Усовершенствованный способ управления подъемной системой - RU2742497C2
Код документа: RU2742497C2
Чертежи




Описание
Настоящее изобретение относится к усовершенствованному способу установки и управления системой подъема грузов, предпочтительно автотранспортных средств. Кроме того, настоящее изобретение относится к подъемной системе, устанавливаемой и управляемой согласно указанному способу, а также к передвижной подъемной стойке с усовершенствованным пользовательским интерфейсом, подходящей для использования в качестве составной части указанной подъемной системы. Оборудование для подъема автотранспортных средств, которое обычно используется в мастерских для обеспечения доступа пользователей к нижним частям автотранспортных средств для выполнения операций по техническому обслуживанию и/или ремонту, известно.
Среди известного подъемного оборудования для автотранспортных средств существует такое, которое состоит из множества передвижных стоек независимых механически, но соединенных на электронном уровне и находящихся в коммуникационном взаимодействии одна с другой посредством кабеля или беспроводной сети.
В частности, каждая передвижная стойка содержит вертикальную опору, вдоль которой вертикально скользит каретка с горизонтальными кронштейнами для зацепления соответствующих участков поднимаемого автотранспортного средства. Стойка также оснащена исполнительным механизмом, например, электромеханического или гидравлического типа для подъема/опускания каретки относительно вертикальной опоры, а также соответствующей системой управления и дисплеем для организации интерфейса с пользователем.
В противоположность этому, на известном уровне техники в патенте US 2009/0236183 предложена подъемная система, где каждая стойка системы оснащена интерфейсом с дисплейным экраном, на котором изображено положение каждой стойки по отношению к другим стойкам системы и относительно транспортного средства; в частности, с этой целью все стойки системы изображены графически на дисплейном экране рядом с соответствующим графическим символом, изображающим транспортное средство. Следовательно, за счет этого пользователь может распознавать взаимное расположение стоек между собой и относительно транспортного средства, используя интерфейс отдельной стойки, для того чтобы выбирать и управлять стойками, не присваивая им идентификационного номера и не проверяя, где они расположены физически.
В частности, для регистрации стойки в подъемной системе пользователь выбирает соответствующую кнопку в командном интерфейсе каждой стойки, которая отражает положение этой стойки относительно транспортного средства и графически связана с ним.
Соответственно, в такой системе после установки подъемной системы (т.е. регистрации стоек в качестве составных частей такой системы) расположение каждой стойки относительно других стоек и по отношению к транспортному средству является обязательным и всегда должно быть одинаковым, в том числе в случае переноса системы на другие транспортные средства.
Например, если при регистрации новой стойки в подъемной системе она связана с рабочим положением на переднем правом колесе, то такая связь должна сохраняться всегда для любого последующего использования подъемной системы, заданной таким образом. Другими словами, каждый раз, когда используется эта система, данная стойка всегда должна располагаться на переднем правом колесе поднимаемого транспортного средства, это также относится и к взаимному расположению, заданному для всех других стоек системы.
Легко понять, что такой способ регистрации не облегчает и не ускоряет процесс переноса стоек, являющихся частью этой подъемной системы, с одного транспортного средства на другое.
В этой известной системе, как только система скомпонована, также могут быть созданы группы одновременно срабатывающих стоек, которые включают в себя как минимум две стойки, расположенные на одной линии/напротив друг друга относительно поперечной оси транспортного средства.
В патенте WO 2015/005772 раскрыта подъемная система, состоящая по меньшей мере из двух стоек и оснащенная внешней системой управления (дистанционного управления) общей для всех стоек. В частности, пользователь воздействует на такую внешнюю и централизованную систему управления посредством идентификационного ключа, для того чтобы выбрать стойки, являющиеся составной частью подъемной системы.
В патенте US 2013/240300 раскрыта подъемная система, состоящая по меньшей мере из двух стоек, взаимодействующих друг с другом по беспроводному интерфейсу и при включении автоматически проверяющая наличие новых стоек, которые нужно добавить.
В патенте WO 2004/024612 раскрыта подъемная система, состоящая по меньшей мере из двух стоек, снабженная держателем для карточки для вставки идентификационной карточки. При таком решении главная стойка должна регистрироваться первой, и, кроме того, определенная последовательность, согласно которой другие стойки связаны с главной стойкой, определяет уникальный идентификационный код каждой стойки по отношению к другим стойкам.
Цель настоящего изобретения заключается в предложении усовершенствованного способа установки и управления системой подъема грузов, предпочтительно автотранспортных средств, который является улучшенным и/или альтернативным по отношению к традиционным способам.
Еще одна цель изобретения состоит в предложении способа, где первоначальное расположение и/или последующие операции по изменению расположения каждой стойки как по отношению к другим стойкам, так и по отношению к транспортному средству не являются обязательными и не задаются предварительно.
Еще одна цель изобретения состоит в том, чтобы предложить способ, где последовательность расположения различных стоек как по отношению к другим стойкам, так и по отношению к транспортному средству может быть абсолютно свободной, случайной и различаться в каждом конкретном случае.
Еще одна цель изобретения состоит в том, чтобы предложить способ, где после того как выполнена установка системы с передвижными стойками, такая система быстро и легко переносится с одного поднимаемого транспортного средства на другое.
Еще одна цель изобретения состоит в том, чтобы предложить способ, где среди всех стоек в самой системе может быть задана любая одна группа стоек, управляемых одновременно.
