Система управления погрузочного крана система управления погрузочного крана - RU2250192C2
Код документа: RU2250192C2
Чертежи

Описание
Изобретение относится к системе управления погрузочного крана, которая включает рабочее место управления для оператора крана, клапанное устройство направления, установленное вне рабочего места управления и предназначенное для управления гидравлической системой крана для выполнения им различных операций, и средство управления, воздействующее на штоки привода клапанного устройства направления для управления клапанным устройством направления с рабочего места управления краном, причем средство управления представляет собой механическую рычажно-приводную систему управления.
Такие системы управления в настоящее время хорошо известны, например, в лесопогрузчиках или кранах для насыпных грузов. Основное конструктивное решение в известном уровне техники заключается в том, что клапанное устройство направления, расположенное снаружи кабины управления, управляется с помощью тросов. Рычаги управления в этом случае расположены либо с двух сторон рабочего места управления, либо с той стороны, которая смотрит на кран, и со стороны двери, открывающейся наружу. Когда штоки привода управляются с помощью тросов, всегда имеются зазоры и силы трения в тросе, которые ухудшают управляющие свойства. В зимних условиях вода может собираться между тросом и защитной трубкой и замерзшая вода приводит к заеданию троса. Более того, замерзание может случиться во время управляемого движения, и заклиненный рычаг управления может привести к аварийной ситуации. Кроме того, штоки привода требуют специальных зажимов на концах тросов.
В качестве второго примера известного уровня техники можно привести конструктивное решение, в котором клапанное устройство направления расположено под сиденьем оператора. В этом устройстве рычаги управления шарнирно соединены непосредственно со штоками привода, при этом возникают проблемы с шумом, перегревом и запахами, вызванными горячим сжатым гидравлическим маслом. В таком устройстве движение рычага управления относительно движения штока привода с трудом поддается регулировке с тем, чтобы соответствовать движению руки. К другим недостаткам можно отнести наличие гидравлических шлангов в клапанном устройстве направления, которые идут к соединениям привода от кабины управления, а также сложности в настройке и обслуживании, когда клапанное устройство направления расположено в кабине.
Третьим примером известного уровня техники является система электрогидравлического вспомогательного управления клапанным устройством направления. В этом случае клапанное устройство может быть расположено произвольно относительно рабочего места управления. Однако проблема заключается в сложности и высокой стоимости такой системы.
Четвертый пример известного уровня техники описан в патенте США 4140200. Недостатками этой системы являются относительно сложная конструкция и неудобное расположение клапанного устройства направления.
Целью настоящего изобретения является создание новой системы управления, в которой устранены недостатки, присущие системам, известным из уровня техники. Эта цель достигается настоящим изобретением, которое отличается тем, что клапанное устройство направления установлено с наружной стороны рабочего места управления таким образом, что штоки привода находятся по существу в горизонтальном положении.
Указанная цель достигается вариантами выполнения системы управления, характеризующимися по первому варианту выполнения тем, что в системе управления погрузочного крана, содержащей рабочее место управления для оператора крана, клапанное устройство, предназначенное для управления гидравлической системой крана, средство управления, воздействующее на штоки привода клапанного устройства для управления клапанным устройством с рабочего места управления краном, при этом средство управления является механической рычажно-приводной системой управления, включающей в себя, по крайней мере, один рычаг управления, тяги и шаровые шарниры, клапанное устройство расположено с наружной стороны и сбоку от рабочего места управления таким образом, что штоки привода упомянутого клапанного устройства находятся по существу в горизонтальном положении, по крайней мере, один рычаг управления соединен с тягами, причем одна из первых тяг, управляемая первым шаровым шарниром, через второй шаровой шарнир соединена с одной из других тяг с возможностью преобразования продольного движения первой тяги в поворотное движение второй тяги, передаваемое через опоры на соединительный рычажный узел, связанный с третьей тягой, который преобразует поворотное движение второй тяги в продольное движение третьей тяги, соединенной со штоком привода клапанного устройства для управления поворотом крана, а вторая тяга первых тяг, управляемая вторым шаровым шарниром, через третий шарнир соединена с другой тягой вторых тяг с возможностью преобразования ее продольного движения в поворотное движение упомянутой тяги, которое передается через опоры на соединительный рычажный узел, связанный с другой тягой третьих тяг, соединенной со штоком привода клапанного устройства, обеспечивающим выдвижение системы стрел.
