Устройство для закрывания емкостей - RU2468985C2
Код документа: RU2468985C2
Чертежи



Описание
Изобретение относится к укупорочной машине согласно ограничительной части пункта 1 формулы изобретения.
Укупорочные машины для закрывания бутылок при помощи навинчивающихся пробок, фиксируемых при навинчивании или завинчивании на наружную со стороны бутылок резьбу на участке горловины бутылки, известны в различных вариантах выполнения.
По существу, накладывание соответствующего затвора происходит затворным элементом или закаточным конусом, в котором фиксирован затвор бутылки до накладывания на бутылку и который приводится во вращательное движение приводом для накладывания затвора на бутылку или для завинчивания.
Во время всего процесса закрывания в укупорочной машине всегда требуется вследствие геометрических характеристик изменять расстояние между нижней кромкой закаточного конуса и верхним краем горловины бутылки, например, для выравнивания образующегося в процессе навинчивания изменения расстояния между нижней кромкой конуса и горловиной бутылки. В определенных вариантах выполнения известных укупорочных машин это происходит вследствие того, что нижняя кромка закаточного конуса остается на высоте плоскости, в то время как закрываемая емкость производит все необходимые движения по высоте плоскости.
Известные укупорочные машины, в частности машины для укупорки емкостей навинчивающимися крышками, а также машины для укупорки емкостей крончатыми колпачками (пробками), имеют на приводимом во вращательное движение вокруг вертикальной оси машины столе несколько положений закрывания, соответственно с одним закрывающим инструментом, а также с одним держателем бутылки или держателем емкости, управляемым при вращении вращающегося стола подъемным эксцентриком с возможностью движения вверх и вниз, в частности, для соединения соответствующей бутылки с закрывающим инструментом перед закрыванием, а также для разделения закрытой бутылки и закрывающего инструмента.
В известных укупорочных машинах подведение бутылок при завинчивании достигают, например, при приподнимании держателя бутылок.
В другом варианте выполнения известной укупорочной машины закрываемая емкость остается на высоте плоскости, в то время как закаточный конус производит все необходимые движения по высоте плоскости или в вертикальном направлении.
Известны также формы выполнения, при которых как емкость, так и закаточный конус производят часть необходимых движений по высоте плоскости.
Известны также укупорочные машины, закрывающие емкости посредством того, что затвор, например, крончатый колпачок пластично деформируют целенаправленным действием усилия, вследствие чего закрываемую емкость закрывают прочно. В таких укупорочных машинах также происходит изменение расстояния между горловиной емкости и закаточным конусом. Необходимое при навинчивающихся затворах вращательное движение отпадает.
Во всех известных выполнениях укупорочных машин необходимые движения по высоте плоскости реализуют посредством комбинации из предпочтительно неподвижного подъемного эксцентрика и вращающихся вокруг оси машины, скатывающихся по подъемному эксцентрику или скользящих контактных элементов, снимающих движение по высоте от подъемного эксцентрика и переносящих его к перемещаемым по высоте плоскости конструктивным элементам.
Такие подъемные эксцентрики уже давно известны специалисту, поэтому в этом месте можно отказаться от описания таких подъемных эксцентриков.
Недостатком в таких приводах с подъемным эксцентриком является то, что их нельзя универсально изменять после их изготовления, так что даже самые маленькие изменения в заданном характере движения по высоте плоскости обязательно требуют изготовления нового подъемного эксцентрика.
Также большим недостатком является то, что такие подъемные эксцентрики относительно быстро изнашиваются и поэтому их нужно заменять после определенного количества часов эксплуатации. К тому же, поскольку эти подъемные эксцентрики расположены в дополнение ко всему, как правило, в основании укупорочных машин, их замена является очень трудоемкой и дорогой, что на практике также нежелательно.
Из публикации WO 2005/007556 А1 известно устройство, у которого в каждом месте закрытия предусмотрен электродвигатель. Для достижения вертикального линейного перемещения, необходимого для процесса закрывания, эти электродвигатели действуют соответственно через приводной ремень на зубчатую рейку, тем самым эта зубчатая рейка может перемещаться в вертикальном направлении вперед и назад. На нижнем конце зубчатой рейки установлено собственное закрывающее устройство. Недостатком такого устройства является то, что в соединении между приводным ремнем и зубчатой рейкой всегда неизбежно имеется зазор, в результате чего не может быть определено точно положение по высоте укупорочного устройства, в результате чего могут повредиться сосуды или сосуды будут закрыты недостаточно, что на практике не желательно.
