Высокоподъемное устройство крана, система управления и способ управления им - RU2525600C2
Код документа: RU2525600C2
Чертежи
Описание
В настоящей заявке испрашивается приоритет заявки на патент КНР № 200910216804.4, озаглавленной "Высокоподъемное устройство крана, система управления и способ управления им", поданной в Государственное ведомство Китая по интеллектуальной собственности 31 декабря 2009 г. Все ее описание включено сюда в качестве ссылочного материала.
Область техники, к которой относится изобретение
Настоящее изобретение относится к области машиностроения, в частности к системе управления для высокоподъемного устройства крана. Настоящая заявка также относится к высокоподъемному устройству крана, имеющему указанную выше систему управления, и способу управления высокоподъемным устройством.
Уровень техники
При быстром развитии экономического строительства в Китае рыночный спрос на технику машиностроения, в особенности на различные краны постепенно увеличивается.
Для обеспечения большей высокоподъемности большой кран обычно имеет относительно длинную главную балку и соответственно относительно длинную вторичную подъемную балку. Между тем, составляющая сила в направлении вниз, перпендикулярном подъемной балке (то есть направлении сдвига), прилагаемая поднятым тяжелым объектом, является относительно большой, и, таким образом, отклонения подъемной балки в плоскости изменения вылета стрелы и плоскости вращения являются большими, что ухудшает состояние силы подъемной балки и, таким образом, ограничивает высокоподъемность и грузоподъемность крана.
Для решения указанных выше проблем в настоящее время в кране применяют высокоподъемное устройство, чтобы улучшить состояние силы подъемной балки, и, таким образом, улучшить высокоподъемность и грузоподъемность крана.
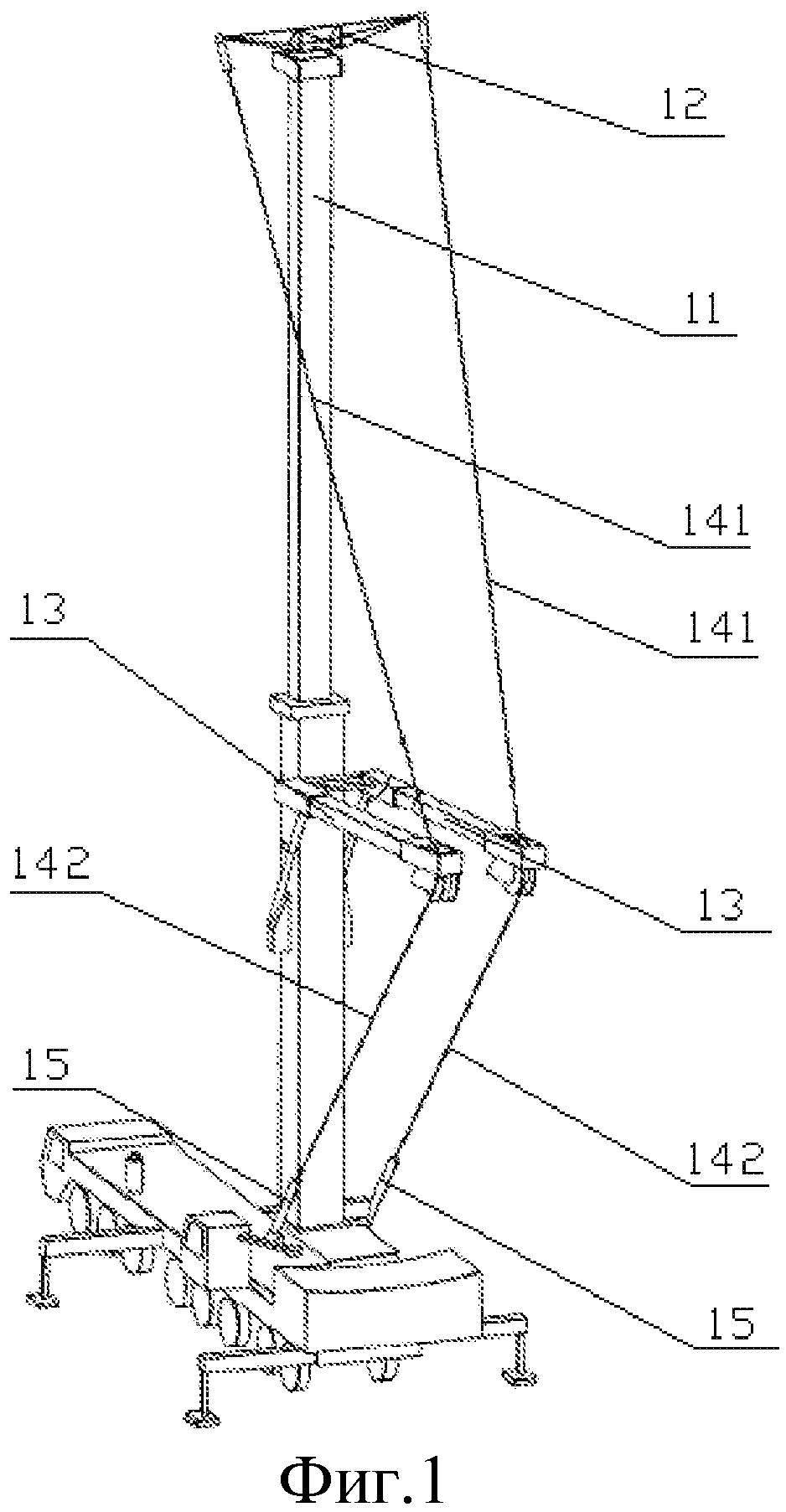
На фиг. 1 показан схематический вид конструкции типичного высокоподъемного устройства крана.
Типичное высокоподъемное устройство крана включает высокоподъемный оголовок 13 стрелы, установленный в надлежащем положении подъемной балки 11. Обычно применяют два высокоподъемных оголовка 13 стрелы, установленных соответственно на двух сторонах подъемной балки 11, и угол между двумя высокоподъемными оголовками 13 стрелы может изменяться действием гидравлических цилиндров. Узел 12 кронштейнов неподвижно установлен на оголовке подъемной балки 11. Один конец верхнего высокоподъемного проволочного каната 141 высокоподъемного устройства прикреплен к узлу 12 кронштейнов, и другой его конец прикреплен в надлежащем положении к высокоподъемному оголовку 13 стрелы. Один конец нижнего высокоподъемного проволочного каната 142 прикреплен к высокоподъемному оголовку 13 стрелы, и другой его конец прикреплен к натяжному гидравлическому цилиндру 15. Обычно применяют два натяжных гидравлических цилиндра 15, установленных, соответственно, в надлежащем положении на поворотном столе крана.
Когда подъемная балка 11 поднимается относительно поворотного стола под действием его изменяющего вылет стрелы гидравлического цилиндра, верхний высокоподъемный проволочный канат 141 и нижний высокоподъемный проволочный канат 142, в свою очередь, натягиваются и силы натяжения соответствующих проволочных канатов регулируются посредством удлинения или укорачивания натяжного гидравлического цилиндра 15, и, таким образом, высокоподъемное устройство способно обеспечивать надлежащий высокоподъемный момент для крана.
Однако в ходе работы крана момент, производимый тяжелым объектом и воздействующий на подъемную балку 11, не является постоянным. Когда момент, производимый тяжелым объектом и воздействующий на подъемную балку 11, увеличивается, высокоподъемное устройство не может автоматически распознавать изменение давления изменяющего вылет стрелы гидравлического цилиндра, что ухудшает характеристики высокоподъемности высокоподъемного устройства.
Таким образом, насущной проблемой, которую необходимо решить специалистами в данной области техники, является улучшение характеристик высокоподъемности высокоподъемного устройства.
Сущность изобретения
Целью настоящего изобретения является получение системы управления для высокоподъемного устройства крана, которая может улучшить характеристики высокоподъемности высокоподъемного устройства. Другой целью настоящего изобретения является получение высокоподъемного устройства, включающего систему управления, и способа управления высокоподъемным устройством.