Согласно второму варианту выполнения в системе управления погрузочного крана, содержащей рабочее место управления для оператора крана, клапанное устройство, предназначенное для управления гидравлической системой крана, средство управления, воздействующее на штоки привода клапанного устройства для управления клапанным устройством с рабочего места управления краном, при этом средство управления является механической рычажно-приводной системой управления, включающей в себя, по крайней мере, один рычаг управления, тяги и шаровые шарниры, клапанное устройство расположено с наружной стороны и сбоку от рабочего места управления таким образом, что штоки привода клапанного устройства находятся по существу в горизонтальном положении, по крайней мере, один рычаг управления соединен с тягами, причем одна из первых тяг, управляемая первым шаровым шарниром, через второй шаровой шарнир соединена с одной из вторых тяг с возможностью преобразования продольного движения упомянутой одной из первых тяг в продольное движение одной из вторых тяг, которое передается на соединительный рычажный узел, связанный с одной из третьих тяг, а соединительный рычажный узел преобразует продольное движение одной из вторых тяг в продольное движение одной из третьих тяг, соединенной со штоком привода клапанного устройства клапанного устройства, а вторая тяга первых тяг управляется другим шаровым шарниром, с которым соединен третий шаровой шарнир, соединенный со второй тягой вторых тяг таким образом, что продольное движение второй тяги первых тяг преобразуется в продольное движение этой тяги, которое передается на соответствующий рычажный узел, соединенный также со второй тягой третьих тяг, которая соединена со штоком привода клапанного устройства, обеспечивающим выдвижение системы стрел.
Согласно третьему варианту выполнения в системе управления погрузочного крана, содержащей рабочее место управления для оператора крана, клапанное устройство, предназначенное для управления гидравлической системой крана, средство управления, воздействующее на штоки привода клапанного устройства для управления клапанным устройством с рабочего места управления краном, при этом средство управления является механической рычажно-приводной системой управления, включающей в себя, по крайней мере, один рычаг управления, тяги и шаровые шарниры, клапанное устройство расположено с наружной стороны и сбоку от рабочего места управления таким образом, что штоки привода клапанного устройства находятся по существу в горизонтальном положении, по крайней мере, один рычаг управления соединен с соответствующими второй и третьей тягами с возможностью их продольного перемещения, при этом конец рычага управления соединен с шаровым шарниром, соединенным со вторыми тягами, которые также связаны с соединительными рычажными узлами, соединенными с третьими тягами, которые соединены со штоками привода клапанного устройства, при этом концы рычагов управления имеют прорези для шарниров с возможностью их перемещения в этих прорезях.
В упомянутых вариантах выполнения системы, по крайней мере, один рычаг управления установлен около сидения рабочего места управления и выполнен с возможностью поворота посредством фиксирующего элемента в положение “выключено и “включено” соответственно.
По сравнению с ранее известными устройствами данные изобретения обладают, например, тем преимуществом, что имеют меньшее количество гидравлических шлангов по сравнению с устройством, у которого клапанное устройство управления расположено, например, в кабине управления. Существенным преимуществом является также простота технического обслуживания и настройки. Клапанное устройство направления, расположенное снаружи, не вызывает проблем, связанных с шумом, запахами и выделением тепла в кабине управления. Управляющие функции обеспечиваются механическими рычагами, которые являются более точными и чувствительными по сравнению с управлением с помощью тросов. Зимние условия не сказываются вредно на работе механики. Клапанное устройство направления не требует никакого специального крепления для штоков привода, а в системе может использоваться стандартное клапанное устройство направления. Движение рычагов управления относительно штока привода легко регулируется путем изменения положения точек поворота, в результате чего обеспечивается требуемое движение рычага управления. Еще одно преимущество возникает благодаря тому, что согласно данному изобретению соединительные тяги рычагов управления могут быть установлены, например, по бокам кабины управления, а соединительные тяги педалей - вблизи от пола кабины управления. Благодаря этой системе управления остается больше свободного пространства, и в этом пространстве может быть размещено, например, обогревающее устройство кабины управления. Кроме того, складывающиеся рычаги управления обеспечивают безопасность, так как рычаги, складывающиеся благодаря шарнирному элементу, облегчают размещение на рабочем месте и покидание рабочего места управления, а также повышают безопасность оператора на рабочем месте путем предотвращения случайного движения рычагов к оператору. Наконец, преимуществом данного изобретения является его простота и низкая себестоимость.
Изобретение будет более подробно описано ниже со ссылками на приложенные чертежи, которые иллюстрируют предпочтительные варианты воплощения данного изобретения.
