Самотормозящийся винтовой домкрат с аксиальным электродвигателем - RU2702475C1
Код документа: RU2702475C1
Чертежи

Описание
Изобретение относится к винтовым домкратам и служит для поднятия и опускания грузов с автоматической остановкой и фиксацией положения после отключения питающего напряжения.
Известна конструкция винтового домкрата, приводимого в действие электродвигателем (АС №44325, 1935 г.).
На полом цилиндрическом корпусе домкрата, усиленном радиальными кронштейнами, установлен электродвигатель, полый вал которого вращается на шарикоподшипниках. В верхней расширенной части вала вварена (или закреплена иным способом) гайка грузового винта, пропущенного внутри полого вала. Винт имеет сверху не вращающуюся головку для принятия нагрузки, внизу корпуса расположено колесо для удобства транспортировки.
Согласно изобретению, грузовой винт домкрата получает движение непосредственно от вала электродвигателя, расположенного в самом корпусе домкрата, причем, вал этот сделан полым, и винт проходит внутри него, а гайка винта соединена с ним или составляет одно целое с валом.
Недостатком данной конструкции является то, что домкрат не имеет возможности уменьшения времени остановки приводного электродвигателя после отключения обмотки возбуждения от источника питания, что сказывается на точности позиционирования винта домкрата.
Помимо этого, в конструкции отсутствует возможность фиксации положения поднимаемого или опускаемого груза после отключения питания приводного электродвигателя.
Кроме этого, цилиндрическая конструкция приводного электродвигателя имеет осевую длину, которая дополнительно увеличивает высоту домкрата и ограничивает возможность поднятия и опускания груза на малой высоте, т.е. сужает высотные пределы работы домкрата.
Так же, в винтовом домкрате применяется приводной электродвигатель с цилиндрической расточкой статора и ротора. Для увеличения массы поднимаемого или опускаемого груза в данной конструкции необходимо увеличить крутящий момент на его валу. Это можно реализовать путем увеличения мощности приводного электродвигателя, и увеличения его радиальных размеров (увеличение радиуса цилиндрической расточки ротора и статора), что неизбежно приведет к перерасходу активных материалов и повышению его себестоимости.
Важно отметить, что в данной конструкции имеется механическая передача гайка-винт, которая имеет малую величину передаточного числа и имеет ограничения к ее увеличению. Это ведет к тому, что при установленной мощности приводного электродвигателя имеется ограничение к увеличению крутящего момента действующего на гайку, что уменьшает грузоподъемность домкрата и ограничивает сферу его применения. Все это в целом, ведет к сужению сферы применения домкратов данной конструкции.
Наиболее близким по технической сущности к заявленному изобретению является самотормозящийся винтовой домкрат с аксиальным электродвигателем (патент РФ №2601996, опубликован 10.11.2016 г., бюл. №31).
Самотормозящийся винтовой домкрат с аксиальным электродвигателем, содержащий электродвигатель, корпус которого соединен с полой цилиндрической стойкой, усиленной радиальными кронштейнами, винт с не вращающейся головкой, гайку, подшипники. Электродвигатель выполнен аксиальным, асинхронным, одностаторным, однороторным, его корпус состоит из верхнего и нижнего несущих щитов, закрепленных неподвижно между собой, с внутренней торцевой стороны нижнего несущего щита закреплен магнитопровод статора с обмоткой возбуждения, а ротор состоит из магнитопровода ротора с короткозамкнутой обмоткой и основания, соединенных неподвижно между собой и образующих кольцевой диск, основание которого посредством шлицевого соединения сопрягается с гайкой, с возможностью аксиального перемещения между внутренней торцевой поверхностью уступа и внутренней торцевой поверхностью тормозной накладки, при этом, уступ выполнен на нижней части гайки, его диаметр имеет увеличенное значение по отношению к диаметру шлицевого соединения, а тормозная накладка неподвижно закреплена на тормозном диске, неподвижно установленном с внутренней торцевой стороны верхнего несущего щита; вышеуказанная гайка соединена с винтом посредством резьбового соединения и расположена в верхнем и нижнем несущих щитах при помощи радиально-упорных подшипников, а уступ на ней выполнен с учетом того, чтобы в собранной конструкции, при отсутствии питания на обмотке возбуждения магнитопровода статора, расстояние между магнитопроводами статора и ротора было равно суммарной величине рабочего воздушного зазора и аксиального перемещения диска ротора вдоль шлицевого соединения; на внешней части уступа установлена тормозная пружина, расположенная между нижней торцевой стороной основания диска ротора и буртом, выполненным на нижней части уступа, одновременно, верхний и нижний несущие щиты образуют сборную конструкцию, в которой внутренняя кольцевая полость электродвигателя базируется на цилиндрической полой стойке, усиленной радиальными кронштейнами.
