Способ регулирования скорости вращения двигателя привода грузоподъемного устройства, выполненного с возможностью скоростного управления, и привод грузоподъемного устройства - RU2464222C2
Код документа: RU2464222C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу регулирования скорости вращения двигателя привода грузоподъемного устройства, выполненного с возможностью управления скоростью вращения.
Уровень техники
Когда производится подъем груза с земли, и сам груз, и конструкция, несущая нагрузку, испытывают вибрации в вертикальном направлении. Причиной вертикальной вибрации, главным образом, является динамическая нагрузка ударного типа, которая возникает, когда груз резко, с высокой скоростью подъема отрывают от земли.
Динамическую нагрузку можно снизить, если при отрыве груза от земли скорость подъема поддерживать на низком уровне. Опытный оператор грузоподъемного устройства может применять этот способ вручную, снижая скорость подъема в тот момент, когда груз отрывается от земли.
Известным приемом является оснащение привода грузоподъемного устройства контроллером, выполненным с возможностью определения натяжения троса и момента, когда груз оказывается в воздухе, путем слежения за изменением усилия на тросе во времени, т.е. производной по времени от усилия троса. Когда производная по времени от усилия троса становится чересчур большой, производится снижение скорости подъема. Когда производная по времени от усилия троса становится достаточно малой, производится обратное увеличение скорости подъема до первоначального значения. Такой контроллер обеспечивает вполне приемлемые результаты с двухскоростными приводами грузоподъемных устройств.
Проблема устранения динамических нагрузок путем контроля производной по времени заключается в том, что данный способ не очень хорошо подходит для приводов грузоподъемных механизмов, выполненных с возможностью управления скоростью, в которых скорость подъема может принимать любые значения от минимальной до максимальной.
Раскрытие изобретения
Таким образом, задача настоящего изобретения состоит в создании способа регулирования скорости вращения двигателя привода грузоподъемного устройства, выполненного с возможностью управления скоростью, а также в создании привода грузоподъемного устройства, в котором проявления указанной проблемы ослаблены. Задача изобретения решается посредством способа и привода грузоподъемного устройства, отличительные признаки которых изложены в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления изобретения изложены в зависимых пунктах формулы.
Идея, лежащая в основе изобретения, заключается в использовании производной фактической величины усилия на тросе по положению для формирования конечной команды на установку скорости для привода грузоподъемного устройства, выполненного с возможностью управления скоростью. Под производной усилия на тросе по положению понимается изменение усилия на тросе, отнесенное к положению некоторого элемента грузоподъемного механизма.
Преимущество изобретения состоит в том, что контроль производной фактической величины усилия на тросе по положению дает более надежную информацию на этапах подъема груза, чем контроль производной усилия на тросе по времени. Изобретение пригодно для применения, например, с целью обнаружения факта отрыва груза от земли или для обнаружения факта подтягивания (увеличения натяжения) троса.
Краткое описание чертежей
Варианты выполнения настоящего изобретения будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1 схематически изображает привод грузоподъемного устройства, соответствующий настоящему изобретению, и
фиг.2 представляет результаты моделирования процесса подъема груза приводом грузоподъемного устройства фиг.1.
Осуществление изобретения
На фиг.1 изображен привод грузоподъемного устройства, содержащий трос 2, соединенный с тросом грузоподъемный элемент 4, двигатель 6 с регулируемой частотой вращения, который функционально связан с тросом 2 с целью подъема груза 8 посредством грузоподъемного элемента 4, и контроллер 10 грузоподъемного устройства. Контроллер 10 грузоподъемного устройства выполнен с возможностью приема команды



