Гидроманипулятор мобильного робота - RU2773065C1
Код документа: RU2773065C1
Чертежи







Описание
Изобретение относится к области подъемно-транспортного машиностроения, а именно к гидроманипуляторам, преимущественно размещаемым на шасси транспортных средств, в том числе на подвижных платформах мобильных дистанционно управляемых роботов.
Известен кран-манипулятор металловозный самосвального типа по патенту №2245804 РФ, который представляет собой гидравлический манипулятор антропоморфного типа, выполненный в виде поворотной стойки с шарнирно-рычажной двухзвенной стрелой с размещенным на ее конце функциональным грузозахватным органом грейферного типа, а каждый шарнир манипулятора приводится в движение посредством своих гидроприводов, а именно гидроцилиндров. Антропоморфная кинематика манипулятора обеспечивает следующие параметры изменения конфигурации кинематической цепи манипулятора: поворот стойки не менее 180°, поворот первого звена из исходного транспортного горизонтального положения в конечное вертикальное или близкое к нему при полностью выдвинутом штоке ГЦ и из горизонтального несколько вниз при опускании стрелы к земле при полностью втянутом положении штока, так что общее изменение угла между стойкой и первым звеном составляет немногим более 90°, а угол поворота второго звена относительно первого из исходного транспортного вытянутого положения в котором звенья находятся практически на одной прямой с полностью втянутым штоком соответствующего гидроцилиндра в конечное положение в котором звенья максимально согнуты и сближены между собой при максимально выдвинутом штоке составляет величину близкую к 180°. Такой угол поворота достигнут за счет использования шарнирного механизма качалка - шатун, который устроен так, что гидроцилиндр поворота второго звена шарнирно закреплен на первом звене, а его шток взаимодействует со вторым звеном через шарнирно прикрепленную к первому звену качалку и шатун, который в свою очередь шарнирно сочленен с качалкой и вторым звеном.
Поворотная стойка гидроманипулятора установлена на раме автомобильного тягача между кабиной и кузовом и поэтому имеет высоту несколько большую чем высота кузова. Сумма длин звеньев несколько больше длины кузова, причем длина первого звена L1 больше длины второго звена L2, т.е. L2 < L1. В транспортном положении гидроманипулятор вытянут горизонтально вдоль кузова, при этом грузозахватное устройство размещено сзади кузова и увеличивает тем самым общий габарит комплекса по длине и высоте за счет размещения манипулятора над кузовом и кабиной транспортного средства. В этом положении первое звено находится в исходном горизонтальном положении по отношению к вертикальной поворотной стойке под углом 90°. Такая компоновка транспортного средства с манипулятором приводит к увеличению колесной базы шасси, причем колесная база кратно превышает ширину колеи.
Известна лесозаготовительная машина по патенту ПМ 178801 РФ, содержащая самоходное транспортное шасси с кузовом позади кабины оператора и гидроманипулятор с антропоморфной кинематикой подобной манипулятору, описанному выше по патенту №2245804 РФ, в котором в качестве гидроприводов также используются гидроцилиндры. Поворотная стойка манипулятора установлена впереди кабины на раме шасси, а в транспортном положении манипулятор также размещен вдоль шасси над кабиной и кузовом транспортного шасси. Общий габарит рассмотренной лесозаготовительной машины с манипулятором также заметно превышает габариты собственно транспортного средства.
Известна валочно-пакетирующая машина по патенту №2150819 РФ, которая содержит самоходное шасси с антропоморфным гидроманипулятором с функциональным захватно-срезающим устройством на конце. Манипулятор установлен спереди на оси шасси. В транспортном положении первое звено манипулятора поднято практически вертикально вверх, а второе звено опущено вниз, при этом функциональный рабочий орган расположен перед шасси над грунтом. Очевидно, что такая кинематическая схема манипулятора и компоновка машины в целом существенно увеличивает общий габариты машины и по высоте, и по длине по сравнению с транспортным шасси.