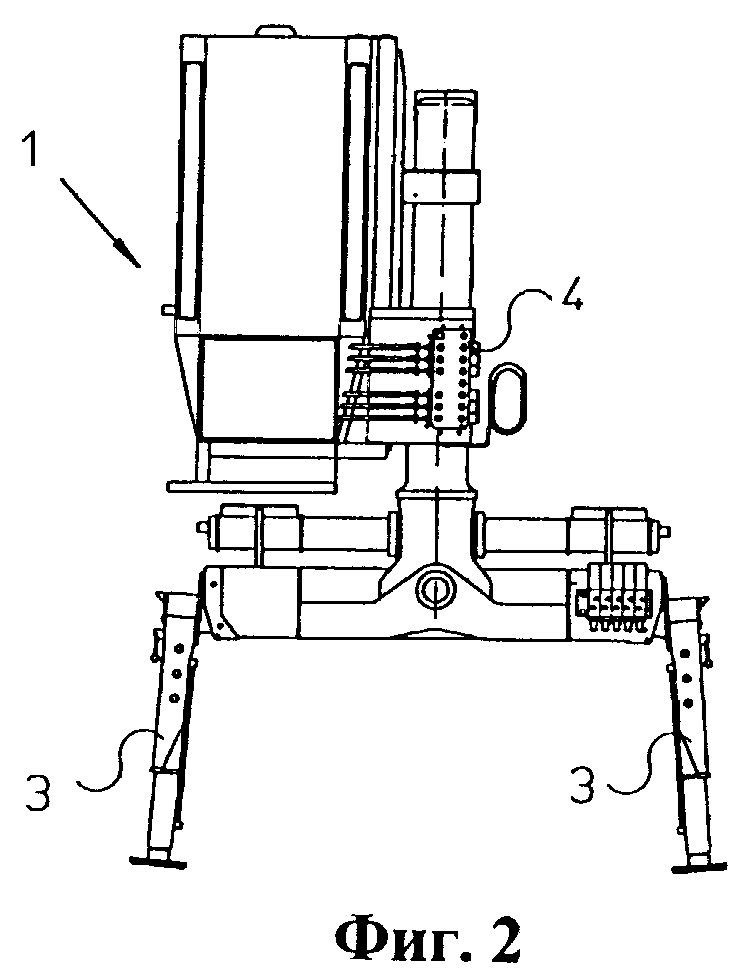
Фиг.1-3 иллюстрируют общие виды с разных направлений погрузочного крана, содержащего систему управления, согласно настоящему изобретению.
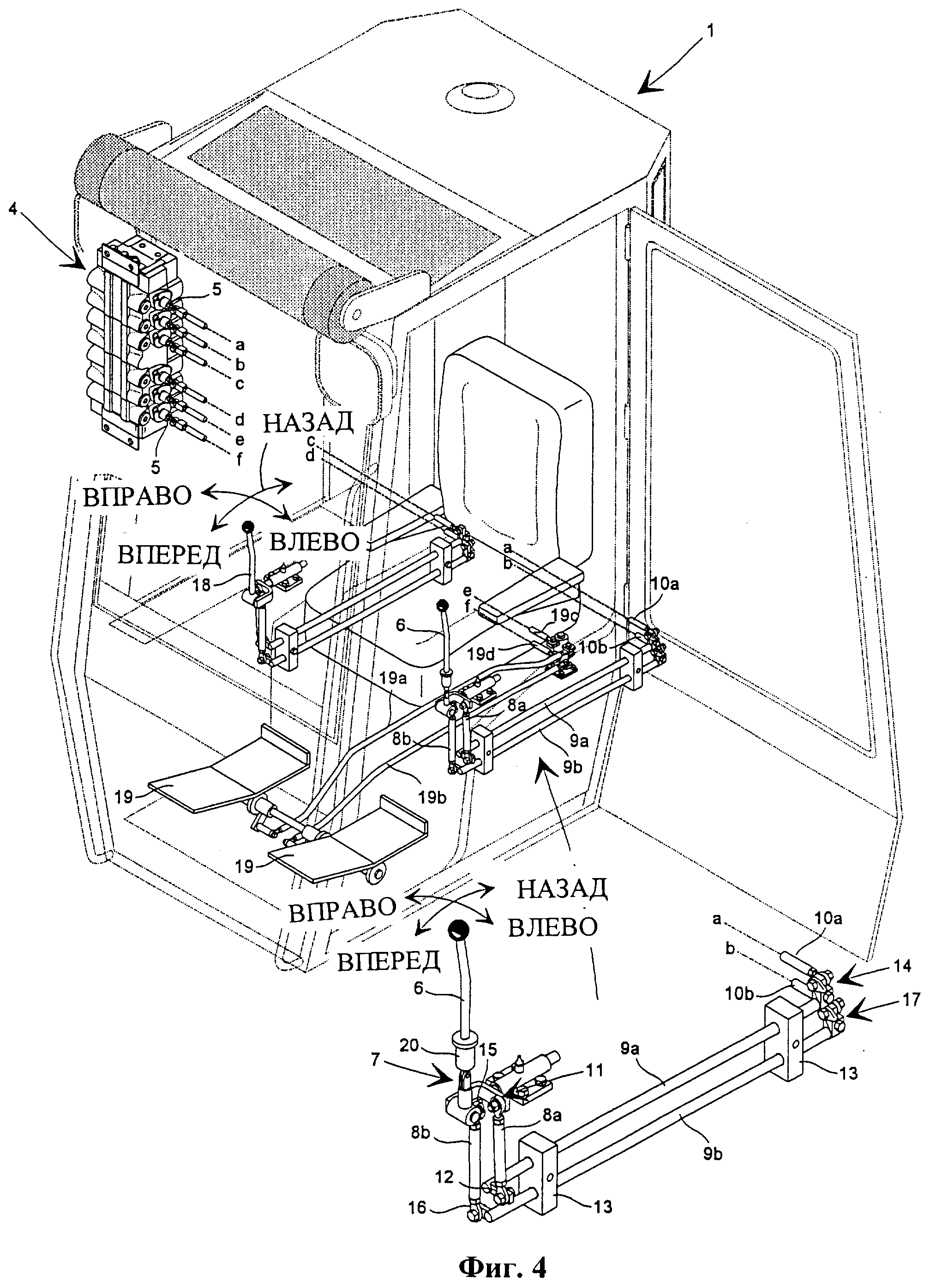