Для решения указанных выше технических проблем настоящее изобретение обеспечивает получение системы управления для высокоподъемного устройства крана, включающую:
датчик давления для определения давления изменяющего вылет стрелы гидравлического цилиндра крана и получения измеренной величины давления;
управляющий элемент для сравнения измеренной величины давления с заданной величиной давления и управления натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания, если измеренная величина давления больше или равна заданной величине давления.
Предпочтительно, система управления для высокоподъемного устройства крана также включает:
датчик давления натяжения для определения давления натяжного гидравлического цилиндра и передачи сигнала давления натяжения управляющему элементу;
при этом управляющий элемент сравнивает величину давления натяжения с заданной величиной давления натяжения;
если величина давления натяжения больше или равна заданной величине давления натяжения, управляющий элемент управляет натяжным гидравлическим цилиндром для его удлинения;
и, если величина давления натяжения меньше заданной величины давления натяжения, управляющий элемент управляет натяжным гидравлическим цилиндром для его укорачивания.
Предпочтительно, система управления для высокоподъемного устройства крана также включает:
датчик длины для определения длины высокоподъемного проволочного каната высокоподъемного устройства и ввода измеренной величины длины в управляющий элемент;
при этом управляющий элемент определяет зависимость между измеренной величиной длины и диапазоном установок длины;
если измеренная величина давления меньше, чем величина заданного давления, и измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, управляющий элемент управляет натяжным гидравлическим цилиндром для его укорачивания;
и если измеренная величина давления меньше, чем величина заданного давления, и измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, управляющий элемент управляет натяжным гидравлическим цилиндром для его удлинения.
Предпочтительно, система управления для высокоподъемного устройства крана также включает:
датчик состояния для определения состояния главной балки крана и передачи полученного сигнала состояния управляющему элементу;
при этом управляющий элемент определяет состояние главной балки в соответствии с заданной стратегией;
и, если главная балка находится в состоянии изменения вылета стрелы, управляющий элемент контролирует датчик давления для определения давления изменяющего вылет стрелы гидравлического цилиндра.
Предпочтительно, датчик состояния представляет собой датчик угла, установленный между главной балкой и поворотным столом крана.
Настоящая заявка также предлагает высокоподъемное устройство крана, включающее любую из указанных выше систем управления.
Настоящая заявка также предлагает способ управления для высокоподъемного устройства крана, включающий следующие этапы:
11) определение давления изменяющего вылет стрелы гидравлического цилиндра крана и получение измеренной величины давления;
12) сравнение измеренной величины давления с заданной величиной давления и, если измеренная величина давления больше или равна заданной величине давления, переход к этапу 13);
13) управление натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания.
Кроме того, следующие этапы могут быть включены после этапа 13):
14) определение давления натяжного гидравлического цилиндра и передача сигнала давления натяжения управляющему элементу;
15) сравнение определенной величины давления натяжения с заданной величиной давления натяжения и, если определенная величина давления натяжения больше или равна заданной величине давления натяжения, переход к этапу 16); если определенная величина давления натяжения меньше, чем заданная величина давления натяжения, переход к этапу 17);
16) управление натяжным гидравлическим цилиндром для его удлинения;
17) управление натяжным гидравлическим цилиндром для его укорачивания.
Кроме того, в ходе этапа 12), когда измеренная величина давления меньше, чем величина заданного давления, процесс переходит к этапу 18) и выполняет следующие операции:
18) обнаружения длины высокоподъемного проволочного каната высокоподъемного устройства и передачи измеренной величины длины управляющему элементу;
19) определения зависимости между измеренной величиной длины и диапазоном установок длины и, если измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, переход к этапу 110); если измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, переход к этапу 111);
110) управления натяжным гидравлическим цилиндром для его укорачивания;
111) управления натяжным гидравлическим цилиндром для его удлинения.
Кроме того, следующие этапы могут быть включены перед этапом 11):
01) распознавание состояния главной балки крана и получение сигнала состояния;
02) определение состояния главной балки и, если главная балка находится в состоянии изменения вылета стрелы, переход к этапу 11); в противном случае, возвращение к этапу 01).
Система управления для высокоподъемного устройства крана согласно настоящему изобретению включает датчик давления и управляющий элемент. Датчик давления используется для контроля давления изменяющего вылет стрелы гидравлического цилиндра крана и получения соответствующей измеренной величины давления; управляющий элемент используется для сравнения измеренной величины давления с заданной величиной давления и управления натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания, если измеренная величина давления больше или равна заданной величине давления. Когда главная балка крана находится в непрерывном процессе изменения вылета стрелы и подъема, момент, воздействующий на главную балку в направлении против часовой стрелки под действием тяжелого объекта, постепенно увеличивается, и, таким образом, давление, испытываемое изменяющим вылет стрелы гидравлическим цилиндром главной балки, постепенно увеличивается; датчик давления определяет давление, испытываемое изменяющим вылет стрелы гидравлическим цилиндром, в режиме реального времени и затем передает данные о давлении управляющему элементу, и управляющий элемент сравнивает выявленную величину давления с заданной величиной давления, введенной в управляющий элемент заранее, и если выявленная величина давления больше или равна заданной величине давления, управляющий элемент управляет натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания, чтобы увеличивать натяжное давление натяжного гидравлического цилиндра, натяжение высокоподъемного проволочного каната высокоподъемного устройства и высокоподъемный момент высокоподъемного устройства, воздействующий на главную балку, и эффективно балансирует давление изменяющего вылет стрелы гидравлического цилиндра, что заметно улучшает характеристики высокоподъемности высокоподъемного устройства.
В предпочтительном варианте осуществления изобретения указанная выше система управления также может включать датчик длины. Датчик длины используется для определения длины высокоподъемного проволочного каната высокоподъемного устройства, когда измеренная величина давления меньше заданной величины давления, и вводит измеренную величину длины в управляющий элемент. Управляющий элемент сравнивает измеренную величину длины с диапазоном установок длины, и если измеренная величина длины находится в пределах диапазона установок длины, управляющий элемент управляет натяжным гидравлическим цилиндром для его свободного удлинения или укорачивания; когда измеренная величина длины больше максимальной величины длины диапазона установок длины, управляющий элемент управляет натяжным гидравлическим цилиндром для его укорачивания; и если измеренная величина длины меньше минимальной величины длины диапазона установок длины, управляющий элемент управляет натяжным гидравлическим цилиндром для его удлинения. Таким образом, если измеренная величина давления меньше величины заданного давления, натяжной гидравлический цилиндр может не осуществлять дальнейшее натяжение. В этом случае, измеренная величина длины может быть принята в качестве базиса для управления регулированием состояния натяжного гидравлического цилиндра. Соответственно, натяжной гидравлический цилиндр может быть отрегулирован до состояния, соответствующего другим состояниям длины высокоподъемного проволочного каната, что дополнительно улучшает эффективность системы управления.
В другом предпочтительном варианте осуществления изобретения система управления, согласно настоящему изобретению, также может включать датчик состояния для определения состояния главной балки крана и передачи обнаруженного сигнала состояния управляющему элементу. Управляющий элемент управляет состоянием главной балки в соответствии с заданной стратегией, и, если главная балка находится в состоянии изменения вылета стрелы, управляющий элемент управляет датчиком давления для определения давления изменяющего вылет стрелы гидравлического цилиндра. Таким образом, указанный выше датчик давления не работает, когда главная балка не находится в состоянии изменения вылета стрелы, и начинает работать, когда определено, что главная балка находится в состоянии изменения вылета стрелы, что исключает недостоверное измерение датчиком давления и упрощает последовательность операций системы управления.
Способ управления высокоподъемным устройством согласно настоящему изобретению дает такие же технические эффекты, как и технические эффекты указанной выше системы управления, которая не будет здесь описана.