Еще одна цель изобретения состоит в том, чтобы предложить передвижную подъемную стойку с пользовательским интерфейсом простым в реализации, а также быстрым, легким и интуитивно понятным в использовании.
Еще одна цель изобретения состоит в том, чтобы предложить передвижную подъемную стойку с пользовательским интерфейсом, который облегчает работу пользователя на этапе выравнивания/перекомпоновки стоек.
Еще одна цель изобретения состоит в том, чтобы предложить подъемную систему с передвижными стойками для подъема автотранспортных средств, которая позволяет устранить недостатки традиционных систем, а также является простой, быстрой и позволяет интуитивно выполнять процедуры по ее созданию, установке и управлению.
Еще одна цель изобретения состоит в том, чтобы предложить подъемную систему с передвижными стойками, которая предупреждает пользователя о неправильном относительном расположении одной или нескольких стоек системы.
Еще одна цель изобретения состоит в том, чтобы предложить подъемную систему с передвижными стойками, имеющую альтернативные характеристики по отношению к традиционным системам как в конструктивном, так и в функциональном плане.
Еще одна цель изобретения состоит в том, чтобы предложить подъемную систему с передвижными стойками, которую можно просто и быстро изготовить с низкими издержками.
Все эти цели достигаются согласно изобретению с помощью способа, имеющего особенности, указанные в п. 1 формулы изобретения, с помощью передвижной стойки, имеющей особенности, указанные в п. 10 формулы изобретения, а также с помощью подъемной системы, имеющей особенности, указанные в п. 26 формулы изобретения.
Далее настоящее изобретение раскрывается дополнительно посредством конкретных целесообразных вариантов его осуществления, приводимых исключительно в качестве неограничивающих примеров со ссылкой на прилагаемые чертежи, где:
на Фиг. 1 (Fig. 1) показан вид передвижной стойки в аксонометрии в соответствии с изобретением,
на Фиг. 2 (Fig.2) показан ее вертикальный вид в разрезе,
на Фиг. 3 (Fig.3) показан вид нескольких подъемных стоек в аксонометрии перед установкой/созданием подъемной системы,
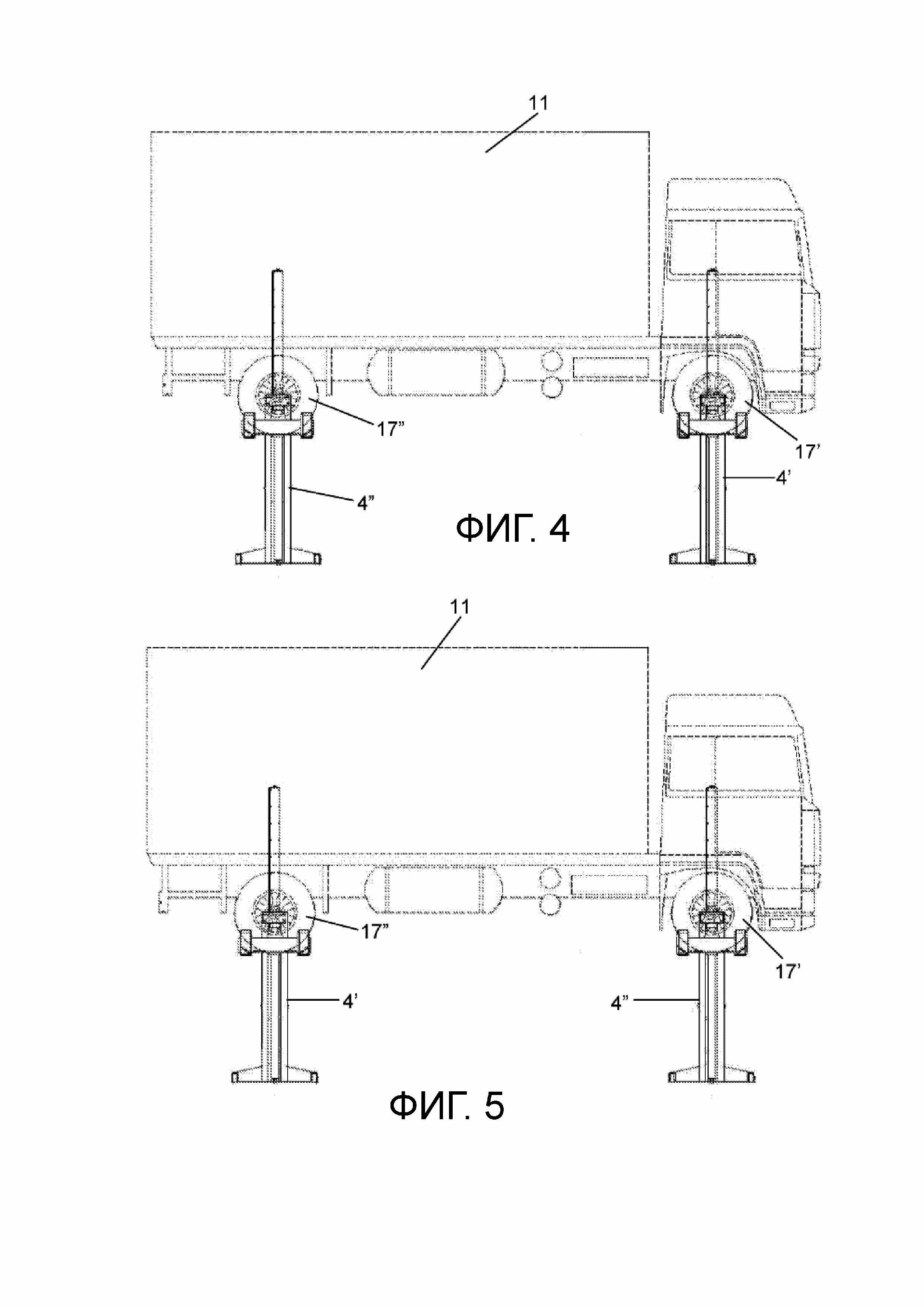
на Фиг. 4 (Fig.4) показан вид сбоку подъемной системы согласно изобретению в рабочем состоянии при первом расположении передвижных стоек,
на Фиг. 5 (Fig.5) показана та же самая подъемная система в том же виде и состоянии, как на Фиг. 4, при втором, отличающемся от первого, расположении передвижных стоек,
на Фиг. 6 (Fig.6) показан первый скриншот, отображаемый на устройстве дисплея, относящегося к интерфейсу передвижной стойки в соответствии с изобретением,
на Фиг. 7 (Fig.7) показаны символы, обозначающие различные режимы работы стойки,
на Фиг. 8, 9 (Fig. 8, 9) показаны соответствующие скриншоты с устройств дисплея, относящихся к интерфейсам двух передвижных стоек, образующих группу из двух одновременно управляемых стоек, и
на Фиг. 10 (Fig. 10) показан скриншот, воспроизводимый на устройстве дисплея для отображения/управления взаимным выравниванием подъемных механизмов стоек,
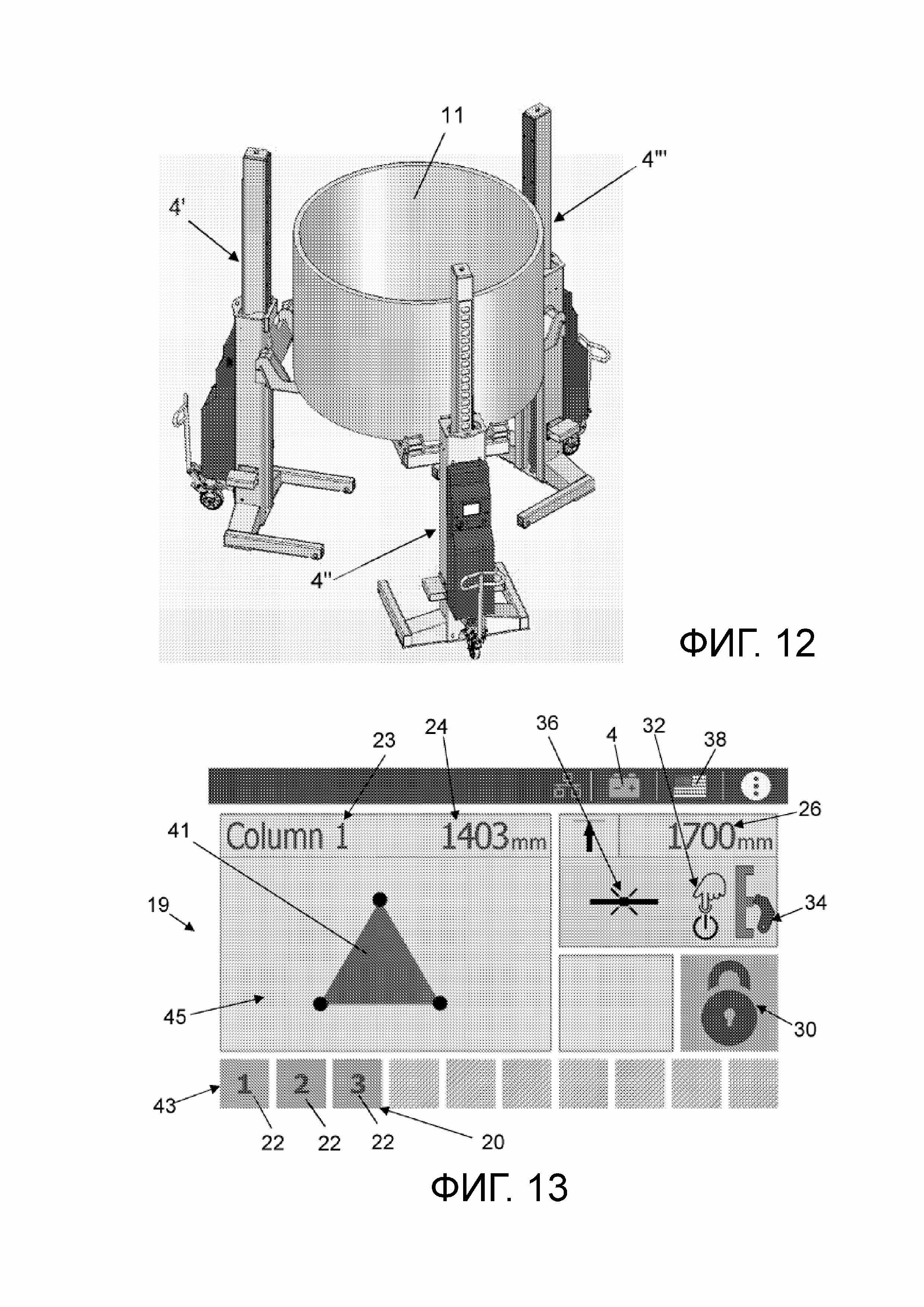
на Фиг. 11 (Fig. 11) показан вид в аксонометрии третьего варианта осуществления подъемной системы в соответствии с изобретением, расположенной вокруг груза, перед его подъемом,
на Фиг. 12 (Fig. 12) показан вид подъемной системы, изображенной на Фиг. 11, в аксонометрии во время подъема груза,
на Фиг. 13 (Fig. 13) показан скриншот с устройства дисплея передвижной стойки, входящей в состав подъемной системы, изображенной на Фиг. 11.