Фиг.4 - общий вид в большем масштабе рабочего места управления крана, согласно Фиг.1-3, и система управления.
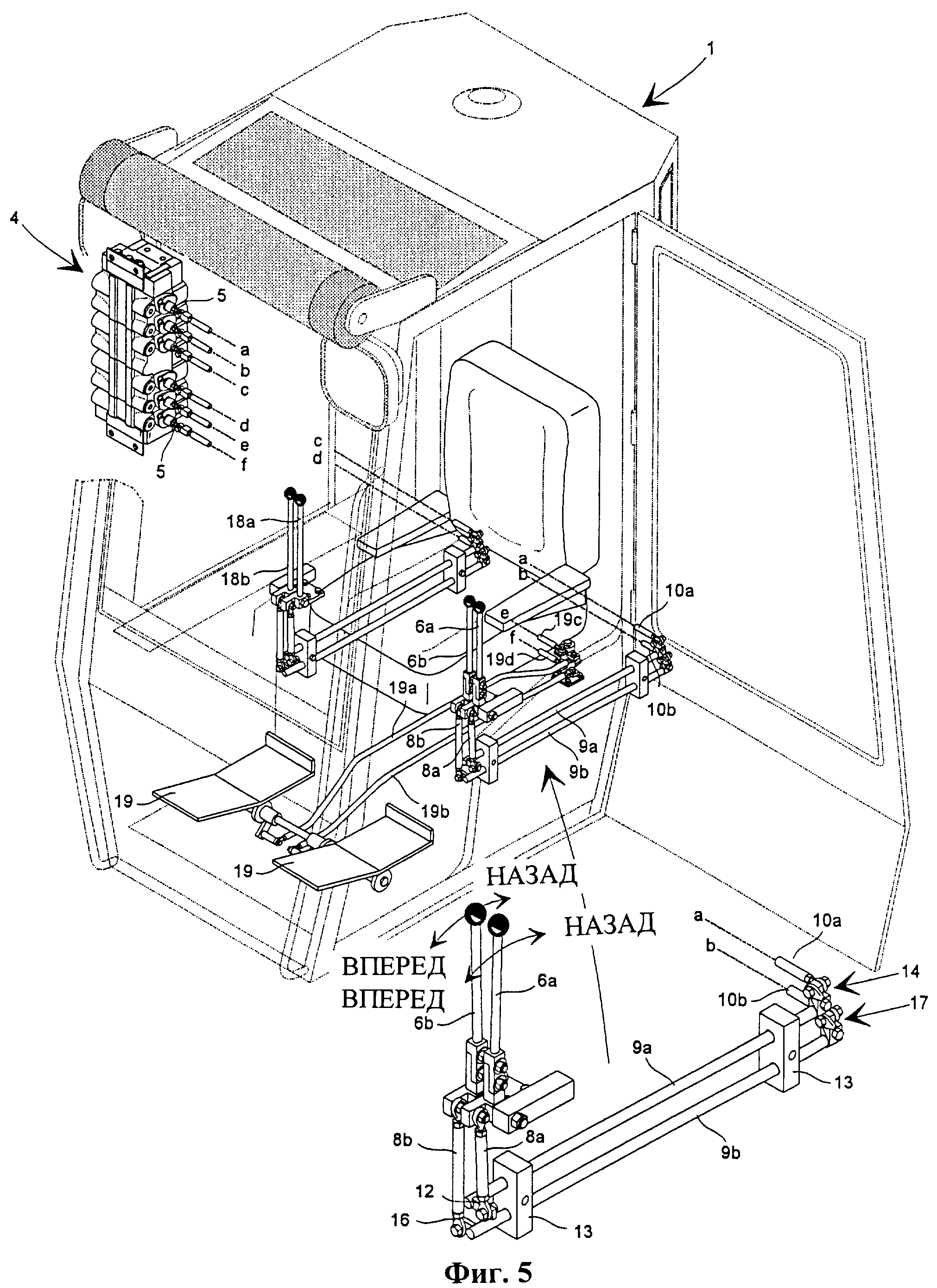
Фиг.5 - общий вид в большем масштабе рабочего места управления крана, согласно Фиг.1-3, и система управления другого варианта воплощения.