Краткое описание чертежей
Фиг. 1 - схематический вид конструкции типичного высокоподъемного устройства;
фиг. 2 - схематический вид структуры первого варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению;
фиг. 3 - схематический вид структуры второго варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению;
фиг. 4 - схематический вид структуры третьего варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению;
фиг. 5 - схематический вид структуры четвертого варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению;
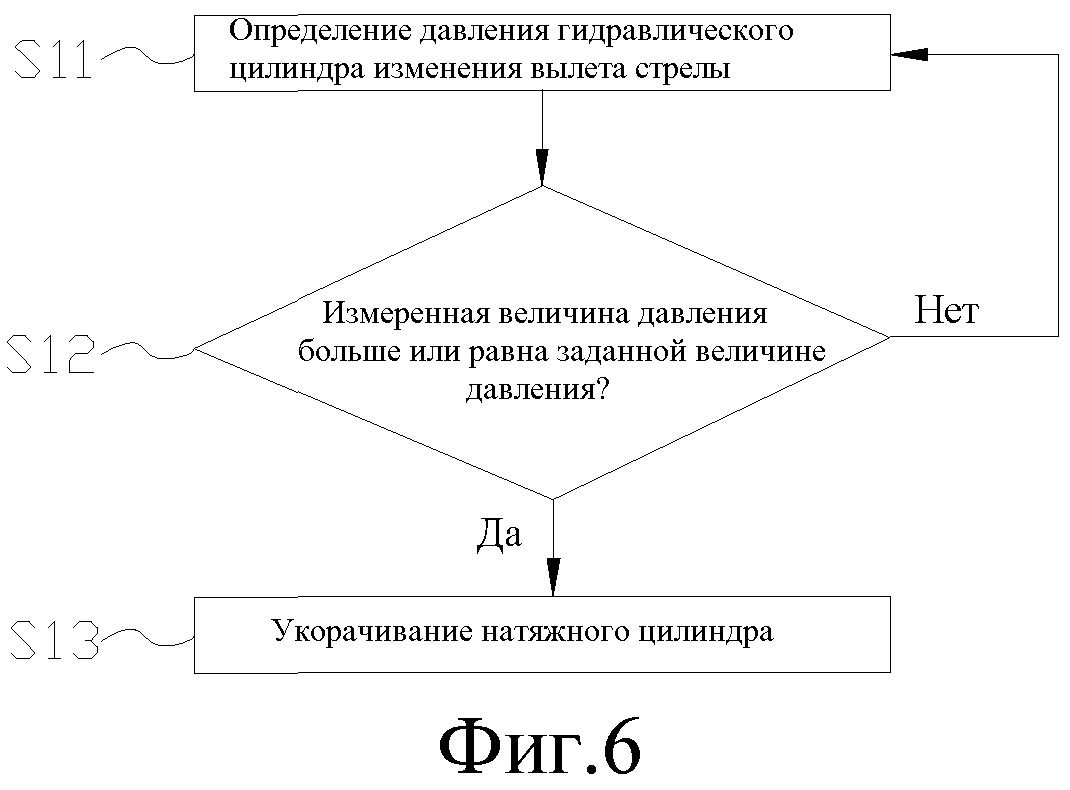
фиг. 6 - блок-схема первого варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению;
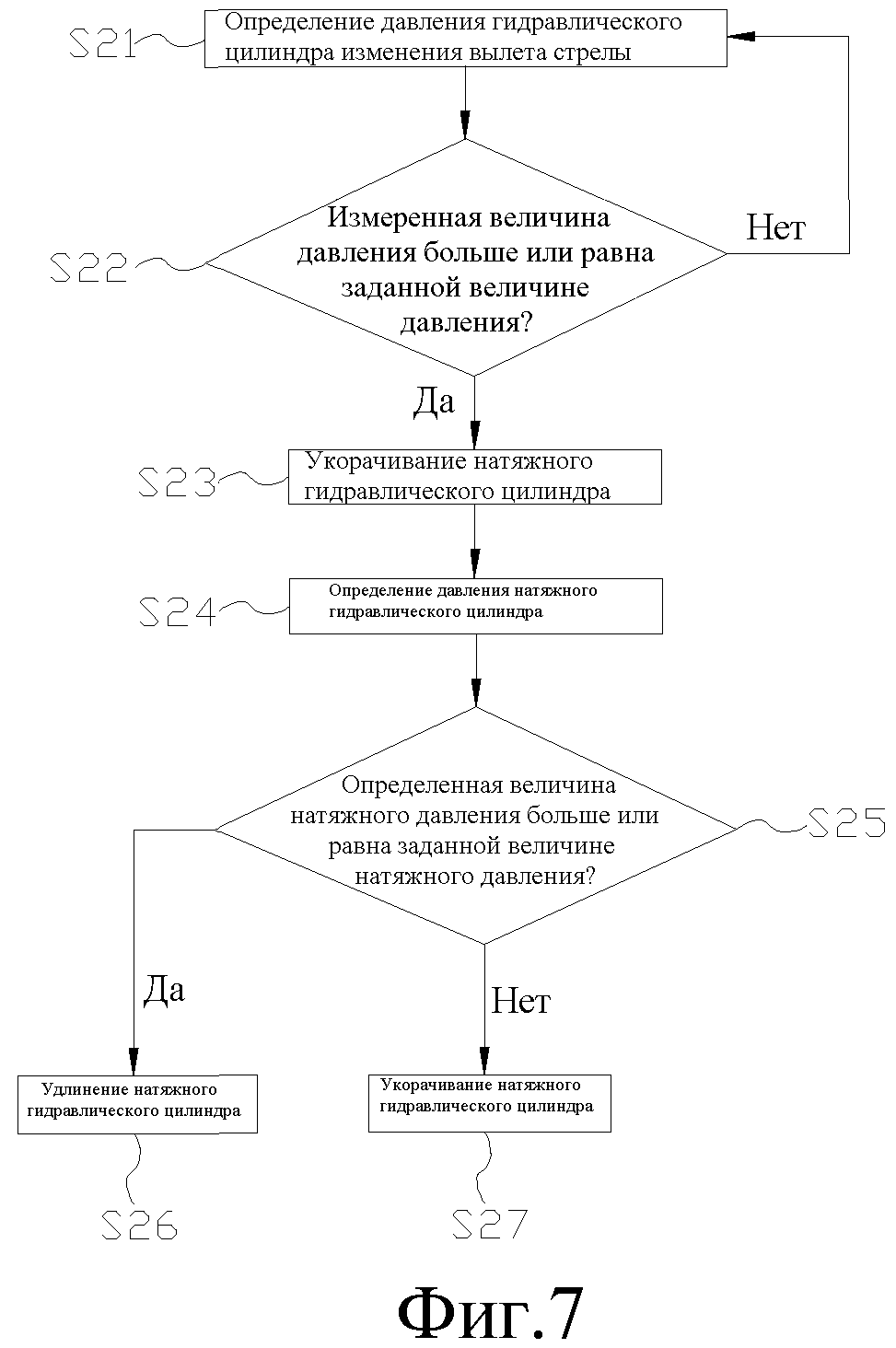
фиг. 7 - блок-схема второго варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению;
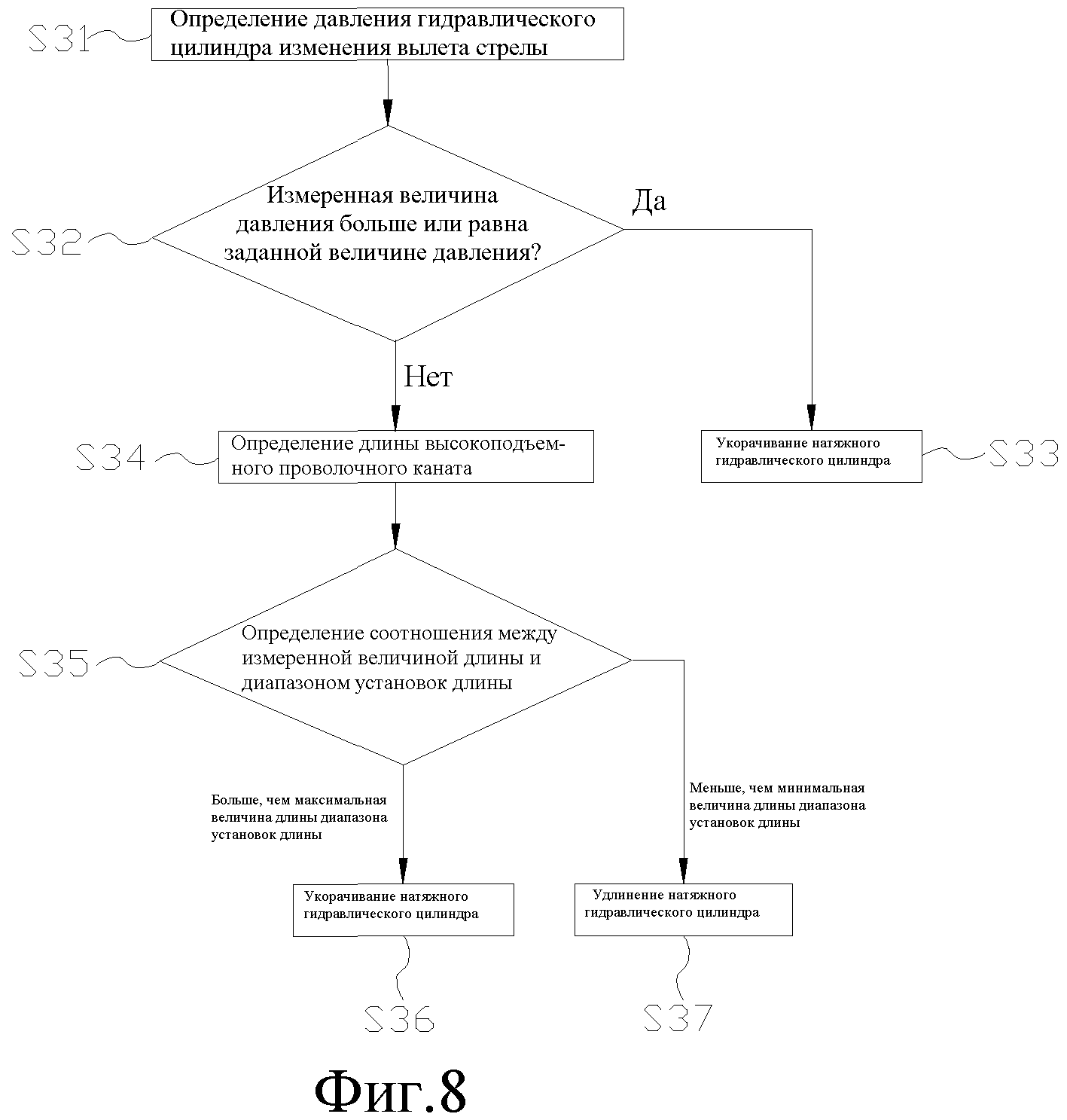
фиг. 8 - блок-схема третьего варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению; и