Как показано на чертежах, система 2 для подъема груза, предпочтительно автотранспортного средства, согласно изобретению содержит две или более передвижных стойки 4, которые являются механическими и конструктивно относятся к традиционному типу.
Удобно то, что в вариантах осуществления, изображенных на Фиг. 3-5, подъемная система 2 формируется из четырех передвижных стоек 4, однако при этом понятно, что такая система также может содержать только две стойки или шесть, или восемь, или более, в зависимости от количества колес поднимаемого автотранспортного средства.
В частности, как показано на Фиг. 1 и 2, каждая передвижная стойка 4 согласно изобретению содержит вертикальную опорную конструкцию 6, вдоль которой вертикально скользит подъемный механизм, содержащий каретку 8 с горизонтальными кронштейнами 9, предназначенными для зацепления определенных участков поднимаемого автотранспортного средства.
В частности, в нижней части вертикальная опорная конструкция 6 снабжена механизмом, например, тележкой с колесами 7 для ее перемещения внутри рабочих помещений.
Стойка 4 также снабжена исполнительным механизмом 3 электромеханического или гидравлического типа для перемещения подъемного механизма 8 и 9 вдоль вертикальной опорной конструкции 6, а также блоком управления и пользовательским интерфейсом 12.
В частности, пользовательский интерфейс 12 содержит устройство дисплея 13 и панель для конфигурации, снабженную устройством ввода, которое оперативно запускается пользователем. Например, пользовательский интерфейс 12 содержит сенсорный экран и/или экранный монитор, соединенный с клавиатурой/кнопочной панелью.
Кроме того, стойка 4 снабжена электромеханическим упором 14 для устойчивой блокировки вертикального перемещения каретки 8 относительно вертикальной опорной конструкции 6.
Передвижные стойки 4 системы 2 соединены между собой посредством кабеля и/или беспроводного интерфейса.
Как показано на Фиг. 3, перед тем как расположить передвижные стойки 4 вокруг транспортного средства, стойки просто группируют случайным образом без какой-либо определенной последовательности расположения в пространстве 15 рабочего помещения, например, в мастерской. Целесообразно, чтобы в таком нерабочем состоянии передвижные стойки 4 располагались особенно близко одна к другой, чтобы оптимизировать и минимизировать занимаемое ими общее пространство в рабочем помещении.
Поэтому для настройки и создания подъемной системы 2 из нескольких передвижных стоек 4 пользователь последовательно выполняет следующие операции.
Целесообразно, чтобы пользователь мог настроить и создать подъемную систему 2, в которой будет зарегистрировано количество передвижных стоек 4 равное, а возможно, и большее, чем это требуется для конкретной задачи или для конкретного применения. Например, для подъема транспортного средства 11, изображенного на Фиг. 4 и 5, пользователь определяет, что необходимо использовать четыре передвижные стойки 4 по одной на каждое колесо транспортного средства 11.
В частности, для того чтобы установить и создать подъемную систему 2, пользователь поочередно без какого-либо заранее установленного порядка подходит к пользовательскому интерфейсу 12 каждой передвижной стойки 4, которую необходимо зарегистрировать как относящуюся к системе 2 и удобно выбрать из тех, что имеются внутри рабочего пространства 15.
Поэтому для каждой стойки пользователь выполняет команду запуска, предусмотренную в соответствующем пользовательском интерфейсе 12 каждой из таких стоек, чтобы зарегистрировать их как относящиеся к подъемной системе 2, которую он устанавливает. В частности, выполняя такую команду запуска, пользователь активирует стойку без настройки и определения какого-либо взаимного расположения такой стойки относительно других стоек, ее положения относительно поднимаемого груза 11 и последовательности ее расположения по отношению к поднимаемому грузу 11.
Целесообразно, чтобы команда запуска для регистрации стоек 4 в подъемной системе 2 представляла собой управляющее воздействие, указывающее/определяющее количество стоек, составляющих систему (например, в раскрываемом примере пользователь может установить количество равное четырем во всех стойках).
Целесообразно, чтобы команда запуска для регистрации стоек 4 в подъемной системе 2 позволяла выбрать уникальный код идентификации (например, номер), установить и связать с ним каждую стойку. Удобно, чтобы такой уникальный идентификационный код был привязан пользователем к каждой стойке путем непосредственного воздействия на пользовательский интерфейс 12 соответствующей стойки (т.е. чтобы он не создавался и не привязывался автоматически самой системой или процессорным блоком каждой стойки). В частности, такой уникальный идентификационный код является независимым и не связан с последовательностью, в которой пользователь регистрирует каждую стойку в подъемной системе 2; таким образом, например, стойка 4, зарегистрированная первой в подъемной системе 2, может быть выбрана и привязана пользователем к числовому идентификационному коду, соответствующему номерам «три», «два» или «один».