При подключении переменного синусоидального напряжения на обмотку возбуждения, под воздействием аксиального электромагнитного усилия кольцевой диск ротора совершает аксиальное смещение по шлицевому соединению вдоль гайки, отходя от тормозного устройства с образованием рабочего зазора. Так как, гайка связана с винтом посредством резьбового соединения, то вращающий момент гайки будет передаваться грузовому винту, который будет поднимать или опускать груз.
Достоинствами данной конструкции являются: увеличенная грузоподъемность домкрата (по сравнению с цилиндрической конструкцией приводного электродвигателя) при сопоставимой мощности электродвигателя; возможность автоматической остановки и фиксации положения винта при отключении питающего напряжения на обмотку возбуждения; возможность работы домкрата на высоте, соизмеримой с высотой сборного корпуса электродвигателя, что дополнительно расширяет высотные пределы работы домкрата.
Недостатком данного изобретения является то, что в данной конструкции имеется механическая передача гайка-винт, которая имеет малую величину передаточного числа и имеет ограничения к ее увеличению. Это ведет к тому, что при установленной мощности приводного электродвигателя имеется ограничение к увеличению крутящего момента, действующего на гайку, что уменьшает грузоподъемность домкрата при пуске (особенно актуально при поднятии груза) с ограничением функциональных возможностей и сферы его применения.
Помимо этого при отключении питания от электродвигателя происходит переходный процесс, в результате которого происходит гашение электромагнитного поля, с последующим торможением и фиксацией положения груза. Дополнительным недостатком является то, что в прототипе отсутствует возможность дополнительного уменьшения времени переходного процесса, которое уменьшает точность позиционирования с ограничением функциональных возможностей и сферы его применения.
Задачей изобретения является усовершенствование винтового домкрата позволяющее расширить сферу его применения и функциональные возможности при работе на высоте, соизмеримой с высотой сборного корпуса электродвигателя.
Технический результат заключается в возможности увеличения грузоподъемности домкрата и повышение точности позиционирования за счет возможности изменения величины сопротивления в цепи ротора.
Технический результат достигается тем, что самотормозящийся винтовой домкрат с аксиальным электродвигателем, содержит электродвигатель, выполненный аксиальным, асинхронным, одностаторным, однороторным, его корпус состоит из верхнего и нижнего несущих щитов, закрепленных неподвижно между собой, с внутренней торцевой стороны нижнего несущего щита закреплен магнитопровод статора с обмоткой возбуждения, а ротор состоит из магнитопровода ротора с обмоткой и основания, соединенных неподвижно между собой и образующих кольцевой диск, основание которого посредством шлицевого соединения сопрягается с гайкой, с возможностью аксиального перемещения между внутренней торцевой поверхностью уступа и внутренней торцевой поверхностью тормозной накладки, при этом, уступ выполнен на нижней части гайки, его диаметр имеет увеличенное значение по отношению к диаметру шлицевого соединения, а тормозная накладка неподвижно закреплена на тормозном диске, неподвижно установленном с внутренней торцевой стороны верхнего несущего щита, вышеуказанная гайка соединена с винтом посредством резьбового соединения и расположена в верхнем и нижнем несущих щитах при помощи радиально-упорных подшипников, а уступ на ней выполнен с учетом того, чтобы в собранной конструкции, при отсутствии питания на обмотке возбуждения магнитопровода статора, расстояние между магнитопроводами статора и ротора было равно суммарной величине рабочего воздушного зазора и аксиального перемещения диска ротора вдоль шлицевого соединения, на внешней части уступа установлена тормозная пружина, расположенная между нижней торцевой стороной основания диска ротора и буртом, выполненным на нижней части уступа, одновременно, верхний и нижний несущие щиты образуют сборную конструкцию, в которой кольцевая полость электродвигателя базируется на цилиндрической полой стойке, усиленной радиальными кронштейнами, при этом обмотка ротора выполнена фазной, концы фаз которой соединены с дополнительно установленными контактными кольцами, расположенными на внешней боковой поверхности ротора на одном уровне с щетками с щеткодержателем, который неподвижно закреплен на внешней боковой стороне верхнего несущего щита, причем толщина контактных колец, расположенных на роторе, изготовлена с учетом аксиального перемещения контактных колец с диском ротора относительно щеток вдоль шлицевого соединения с возможностью подключения каждой фазы обмотки через контактные кольца, щетки на добавочные активные сопротивления с последующим соединением их в электрический узел.