Известен также принятый за прототип гидроманипулятор антропоморфного типа по патенту №2107655 РФ, который выполнен в виде установленной на опорно-поворотном устройстве поворотной стойки с двухзвенной, шарнирно рычажной стрелой, оснащенной функциональным грузозахватным органом. Гидроманипулятор приводится в движение гидроприводами, в качестве которых применены гидроцилиндры. Кинематика манипулятора обеспечивает диапазон изменения угла между поворотной стойкой и первым звеном стрелы больше 90° для возможности наклона первого звена ниже горизонтали на угол не более 25-30°, а диапазон изменения угла между вторым и первым звеньями практически равным 180°. Длина второго звена меньше длины первого звена на величину, не меньшую сумме половин максимальных поперечных размеров поворотной стойки d и грузозахватного органа D, при этом выполняется условие - L2 ≤ L1 - d/2-D/2.
Такая кинематика манипулятора позволяет сложить его в транспортное положение, в котором первое звено наклонено вниз от горизонтали, второе звено размещается под первым с минимальным углом между ними в направлении поворотной стойки, при этом функциональный грузозахватный рабочий орган на конце второго звена, вывешенный вертикально вниз, не касается поворотной стойки, так что второе звено и грузозахватный орган находятся внутри прямоугольного треугольника, образованного вертикальными опорно-поворотным устройством с поворотной стойкой, наклоненным первым звеном стрелы в качестве гипотенузы и участком шасси в качестве второго катета. При этом манипулятор в транспортном положении имеет большую высоту и требуется большое свободное пространство над шасси для свободного выведения манипулятора из транспортного положения в рабочее, что, в свою очередь, требует увеличения длины шасси и в целом приводит к увеличению общей высоты и длины транспортного средства, при этом длина шасси так же, как и в случаях по патентам №2245804 РФ и ПМ №178801 РФ, кратно превышает его ширину, что отрицательно сказывается на его маневренности.
При создании мобильных дистанционно управляемых робототехнических комплексов с размещенным на самоходном шасси высокой проходимости манипулятором для работы в экстремальных условиях на большом удалении от пункта управления целесообразно в качестве источника энергии использовать жидкое топливо, обладающее самой высокой удельной энергоемкостью и гибридную силовую установку в составе ДВС, электрогенератора и гидравлической системы для приводов самоходного шасси и приводов гидроманипулятора. В пользу такого технического решения принимается во внимание то обстоятельство, что гидроманипулятор обладает значительно большей удельной грузоподъемностью по сравнению с электромеханическим манипулятором. При этом к самоходному шасси предъявляются высокие требования по проходимости в условиях бездорожья и необходимости маневрирования в стесненных условиях, что предполагает обязательную способность разворачиваться на месте с нулевым радиусом разворота посредством танкового разворота. Для выполнения танкового разворота на месте принято придерживаться величины отношения продольной базы шасси к поперечной, как, например, у танков, на уровне не более 1,2-1,3.
В то же время для удобства транспортировки мобильного робота к месту работы на/внутри стандартных колесных или гусеничных транспортных средствах, например, колесных грузовиках, гусеничных тягачах и/или на прицепах требуется чтобы мобильный робот имел минимально возможные габаритные размеры. А вся совокупность требований предполагает максимально возможную компактность манипулятора в транспортном положении на шасси робототехнического комплекса, так чтобы габаритные размеры робота не превышали габаритов его шасси по длине и ширине при минимально возможной высоте.
Рассмотренные выше компоновочные решения транспортного средства и транспортного положения манипулятора на нем в вытянутом положении приводят к тому, что размеры транспортного средства превышают длину манипулятора, что значительно снижает мобильность транспортного средства, так как увеличивается радиус разворота шасси, а в случае вертикальной компоновки манипулятора повышается положение центра тяжести транспортного средства и снижается его устойчивость при езде в условиях бездорожья при необходимости преодолевать подъемы «в гору» и съезды «под гору», а также езду и маневрирование на уклонах. В тоже время рассмотренные компоновки увеличивают общие габаритные размеры транспортного средства с установленным на нем манипулятором в транспортном положении. Таким образом, рассмотренные выше компоновочные решения не могут быть применены для манипуляторов мобильных дистанционно управляемых робототехнических комплексов.
Задачей предложенного изобретения является разработка кинематики антропоморфного гидроманипулятора устанавливаемого на самоходное транспортное шасси мобильного робота, которая обеспечивает максимально возможную компактность манипулятора в транспортном положении так, чтобы его элементы не выступали за пределы заданной области по ширине и длине, например, за пределы габаритов транспортного шасси мобильного дистанционно управляемого робота, при минимально возможной высоте манипулятора в транспортном положении.