Преимуществом является то, что команда запуска каждой стойки 4 в пользовательском интерфейсе 12 каждой стойки 4 конфигурируется и настраивается таким образом, чтобы не предоставлять и/или не привязываться к какой-либо информации и изображению в части расположения стоек 4 как по отношению друг к другу, так и относительно поднимаемого груза 11. Другими словами, команда запуска является независимой и не имеет графической и/или информационной привязки к положению стоек 4 как относительно друг друга, так и в отношении поднимаемого груза 11.
Затем пользователь поочередно выбирает стойки 4, которые были зарегистрированы как относящиеся к системе 2, и располагает их на колесах 17 поднимаемого транспортного средства 11 в любом порядке и совершенно свободно в части взаимного расположения стоек между собой или по отношению к грузу или в рабочих зонах, предусмотренных для подъема любого груза.
Подразумевается, что регистрация стоек 4 и подъемной системы 2 также может быть выполнена после их установки на колесах 17 транспортного средства 11 или в рабочих зонах, предусмотренных для подъема любого груза. В частности, в этом случае их размещение также осуществляется в любом порядке и без учета какого-либо взаимного расположения стоек как друг относительно друга, так и по отношению к грузу.
В частности, как видно из сравнения Фиг. 4 и Фиг. 5, каждая стойка 4 создаваемой таким образом подъемной системы 2 может быть установлена в любом рабочем положении по отношению к транспортному средству 11. Действительно, стойка 4', например, может располагаться на переднем правом колесе 17' транспортного средства 11 (см. Фиг. 4) или на заднем правом колесе 17'' того же транспортного средства (см. Фиг. 5), точно также как стойка 4'', например, может располагаться на заднем правом колесе 17'' транспортного средства 11 (см. Фиг. 4) или на переднем правом колесе 17'' того же транспортного средства (см. Фиг. 5).
Это имеет определенные преимущества, поскольку позволяет сократить рабочее время, если подъемную систему 2 с четырьмя стойками 4, которая ранее уже была установлена и использовалась для подъема первого транспортного средства, нужно использовать снова и выполнять ее повторную установку для подъема второго транспортного средства. В частности, установка/создание подъемной системы 2 согласно изобретению позволяет повторно использовать систему и свободно выполнять ее переустановку для подъема второго груза, после того как такая система уже использовалась для подъема первого груза, без какой-либо привязки к порядку выбора отдельных стоек и/или к их рабочему положению как относительно друг друга, так и относительно второго груза.
В частности, с этой целью программное обеспечение, загружаемое в блок управления каждой стойки 4 сконфигурировано с возможностью задания подъемной системы 2, в которой настраивается только количество элементов системы без установки и определения каких-либо связей в отношении их взаимного расположения, их расположения относительно поднимаемого транспортного средства и/или последовательности их расположения/запуска. Если говорить более подробно, чтобы это реализовать, целесообразно, чтобы указанное программное обеспечение было настроено на соединение и связь всех стоек системы между собой так, чтобы каждая стойка могла осуществлять коммуникационное взаимодействие с остальными стойками. В этом заключается отличие от известного уровня техники, когда вместо этого подъемная система состоит из нескольких пар стоек, каждая из которых содержит поперечно выровненные стойки, соединенные и связанные друг с другом попарно.
После того как все стойки 4 подъемной системы 2 были размещены на колесах 17 транспортного средства 11 или в соответствующей рабочей зоне, пользователь подходит к одной из стоек 4 подъемной системы 2 и, воздействуя на ее пользовательский интерфейс 12, присваивает указанной стойке функцию управляющей стойки по отношению к другим стойкам, которые, следовательно, становятся управляемыми стойками.
Таким образом, воздействуя на пользовательский интерфейс 12 управляющей стойки, пользователь формирует команду на одновременный подъем/опускание по меньшей мере одной или всех стоек системы, или, что тоже возможно, группы стоек, включающей только часть стоек, зарегистрированных в системе 2, как это будет более понятно далее.
Удобно, что блок управления каждой стойки 4 в системе 2 согласно изобретению предусматривает возможность коммуникационного взаимодействия со всеми остальными стойками, предпочтительно в заданной последовательности и всегда с одинаковым приоритетом. Кроме того, блок управления каждой стойки 4 сконфигурирован таким образом, чтобы контролировать количество сработавших стоек 4 в соответствии с первоначальной настройкой каждой стойки системы пользователем.
Полезный эффект заключается в том, что в системе 2 в соответствии с изобретением после настройки в каждой стойке 4 количества стоек, входящих в состав подъемной системы 2, пользователь в любом порядке может выбрать, переместить и запустить стойки 4, являющиеся составной частью системы. Например, стойки 4 системы 2 могут быть выбраны, перемещены и/или запущены в последовательности, где первой срабатывает стойка 4, затем стойка 4'', затем 4'' и, наконец, 4'''', однако эти же стойки системы также могли бы быть выбраны, перемещены и/или запущены в любой другой последовательности (например, первая стойка 4'''', затем стойка 4'', затем 4 м и, наконец, 4').
Интерфейс 12 каждой стойки 4 сконфигурирован таким образом, что он не предоставляет пользователю какой-либо информации, касающейся положения стойки, на которую воздействует пользователь, как относительно других стоек, так и по отношению к поднимаемому грузу 11. Предпочтительно, чтобы в графическом интерфейсе 12 не отображалось положение стоек 4 друг относительно друга и по отношению к поднимаемому грузу 11, или, во всяком случае, указатели, предусмотренные для управления стойками 4 и их отображения, были независимыми и не привязывались к изображению каждой стойки 4 и груза 11.
