программы, которая устанавливается в электронный процессор, который позволяет хранить до 100 коэффициентов в интервале частот опорной скорости от 0 до 100 Гц.
Компенсационная кривая может, кроме того, быть модифицирована путем добавления или вычитания постоянного значения, полученного от построечного резистора, или посредством коэффициента, который может быть установлен при помощи процессора; интервал регулирования скорости находится в пределах 20%, в то время как направление вращения двигателя 27 может быть задано посредством переключателя или посредством самого процессора.
Электронный блок 22 управления имеет также вход для подключения датчика температуры, который помещен внутри двигателя 27; когда температура обмоток превышает заранее заданное значение, подача энергии прерывается до тех пор, пока температура не упадет ниже этого предела. В этих условиях светоизлучающий диод, который показывает рабочее состояние, указывает на отклонение от нормального режима путем прерывистого включения; а после заранее заданного числа блокировок и повторных запусков (которое может быть установлено) в пределах определенного периода времени (который также может быть установлен) система улавливания паров окончательно останавливается.
В качестве альтернативы датчику температуры двигателя 27 может быть использован датчик для измерения температуры окружающей среды.
Выходной каскад блока 22 управления снабжен датчиком, который измеряет температуру, так что когда температура превышает значение приблизительно 85°С, подача энергии к двигателю 27 прекращается, и светоизлучающий диод, который показывает рабочее состояние, зажигается; это состояние продолжается до тех пор, пока температура не упадет ниже этого предела. В дополнение к тепловой защите, имеется также защита, относящаяся к максимальному току, которая срабатывает, когда превышается заранее заданное значение силы тока, прерывая подачу энергии к двигателю 27, и затем снабжение энергией восстанавливается автоматически после ряда попыток, число которых может быть запрограммировано от минимального значения 1 до максимального значения 8.
Блок 22 управления также имеет последовательный коммуникационный порт типа RS485 для соединения с электронным процессором и устройством для калибровки и диагностики системы; в частности, согласно предпочтительным, но не ограничивающим изобретение вариантам его осуществления, имеется асинхронный полудуплексный последовательный интерфейс типа RS485 со скоростью 1200 бод, 8 битами данных, 1 стоповым битом и без контроля четности.
Для того чтобы взаимодействовать с электронным блоком 22, необходимо иметь электронный процессор (персональный компьютер), минимальная конфигурация которого следующая: 486-й микропроцессор, 4 Мб оперативной памяти, Windows 3.1 или более поздняя операционная система, интерфейс RS232-RS485; и посредством этого процессора могут устанавливаться следующие параметры:
- разрешающая способность входных импульсов, генерируемых импульсным генератором 20 (100/200 импульсов на литр топлива);
- разрешающая способность датчика углового положения двигателя 27 (2/4/8 импульсов на 1 оборот);
- направление вращения двигателя 27 (по часовой стрелке/против часовой стрелки);
- область регулирования скорости насоса 26 (±20%, от 5 до 60 литров топлива в минуту);
- ручное регулирование скорости;
- режим работы с фиксированной скоростью вращения двигателя 27;
- область регулирования скорости насоса 26 с фиксированным числом оборотов (от 5 до 60 литров в минуту);
- выбор режима работы с фиксированным или с переменным числом оборотов;
- число компенсационных коэффициентов;
- выделение адреса для последовательной оперативной связи;
- выбор последовательного коммуникационного порта.
Основные параметры, которые могут быть выведены для индикации, следующие (в виде коэффициентов между 0 и 127):
- температура окружающей среды или температура обмоток двигателя 27;
- температура выходного каскада блока 22;
- частота входных импульсов (от 0 до 200);
- частота импульсов, получаемых от датчика углового положения двигателя 27 (от 0 до 200);
- частичный итоговый объем отпущенного топлива (от 0 до 9999 литров);
- поправочные коэффициенты (от 0 до 120);
- смещение компенсационной кривой (от 0 до 127. причем нуль определяется числом 64);
- положение регулировочного резистора;
- сила тока, который протекает в двигателе 27;
- код ошибки (от 1 до 8).
Согласно настоящему изобретению, электрический двигатель 27 управляет скоростью вращения насоса 26, всасывающего пары, в зависимости от управляющих сигналов, которые поступают от блока 22 и преобразуются в соответствующие сигналы напряжения, которые подаются на двигатель 27; практически скорость, с которой двигатель 27 заставляет вращаться насос 26, и, следовательно, количество улавливаемых паров зависит от напряжения, приложенного к двигателю 27.