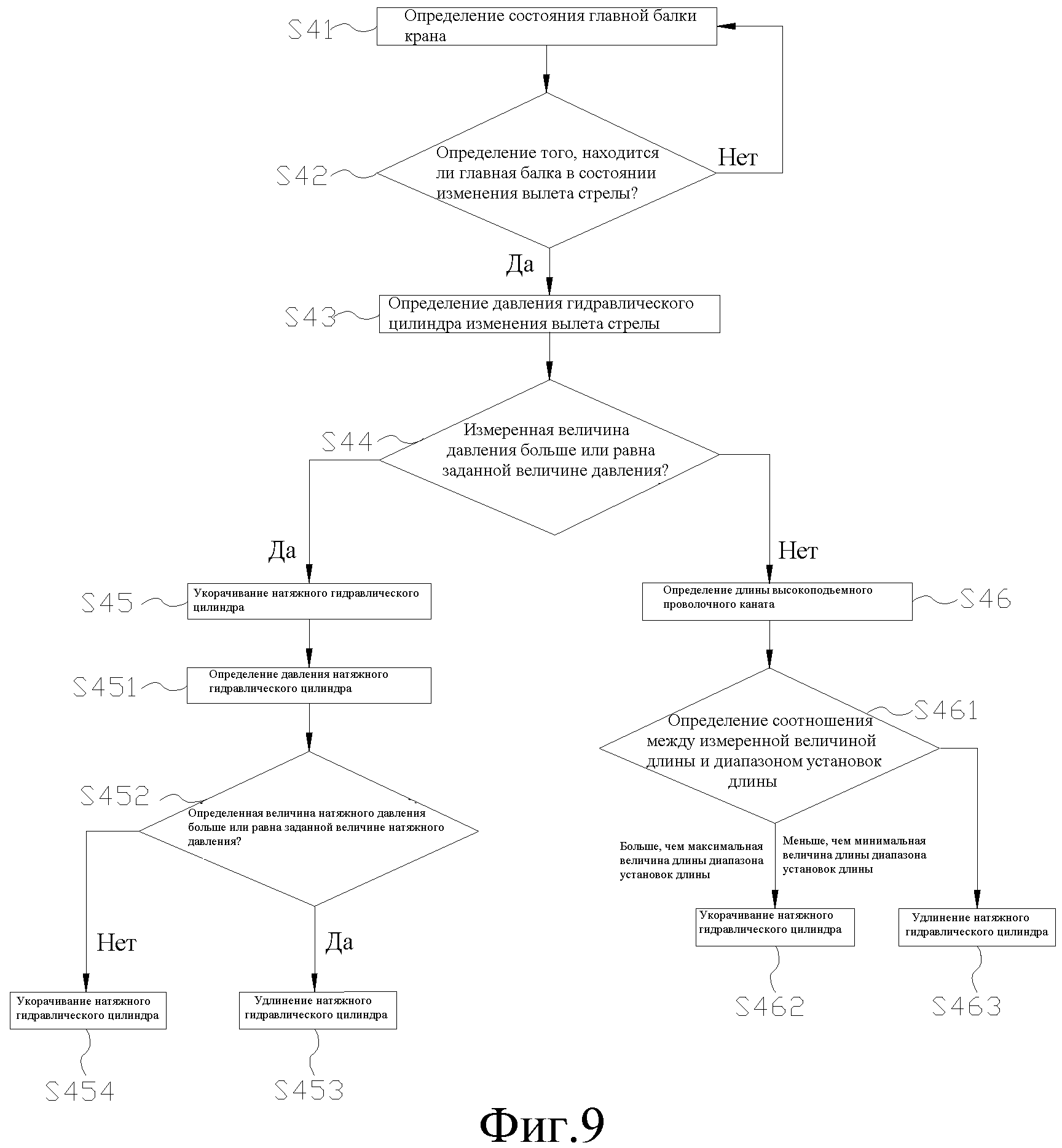
фиг. 9 - блок-схема четвертого варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению.
Подробное описание изобретения
Объект настоящего изобретения состоит в получении системы управления для высокоподъемного устройства крана, которая может улучшить характеристики высокоподъемности высокоподъемного устройства. Другим объектом настоящего изобретения является получение высокоподъемного устройства, включающего указанную выше систему управления, и способа управления для высокоподъемного устройства.
Для лучшего понимания технического решения согласно настоящему изобретению специалистами в данной области техники настоящее изобретение будет описано далее подробно на примерах вариантов его осуществления в сочетании с чертежами.
На фиг. 2 показан схематический вид структуры первого варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению.