Предпочтительно, чтобы устройство дисплея 13 с графическим интерфейсом 12 отображало следующие параметры:
- количество стоек 20, соединенных друг с другом и зарегистрированных как относящиеся к подъемной системе 2, и
- код 22, однозначно идентифицирующий каждую стойку и настраиваемый пользователем вручную путем непосредственного воздействия на устройство ввода графического интерфейса 12.
Предпочтительно, чтобы коды 22, однозначно идентифицирующие стойки 4 в уже созданной или вновь создаваемой подъемной системе 2, были числовыми или буквенно-числовыми и шли с последовательным нарастанием. Целесообразно, чтобы такие коды 22 располагались в упорядоченной последовательности один за другим, предпочтительно с выравниванием по горизонтали и/или по вертикали.
Предпочтительно, чтобы скриншот 19, который показан на Фиг. 6, отображаемый на устройстве дисплея 13 интерфейса 12 каждой стойки 4, включал в себя:
- индикацию 20 количества стоек, установленных пользователем в качестве составных частей подъемной системы 2,
- коды 22, однозначно идентифицирующие стойки 4 в составе подъемной системы 2, сформированные на этапе создания,
- первое число 24, показывающее фактическую высоту стойки 4, и второе число 26, показывающее максимальную высоту, которой можно достичь,
- первое графическое изображение 28, показывающее режим работы/запуска, установленный для данной стойки 4,
- второе графическое изображение 30, показывающее, является ли стойка 4 управляющей или управляемой в составе подъемной системы 2 или в составе своей рабочей группы,
- третье графическое изображение 32, при использовании сенсорного экрана указывающее на область, куда следует нажать для включения/отключения блокировки экрана,
- четвертое графическое изображение 34, показывающее, находится ли электромеханический упор 14, устойчиво фиксирующий вертикальное перемещение каретки 8 относительно вертикальной опорной конструкции 6, в положении срабатывания на всех стойках 4 подъемной системы 2,
- пятое графическое изображение 36, показывающее, что соответствующая стойка неподвижна.
Также целесообразно предусмотреть на устройстве дисплея 13 код 23, идентифицирующий ту стойку 4, на интерфейс 12 которой воздействует пользователь, соответствующий коду 22, установленному/привязанному пользователем к данной стойке.
Целесообразно также предусмотреть на устройстве дисплея 13 дополнительное графическое изображение 41, отображающее тип транспортного средства или груза 11, которое является независимым и не связано с вышеупомянутым указателем 20, а также с вышеупомянутыми кодами 22 как графически, так и информационно. Предпочтительно, чтобы это графическое изображение 41 было реализовано таким образом, чтобы отображать только количество рабочих зон для подъема необходимых для данного типа груза. В частности, в случае транспортного средства графическое изображение 41 содержит информацию о количестве осей такого транспортного средства.
Удобно, когда устройство дисплея 13 имеет отдельный скриншот 19, включающий в себя:
- первую часть 43, в пределах которой последовательно отображаются уникальные идентификационные коды 22, причем каждый из них соответствует стойке 4 подъемной системы 2, при этом они выровнены по вертикали и/или по горизонтали и привязаны пользователем вручную путем воздействия на устройство ввода графического интерфейса 12, и
- вторую часть 45, в пределах которой отображается графическое изображение 41 поднимаемого груза 11; при этом вторая часть 45 выполнена как отдельная, независимая и несвязанная с первой частью 43 как графически, так и информационно.
Целесообразно предусмотреть на устройстве дисплея 13 дополнительные символы 38, 40 и 42 для обозначения используемого языка, уровня заряда батареи стойки 4 и наличия сигнала Wi-Fi для подключения стоек друг к другу, соответственно.
Удобно, когда включенное или отключенное состояние каждого указателя и/или графического изображения, с помощью которого он отображается на экране, может быть задано с помощью соответствующих символов и/или различных цветов.
Предпочтительно, чтобы включенное или отключенное состояние кодов 22 позволяло пользователю получать информацию о количестве стоек, уже связанных между собой для формирования подъемной системы 2, и/или о количестве стоек, которые еще необходимо присоединить к другим, чтобы завершить формирование такой системы.
Удобно, когда пользователь может нажать на монитор 13 сенсорного экрана при наличии различных указателей и/или графических изображений или воздействовать на клавиатуру или на другое подходящее устройство ввода, связанное со стойкой 4, для взаимодействия с интерфейсом 12 стойки 4 и отправить входные сигналы управления с целью изменения состояния самой стойки.
Целесообразно, чтобы программное обеспечение блока управления каждой стойки 4 было сконфигурировано таким образом, что, когда пользователь воздействует на интерфейс 12 стойки (например, путем клика на второе графическое изображение 30), для того чтобы установить ей статус управляющей стойки в подъемной системе 2, другие стойки системы автоматически становились управляемыми стойками.
Удобно, что стойки 4 системы 2 всегда включены в коммуникационное взаимодействие друг с другом, однако, как только будет установлена управляющая стойка, программное обеспечение блока управления каждой стойки 4 будет сконфигурировано таким образом, что только управляющая стойка сможет посылать активные сигналы управления другим стойкам.
Как видно из Фиг. 6, 8, 9 и 13, скриншот 19, отображаемый на экране 13 интерфейса 12, не содержит какого-либо графического изображения, указывающего/предоставляющего информацию о положении той стойки 4, на которую воздействует пользователь, по отношению к транспортному средству 11 и/или по отношению к другим стойкам системы 2.