Уже было сказано, что для достижения максимальной эффективности системы 35 улавливания паров блок 22 управления должен управлять насосом 26 так, чтобы газообразная фаза извлекалась со скоростью, которая соответствует мгновенному значению объема пара, возникающего в процессе заполнения бака транспортного средства.
Блок 22 определяет оптимальное мгновенное значение скорости всасывающего насоса 26, обеспечивая тем самым нелинейную функцию с несколькими переменными, которые, в свою очередь, зависят от ряда независимых переменных, определяющих изменения объема паров, образующихся во время введения топлива в бак, т.е. путем поиска соответствующих значений в матрице, которая хранится в памяти микропроцессора.
Независимые переменные включают скорость подачи топлива, объем отпущенного топлива, длительность заправки, температуру окружающей среды, температуру топлива и любые сужения внутри возвратной трубки 24 для газообразной фазы. Другие независимые переменные также могут быть приняты во внимание во время процедуры управления.
Чтобы определить соответствующую скорость всасывающего насоса 26, мгновенные значения независимых переменных должны измеряться посредством ряда датчиков и преобразователей, и соответствующие сигналы, относящиеся к зависимым переменным, должны передаваться в блок 22 управления.
В частности, осуществляется построение по точкам кривой производительность/скорость, относящейся к используемому всасывающему насосу 26, принимая во внимание все входящие переменные; так, например, датчик для измерения расхода топлива подает сигнал, пропорциональный расходу отпускаемого топлива, в блок 22 управления, в то время как датчики температуры измеряют температуру окружающей среды и температуру топлива и передают мгновенное значение температуры в виде пропорционального сигнала в блок 22.
Начальная калибровка системы 35 улавливания паров выполняется посредством образцового насоса 26, и мгновенное значение функции, которая связывает переменные расхода пара V (улавливаемого)/ расхода жидкости L (подаваемого топлива), определяется при помощи микропроцессора, для того чтобы в результате регулировать оптимальную скорость двигателя 27 во время процесса заправки в соответствии с изменением всех входящих переменных, которые приводят к нелинейности функции V/L
В частности, в варианте схемы, показанном на фиг.4А-4D и относящемся к устройству управления, выполненному согласно изобретению, показаны выводы восьми соединителей, используемых в электронной плате системы для улавливания паров, которая обозначена позицией 35 на фиг.3.
Фиг.4А показывает электрические соединения с выводами Р1-1, Р1-2, P1-3, Р1-6, Р1-7, Р1-8, Р1-9, Р1-10, Р1-11, Р1-12 соединителя Р1 печатной платы, который обеспечивает передачу электрических сигналов от или в направлении импульсного генератора 20 или печатной платы ЦПУ электронного процессора, светоизлучающего сигнального диода, датчика температуры и датчика положения бесщеточного двигателя 27. В предпочтительных, но не ограничивающих изобретения вариантах его осуществления, используется 12-полюсный соединитель Р1 вертикального штыревого типа, например MSTBVA 2, 5/12-G-5,08.
Контакты Р1-1 и Р1-2 осуществляют соединение с импульсным генератором 20 (входной сигнал, отрицательный и положительный полюс соответственно), в то время как через контакт Р1-3 осуществляется питание (14,3 В, 100 мА) внешнего импульсного генератора 20; кроме того, контакты P1-8, P1-9 и Р1-10 позволяют проходить на вход печатной платы сигналам, относящимся к датчику положения двигателя 27 (согласно трем пространственным координатам X, Y и Z соответственно), в то время как контакт Р1-11 соединен с положительным полюсом (6,2 В) источника питания бесщеточного двигателя 27, а контакт Р1-12 представляет опорный уровень напряжения 0 В.
Контакты Р1-6 и Р1-7 относятся к имеющимся в наличии входам и к уровню напряжения 0 В, в то время как контакты J1-4 и J1-6 относятся к 6-полюсному соединителю J1 вертикального штыревого типа, например АМР MODU1 28037-2, и образуют соответственно выходной контакт для изолированного импульсного сигнала, передаваемого в направлении платы интерфейса (которая используется, если система 35 для улавливания паров предназначена для системы распределения со многими видами топлива, т.е. для колонки 10 с несколькими распределительными пистолетами 18 для различных продуктов), и контакт, относящийся к имеющемуся в наличии входу.