Задача повышения компактности гидроманипулятора в транспортном положении решается за счет того, что в у антропоморфного манипулятора с вертикальной поворотной стойкой с поперечным размером d и шарнирно соединенной с ней двухзвенной стрелой с соответствующими длинами звеньев L1 и L2 с шарнирно установленным на конце второго звена функциональным рабочим органом с поперечным размером D обеспечивается возможность поворота первого звена относительно поворотной стойки в вертикальной плоскости на угол не менее 180°, а длина второго звена в отличие от рассмотренных выше технических решений больше длины первого звена с учетом размеров стойки и рабочего органа, так что выполняется неравенство L2 ≥ L1+D/2+d/2, которое обеспечивает условие компактной укладки манипулятора в транспортное положение, при этом в транспортном положении звенья сложены и направлены горизонтально назад от стойки, при этом функциональный рабочий орган располагается перед стойкой и направлен вертикально вниз, что обеспечивает минимально возможные длину и высоту манипулятора в транспортном положении. При этом для снижения практически до нуля опрокидывающего момента от веса подвижных частей манипулятора стойка выполнена ломанной в вертикальной плоскости так, чтобы перпендикулярная осям поворота звеньев вертикальная плоскость, в которой лежит центр тяжести подвижных частей манипулятора, проходила через ось вращения поворотной стойки. В качестве гидропривода поворота первого звена относительно стойки используется вращательный привод, выполненный на базе опорно-поворотное устройства с гидромотором, или повортно-лопастной гидромотор.
Сущность изобретения поясняется следующими рисунками и чертежами на которых для простоты не показаны подводка шлангов и другие элементы гидросистемы.
На фиг.1 показан гидроманпулятор в вытянутом положении, вид сбоку.
На фиг.2 показан гидроманпулятор в транспортном положении, вид сбоку.
На фиг.3 показан гидроманпулятор, установленный на самоходном шасси мобильного робота в транспортном положении, вид сбоку.
На фиг.4 показан вариант исполнения гидроманипулятора с приводом поворота второго звена, выполненного на базе вращательного гидропривода, в вытянутом положении, аксонометрия.
На фиг.5 показан вариант исполнения гидроманипулятора с приводом поворота второго звена выполненного на базе вращательного гидропривода в транспортном положении, аксонометрия.