Первое графическое изображение 28 на скриншоте 19, то есть изображение, указывающее на режим работы/запуска, установленный для данной стойки 4, может содержать один из символов, изображенных на Фиг. 7, а в частности:
- первый символ 44 для установки/индикации среди стоек, входящих в состав подъемной системы 2, группы, состоящей из отдельной стойки, на которую воздействует пользователь,
- второй символ 46 для установки/индикации среди стоек, входящих в состав подъемной системы 2, группы, состоящей только из двух стоек, в частности той, на которую воздействует пользователь, и любой другой стойки, являющейся составной частью системы 2,
- третий символ 48 для установки/индикации рабочего режима, когда активны все четыре стойки подъемной системы 2.
После того как подъемная система 2 была создана и настроена, у пользователя может возникнуть необходимость создать группу, состоящую только из одной или двух стоек 4, выбранных среди всех стоек 4, входящих в состав системы 2.
Для этого пользователь физически последовательно подходит к каждой стойке 4 создаваемой группы, чтобы затем воздействовать на соответствующий пользовательский интерфейс 12.
В частности, чтобы настроить систему на одновременное срабатывание группы, состоящей только из двух стоек 4', 4'', выбранных из четырех, входящих в состав системы 2, пользователь действует следующим образом:
- подходит к первой стойке 4' и воздействует на интерфейс 12' (см. Фиг. 8), для начала кликнув на графическое изображение 28' скриншота 19', для того чтобы отобразить символ 46' и таким образом установить рабочий режим на стойке 4', в котором срабатывает только одна группа, состоящая из двух стоек; затем путем клика на графическое изображение 30' скриншота 19' пользователь настраивает первую стойку 4' как управляемую стойку в данной группе,
- затем подходит к стойке 4'' и воздействует на интерфейс 12'' (см. Фиг. 9), для начала кликнув на графическое изображение 28'' скриншота 19'', для того чтобы отобразить символ 46' и таким образом установить рабочий режим на стойке 4'', в котором срабатывает только одна группа, состоящая из двух стоек; затем путем клика на графическое изображение 30'' скриншота 19'' пользователь настраивает первую стойку 4'' как управляющую стойку в данной группе.
Как видно из сравнения Фиг. 8 и 9, удобно, чтобы графическое изображение 30', идентифицирующее управляемую стойку, отличалось, например, по цвету от графического изображения 30'', идентифицирующего управляющую стойку.
Подразумевается, что этот этап настройки может быть выполнен пользователем, который в первую очередь воздействует на стойку 4', выбранную в качестве управляемой стойки, а затем воздействует на стойку 4'', выбранную в качестве управляющей стойки для данной группы, или наоборот.
После того как выполнена такая настройка группы, пользователь переходит к интерфейсу 12'' управляющей стойки 4'', чтобы сформировать команду на одновременное перемещение соответствующих подъемных кареток 8' и 8'' стоек 4', 4'' для группы, заданной таким образом.
Если стойки 4', 4'' созданной группы выровнены в поперечном направлении относительно транспортного средства 11, то приведение их в действие позволяет поднять транспортное средство в месте расположения их оси, например, для выполнения операций по техническому обслуживанию.
Если вместо этого стойки 4', 4'' заданной группы расположены на одной стороне транспортного средства 11, то приведение их в действие позволяет наклонить транспортное средство вбок, например, чтобы опорожнить бак, установленный на борту.
Удобно, что в соответствии с вариантом осуществления, изображенным на Фиг. 11-13, подъемная система 2 состоит из трех передвижных стоек 4, однако она могла бы содержать любое другое нечетное количество передвижных стоек 4 (т.е. пять, семь и т.д.), это также относится и к подъемному блоку, выделенному в составе такой системы. В частности, в таком случае все передвижные стойки 4 удобно расположить вокруг центра поднимаемого груза 11. Полезный эффект заключается в том, что подъемная система 2 или подъемный блок с нечетным количеством передвижных стоек 4 могут быть созданы/установлены в результате того, что после регистрации каждой стойки 4 как относящейся к системе 2 она взаимодействует со всеми остальными стойками 4, зарегистрированными в этой системе. В частности, подъемная система 2 в варианте осуществления изобретения, представленном на Фиг. 11-13, устанавливается и управляется по такому же способу, который раскрыт выше применительно к другим вариантам осуществления изобретения. Кроме того, как показано на Фиг. 4, скриншот 19 с устройства дисплея 13 графического интерфейса 12 каждой стойки 4 подъемной системы 2, состоящей из нечетного количества передвижных стоек 4, имеет такие же существенные признаки и преимущества, что описаны выше применительно к другим вариантам осуществления изобретения.
Удобно, что подъемная система согласно изобретению может состоять их двух или более передвижных стоек 4, устанавливаемых вокруг поднимаемого груза 11 таким образом, что они не обязательно размещаются одна напротив другой, в том смысле, что они могут располагаться в рабочих зонах, предусмотренных для подъема груза 11, не являющихся взаимно противоположными по отношению к опорной оси, пересекающей сам груз.
Кроме того, система 2 в соответствии с изобретением настраивается в процессе эксплуатации для осуществления управления, отображения и регулировки вертикального выравнивания подъемных кареток 8 на стойках 4 системы 2 или рабочей группы.