Привод грузоподъемного устройства содержит средства для определения фактической величины F усилия на тросе, которое передается тросу 2, и средства для определения положения грузоподъемного элемента 4. Средства для определения фактической величины F усилия на тросе могут содержать тензометрический датчик, соединенный с точкой крепления троса 2. Данные фактической величины F усилия на тросе передаются в контроллер 10 грузоподъемного устройства. Средства для определения положения грузоподъемного элемента 4 могут содержать импульсный датчик двигателя 6. Импульсный датчик выдает данные nm, связанные с вращением двигателя 6, которые передаются в контроллер 10 грузоподъемного устройства. Контроллер 10 грузоподъемного устройства определяет положение грузоподъемного элемента 4, используя в качестве исходной информации данные nm, связанные с вращением двигателя 6, а также известное передаточное отношение вращения двигателя 6 и положения грузоподъемного элемента 4.
Контроллер 10 грузоподъемного устройства выполнен с возможностью определения производной dF/dz фактической величины усилия на тросе по положению, используя в качестве исходной информации данные F фактического усилия на тросе и данные положения грузоподъемного элемента 4. Таким образом, производная dF/dz фактической величины усилия на тросе по положению описывает изменение фактической величины F усилия на тросе в зависимости от изменения положения z грузоподъемного элемента 4. Контроллер 10 грузоподъемного устройства также выполнен с возможностью контроля производной dF/dz фактической величины усилия на тросе по положению, которая была определена, и на основе этого - управления скоростью вращения двигателя 6. Привод грузоподъемного устройства использует данные производной dF/dz фактической величины усилия на тросе по положению для осуществления наблюдения за различными этапами процесса подъема груза.
Контроллер 10 грузоподъемного устройства свидетельствует о подтягивании (увеличении натяжения) троса 2, когда выполняются предварительно заданные условия. Условия, на основании которых отмечается подтягивание троса, включают в себя превышение заданного предельного значения dFz,IL производной усилия на тросе по положению для динамической нагрузки и превышение предельного значения FIL усилия на тросе для динамической нагрузки. Контроллер 10 грузоподъемного устройства выполнен с возможностью снижения величины конечной команды

В ситуациях, когда не отмечается никакого подтягивания троса 2, предусмотрено, что контроллер 10 грузоподъемного устройства формирует конечную команду