Фиг.4А также показывает соединения контактов Р5-1, Р5-2, Р5-3, Р5-4 четырехполюсного соединителя Р5 электронной платы системы улавливания паров; в частности, соединитель Р5 вертикального штыревого типа, например АМР MODU2 280371-2, обеспечивает прохождение электрических сигналов от и в направлении интерфейсной платы типа RS485 или RS422, или программирующего терминала.
Так, например, контакт Р5-1 присоединен к положительному (5 В) полюсу источника питания интерфейса, контакты Р5-2 и Р5-3 входа и выхода присоединены к двум линиям, по которым сигналы передаются от интерфейса и к интерфейсу, в то время как контакт Р5-4 зарезервирован для соединения с уровнем 0 В.
Фиг.4В иллюстрирует соединения платы с контактами Р2-1, Р2-2, Р2-3 соединителя Р2, 3-х полюсным, вертикального штыревого типа, например MSTBVA 2,5/3-G-5, 08, и с контактами Р1-4 и Р1-5 соединителя Р1; контакты Р2-1, Р2-2, Р2-3 позволяют подавать выходные электрические сигналы на бесщеточный двигатель 27 и относятся к различным фазам этого электрического двигателя 27, в то время как контакты Р1-4 и Р1-5 осуществляют вывод электрического сигнала, питающего (положительный полюс и отрицательный полюс) индикаторный светоизлучающий диод. Контакт J1-5 соединителя J1 относится к выходному сигналу ошибки.
Фиг.4С показывает соединения контактов Р3-1, Р3-2, Р3-3, Р3-6, Р3-7, Р3-8, Р3-9, Р3-10, Р3-11, Р3-12 соединителя Р3 (такого же типа и выполняющего те же функции, что и соединитель Р1) и контактов J2-4 и J2-6 соединителя J2 (такого же типа и выполняющего те же функции, что и соединитель J1).
Наконец, фиг.4D показывает соединения контактов Р3-4, Р3-5 соединителя Р3, соединения контактов J1-1, J1-2, J1-3 соединителя J1, соединения контактов J2-1, J2-2, J2-3, J2-5 соединителя J2, соединения контактов J3-1, J3-2 соединителя J3 (двухполюсного, вертикального штыревого типа, например АМР MODU1 280609-2, который обеспечивает передачу сигналов от и в направлении соединителя J1 и напряжения 36 В питания электронной платы для системы улавливания паров) и соединения контактов Р4-1, Р4-2, Р4-3 трехполюсного соединителя Р4 вертикального штыревого типа, например, MSTBVA 2,5/3-G-5,0.8, к которому подключается электрический двигатель 27, так как выходные сигналы управляют фазой.
Фиг.5, которая относится к схеме управления бесщеточным двигателем с цифровым приводом, показывает контакты Р1-1, Р1-2 (относящиеся ко входам импульсного генератора 20), Р1-3, Р1-4 (относящиеся к выводам сигнального светоизлучающего диода), Р1-5, Р1-6 (относящиеся к линии для присоединения датчика температуры), Р1-7, Р1-8, Р1-9 (относящиеся к другим соединениям с датчиками), и Р1-10, Р1-11, Р4-1, Р4-2 (относящиеся к соединениям с сетью питания постоянным током).
Кроме того, контакты Р2-1, Р2-2 и Р2-3 относятся к соединениям с фазами статора бесщеточного двигателя, в то время как контакты Р3-1, Р3-2, Р3-3, Р3-4 обеспечивают соединение с последовательной линией RS485.
Для того чтобы определить функцию, которая связывает объем улавливаемого пара (V) с объемом подаваемой для заправки жидкости (L), на основе ряда экспериментальных данных, рассчитанных посредством системы улавливания паров с образцовым всасывающим насосом и предварительной настройкой, микропроцессор 40 создает таблицу значений, относящихся к зависимым переменным, которые хранятся в одномерной или многомерной матрице (находящейся в энергонезависимой памяти), в соответствии с числом независимых переменных, от которых зависит функция V=f(L), которую нужно определить.
Интервал значений, которые может принимать каждая независимая переменная, может быть выбран так, чтобы охватить весь диапазон соответствующих значений, которые могут быть измерены в течение всего процесса заправки; микропроцессор 40 использует эту же таблицу значений и обновляет их при каждой успешной операции заправки топливом.
Независимые переменные могут быть выбраны так, чтобы наилучшим образом смоделировать обычные рабочие условия системы улавливания паров во время процесса заполнения бака транспортного средства. Для этой цели также необходимо обеспечить соответствующую емкость используемой энергонезависимой памяти.