Увеличение грузоподъемности домкрата, во время пуска, происходит за счет того, что в цепь ротора через щетки и контактные кольца имеется возможность подключения добавочных активных сопротивлений, которые ведут к увеличению полного сопротивления в цепи ротора (Проектирование электрических машин: Учеб. для вузов. - В 2-х кн.: кн. 1/ И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б.Ф. Токарев; Под ред. И.П. Копылова. - 2-е изд., перераб. и доп.- М.: Энергоатомиздат, 1993. - 464 с).
В результате этого уменьшается пусковой ток, увеличивается активная составляющая тока ротора и, как следствие - пусковой момент двигателя, действующего на гайку домкрата.
Пусковой ток приводного электродвигателя домкрата определяется по формуле (1):

где U1 - входное напряжение;
r1 - активное сопротивление ротора;

x1 - реактивное сопротивление статора;

Пусковой момент приводного электродвигателя домкрата определяется по формуле (2)

где р - количество пар полюсов аксиального электродвигателя;
m1 - число фаз в обмотке статора;
f - частота питаемой сети;
r1 - активное сопротивление ротора;


При отключении обмотки возбуждения электродвигателя от питающего напряжения переходная функция намагничивающего тока расчитывается по формуле (3) (Попов С.А., Энговатов А.В., Нечесов В.Е., «Уменьшение времени торможения самотормозящихся асинхронных двигателе» Технические и технологические системы: материалы V Междунар. Науч.-практ.конф. (10-11 октября 2013 г.)/ КубГАУ. -Краснодар, 2013. - С. 315, стр. 225-229):

где r2 - активное сопротивление ротора;
L2 - индукция в цепи ротора; Е - ЭДС, наводимая обмоткой ротора;
i2 - ток ротора; δ - коэффициент затухания, который определяется по формуле (4):

где r2 - активное сопротивление ротора;

L2 - индукция в цепи ротора. Из соотношений видно, что с увеличением величины добавочного активного сопротивления коэффициент затухания контура

Предлагаемая конструкция в итоге расширяет функциональные возможности домкрата и позволит расширить сферу его применения.
Сущность изобретения поясняется чертежами.
На фиг. 1 показан общий вид самотормозящегося винтового домкрата с аксиальным электродвигателем.