Задача предлагаемого изобретения состоит в создании такой укупорочной машины, с помощью которой устраняются указанные недостатки.
Для этого данное изобретение предусматривает выполнение укупорочных машин, в которых полностью отказываются от известных приводов с подъемным эксцентриком. Для этого предлагается применение управляемого или регулируемого привода для реализации необходимых движений по высоте.
Соответствующая укупорочная машина является предметом пункта 1 формулы изобретения, усовершенствованные варианты изобретения составляют предмет зависимых пунктов формулы изобретения.
Далее приводится более подробное описание изобретения посредством чертежей на примерах выполнения. На чертежах показаны:
фиг.1 - соответствующая уровню техники укупорочная машина;
фиг.2 - детальное изображение в частичном разрезе одного из закрывающих узлов соответствующей изобретению укупорочной машины в компоновке машины для укупорки емкостей навинчивающимися крышками;
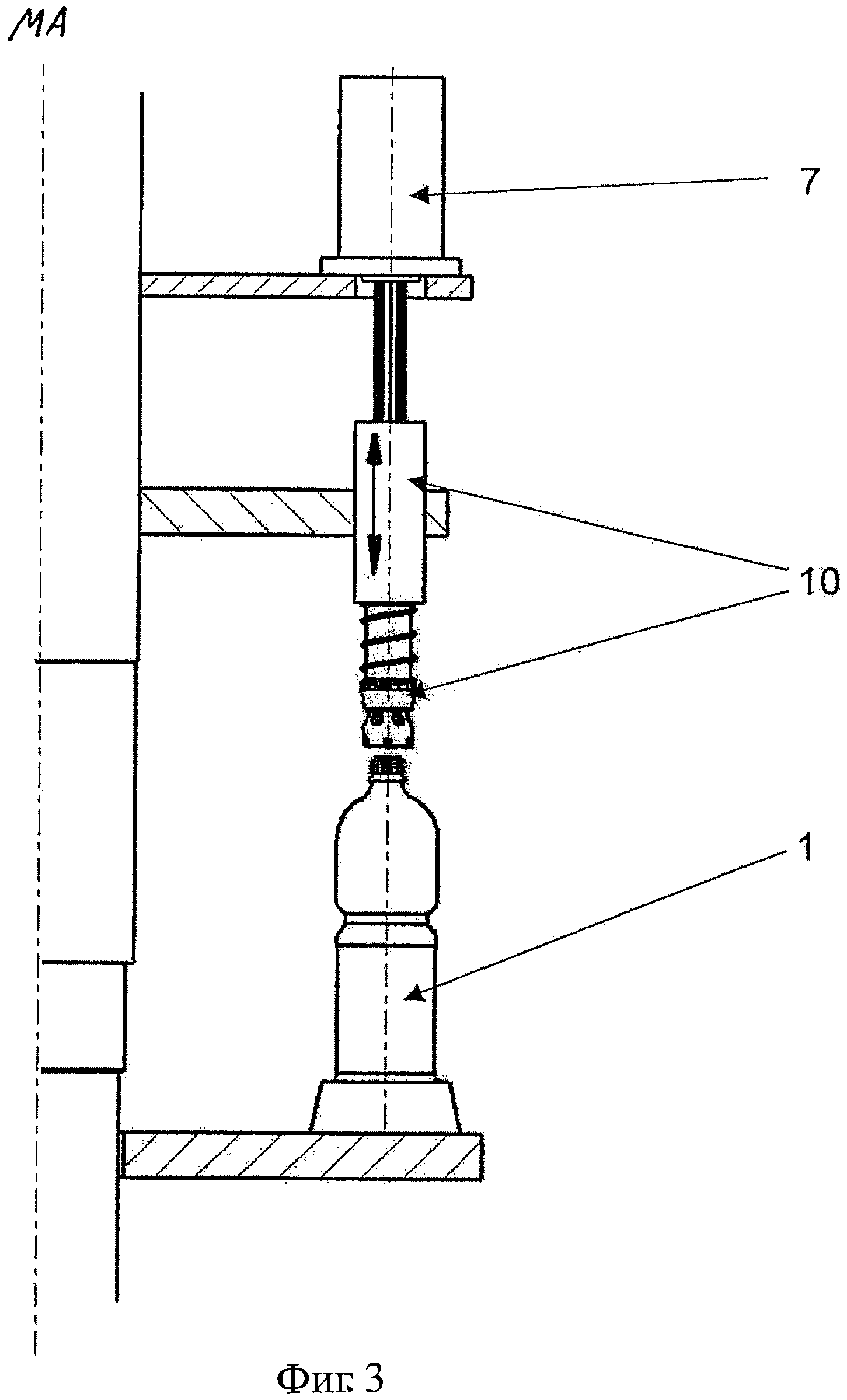
фиг.3 - детальное изображение в частичном разрезе одного из закрывающих узлов соответствующей изобретению укупорочной машины в компоновке для укупорки емкостей крончатыми колпачками (пробками);
фиг.4 - частичное изображение вида сверху усовершенствованного варианта данного изобретения с применением линейных приводов;
фиг.5 - чертеж общего вида возможной компоновки магнитов разной полярности.