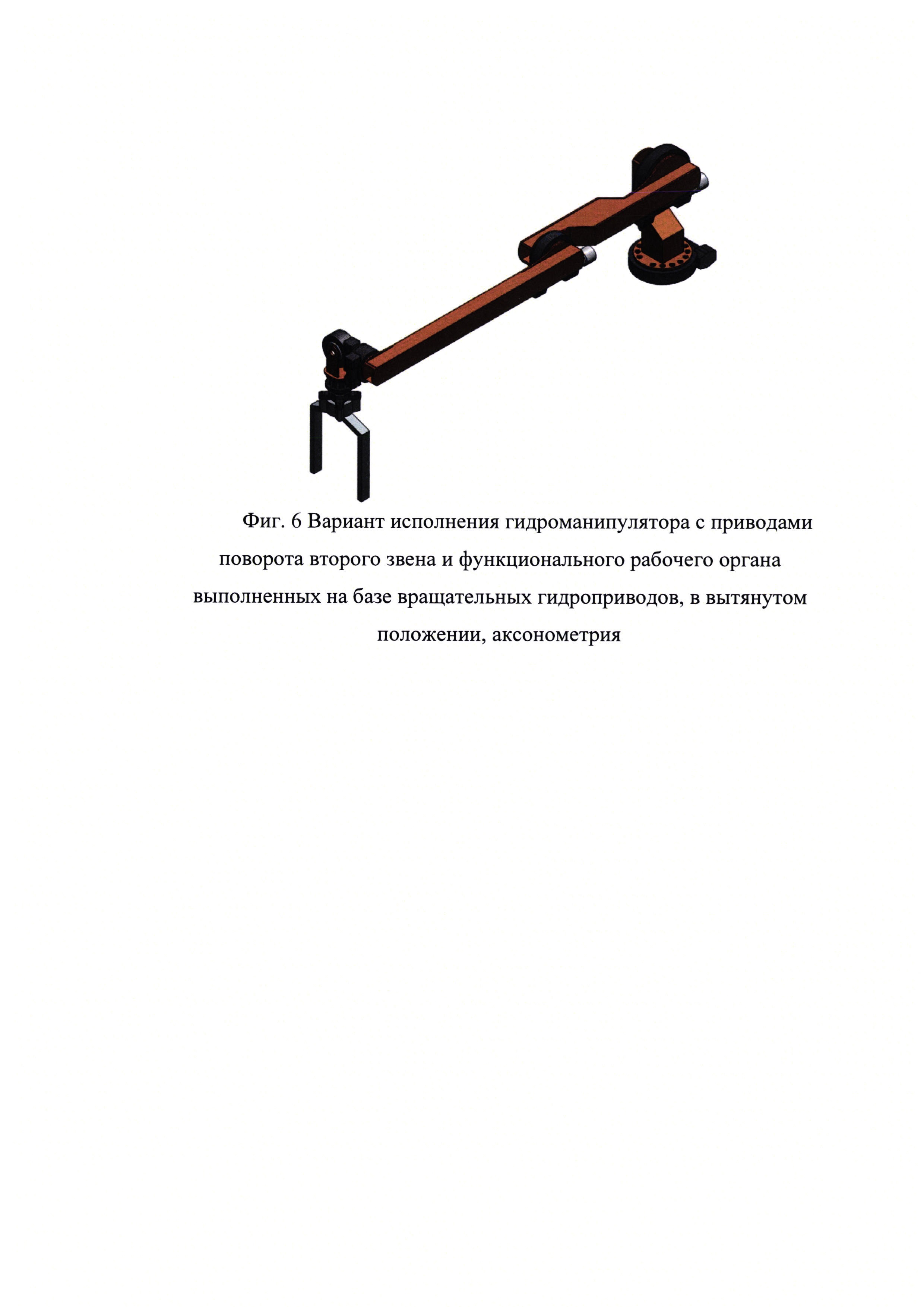
На фиг.6 показан вариант исполнения гидроманипулятора с приводами поворота второго звена и функционального рабочего органа, выполненными на базе вращательных гидроприводов, в вытянутом положении, аксонометрия.
На фиг.7 показан вариант исполнения гидроманипулятора с приводами поворота второго звена и функционального рабочего органа, выполненными на базе вращательных гидроприводов, в транспортном положении, аксонометрия.
На фиг.8 показана схема перевода гидроманипулятора из рабочего положения в транспортное и обратно.
Предложенный гидроманипулятор содержит вертикальную, имеющую размер d, поворотную стойку 1, с приводом поворота, выполненным, например, на базе вращательного гидропривода в составе опорно-поворотного устройства 2 и гидромотора 3, шарнирно соединенные со стойкой 1 и между собой первое 4 и второе 5 звенья стрелы манипулятора с длинами L1 и L2 соответственно. Поворотная стойка 1 выполнена ломанной в вертикальной плоскости так, чтобы вертикальная плоскость, перпендикулярная осям поворота звеньев, в которой лежит центр тяжести подвижных частей манипулятора, проходила через ось поворота стойки 1, что позволяет практически до нуля снизить опрокидывающий момент от веса подвижных частей манипулятора на опорно-поворотное устройство поворотной стойки.
На конце второго звена 5 шарнирно установлен функциональный рабочий орган 6 с размером D, причем шарнирные соединения выполнены посредством цилиндрических шарниров с горизонтальными осями вращения 7. Поворот первого звена 4 в вертикальной плоскости относительно поворотной стойки 1 осуществляется гидроприводом также на основе вращательного гидропривода на базе опорно-поворотного устройства 8 с гидромотором 9. Диапазон изменения этого угла поворота Q составляет не менее 180°. Подвижность элементов второго звена 5 относительно первого звена 4 осуществляется с помощью линейного гидропривода, выполненного в виде гидроцилиндра 10, закрепленного одним концом на первом звене, а вторым концом шарнирно соединенного с качалкой 11, в свою очередь, шарнирно соединенную с первым звеном и шатуном 12, второй конец которого шарнирно соединен со вторым звеном 5. Соответствующий подбор параметров гидроцилиндра, качалки и шатуна обеспечивает диапазон угла поворота второго звена Θ вплоть до 180° и приложение необходимого вращающего момента ко второму звену.