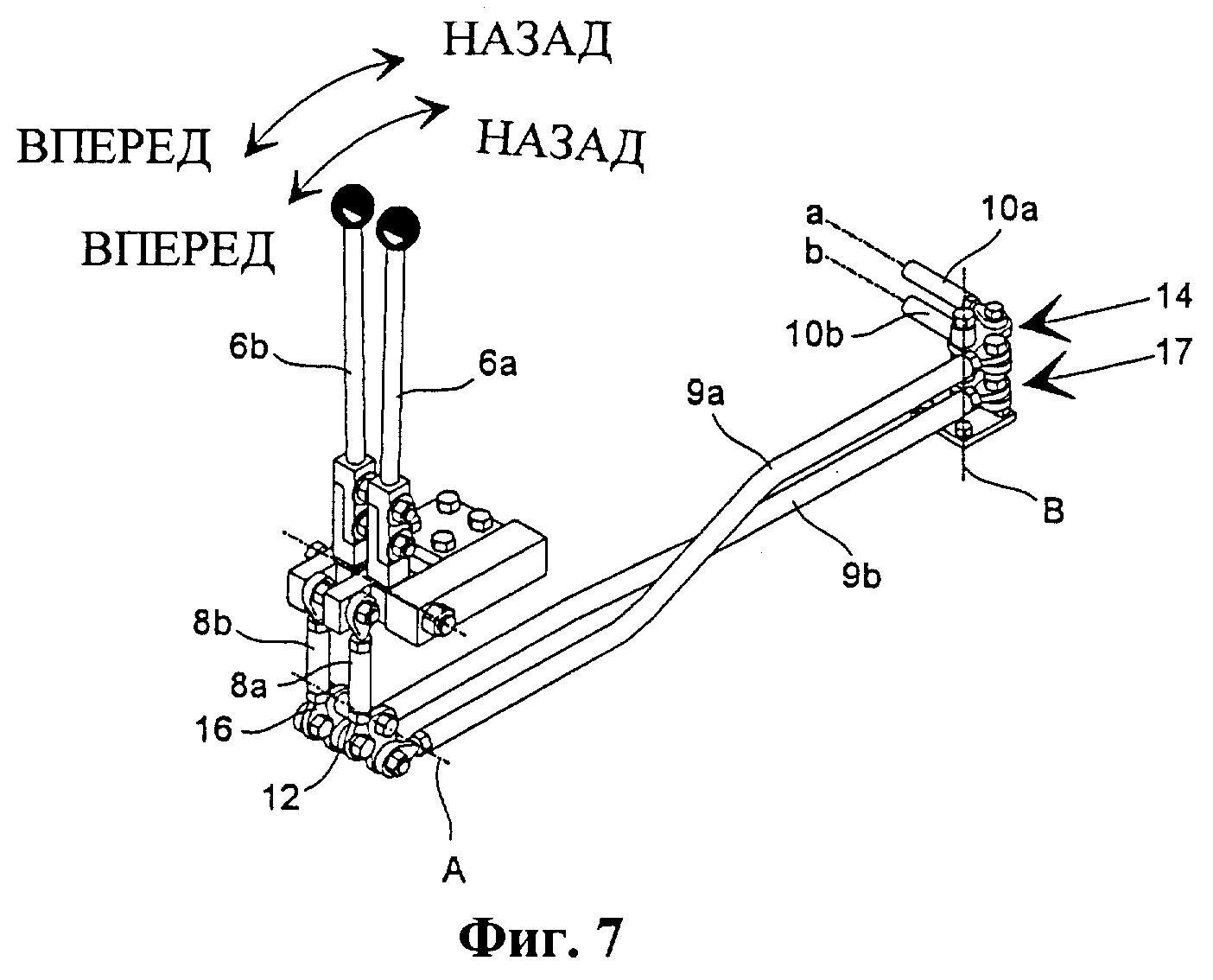
Фиг.6-8 иллюстрируют различные дополнительные варианты воплощения системы управления согласно Фиг.4 и 5.