В первом варианте осуществления изобретения система управления для высокоподъемного устройства крана согласно настоящему изобретению (также в дальнейшем для краткости называемая "системой управления") может быть применена для любого высокоподъемного устройства, которое осуществляет высокий подъем с использованием взаимодействия телескопических гидравлических цилиндров и проволочных канатов. Система управления включает элемент 21 определения давления и управляющий элемент 22. Элемент 21 определения давления используется для определения давления изменяющего вылет стрелы гидравлического цилиндра крана и получения измеренной величины давления; управляющий элемент 22 используется для сравнения измеренной величины давления с заданной величиной давления и управления натяжным гидравлическим цилиндром 23 высокоподъемного устройства для его укорачивания, когда измеренная величина давления больше или равна заданной величине давления.
Элемент 21 определения давления может быть датчиком давления, установленным на изменяющем вылет стрелы гидравлическом цилиндре. Давление изменяющего вылет стрелы гидравлического цилиндра определяется датчиком давления в режиме реального времени.
Элемент 21 определения давления не ограничен датчиком давления, он может обнаруживать другие типы ожидаемых сигналов другими типами датчиков и затем косвенно получать данные мгновенного давления изменяющего вылет стрелы гидравлического цилиндра на основе зависимости между сигналами непосредственного измерения и давлением изменяющего вылет стрелы гидравлического цилиндра. Очевидно, главной целью здесь является получение величин параметров мгновенного давления изменяющего вылет стрелы гидравлического цилиндра. Таким образом, если возможно, непосредственно измеренная величина давления изменяющего вылет стрелы гидравлического цилиндра является лучшим вариантом, который может исключать преобразование между различными типами параметров, таким образом, упрощая вычислительный процесс и снижая коэффициент ошибок.
Датчик давления не ограничен установкой в конкретном положении изменяющего вылет стрелы гидравлического цилиндра. Если измерение давления может осуществляться, положение установки не ограничено описанием.
Величина заданного давления является контрольным значением, предварительно введенным в управляющий элемент 22. Численное значение величины заданного давления может быть определено типом и высокоподъемностью высокоподъемного устройства. В разных высокоподъемных устройствах величина заданного давления может быть разной.
Следует отметить, что когда натяжной гидравлический цилиндр 23 втянут, высокоподъемный проволочный канат, которым управляет натяжной гидравлический цилиндр 23, натягивается, и натяжение высокоподъемного проволочного каната, проходящего к главной балке крана, увеличивается, и, таким образом, высокоподъемная сила увеличивается; соответственно, когда натяжной гидравлический цилиндр 23 удлиняется, высокоподъемный проволочный канат, которым управляет натяжной гидравлический цилиндр 23, ослабляется, и натяжение высокоподъемного проволочного каната, проходящего к главной балке крана, уменьшается, и, таким образом, высокоподъемная сила уменьшается.
Когда главная балка крана находится в состоянии непрерывного процесса изменения вылета стрелы и подъема, момент, воздействующий на главную балку в направлении против часовой стрелки под действием тяжелого объекта, постепенно увеличивается, и, таким образом, давление, испытываемое изменяющим вылет стрелы гидравлическим цилиндром главной балки, постепенно увеличивается; элемент 21 определения давления определяет давление, испытываемое изменяющим вылет стрелы гидравлическим цилиндром, в режиме реального времени и затем передает данные о давлении управляющему элементу 22, и управляющий элемент 22 сравнивает выявленную величину давления с заданной величиной давления, предварительно введенной в управляющий элемент 22, и когда выявленная величина давления больше или равна заданной величине давления, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 высокоподъемного устройства для его укорачивания, чтобы эффективно увеличивать натяжное давление натяжного гидравлического цилиндра 23, натяжение высокоподъемного проволочного каната высокоподъемного устройства и высокоподъемный момент высокоподъемного устройства, воздействующий на главную балку, и балансировать давление изменяющего вылет стрелы гидравлического цилиндра, что значительно улучшает характеристики высокоподъемности высокоподъемного устройства.
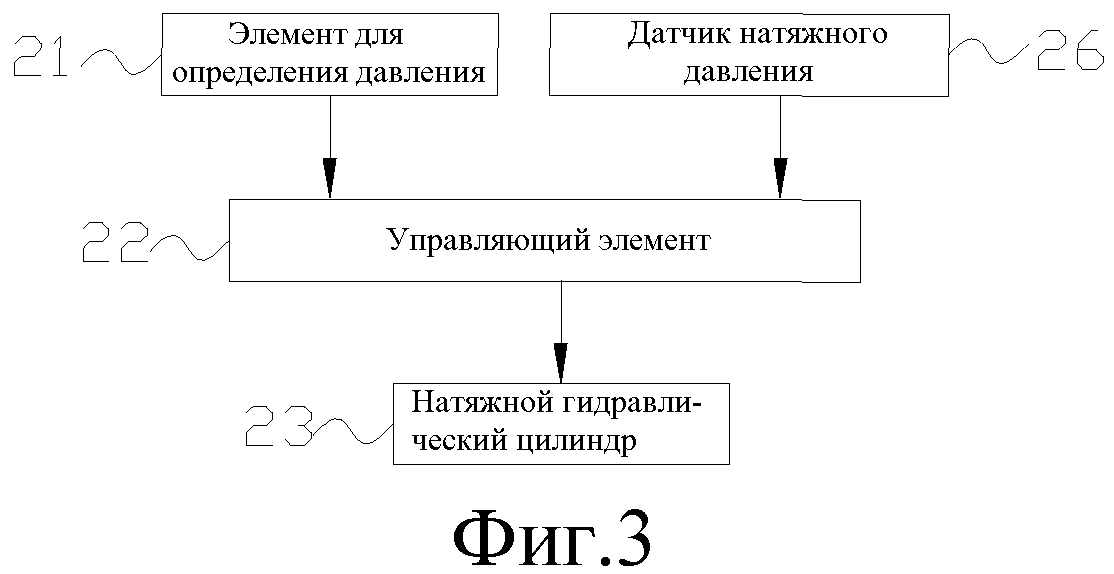
На фиг. 3 показан схематический вид структуры второго варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению.
Во втором варианте осуществления изобретения система управления может, кроме того, включать датчик 26 давления натяжения для определения давления натяжного гидравлического цилиндра 23 и передавать сигнал давления натяжения к управляющему элементу 22; управляющий элемент 22 сравнивает обнаруженную величину давления натяжения с заданной величиной давления натяжения; когда определенная величина давления натяжения больше или равна заданной величине давления натяжения, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 для его удлинения; и когда определенная величина давления натяжения меньше заданной величины давления натяжения, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 для его укорачивания.
Следует отметить, что датчик 26 давления натяжения должен осуществлять контроль после того, как давление изменяющего вылет стрелы гидравлического цилиндра превышает величину заданного давления, и натяжной гидравлический цилиндр 23 укорочен, и когда давление натяжного гидравлического цилиндра 23, определенное датчиком 26 давления натяжения, меньше, чем заданная величина давления натяжения, натяжной гидравлический цилиндр 23 продолжает укорачиваться; когда натяжной гидравлический цилиндр 23 укорочен до предела, и давление натяжного гидравлического цилиндра, определенное датчиком 26 давления натяжения, больше или равно заданной величине давления натяжения в этот момент, натяжной гидравлический цилиндр 23 больше не укорачивается, но удлинен, что исключает проблему, заключающуюся в том, что натяжной гидравлический цилиндр 23 превышает свой предел укорачивания, вызывая повреждение натяжного гидравлического цилиндра 23, и увеличивает срок службы натяжного гидравлического цилиндра 23.