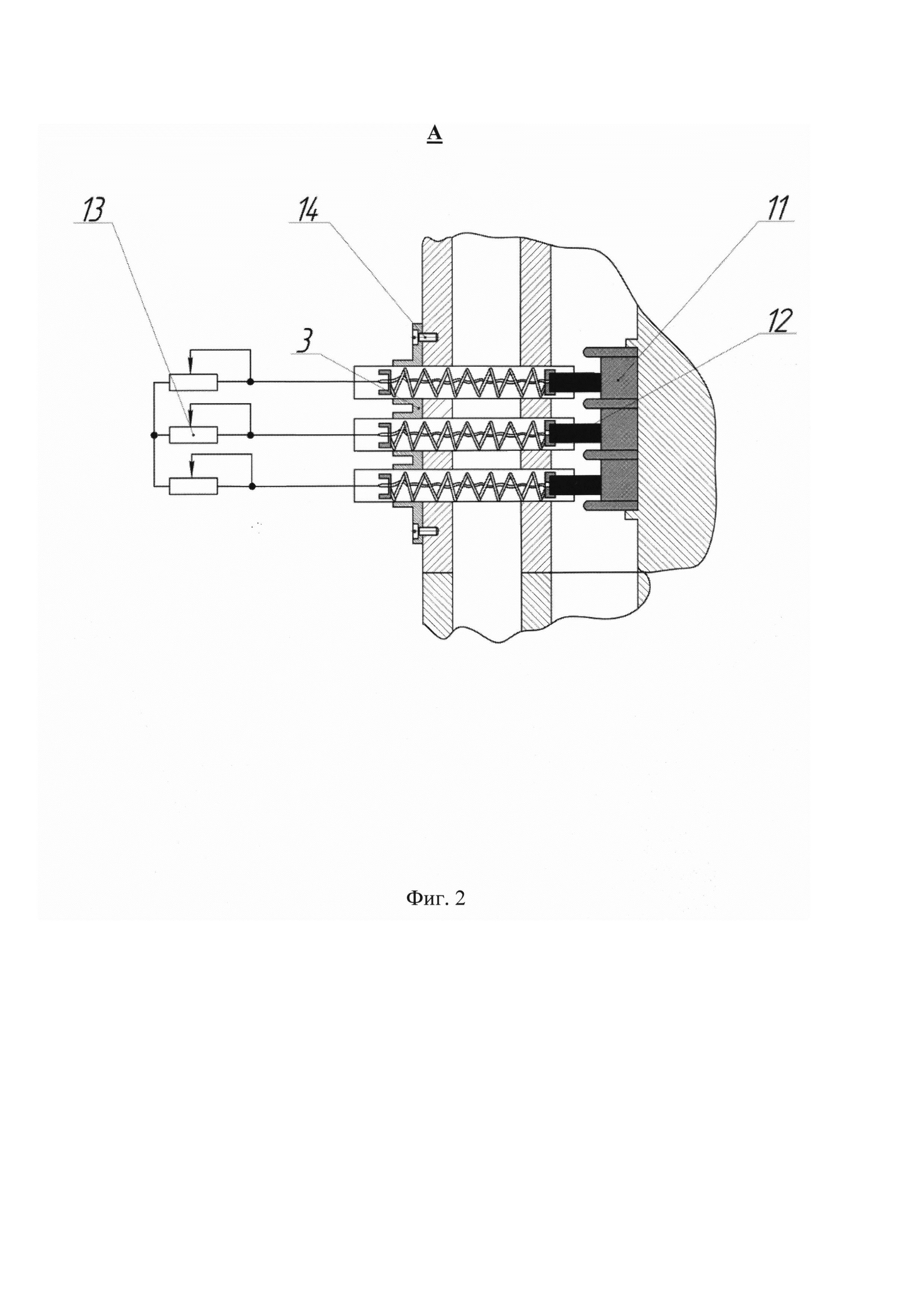
На фиг. 2 показан щеточный механизм самотормозящегося винтового домкрата с аксиальным электродвигателем с схемой подключения добавочных активных сопротивлений в цепь ротора.
Устройство содержит электродвигатель, сборный корпус, который состоит из нижнего несущего щита 1 и верхнего несущего щита 2 на боковой поверхности которого расположен щеткодержатель 3. Нижний несущий щит 1 и верхний несущий щит 2 закреплены неподвижно между собой и образуют кольцевую полость 4 электродвигателя посредством болтового соединения 5.
Электродвигатель выполнен в виде асинхронного одностаторного однороторного аксиального электродвигателя, магнитопровод статора 6 с обмоткой возбуждения 7 жестко закреплен с внутренней торцевой стороны нижнего несущего щита 1, а магнитопровод ротора 8 с фазной обмоткой 9 образует с основанием ротора 10 кольцевой диск. При этом концы фаз обмотки магнитопровода ротора 8 выведены на контактные кольца 11 через щетки 12 к добавочным активным сопротивлениям 13 с последующим соединением их в одну точку. Щетки 12 расположены в щеткодержателе 3, который закреплен на боковой стороне верхнего несущего щита 2 болтовым соединением 14. При этом щетки 12 выполнены с учетом аксиального перемещения по контактным кольцам 11.
Основание ротора 10 сопряжено с гайкой 15 посредством шлицевого соединения 16. Уступ 17 выполнен в нижней части гайки 15, при этом внешний диаметр уступа 17 имеет увеличенное значение по отношению к внешнему диаметру шлицевого соединения 16.