На Фиг.1 - 3 с разных направлений показан погрузочный кран, например, лесопогрузочный кран. Такой кран может быть установлен на грузовом автомобиле, используемом, например, для перевозки древесины. На Фиг.1 - 3 показаны рабочее место управления 1 крана, система стрел 2, складывающиеся опоры 3 и клапанное устройство направления 4. Клапанное устройство направления 4 предназначено для передачи управляющих команд, задаваемых средством управления изнутри рабочего места управления, к приводам, например, системы стрел. Рабочее место управления 1 может представлять собой кабину управления или открытое рабочее место.
На Фиг.4 показан первый вариант воплощения изобретения, в котором система согласно данному изобретению содержит двухрычажное управление. С целью лучшего понимания на Фиг.4 не показаны система стрел и упоры крана, благодаря чему система управления согласно данному изобретению может быть представлена более четко.
Отличительными признаками настоящего изобретения являются расположение клапанного устройства направления 4 с наружной стороны рабочего места управления таким образом, что штоки 5 привода находятся по существу в горизонтальном положении, а средство управления является механической рычажно-приводной системой управления, приводимой в действие тягами. Приводимая в действие тягами механическая рычажно-приводная система управления содержит по крайней мере один рычаг управления 6, расположенный около сиденья рабочего места с возможностью поворота посредством фиксирующего шарнирного элемента 7 соответственно в положение “выключено” и “включено”. Кроме того, рычажно-приводная система управления содержит соединительные тяги, например, первую, вторую и третью соединительные тяги 8а, 8b, 9а, 9b, 10а, 10b, причем третьи соединительные тяги 10а, 10b соединены со штоками 5 привода клапанного устройства направления 4. Количество соединительных тяг зависит, естественно, от варианта воплощения изобретения. Рычаг управления и соединительные тяги соединены между собой соединительными средствами.
Система управления, показанная на Фиг.4, работает следующим образом. Для упрощения на Фиг.4 не показаны стойки и крепления, относящиеся к системе управления. Когда рычаг управления 6 передвигают влево, движение передается к соединительной тяге 8а, которая управляется шаровым шарниром 11, с которым соединен шаровой шарнир 12. Шаровой шарнир 12 также соединен с соединительной тягой 9а таким образом, чтобы продольное движение соединительной тяги 8а преобразовывалось в поворотное движение соединительной тяги 9а. Поворотное движение соединительной тяги 9а передается через опоры 13 на соединительный рычажный узел 14, связанный с третьей соединительной тягой 10а. Соединительный рычажный узел 14 преобразует поворотное движение второй соединительной тяги 9а в продольное движение третьей соединительной тяги. Третья соединительная тяга соединена с тем штоком 5 привода клапанного устройства направления 4, который обеспечивает левый поворот и который показан на Фиг.4 как шток 5а привода. Шток привода вытягивается наружу благодаря движению соединительной тяги 10а в результате поворота рычажного узла 14 налево, если смотреть сзади рабочего места управления.
Когда рычаг управления 6 толкают вперед, шаровой шарнир 15 поднимается вверх и передает движение посредством продольного движения соединительной тяги 8а к шаровому шарниру 16. Шаровой шарнир 16 преобразует это движение в поворотное движение соединительной тяги 9b, которое далее передается через опоры 13 на соединительный рычажный узел 17, который поворачивается налево, если смотреть сзади рабочего места управления, и вытягивает шток 5b привода наружу посредством движения соединительной тяги 10b, что заставляет систему стрел выдвигаться. Продольные движения соединительных тяг представляют собой прямые и реверсивные движения, и поворотные движения также являются прямыми и реверсивными движениями в зависимости от направления движения рычага управления.
Второй рычаг управления 18 действует аналогичным образом. Движения педалей 19 передаются посредством тяг 19а - 19d механической рычажной системы на штоки 5 привода клапанного устройства направления 4 таким же образом. Посредством фиксирующего шарнирного элемента 7 рычаг управления 6 может быть сложен в горизонтальное положение “выключено” и вертикальное положение “включено”, как это описано выше. Запирание выполняется, например, посредством направляющей втулки 20, которая в нижнем положении фиксирует шарнирный элемент так, что рычаг управления не способен складываться в горизонтальное положение. Движения рычагов управления помечены на чертеже стрелками.