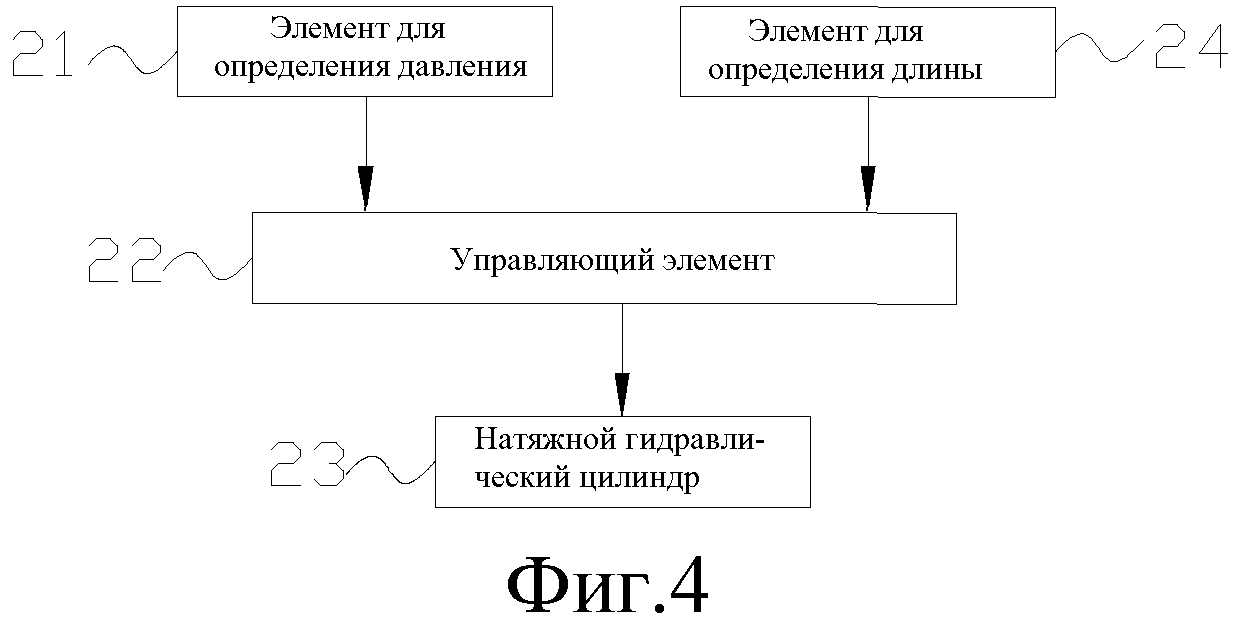
На фиг. 4 показан схематический вид структуры третьего варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению.
В третьем варианте осуществления изобретения система управления согласно настоящему изобретению также может включать элемент 24 для определения длины. Элемент 24 для определения длины используется для определения длины высокоподъемного проволочного каната высокоподъемного устройства, если измеренная величина давления меньше, чем величина заданного давления, и вводит измеренную величину длины в управляющий элемент 22. После получения измеренной величины длины управляющий элемент 22 определяет зависимость между измеренной величиной длины и диапазоном установок длины. В частности, когда измеренная величина длины в пределах диапазона установок длины, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 для его свободного удлинения или укорачивания, что, очевидно, означает, что натяжной гидравлический цилиндр 23 удлиняется или укорачивается наряду с действием изменяющего вылет стрелы гидравлического цилиндра. Если измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 для его укорачивания; и если измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 для его удлинения.
Таким образом, если измеренная величина давления меньше, чем величина заданного давления, натяжной гидравлический цилиндр 23 не требует дальнейшего натяжения. В этот момент измеренная величина длины может быть принята в качестве базиса для управления регулированием состояния натяжного гидравлического цилиндра 23. Соответственно, натяжной гидравлический цилиндр 23 может быть отрегулирован до состояния, соответствующего разным состояниям длины высокоподъемного проволочного каната, что дополнительно улучшает эффективность системы управления.
Элемент 24 для определения длины не ограничен определением длины высокоподъемного проволочного каната высокоподъемного устройства, когда измеренная величина давления меньше, чем величина заданного давления, но может определять длину высокоподъемного проволочного каната в любой момент во время работы высокоподъемного устройства. Но в этом случае, состояния его вывода в разные моменты изменяются.
Элемент 24 для определения длины может быть датчиком длины, установленным между натяжным гидравлическим цилиндром 23 и оголовком стрелы крана. Датчик длины определяет длину высокоподъемного проволочного каната в режиме реального времени и передает величину длины управляющему элементу 22, чтобы управлять действием натяжного гидравлического цилиндра 23 управляющим элементом 22.
Элемент 24 для определения длины не ограничен датчиком длины, но может представлять собой другие типы датчиков и преобразовывать обнаруженные сигналы других типов в сигнал длины.
Датчик длины не ограничен установкой между натяжным гидравлическим цилиндром 23 и оголовком стрелы крана, но может быть установлен в других надлежащих положениях.
В систему управления согласно настоящему изобретению могут быть внесены дополнительные усовершенствования.
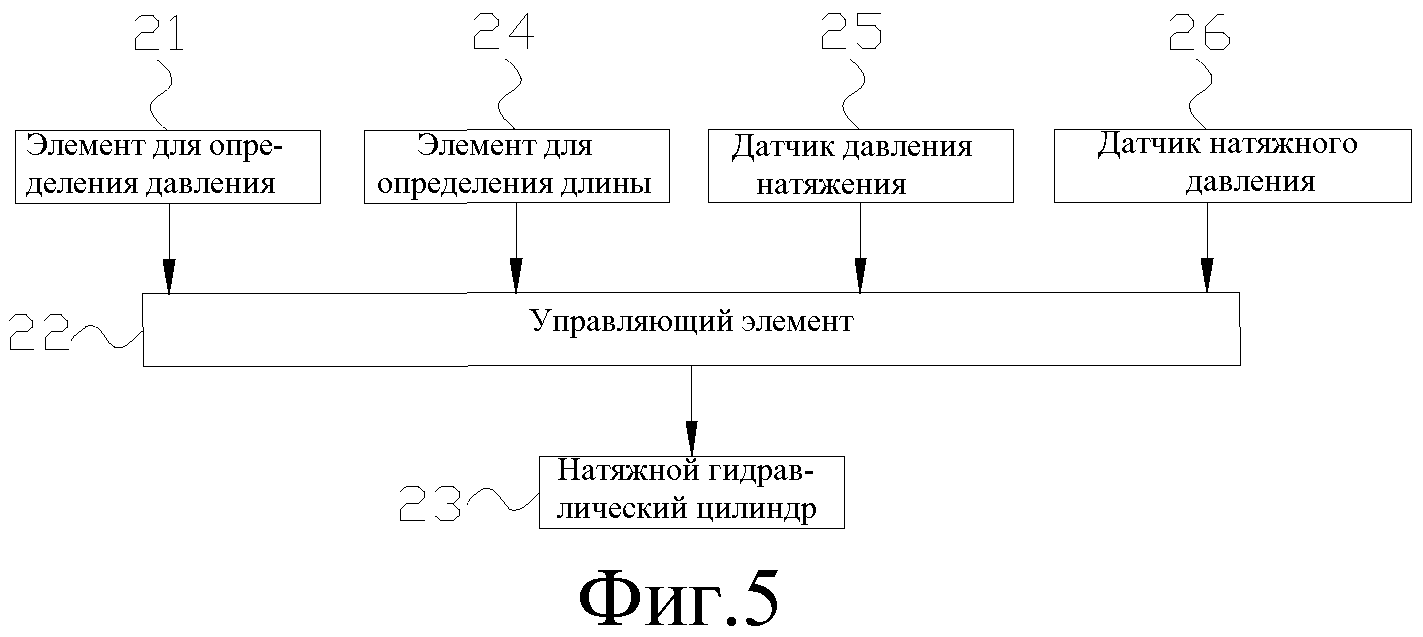
На фиг. 5 показан схематический вид структуры четвертого варианта выполнения системы управления для высокоподъемного устройства согласно настоящему изобретению.
В четвертом варианте осуществления изобретения система управления согласно настоящему изобретению также может включать датчик 25 состояния. Датчик 25 состояния используется для определения состояния главной балки крана и передачи обнаруженного сигнала состояния управляющему элементу 22. После получения сигнала состояния управляющий элемент 22 определяет состояние главной балки в соответствии с заданной стратегией. Когда главная балка находится в состоянии изменения вылета стрелы, управляющий элемент 22 управляет элементом 21 определения давления для определения давления изменяющего вылет стрелы гидравлического цилиндра. Таким образом, указанный выше элемент 21 определения давления не работает, когда главная балка не находится в состоянии изменения вылета стрелы, и начинает работать, когда определено, что главная балка находится в состоянии изменения вылета стрелы, что исключает недостоверное определение элементом 21 определения давления и упрощает последовательность операций системы управления.