В частности, каждая стойка 4 снабжена механизмом определения высоты расположения каждой подъемной каретки 8, и, кроме того, блок управления и обработки информации каждой стойки 4 выполнен с возможностью принимать информацию о высоте, измеренной указанным механизмом, и сравнивать, насколько она соответствует высоте расположения подъемных кареток 8, находящихся в работе на других стойках 4, или насколько она находится в пределах заданного допустимого диапазона по высоте.
Кроме того, если будет обнаружено, что подъемные каретки 8 одной или нескольких стоек 4 смещены по высоте относительно остальных стоек, блок управления и обработки информации предусматривает возможность заблокировать перемещение подъемных кареток 8 всех остальных стоек и отобразить соответствующий предупреждающий сигнал для пользователя на устройстве дисплея 13 интерфейса 12. Предпочтительно, чтобы такой предупреждающий сигнал отображался на устройстве дисплея 13 управляющей стойки, на которую воздействует пользователь, и указывал также, на какой стойке подъемная каретка 9 смещена по высоте относительно остальных стоек.
Поэтому при появлении такого предупреждения пользователь подходит к стойке со смещенной кареткой 8 и воздействует на интерфейс 12 таким образом, чтобы отобразить скриншот 50 на соответствующем устройстве дисплея 13, где показана высота расположения всех кареток 8 стоек 4 системы/группы.
Если говорить более подробно, скриншот 50 содержит:
- графические символы 52', 52'', 52''', 52'''', например, в виде точек, каждый из которых представляет собой подъемные каретки 8 стоек 4 подъемной системы 2,
- линию 53, показывающую плоскость выравнивания подъемных кареток 8 для стоек системы,
- две зоны 54 и 56, представляющие собой зону недопустимого смещения и зону допустимого смещения, соответственно, для выравнивания кареток на стойках.
Например, на скриншоте 50, где показано выравнивание (см. Фиг. 10), видно, что первая точка 52', соответствующая каретке 8 первой стойки 4' рабочей системы, смещена относительно линии 53, соединяющей три точки 52'', 52''', 52'''', соответствующие кареткам 8 трех других стоек 4, и находится в зоне 54 недопустимого смещения.
Воздействуя на интерфейс 12 стойки со смещенной кареткой, пользователь формирует команду на вертикальное перемещение каретки данной стойки, чтобы обеспечить ее вертикальное выравнивание относительно других кареток, которые в это время остаются неподвижными.
Полезный эффект заключается в том, что во время этапа автоматического выравнивания пользователь может отображать и отслеживать в реальном времени этап автоматического выравнивания подъемной каретки 8, при этом наблюдая, как точка 52', которая представляет смещенную каретку, перемещается на скриншоте 50, отображающем выравнивание, чтобы в результате достичь выравнивания с другими точками, которыми обозначены каретки 8, уже выровненные между собой.
Из вышеприведенного описания очевидно, что способ, передвижная стойка и подъемная система в соответствии с изобретением обладают большими преимуществами в сравнении с традиционными, поскольку:
- последовательность расположения или перестановки стоек вокруг груза или транспортного средства является абсолютно случайной и свободной, это обеспечивается за счет того, что на этапе регистрации стоек в системе не устанавливают и не определяют какого-либо взаимного расположения стоек друг относительно друга и по отношению к транспортному средству,
- изобретение позволяет задавать подъемную систему или подъемный блок, состоящий из нечетного числа стоек,
- изобретение позволяет настраивать в зависимости от потребностей подъемные подгруппы, состоящие из любых двух стоек, рабочую ось которых выбирает пользователь исходя из удобства,
- изобретение позволяет контролировать состояние выравнивания стоек и в случае смещения одной из них выполнить их автоматическое повторное выравнивание, а также предоставляет возможность пользователю визуально контролировать выполнение этой операции.
Реферат
Изобретения относятся к способу управления системой подъема грузов и системе подъема грузов, предпочтительно автотранспортных средств (11). Система содержит по меньшей мере две передвижные стойки (4), приводимые в действие одновременно. Способ включает в себя следующие этапы: пользователь поочередно в любом порядке подходит к каждой стойке (4), которую необходимо зарегистрировать как относящуюся к данной системе и которая срабатывает по меньшей мере по одной команде запуска, предусмотренной в соответствующем пользовательском интерфейсе каждой из стоек (4), предназначенном для регистрации указанных стоек как относящихся к данной подъемной системе без установки и определения какого-либо взаимного расположения стоек и их рабочих положений относительно поднимаемого груза (11), а также последовательности их расположения относительно поднимаемого груза (11), при этом пользовательский интерфейс каждой из стоек (4) реализован таким образом, что он не предоставляет пользователю какой-либо информации, касающейся положения стойки, на которую воздействует пользователь, относительно других стоек и груза (11). Затем пользователь физически в любом порядке перемещает каждую зарегистрированную стойку (4), чтобы расположить ее в любой из рабочих областей или в любом положении, которые предусмотрены для подъема указанного груза (11). Далее пользователь подходит к одной из зарегистрированных стоек (4) и путем воздействия на пользовательский интерфейс указанной стойки присваивает данной стойке функцию управляющей стойки по отношению к другим стойкам данной подъемной системы, формирует команду путем воздействия на пользовательский интерфейс управляющей стойки для одновременного подъема/опускания одной и/или всех стоек подъемной системы. Изобретения обеспечивают улучшение процесса подъема груза. 3 н. и 13 з.п. ф-лы, 13 ил.
Комментарии