На Фиг.5 показан второй вариант воплощения системы управления согласно данному изобретению. В этом варианте используется четырехрычажное управление. В целом, выполнение и работа устройства, показанного на Фиг.5, аналогичны описанным выше со ссылками на Фиг.4. Единственным отличием является то, что управляющие команды в варианте воплощения системы управления на Фиг.5 вырабатываются четырьмя рычагами управления, в то время как вариант воплощения на Фиг.4 использует два рычага. На Фиг.5 используются те же самые позиции, что и на Фиг.4, для обозначения одинаковых деталей. В варианте воплощения на Фиг.5 рычаги управления 6а, 6b и 18а, 18b движутся только назад и вперед.
На Фиг.6-8 показаны различные дополнительные варианты воплощения системы управления в соответствии с Фиг.4 и 5. Фиг.6 иллюстрирует вариант воплощения двухрычажной системы управления, причем на Фиг.6 показан только один рычаг управления. В варианте воплощения на Фиг.6 тяги 8а и 8b направлены вниз таким же образом, как и в варианте воплощения на Фиг.4. Прямое и реверсивное движение тяг 8а и 8b передается на тяги 9а и 9b посредством рычагов, поворачивающихся вокруг горизонтальной оси А, показанной штрихпунктирной линией. Из этого варианта воплощения следует, что тяги 9а и 9b движутся взад и вперед, а в варианте воплощения на Фиг.4 они поворачиваются вокруг продольной оси.
Прямое и реверсивное движение тяг 9а и 9b далее передается на тяги 10а и 10b посредством рычагов, поворачивающихся вокруг вертикальной оси В.
Фиг.7 иллюстрирует дополнительный вариант воплощения четырехрычажной системы управления в соответствии с Фиг.5 таким же образом, как и на Фиг.6, где движение тяг 9а и 9b является прямым и реверсивным продольным движением вместо поворотного движения, как в варианте воплощения на Фиг.5. Детали варианта воплощения, показанного на Фиг.7, соответствуют деталям варианта воплощения на Фиг.6.
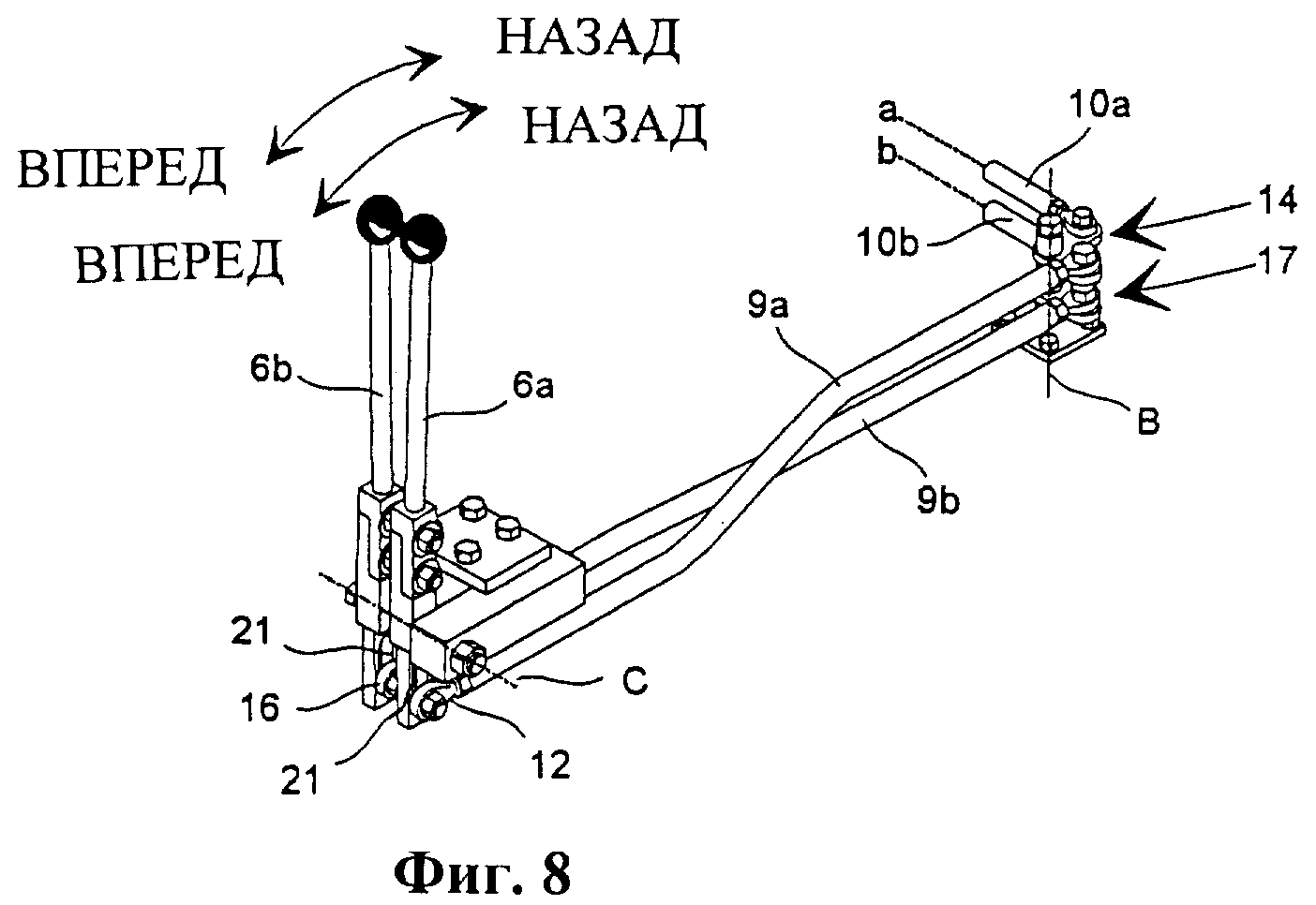
На Фиг.8 показано простое дополнение к варианту воплощения на Фиг.7. В варианте воплощения на Фиг.8 звенья 12 и 16 непосредственно связаны с концами рычагов управления под горизонтальной осью С, показанной штрихпунктирной линией. Ясно, что звенья могут располагаться также над этой осью. В этом варианте воплощения тяги 9а и 9b также движутся взад и вперед. Нижние концы рычагов 6а и 6b управления на Фиг.8 содержат прорези 21 для звеньев 12, 16. Расположение концов тяг 9а и 9b относительно горизонтальной оси С может быть отрегулировано перемещением звеньев 12 и 16 в их прорезях. В результате появляется регулируемое передаточное число системы стрел. Если оператору требуется точное движение крана