Вычисление функции V=f(L), которая сделана линейной, используется для выработки сигнала, управляющего скоростью всасывающего насоса 26; наконец, для того, чтобы обеспечить более точное управление, двигатель 27 соединяется с микропроцессором 40 блока 22 посредством блока обратной связи, так что в этом случае сигнал обратной связи передается от двигателя 27 к микропроцессору 40, и последний может вырабатывать соответствующие управляющие сигналы для определения мгновенной скорости насоса 26, принимая во внимание обратную связь.
На практике во время заправки потребителем бака система 35 улавливания паров отслеживает в качестве переменных температуру окружающей среды и объем отпущенного топлива. Температура окружающей среды измеряется непосредственно преобразователем температуры, и соответствующий сигнал передается к микропроцессору 40 электронного блока 22, в то время как объем отпущенного топлива определяется путем измерения потока при помощи специального датчика; по существу, во время заправки импульсный генератор 20 посылает серию импульсов через головку 21 к микропроцессору 40, который хранит в памяти число импульсов, которое было сосчитано к моменту завершения заправки транспортного средства, и вычисляет объем отпущенного топлива на основе этого числа. Микропроцессор 40 также продолжает получать сигнал обратной связи от двигателя 27, чтобы получить точное управление скоростью насоса 26 и компенсировать отсутствие линейности.
Микропроцессор 40 электронного блока 22 управления может также включать таймерное устройство, которое измеряет промежуток времени между двумя успешными заправками, так что если этот промежуток времени больше определенного заранее заданного значения, и, следовательно, хранящиеся данные (зависимые переменные), которые относятся к экспериментальным результатам и заданы на кривой V/L, не очень точны, измеряются новые значения переменных, которые записываются в электронный блок 22.
В качестве альтернативы описанному ранее решению, согласно другому варианту осуществления настоящего изобретения можно хранить в электронном блоке 22, снабженном микропроцессором 40, таблицу или матрицу со 120 строками и двумя столбцами, в которой первый столбец содержит значения, относящиеся к частоте на входе (в интервале частот между 0 и 100 Гц), соответствующие сигналу, получаемому от импульсного генератора 20. а второй столбец содержит ряд значений частоты на выходе. соответствующих числу оборотов, при котором должен работать насос 26 для всасывания и улавливания паров.
Предусмотрено 120 строк матрицы, т.е. на 20 больше, чем частотный интервал 0-100 Гц, чтобы иметь разумный запас для регулирования.
Система регулирования этого типа делает возможной корректировку характеристической кривой всасывающего насоса 26 и отношения V/L всей системы 35 улавливания паров, если ниже системы 35 (по направлению потока) существует различный напор.
Матрица заносится в соответствующий элемент энергонезависимой памяти (например, память типа EEPROM), встроенной в микропроцессор 40, что делает возможным сохранение данных даже тогда, когда отсутствует питание, а также дает возможность модифицировать данные в любое время.
Матрица заполняется рядом данных, полученных экспериментально от эталонного набора всасывающих насосов 26, так что компенсационная кривая получается путем интерполяции (процесс, который выполняется соответствующим электронным процессором) по нескольким точкам, в которых тестируется вся система 35 улавливания паров.
Интерполяция осуществляется посредством соответствующей электронной системы калибровки, которая может передавать полученные результаты блоку 22 управления системы 35 улавливания паров.
Система 35 улавливания паров, о которой идет речь, может регулироваться при помощи потенциометра (подстроечного резистора), присутствующего на электронной плате системы 35, который дает возможность смещать заданную по умолчанию кривую, хранящуюся в микропроцессоре 40, т.е. делает возможным путем смещения этой кривой посредством передачи некоторой данной величины в последовательный порт на электронной плате системы 35 улавливания паров исключить функцию этого подстроечного резистора и использовать регистр с теми же функциями, что у подстроечного резистора.
Посредством внешнего калибровочного устройства, которое соединено с измерителем, можно также смоделировать ряд операций заправки с различными расходами потока, результаты этого моделирования интерполируются, чтобы получить характеристическую кривую, что может быть выполнено непосредственно в электронном управляющем блоке 22.