Датчик 25 состояния может быть датчиком угла. Здесь заданная стратегия состоит в том, чтобы сравнивать обнаруженную угловую величину с заданной угловой величиной, и определять, что главная балка находится в состоянии изменения вылета стрелы, когда обнаруженная угловая величина больше, чем заданная угловая величина. Заданная стратегия не ограничена режимом определения того, что обнаруженная угловая величина больше, чем заданная угловая величина, но может предусматривать другие заданные режимы. Заданная угловая величина должна быть величиной, имеющей некоторое вычислительное соотношение с обнаруженной угловой величиной, и должна быть введена в управляющий элемент 22 заранее.
Помимо указанной выше системы управления, настоящее изобретение также обеспечивает получение высокоподъемного устройства, включающего указанную выше систему управления. Что касается конкретной конструкции других частей высокоподъемного устройства, пожалуйста, обращайтесь к известному уровню техники, который не будет здесь описан.
Настоящее изобретение также обеспечивает получение способа управления для высокоподъемного устройства крана.
На фиг. 6 показана блок-схема первого варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению.
В первом варианте осуществления изобретения способ управления для высокоподъемного устройства согласно настоящему изобретению (называемый далее способом управления для краткости) включает следующие этапы:
этап S11: определение давления изменяющего вылет стрелы гидравлического цилиндра крана и получение измеренной величины давления;
этап S12: сравнение измеренной величины давления с заданной величиной давления и, если измеренная величина давления больше или равна заданной величине давления, переход к этапу S13; в противном случае, переход к этапу S11;
этап S13: управление натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания.
На этапе S11 измеренная величина давления измеряется датчиком давления, установленным на изменяющем вылет стрелы гидравлическом цилиндре. Измеренная величина давления не ограничена измерением датчиком давления, но может быть получена посредством измерения других типов параметров другими типами датчика и затем преобразования измеренного параметра в величину давления. Следует отметить, что измеренный параметр должен иметь некоторую зависимость преобразования с величиной давления и не должен быть полностью несущественным параметром.
Когда главная балка крана находится в процессе непрерывного изменения вылета стрелы и подъема, момент, воздействующий на главную балку в направлении против часовой стрелки под действием тяжелого объекта, постепенно увеличивается, и, таким образом, давление, испытываемое изменяющим вылет стрелы гидравлическим цилиндром главной балки, постепенно увеличивается; элемент 21 определения давления определяет давление, испытываемое изменяющим вылет стрелы гидравлическим цилиндром, в режиме реального времени, и затем передает данные о давлении управляющему элементу 22, и управляющий элемент 22 сравнивает выявленную величину давления с заданной величиной давления, введенной в управляющий элемент 22 заранее, и когда выявленная величина давления больше или равна заданной величине давления, управляющий элемент 22 управляет натяжным гидравлическим цилиндром 23 высокоподъемного устройства для его укорачивания, чтобы эффективно увеличивать натяжное давление натяжного гидравлического цилиндра 23, натяжение высокоподъемного проволочного каната высокоподъемного устройства и высокоподъемный момент высокоподъемного устройства, воздействующий на главную балку, и балансировать давление изменяющего вылет стрелы гидравлического цилиндра, что значительно улучшает характеристики высокоподъемности высокоподъемного устройства.
На фиг. 7 показана блок-схема второго варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению.
Во втором варианте осуществления изобретения способ управления согласно настоящему изобретению может включать следующие этапы:
этап S21: определение давления изменяющего вылет стрелы гидравлического цилиндра крана и получения измеренной величины давления;
этап S22: сравнение измеренной величины давления с заданной величиной давления и, если измеренная величина давления больше или равна заданной величине давления, переход к этапу S23;
этап S23: управление натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания и переход к этапу S24 и следующим этапам;
этап S24: определение давления натяжного гидравлического цилиндра и передача сигнала давления натяжения управляющему элементу;
этап S25: сравнение определенной величины давления натяжения с заданной величиной давления натяжения и, когда определенная величина давления натяжения больше или равна заданной величине давления натяжения, переход к этапу S26; когда определенная величина давления натяжения меньше, чем заданная величина давления натяжения, переход к этапу S27;
этап S26: управление натяжным гидравлическим цилиндром для его удлинения;
этап S27: управление натяжным гидравлическим цилиндром для его укорачивания.
Датчик 26 давления натяжения должен осуществлять контроль после того, как давление изменяющего вылет стрелы гидравлического цилиндра превышает величину заданного давления, и натяжной гидравлический цилиндр 23 укорочен, и, когда давление натяжного гидравлического цилиндра 23, определенное датчиком 26 давления натяжения, меньше, чем заданная величина давления натяжения, натяжной гидравлический цилиндр 23 продолжает укорачиваться; когда натяжной гидравлический цилиндр 23 укорочен до предела, давление натяжного гидравлического цилиндра 23, определенное датчиком 26 давления натяжения, больше или равно заданной величине давления натяжения, и в этот момент натяжной гидравлический цилиндр 23 больше не укорачивается, но удлинен, что исключает проблему того, что натяжной гидравлический цилиндр 23 превышает свой предел укорачивания с вероятностью повреждения натяжного гидравлического цилиндра 23, и увеличивает срок службы натяжного гидравлического цилиндра 23.
На фиг. 8 показана блок-схема третьего варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению.
В третьем варианте осуществления изобретения способ управления согласно настоящему изобретению может включать следующие этапы:
этап S31: определение давления изменяющего вылет стрелы гидравлического цилиндра крана и получение измеренной величины давления;
этап S32: сравнение измеренной величины давления с заданной величиной давления и, если измеренная величина давления больше или равна заданной величине давления, переход к этапу S33; в противном случае, переход к этапу S34;
этап S33: управление натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания;
этап S34: определение длины высокоподъемного проволочного каната высокоподъемного устройства и передача измеренной величины длины управляющему элементу;
этап S35: определение зависимости между измеренной величиной длины и диапазоном установок длины и, если измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, переход к этапу S36; если измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, переход к этапу S37;
этап S36: управление натяжным гидравлическим цилиндром для его укорачивания;
этап S37: управление натяжным гидравлическим цилиндром для его удлинения.
Таким образом, когда измеренная величина давления меньше, чем величина заданного давления, натяжной гидравлический цилиндр 23 не требует дальнейшего натяжения, и в этот момент измеренная величина длины может быть принята в качестве базиса для управления регулированием состояния натяжного гидравлического цилиндра 23. Соответственно, натяжной гидравлический цилиндр 23 может быть отрегулирован до состояния, соответствующего различным состояниям длины высокоподъемного проволочного каната, что дополнительно улучшает эффективность системы управления.
Измеренная на этапе S34 величина длины может быть измерена датчиком длины, причем датчик длины может быть установлен между натяжным гидравлическим цилиндром 23 и оголовком стрелы крана. Измеренная величина длины также может быть получена посредством обнаружения других типов параметров другими типами датчиков и преобразования обнаруженного параметра в параметр длины. Датчик длины не ограничен установкой между натяжным гидравлическим цилиндром 23 и оголовком стрелы крана, но может быть установлен в других положениях, где он может осуществлять измерение длины.
Могут быть сделаны дополнительные усовершенствования способа управления согласно настоящему изобретению.
На фиг. 9 показана блок-схема четвертого варианта осуществления способа управления для высокоподъемного устройства согласно настоящему изобретению.