На фиг.1 изображена соответствующая уровню техники укупорочная машина. Закрываемая емкость 1, в изображенном примере - бутылка с ободком горлышка и навинчивающейся пробкой, находится непосредственно под закаточным конусом 2. Закрываемая емкость 1 фиксирована на подъемном штоке 3 с возможностью движения в вертикальном направлении, прилегающем посредством ролика 4 и под предварительным напряжением пружины к подъемному эксцентрику 5. Посредством этой компоновки вращающаяся вокруг оси МА машины и закрываемая емкость 1 следует за соответствующей высоте хода поверхностью скольжения подъемного эксцентрика 5.
Для закрытия емкости 1 в показанном примере предусмотрен завинчивающийся шпиндель 6, управляемый управляемым или регулируемым приводным двигателем 7.
В рамках данного изобретения под понятием "Управляемый или регулируемый приводной двигатель" предусматривается такой приводной двигатель, который наряду с прочим может управляться, предпочтительно регулироваться, в отношении его числа оборотов, его угла поворота, его суммарного угла поворота, его крутящего момента, его углового ускорения и его углового замедления. Известными вариантами выполнения являются, например, серводвигатели или шаговые двигатели.
На фиг.2 показана соответствующая изобретению укупорочная машина в компоновке машины для укупорки емкостей навинчивающимися крышками. Известный из уровня техники привод с подъемным эксцентриком для вертикальных движений заменен в соответствии с техническим решением данного изобретения на отдельно предусмотренный предпочтительно для каждого закрывающего узла управляемый или регулируемый приводной двигатель 7 с относящимся элементом движения, например, шпинделем 8 с винтовой резьбой.
Равноценно со шпинделем 8 с винтовой резьбой также можно использовать все известные специалисту другие возможности для создания управляемого или регулируемого линейного движения. Однако при этом речь не может идти, например, исключительно о ременном приводе и/или реечном приводе и/или линейном моторе.
Предпочтительно каждый приводной двигатель 7 оснащен датчиком углового положения или же также измерителем пути возвратно-поступательного движения.
Данное изобретение впервые позволяет выполнять свободное программирование необходимых движений по высоте, необходимых для закрывания, в частности, для укупорки навинчивающимися крышками или также укупорки крончатыми колпачками (пробками).
Это делает возможным простым способом осуществлять перенастройку движения по высоте каждого отдельного закрывающего узла, а вследствие этого также всей укупорочной машины в соответствии с изменившимися требованиями, так сказать, нажатием кнопки. Эти изменения могут возникать, например, при наличии других видов бутылок с измененной длиной навинчивающейся пробки. Однако другие изменения могут возникать из-за изменения используемого затвора, например, из-за замены стандартной навинчивающейся пробки на так называемый затвор типа sport cap (для "спортивных колпачков").
Как описано выше, отдельные укупорочные узлы с укупоривающей машиной вращаются вокруг оси МА машины, причем горловина емкости и/или закаточный конус/закаточный инструмент получают во время оборота вокруг оси МА машины другие положения по высоте в зависимости от положения угла в данный момент в пределах одного оборота. Этот заданный профиль движения заложен в блоке управления машины для каждого ожидаемого варианта применения и может вызываться в ней обслуживающим машину лицом, вследствие чего перенастройка на новые требования по существу заканчивается.
Проблемы, связанные с конструированием, изготовлением, монтажом и износом известных подъемных эксцентриков, полностью отпадают.
На фиг.3 показана соответствующая изобретению укупорочная машина в компоновке для укупорки емкостей крончатыми колпачками (пробками).