и подъемных средств, звенья могут быть подвинуты ближе к горизонтальной оси, что дает возможность уменьшить величину перемещения тяг 9а, 9b, 10а, 10b, которые производят настройку клапанного устройства направления относительно движения рычага управления. С другой стороны, если требуется скорость, то звенья 12 и 16 раздвигаются дальше от горизонтальной оси, что дает возможность увеличить величину перемещения тяг, которые производят настройку клапанного устройства направления относительно движения рычага управления.
Вышеописанные варианты воплощения данного изобретения никак не ограничивают его исполнение, изобретение может быть модифицировано полностью в объеме формулы изобретения. Поэтому ясно, что варианты воплощения данного изобретения или его деталей не обязательно должны точно соответствовать проиллюстрированным на чертежах, возможны также другие варианты воплощения. Хотя на чертежах показан кран, у которого рабочее место управления находится слева, если смотреть сзади, ясно, что в объеме данного изобретения рабочее место управления может быть также расположено справа от крана. Кроме того, ясно, что, поскольку соединительные тяги проходят через стенки кабины управления, необходимо, чтобы кабина управления была изолирована снаружи от звуков клапанного устройства направления, а изнутри для сохранения тепла. Изоляция, естественно, может быть выполнена многими различными способами.
Реферат
Изобретение относится к конструкциям систем управления погрузочными кранами. В системе управления, содержащей рабочее место оператора, клапанное устройство управления гидравлической системой крана и средство управления, являющееся механической рычажно-приводной системой, включающей в себя, по крайней мере, один рычаг управления, тяги и шаровые шарниры, упомянутое клапанное устройство расположено с наружной стороны и сбоку от рабочего места управления. Штоки привода этого клапанного управления находятся в горизонтальном положении. Согласно первому варианту выполнения системы одни из тяг преобразуют их продольное движение в поворотное движение других тяг, которые через соединительный рычажный узел передают движение штоку привода клапанного устройства для выдвижения системы стрел. Второй вариант выполнения системы отличается от первого варианта тем, что осуществляется продольное движение тяг, которые в первом варианте выполнения системы поворачивались. Третий вариант выполнения системы отличается тем, что концы рычагов управления имеют прорези для шарниров, в которых эти шарниры могут перемещаться. Изобретение обеспечивает повышение удобства эксплуатации. 3 с. и 3 з.п. ф-лы, 8 ил.

Комментарии