Подвижность функционального рабочего органа 6 относительно второго звена 5 также осуществляется с помощью линейного гидропривода, выполненного в виде гидроцилиндра 13, закрепленного одним концом на втором звене 5, а вторым концом шарнирно соединенного с качалкой 14, в свою очередь, шарнирно соединенную со вторым звеном и шатуном 15, второй конец которого шарнирно соединен с рабочим органом 6. Соответствующий подбор параметров гидроцилиндра, качалки и шатуна обеспечивает необходимый диапазон углов поворота Ф рабочего органа и приложение необходимого вращающего момента к рабочему органу. Функциональный рабочий орган может иметь свой привод рысканья, т.е. отклонения, например, захватного устройства грейферного типа от вертикальной плоскости. Захватное устройство может оснащаться своим приводом вращения вокруг продольной оси, выполненным, например, на базе серийно выпускаемых гидравлических ротаторов, также в зависимости от назначения и конструктивного исполнения может оснащаться одним или несколькими приводами. В качестве привода рысканья и приводов захватного устройства, например, грейферного типа могут использоваться гидроцилиндры. В тоже время для конструктивного упрощения манипулятора за счет исключения проведения гидромагистралей к рабочему органу и снижения его массы все или часть степеней подвижности ориентации и функционирования рабочего органа могут быть выполнены на базе электромеханических приводов.
В транспортном положении звенья 4, 5 сложены и расположены горизонтально под углом 90° по отношению к поворотной стойке 1, а функциональный орган располагается перед стойкой и направлен вертикально вниз, при этом выполняется неравенство L2 ≥ L1+D/2+d/2, которое обеспечивает условие компактной укладки манипулятора в транспортное положение с минимально возможными длиной А и высотой В манипулятора в транспортном положении. Из этого положения первое звено 4 может повернуться в крайнее рабочее положение на максимальный угол Ω, несколько больший чем 180°.
Возможен вариант исполнения гидроманипулятора с приводом поворота второго звена, выполненного на базе вращательного гидропривода, в качестве которого также используется опорно-поворотное устройство с гидромотором. В этом случае и первое звено выполнено ломанным в горизонтальной плоскости так, чтобы вертикальная плоскость, перпендикулярная осям поворота звеньев, в которой лежит центр тяжести подвижных частей манипулятора, проходила через ось вращения поворотной стойки.
Возможен также вариант исполнения гидроманипулятора с приводом поворота функционального органа на базе вращательного гидропривода, в качестве которого также используется опорно-поворотное устройство с гидромотором. Очевидно, что в рассматриваемых вариантах исполнения будут использованы вращательные гидроприводы с разными техническими характеристиками, такими как габаритные размеры, собственные веса, вращающие моменты и др. Подобные опорно-поворотные устройства и двигатели к ним выпускаются серийно, имеют широкие линейки образцов с разными характеристиками, широко и успешно применяются в технике, поэтому использование их в гидроманипуляторах не представляет трудностей.
Гидроманипулятор работает следующим образом. Из исходного рабочего положения, например, максимально выпрямленного рабочего положения, как показано на рисунке 8, выполняется перевод в транспортное положение за счет согласованной работы соответствующих приводов манипулятора, приводящей к изменениям углов Ω, Θ и Φ. Обратный выход манипулятора из транспортного положения в любое заданное положение, а также выполнение любых требуемых операций осуществляется за счет соответствующей работы приводов.
Реферат
Изобретение относится к области подъемно-транспортного машиностроения, а именно к гидроманипуляторам, устанавливаемых на шасси транспортных средств, в том числе на подвижных платформах мобильных дистанционно управляемых роботов. Гидроманипулятор антропоморфного типа содержит опорно-поворотное устройство, вертикальную поворотную стойку, стрелу в составе последовательно соединенных между собой первого и второго звеньев с функциональным рабочим органом на конце. Угол поворота первого звена относительно стойки не менее 180°, что реализовано вращательным приводом, например, на базе опорно-поворотного устройства с гидромотором. Длина второго звена больше длины первого, при этом в транспортном положении звенья сложены и направлены горизонтально. Обеспечивается максимально возможная компактность манипулятора в транспортном положении так, что его элементы не выступают за пределы заданной области по ширине и длине, например за пределы габаритов транспортного шасси мобильного дистанционно управляемого робота при минимально возможной высоте манипулятора в транспортном положении. 6 з.п. ф-лы, 8 ил.

Комментарии