В противоположность примеру выполнения, представленному на фиг.2, речь идет в данном случае об укупорочной машине, в которой емкость 1 закрывают пластично деформируемым затвором, например, крончатым колпачком 9.
Из уровня техники известно, что в таких укупорочных машинах необходимое движение по высоте закрывающего поршня 10 реализуют с помощью подъемного эксцентрика.
Согласно изобретению предусмотрено реализовывать это движение по высоте закрывающего поршня 10 посредством управляемого или регулируемого приводного двигателя 7 в сочетании с подходящим элементом линейного движения, например, шпинделем 8 с винтовой резьбой.
Относительно другого технического решения и возникающих при его применении преимуществ описанное выше аналогично имеет силу.
На фиг.4 показано другое, особенно предпочтительное выполнение данного изобретения.
Этот вариант выполнения отличается тем, что в каждом закрывающем узле для подъемного движения и/или вращательного движения используют линейные двигатели (двигатели бегущей волны). Такие линейные двигатели или двигатели бегущей волны достаточно известны специалисту, так что в этом месте следует подробнее пояснить только лишь относящиеся к изобретению аспекты.
Линейные двигатели отличаются по существу неподвижным содержащим обмотки возбуждения статором и подвижным ротором. При этом подвижный ротор может выполнять вращательные движения и/или поступательные движения.
Согласно изобретению в данном случае предусмотрено выполнять завинчивающий шпиндель 6 машины для укупорки емкостей навинчивающимися крышками, или закрывающий поршень 10 машины для укупорки емкостей крончатыми колпачками (пробками), в качестве ротора. Для этого завинчивающий шпиндель 6, или закрывающий поршень 10 выполнен так, что они имеют необходимые магниты 13, требуемые для создания линейных движений и/или вращательных движений.
Сначала по окружности завинчивающего шпинделя 6 располагают статор 11 для создания вращательного движения. Посредством подходящей компоновки и управления содержащимися в этом статоре обмотками возбуждения известным специалисту способом становится возможным создание желаемых вращательных движений.
Дополнительно по окружности завинчивающего шпинделя 6 располагают другой статор 12 для создания линейного движения. Он действует, например, на магниты в пределах или по окружности завинчивающего шпинделя 6, имеющие разную полярность или ориентацию в вертикальном направлении.
Поступательные движения, как и вращательные движения завинчивающего шпинделя 6, могут производиться в сочетании со статорами 11 и 12 как по очереди, так и одновременно посредством искусной компоновки множества магнитов в завинчивающем шпинделе 6, например, как в вертикальной, так и относительно к окружности завинчивающего шпинделя 6 в попеременной компоновке магнитов 6 разной полярности или ориентации, например, в шахматной компоновке.
В укупорочной машине в компоновке для укупорки емкостей крончатыми колпачками (пробками) для выполнения поступательного движения достаточна компоновка линейного двигателя.
Само собой разумеется, что техническое решение данного изобретения распространяется также на такие выполнения, в которых необходимые движения по высоте выполняются, по меньшей мере, частично емкостью 1 и/или, по меньшей мере, частично завинчивающим шпинделем 6 и/или, по меньшей мере, частично закрывающим поршнем 10.
Объем данного изобретения распространяется также на известные специалисту машины для термосваривания, также применяемые для закрытия емкостей. Так как эти машины по существу построены как машины для укупорки емкостей крончатыми колпачками (пробками), нет необходимости в следующем выполнении этой машины в отношении к применению технического решения данного изобретения.
Реферат
Машина для укупоривания бутылок или подобных емкостей при помощи затворов с множеством закрывающих узлов, образованных по окружности приводимого во вращение вокруг вертикальной оси МА машины ротора, и держателем емкости и закрывающим инструментом. Для выполнения необходимых для процесса закрывания движений по высоте на каждом закрывающем узле расположен отдельный, управляемый и регулируемый приводной двигатель (7) с относящимся к нему элементом движения. Указанный приводной двигатель (7) действует на элемент движения, образованный как шпиндель (8) с винтовой резьбой и/или как ременный привод, с возможностью осуществлять перенастройку движения по высоте каждого отдельного закрывающего узла. Изобретение обеспечивает точное определение положения по высоте укупорочного устройства относительно емкости, что позволяет полностью закрыть емкость без ее повреждения. 11 з.п. ф-лы, 7 ил.
Комментарии