В контроллере 10 грузоподъемного устройства в качестве одного из условий констатации факта подтягивания троса 2 используется превышение предельного значения FIL усилия на тросе для динамической нагрузки. Так сделано, например, потому, что данная процедура позволяет избежать ложного определения подтягивания троса 2 в ситуации ошибочного определения производной dF/dz фактической величины усилия на тросе по положению. Таким образом, использование факта превышения предельного значения FIL усилия на тросе для динамической нагрузки в качестве условия для индикации подтягивания троса является вспомогательной мерой. В одном из вариантов осуществления изобретения заданные условия, на основании которых констатируется факт подтягивания троса, заключаются в превышении предельного значения dFzIL. производной усилия на тросе по положению для динамической нагрузки, но не включают превышение предельного значения FILусилия на тросе для динамической нагрузки.
Контроллер 10 грузоподъемного устройства констатирует отрыв груза от земли в тот момент времени, который следует за обнаружением подтягивания троса, и в тот момент времени, когда производная dF/dz фактической величины усилия на тросе по положению падает ниже установленного предельного значения dFz,LO для отрыва груза. Для предельных значений производной усилия на тросе по положению применимо неравенство dFz,IL>dFz,LO>0. В ответ на обнаружение отрыва груза от земли контроллер 10 грузоподъемного устройства увеличивает величину конечной команды
Предельное значение dFz,LO производной по положению для отрыва груза - это исходная информация, конкретная для привода грузоподъемного устройства, которую заранее заносят в контроллер 10 грузоподъемного устройства. Предельное значение dFz,IL производной усилия на тросе по положению для динамической нагрузки, предельное значение FIL усилия на тросе для динамической нагрузки и предельная величина ωIL команды скорости для динамической нагрузки также представляют собой исходную информацию, конкретную для привода грузоподъемного устройства.
В одном из вариантов осуществления настоящего изобретения для определения факта отрыва груза от земли используется только производная dF/dz фактической величины усилия на тросе по положению, т.е. факт отрыва груза от земли констатируется, когда значение производной dF/dz фактической величины усилия на тросе по положению падает ниже установленного предельного значения dFz,LO для отрыва груза. В данном варианте осуществления факт подтягивания троса определяется по другой величине, нежели по производной dF/dz фактической величины усилия на тросе по положению. Факт подтягивания троса может определяться по превышению установленного предельного значения FIL усилия на тросе для динамической нагрузки.
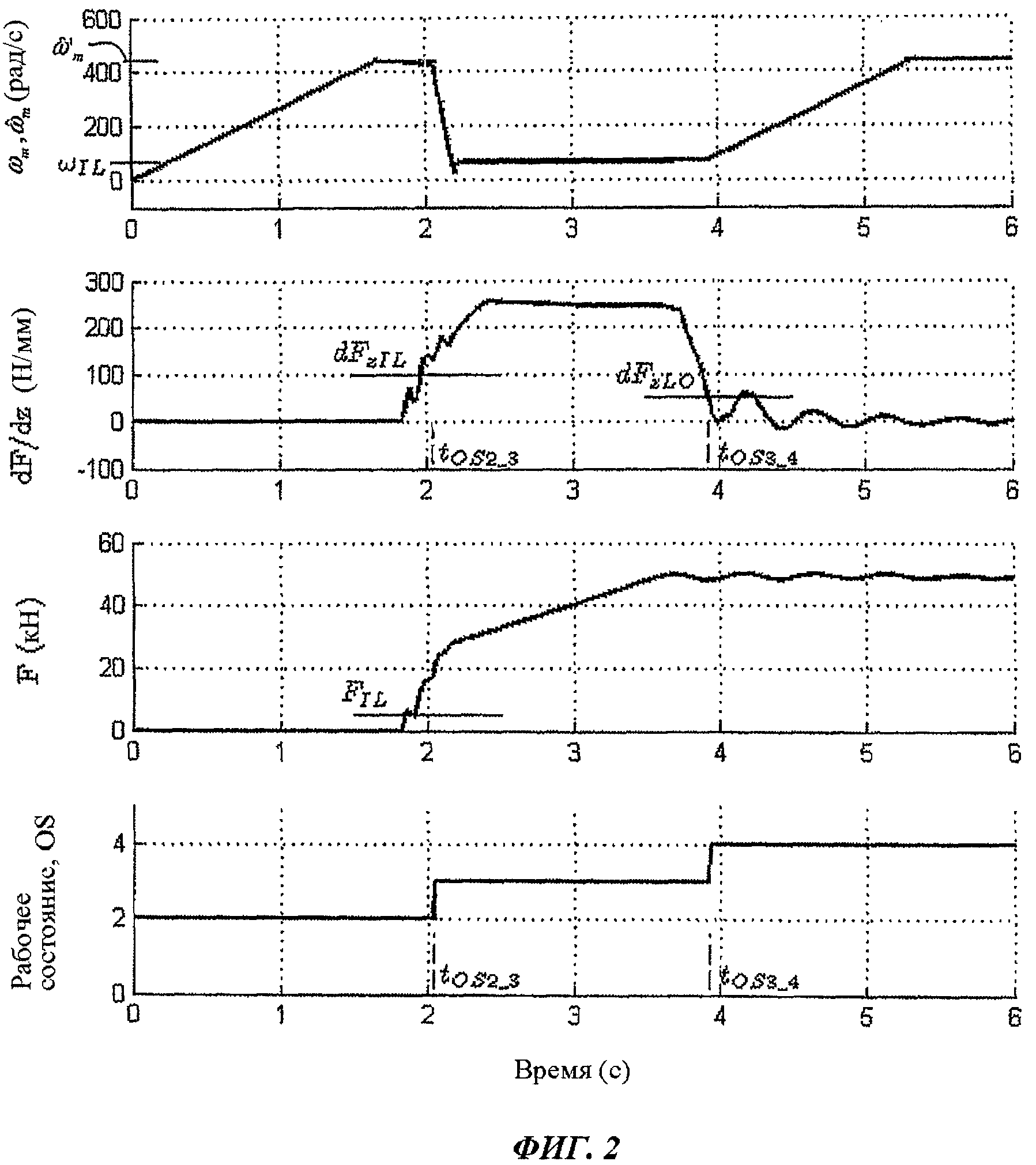
На фиг.2 показаны четыре графика, построенные в результате моделирования процесса подъема груза приводом грузоподъемного устройства фиг.1. На первом графике представлена конечная команда
В момент времени t=0, когда значение конечной команды