В четвертом варианте осуществления изобретения способ управления согласно настоящему изобретению может включать следующие этапы:
этап S41: обнаружение состояния главной балки крана и получения сигнала состояния;
этап S42: определение состояния главной балки и, если главная балка находится в состоянии изменения вылета стрелы, переход к этапу S43; в противном случае, переход к этапу S41;
этап S43: определение давления изменяющего вылет стрелы гидравлического цилиндра крана и получение измеренной величины давления;
этап S44: сравнение измеренной величины давления с заданной величиной давления и, если измеренная величина давления больше или равна заданной величине давления, переход к этапу S45 и следующим этапам; в противном случае, переход к этапу S46 и следующим этапам;
этап S45: управление натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания;
этап S451: определение давления натяжного гидравлического цилиндра и передача сигнала давления натяжения управляющему элементу;
этап S452: сравнение определенной величины давления натяжения с заданной величиной давления натяжения и, когда определенная величина давления натяжения больше или равна заданной величине давления натяжения, переход к этапу S453; когда определенная величина давления натяжения меньше, чем заданная величина давления натяжения, переход к этапу S454;
этап S453: управление натяжным гидравлическим цилиндром для его удлинения;
этап S454: управление натяжным гидравлическим цилиндром для его укорачивания;
этап S46: обнаружение длины высокоподъемного проволочного каната высокоподъемного устройства и передача измеренной величины длины управляющему элементу;
этап S461: определение зависимости между измеренной величиной длины и диапазоном установок длины и, если измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, переход к этапу S462; если измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, переход к этапу S463;
этап S462: управление натяжным гидравлическим цилиндром для его укорачивания;
этап S463: управление натяжным гидравлическим цилиндром для его удлинения.
На этапе S461, если измеренная величина длины находится в пределах диапазона установок длины, натяжной гидравлический цилиндр 23 может быть удлинен или укорочен свободно, то есть может быть удлинен или укорочен наряду с действием изменяющего вылет стрелы гидравлического цилиндра.
Таким образом, указанный выше элемент 21 определения давления не работает, когда главная балка не находится в состоянии изменения вылета стрелы, и начинает работать, когда определено, что главная балка находится в состоянии изменения вылета стрелы, что исключает недостоверное определение элементом 21 определения давления и упрощает последовательность операций системы управления.
Датчик 25 состояния может быть датчиком угла. В этом случае, заданная стратегия состоит в том, чтобы сравнивать обнаруженную угловую величину с заданной угловой величиной и определять, что главная балка находится в состоянии изменения вылета стрелы, когда обнаруженная угловая величина больше, чем заданная угловая величина. Заданная стратегия не ограничена режимом, согласно которому обнаруженная угловая величина больше, чем заданная угловая величина, но может соответствовать другим заданным режимам. Заданная угловая величина должна быть величиной, имеющей некоторое вычислительное соотношение с обнаруженной угловой величиной, и должна быть введена в управляющий элемент 22 заранее.
Выше подробно описаны высокоподъемное устройство крана, система управления им и способ управления им согласно настоящему изобретению. В настоящем описании используются конкретные примеры для описания принципов и вариантов осуществления настоящего изобретения. Приведенное выше описание используется только для лучшего понимания способа и сущности настоящего изобретения. Следует отметить, что специалист в данной области техники может внести любые модификации и усовершенствования в настоящее изобретение, не отступая от принципов настоящего изобретения, и эти модификации и усовершенствования также будут входить в объем охраны настоящего изобретения.
Реферат
Изобретение относится к системе управления для высокоподъемного крана. Система управления для высокоподъемного устройства крана содержит элемент (21) для определения давления гидравлического цилиндра переменной длины и получения измеренной величины давления и управляющий элемент (22) для сравнения измеренной величины давления с заданной величиной давления. Когда измеренная величина давления больше или равна заданной величине давления, натяжной гидравлический цилиндр (23) укорачивается. Благодаря этому увеличивается натяжное давление натяжного гидравлического цилиндра (23), усиливается натяжение высокоподъемного троса в высокоподъемных устройствах и увеличивается высокоподъемный момент, прилагаемый к главной балке высокоподъемного устройства. Изобретение относится также к способу управления высокоподъемным устройством и к высокоподъемному устройству с указанной выше системой управления. В результате давление гидравлического цилиндра переменной длины эффективно балансируется, что улучшает рабочие характеристики высокоподъемного крана. 3 н. и 7 з.п. ф-лы, 9 ил.
Формула
элемент (21) для определения давления, предназначенный для определения давления изменяющего вылет стрелы гидравлического цилиндра крана и получения измеренной величины давления;
управляющий элемент (22) для сравнения измеренной величины давления с заданной величиной давления и управления натяжным гидравлическим цилиндром (23) высокоподъемного устройства для его укорачивания, если измеренная величина давления больше или равна заданной величине давления.
датчик (26) давления натяжения для определения давления натяжного гидравлического цилиндра (23) и передачи сигнала давления натяжения управляющему элементу (22);
при этом управляющий элемент (22) получает сигнал давления натяжения и сравнивает определенную величину давления натяжения с заданной величиной давления натяжения;
если определенная величина давления натяжения больше или равна заданной величине давления натяжения, управляющий элемент (22) управляет натяжным гидравлическим цилиндром (23) для его удлинения;
и если определенная величина давления натяжения меньше, чем заданная величина давления натяжения, управляющий элемент (22) управляет натяжным гидравлическим цилиндром (23) для его укорачивания.
элемент (24) для определения длины, предназначенный для определения длины высокоподъемного проволочного каната высокоподъемного устройства и ввода измеренной величины длины в управляющий элемент (22);
при этом управляющий элемент (22) определяет зависимость между измеренной величиной длины и диапазоном установок длины;
если измеренная величина давления меньше, чем заданная величина давления, и измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, управляющий элемент (22) управляет натяжным гидравлическим цилиндром (23) для его укорачивания;
и если измеренная величина давления меньше, чем заданная величина давления, и измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, управляющий элемент (22) управляет натяжным гидравлическим цилиндром (23) для его удлинения.
элемент (25) для определения состояния, предназначенный для определения состояния главной балки крана и передачи полученного сигнала состояния управляющему элементу (22);
при этом управляющий элемент (22) определяет состояние главной балки в соответствии с заданной стратегией;
и если главная балка находится в состоянии изменения вылета стрелы, управляющий элемент (22) управляет элементом (21) для определения давления изменяющего вылет стрелы гидравлического цилиндра.
11) определяют давление изменяющего вылет стрелы гидравлического цилиндра крана и получают измеренную величину давления;
12) сравнивают измеренную величину давления с заданной величиной давления и, если измеренная величина давления больше или равна заданной величине давления, переходят к этапу 13); в противном случае, возвращаются к этапу 11);
13) управляют натяжным гидравлическим цилиндром высокоподъемного устройства для его укорачивания.
14) определяют давление натяжного гидравлического цилиндра и передают сигнал давления натяжения управляющему элементу;
15) сравнивают определенную величину давления натяжения с заданной величиной давления натяжения и, если определенная величина давления натяжения больше или равна заданной величине давления натяжения, переходят к этапу 16); если определенная величина давления натяжения меньше, чем заданная величина давления натяжения, переходят к этапу 17);
16) управляют натяжным гидравлическим цилиндром для его удлинения;
17) управляют натяжным гидравлическим цилиндром для его укорачивания.
18) определяют длину высокоподъемного проволочного каната высокоподъемного устройства и передают измеренную величину длины управляющему элементу;
19) определяют зависимость между измеренной величиной длины и диапазоном установок длины и, если измеренная величина длины больше, чем максимальная величина длины диапазона установок длины, переходят к этапу 110); если измеренная величина длины меньше, чем минимальная величина длины диапазона установок длины, переходят к этапу 111);
110) управляют натяжным гидравлическим цилиндром для его укорачивания;
111) управляют натяжным гидравлическим цилиндром для его удлинения.
01) определяют состояние главной балки крана и получают сигнал состояния;
02) определяют состояние главной балки и, если главная балка находится в состоянии изменения вылета стрелы, переходят к этапу 11); в противном случае, переходят к этапу 01).
Комментарии