Использование электронного устройства управления согласно изобретению может, таким образом, ограничить изменение требуемого критического значения (отношения V/L), когда происходит изменение возможных условий работы системы улавливания паров; в сущности, основное изменение в условиях работы вызывается изменением расхода, который для распределительного устройства в виде моноблока с производительностью 50 литров в минуту может рассматриваться как переменная приблизительно между 50 и 5 л/мин. Понятно, что качественная оценка системы улавливания паров определяется тем, что кривая V/L или L/V является постоянной, насколько возможно, в рабочей области, и объективная оценка выполнения этого условия состоит в большем или меньшем изменении параметра V/L, т.е.
ΔV/L=V/L max-V/L min
Полученные экспериментальные результаты показали полную пригодность системы, выполненной согласно настоящему изобретению; фактически, кроме системы улавливания паров согласно изобретению, с целью быстрого и ясного сравнения данных были оценены две обычные системы, а именно, система улавливания паров с насосом с изменяемым числом оборотов, которым управляют электронным путем (в котором число оборотов пропорционально расходу подаваемого для заправки топлива в соответствии с коэффициентом пропорциональности), и система с насосом с фиксированным числом оборотов, которым управляют механически с помощью двигателя и который снабжен пропорциональным клапаном (где число оборотов насоса пропорционально числу оборотов, совершаемых двигателем, в соответствии с коэффициентом пропорциональности).
График в декартовых координатах на фиг.6 относится к экспериментальным данным для отношения V/L (в процентах) в зависимости от ряда значений расхода (в литрах в минуту), которые были получены для системы, использующей насос с фиксированным числом оборотов, управляемый механически.
График в декартовых координатах на фиг.7 дополнительно показывает экспериментальные данные для отношения V/L (в процентах) в зависимости от ряда значений расхода (в литрах в минуту), которые были получены для системы, использующей насос с переменным числом оборотов, управляемый электронным путем.
Если сравнить графики, то очевидно, что хотя в случае системы, использующей насос с переменным числом оборотов, управляемый электронным путем, получаются лучшие результаты, чем в случае системы, использующей насос с фиксированным числом оборотов, управляемый механически, но, с точки зрения постоянства отношения УЛ, посредством этой системы нельзя полностью исключить изменение V/L в рабочей области, как показывает кривая на фиг.7, усредненная для экспериментальных значений.
Однако последняя кривая дает возможность получить кривую корректировочных калибровочных значений, которые нужно использовать в системе улавливания паров согласно настоящему изобретению, чтобы линеаризовать реакцию системы. В сущности, график на фиг.8 показывает кривую корректировочных коэффициентов для случая, когда имеет место изменение рабочей точки или расхода потока Q, эта кривая может быть использована в системе улавливания паров согласно изобретению: в этом случае число оборотов используемого насоса зависит от расхода потока подаваемого топлива.
Большое число точек, в которых можно найти значения кривой (приблизительно 100), допускает практически непрерывную линеаризацию системы, обеспечивая точное управление отношением V/L или L/V во всей рабочей области; с другой стороны, можно видеть, что обе известные системы улавливания паров имеют серьезные ограничения на краях рабочей области (см. фиг.6 и 7), которые не могут быть скорректированы при любых обстоятельствах, за исключением использования управляющей системы нелинейного типа, описанной выше.
Приведенное описание раскрывает характеристики устройства и способа управления улавливанием паров в распределительных топливных колонках и делает очевидным, что устройство и способ согласно изобретению имеют значительные преимущества в сравнении с известными ранее; по меньшей мере, следующие из этих преимуществ заслуживают упоминания:
скорость работы;
максимальная точность результатов;
более низкая стоимость при эксплуатации как результат получаемых преимуществ;
скорость регулировки и разрешающая способность функций управления.
Реферат
Изобретение относится к области раздачи топлива транспортным средствам. Для управления улавливанием паров топлива в распределительных топливных колонках используют электронный блок управления, с которым связан ряд опорных сигналов, обрабатываемых так, чтобы сделать практически линейной функцию, связывающую объем паров, улавливаемых системой улавливания паров, с объемом отпущенного топлива. По этой причине вводят компенсационную кривую для нескольких переменных, которые определяются эмпирически путем предварительной калибровки всасывающего насоса, и на основе опорного сигнала, подаваемого в блок управления, определяет фактическую скорость электрического двигателя, который соединен с насосом. При использовании указанной системы увеличивается скорость работы, точность результатов и разрешающая способность функций управления. 4 з.п. ф-лы, 12 ил.

Формула
Документы, цитированные в отчёте о поиске
Система безопасного возврата паров в установке заправки горючим
Комментарии