В момент

Когда зарегистрировано подтягивание троса 2, контроллер 10 грузоподъемного устройства начинает уменьшать величину конечной команды


Теоретически, когда контроллер 10 грузоподъемного устройства обнаруживает подтягивание троса, величину конечной команды
Из второго и третьего графиков фиг.2 видно, что и фактическая величина F усилия на тросе, и производная dF/dz фактической величины усилия на тросе по положению после момента

Условия для констатации факта отрыва груза от земли оказываются выполненными в момент



Из первого графика фиг.2 видно, что скорость ωm вращения двигателя 6 с регулируемой частотой вращения сравнительно жестко следует за конечной командой
Четвертый график фиг.2 показывает рабочее состояние OS привода грузоподъемного устройства в различные моменты времени. Вначале привод грузоподъемного устройства находится в рабочем состоянии OS2, при котором контроллер 10 грузоподъемного устройства полагает, что грузоподъемный элемент 4 не загружен. В момент tOS2_3времени привод грузоподъемного устройства совершает переход из рабочего состояния OS2 в рабочее состояние OS3, при котором контроллер 10 констатирует факт подтягивания троса 2. В момент
При моделировании процесса подъема груза, показанного на фиг.2, команда
Поскольку соответствующий изобретению способ позволяет автоматически избегать опасных динамических нагрузок, команда скорости подъема, подаваемая в контроллер грузоподъемного устройства, в момент отрыва груза от земли может быть даже равна максимально допустимой скорости вращения двигателя привода грузоподъемного устройства. Таким образом, оказывается возможным подъем груза с земли производить плавно независимо от опыта и профессиональных навыков оператора привода грузоподъемного устройства. Вот почему соответствующий изобретению способ также хорошо подходит и для автоматических грузоподъемных устройств.
На фиг.1 в качестве грузоподъемного элемента 4 выступает подъемный крюк. В других вариантах осуществления изобретения грузоподъемным элементом может служить любой элемент, позволяющий захватывать груз, например подъемный анкер, вилочный захват или магнитный подъемный элемент.
Положение грузоподъемного элемента 4, которое выше обозначалось буквой z, во многих случаях относится к вертикальному направлению. Однако понятно, что использование изобретения никоим образом не ограничивается вариантами, где груз перемещается только в вертикальном направлении.
Для специалистов в данной области должно быть понятно, что основную идею изобретения можно осуществить множеством различных способов. Таким образом, изобретение и варианты его осуществления не ограничиваются вышеприведенными примерами, а в форму и детали осуществления изобретения могут быть внесены изменения, не выходящие за границы идеи и объема изобретения.
Реферат
Изобретение относится к области подъемников и предназначено для регулирования скорости вращения двигателя привода грузоподъемного устройства. При регулировании скорости принимают команду скорости подъема, формируют конечную команду скорости на основе исходной информации, содержащей команду скорости подъема, используют конечную команду скорости в качестве инструкции для задания скорости вращения двигателя (6) привода грузоподъемного устройства. Осуществляют контроль производной (dF/dz) фактической величины усилия на тросе по положению. Исходная информация содержит указанную производную (dF/dz) фактической величины усилия на тросе по положению. Привод грузоподъемного устройства содержит трос (2), грузоподъемный элемент (4), соединенный с тросом (2), двигатель (6), контроллер (10). Достигается регулирование скорости вращения двигателя привода грузоподъемного устройства. 2 н. и 8 з.п. ф-лы, 2 ил.
Формула




Комментарии