С внутренней торцевой стороны верхнего несущего щита 2 неподвижно установлен тормозной диск 18 тормозного устройства, на котором жестко закреплена тормозная накладка 19. Кольцевой диск ротора расположен между уступом 17 и тормозной накладкой 19 и имеет возможность аксиального перемещения по шлицевому соединению 16 между внутренней торцевой поверхностью 20 уступа 17 и тормозной накладкой 19.
Гайка 15 позиционируется в нижнем несущем щите 1 и верхнем несущем щите 2 при помощи радиально-упорных подшипников 21, 22. На внешней части уступа 17 установлена тормозная пружина 23, расположенная между нижней торцевой стороной основания 10 кольцевого диска ротора и буртом 24, выполненным в нижней части уступа 17. Тормозная пружина 23 опираясь на бурт 24, при отсутствии питания на обмотке возбуждения 7 магнитопровода статора 6, прижимает кольцевой диск ротора к тормозной накладке 19 и тем самым предотвращает вращение кольцевого диска ротора и сопряженной с ним посредством шлицевого соединения 16 гайки 15. При этом уступ 17 на гайке 15 изготовлен с учетом того, чтобы в собранной конструкции, при отсутствии питания на обмотке возбуждения 7 магнитопровода статора 6, аксиальное расстояние между магнитопроводом статора 6 и магнитопроводом ротора 8 было равно суммарной величине рабочего воздушного зазора 8 и аксиального перемещения Δ кольцевого диска ротора вдоль шлицевого соединения 16.
Винт 25 сопряжен с внутренней полостью гайки 15 посредством резьбового соединения 26. В верхней части винта 25 изготовлена головка 27 для принятия нагрузки.
Нижний несущий щит 1 и верхний несущий щит 2 образуют сборную конструкцию, в которой кольцевая полость 4 электродвигателя расположена на площадке 28 жестко связанной с цилиндрической полой стойкой 29 и радиальными кронштейнами 30 и присоединена при помощи винтов 31. Радиальные кронштейны 30 усиливают как цилиндрическую полую стойку 29, так и площадку 28.
Работает домкрат следующим образом.
В качестве источника питания домкрата может служить как источник синусоидального напряжения промышленной частоты, так и частотно-регулируемый источник (целесообразен при необходимости регулирования скорости подъема или опускания груза и использовании винта 25 малой высоты).
При подключении переменного синусоидального напряжения на обмотку возбуждения 7 магнитопровода статора 6, расположенном в нижнем несущем щите 1, возникает пусковой ток, превышающий номинальный ток рабочего режима машины, вследствие чего возникает электромагнитное поле, под воздействием аксиального электромагнитного усилия которого кольцевой диск ротора с находящимся там магнитопроводом ротора 8 и основанием ротора 10 совершает аксиальное смещение по шлицевому соединению 16 вдоль гайки 15 позиционирующейся в нижнем несущем щите 1 и верхнем несущем щите 2 при помощи радиально-упорных подшипников 21, 22.
Так как электромагнитное поле пересекает магнитопровод ротора 8 с фазной обмоткой 9, концы фаз которой выведены на контактные кольца 11 через щетки 12 к добавочным активным сопротивлениям 13 с последующим соединением их в одну точку, то в цепи ротора будет наводиться ЭДС и протекать электрический ток.
При этом щетки 12 расположены в щеткодержателе 3, который закреплен на боковой стороне верхнего несущего щита 2 болтовым соединением 14 и выполнены с учетом аксиального перемещения по контактным кольцам 11 при пуске и работе электродвигателя.
К щеткам 12 подключены активные добавочные сопротивления 13 с возможностью регулирования величин этих сопротивлений, что дает возможность изменения пускового момента и работы электродвигателя с перегрузом при постоянной частоте вращения.
Тормозная пружина 23 опираясь на бурт 24 получает дополнительное сжатие, а зазор Δ расположенный в кольцевой полости электродвигателя 4 между нижней торцевой стороной основания ротора 10 кольцевого диска ротора и внутренней торцевой поверхностью 20 уступа 17 уменьшается. Между тормозной накладкой 19 установленной на тормозном диске 18 и верхней торцевой поверхностью кольцевого диска ротора образуется зазор, равный величине Δ, а между аксиальными рабочими поверхностями магнитопровода статора 6 и магнитопровода ротора 8 устанавливается рабочий зазор δ, сохраняющийся в процессе вращения кольцевого диска ротора, который он получает в результате действия вращающегося магнитного поля. Так как кольцевой диск ротора сопряжен с гайкой 15 посредством шлицевого соединения 16, то момент будет вращать гайку 15 в радиально-упорных подшипниках 21, 22. При этом гайка 15 связана с винтом 25 посредством резьбового соединения 26 и при заторможенном винте 25 или нахождении груза на головке винта 27, домкрат будет поднимать или опускать винт 25.
При отключении электропитания от обмотки возбуждения 7 магнитопровода статора 6 исчезает магнитный поток, удерживающий кольцевой диск ротора в рабочем положении. Вследствие этого тормозная пружина 23 вызывает обратное аксиальное смещение его по шлицевому соединению 16 вдоль винта 25. При этом кольцевой диск ротора входит в контакт с тормозной накладкой 19, а между нижней торцевой стороной основания 10 и внутренней торцевой поверхностью 20 уступа 15 образуется зазор равный величине Δ.
В результате трения поверхностей кольцевого диска ротора и тормозной накладки 19 происходит остановка кольцевого диска ротора и сопряженной с ним посредством шлицевого соединения 16 гайки 15. Это приводит к остановке винта 25 с автоматической фиксацией его положения, что повышает безопасность эксплуатации при работе с грузами. Применение самотормозящейся конструкции состоящей из верхнего несущего щита 1, нижнего несущего щита 2 соединенных болтовым соединением 5 и расположенных на площадке 28 жестко связанной с цилиндрической полой стойкой 29 и радиальными кронштейнами 30 присоединенной при помощи винтов 31 позволяет более точно позиционировать положение винта 25 после отключения напряжения от обмотки возбуждения 7 магнитопровода статора 6. Это происходит за счет ускоренного гашения накопленной энергии (электромагнитного поля и энергии вращения диска ротора) посредством тормозного устройства и введенного в цепь ротора активных добавочных сопротивлений 13.
Реферат
Изобретение относится к винтовым домкратам и служит для поднятия и опускания грузов с автоматической остановкой и фиксацией положения после отключения питающего напряжения. Самотормозящий винтовой домкрат содержит электродвигатель, выполненный аксиальным, асинхронным, одностаторным, однороторным. Его корпус состоит из верхнего и нижнего несущих щитов, закрепленных неподвижно между собой, при этом с внутренней торцевой стороны нижнего несущего щита закреплен магнитопровод статора с обмоткой возбуждения, а ротор состоит из магнитопровода ротора с обмоткой и основания, соединенных неподвижно между собой и образующих кольцевой диск, основание которого посредством шлицевого соединения сопрягается с гайкой с возможностью аксиального перемещения между внутренней торцевой поверхностью уступа и внутренней торцевой поверхностью тормозной накладки. Уступ выполнен на нижней части гайки, его диаметр имеет увеличенное значение по отношению к диаметру шлицевого соединения, а тормозная накладка неподвижно закреплена на тормозном диске, неподвижно установленном с внутренней торцевой стороны верхнего несущего щита. Вышеуказанная гайка соединена с винтом посредством резьбового соединения. Обмотка ротора выполнена фазной, концы фаз которой соединены с контактными кольцами, расположенными на внешней боковой поверхности ротора на одном уровне с щетками с щеткодержателем, который неподвижно закреплен на внешней боковой стороне верхнего несущего щита. Толщина контактных колец, расположенных на роторе, изготовлена с учетом возможности аксиального перемещения контактных колец с диском ротора относительно щеток вдоль шлицевого соединения для передачи электрического сигнала от каждой фазы обмотки через контактные кольца и щетки на добавочные активные сопротивления с последующим соединением их в электрический узел. Технический результат заключается в возможности увеличения грузоподъемности домкрата и точности позиционирования за счет возможности изменения величины сопротивления в цепи ротора. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Самотормозящийся винтовой домкрат с аксиальным электродвигателем
Комментарии