Устройство и способ управления раскачиванием груза, подвешенного на подъемном устройстве - RU2676210C1
Код документа: RU2676210C1
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение касается устройства и способа управления раскачиванием груза, подвешенного с помощью троса или цепи подъемного устройства, такого как мостовые краны, краны, используемые в строительстве, автокраны и аналогичные устройства для подъема и перемещения грузов.
Уровень техники
Как известно, мостовые краны представляют собой машины, предназначенные для подъема и перемещения материалов и товаров, как в помещениях, так и вне помещений, и обычно содержат мост, подвижный в горизонтальном направлении вдоль пары рельсов, и снабженный поперечным элементом, на котором установлена тележка, тележка содержит таль, который может перемещаться по горизонтали вдоль поперечного элемента. С талью соединена лебедка, лебедка содержит захватывающий элемент, например крюк, для захвата и подъема объектов.
Лебедка содержит один или несколько прикрепленных к ней тросов, которые через систему талей, передач и крюков позволяют поднимать и перемещать грузы.
Одна из основных проблем, связанных с использованием этих агрегатов, а также, в целом, касающаяся подъемного устройства с тросами или цепями, состоит в гарантировании полной безопасности операторов во время использования подъемного устройства, также с учетом больших перемещаемых весов.
Решение этих проблем было предложено в устройстве, описанном в итальянских патентах IT 1386901 и IT 1387564, ссылки на которые сделаны для получения дополнительной информации.
Описанное в этом документе устройство защиты для подъемного устройства содержит средство определения смещения от вертикали по меньшей мере одного троса, который поддерживает захватывающий элемент для груза.
Один вариант осуществления изобретения содержит использование группы акселерометров, каждый из которых способен определить смещение захватывающего груз элемента относительно соответствующей оси декартовых координат.
В частности, акселерометры расположены на неподвижной оконечной муфте троса, то есть в точке, где трос, поддерживающий захватывающий груз элемент, зафиксирован и не движется, то есть не перемещается.
Со средством определения смещения по вертикали может быть связано акустическое и/или визуальное средство предупреждения или средство остановки операций подъема или перемещения, которое способно начать функционировать, если смещение троса от вертикали превышает, по меньшей мере, заранее заданный порог.
Другое решение описано в итальянском патенте IT 1393950, ссылка на который сделана для получения дополнительной информации.
Если коротко, упомянутые выше документы касаются системы, предоставляющей возможность комплексного управления подъемными агрегатами, упомянутые системы называют «Сервисами (CIMS) комплексного управления кранами».
Система позволяет определять и вносить в каталог данные, касающиеся компонентов подъемного агрегата, с целью увеличения его безопасности, например, для того, чтобы иметь возможность ясным и простым для клиентов образом управлять операциями технического обслуживания.
Например, с помощью системы определения с акселерометром, расположенной на подъемном устройстве, могут быть определены данные, касающиеся смещений захватывающего груз элемента, данные, касающиеся смещений захватывающего груз элемента по меньшей мере по одной оси декартовых координат, и/или данные, касающиеся единичных событий или исторических наборов событий подъемного устройства.
Система позволяет, помимо прочего, увеличить эффективность управления при техническом обслуживании, особенно во всех промышленных ситуациях, когда присутствует несколько агрегатов.
Собранные данные могут быть непосредственно доступны в сети, без использования программ, установленных на ПК, что позволяет получить максимальную доступность с любой интернет-станции.
Тем не менее, несмотря на тот факт, что мостовой кран является подъемным устройством, подпадающим под конкретные нормы, как в плане конструкции, так и касающиеся периодических проверок, остаются нерешенными следующие технические проблемы, по существу, связанные с безопасностью операторов, использующих устройство.
Одна из этих проблем описывается тем фактом, что существующие в технике устройства, хотя и способные определить смещение груза относительно вертикали, это определение осуществляют, по существу, с целью предоставить оператору возможность принять надлежащие решения в случае излишнего смещения. Тем не менее, они активно не работают над минимизацией или, в любом случае, над уменьшением раскачивания груза во время операций мостового крана.
Аналогично, хотя существуют теоретические исследования, которые посвящены проблемам, касающимся раскачивания груза в подъемном устройстве, эти исследования, в целом, основаны на моделировании или лабораторных прототипах и, в целом, не учитывают, в отношении норм и других элементов, потребности, возникающие в промышленности, например, из-за присутствия оператора и направленных им команд.
Еще одно устройство описано в документе US 2005/103738, в котором описано несколько вариантов осуществления системы для управления раскачиванием груза.
В некотором типовом варианте осуществления такой известной системы управления предусмотрено две инерциальные платформы.
Первая инерциальная платформа соединена с целью измерения ускорения первого объекта, такого как груз, подвешенного на втором объекте, таком как тележка, при этом в первой инерциальной платформе вырабатывают первый сигнал, отражающий ускорение первого объекта.
Вторая инерциальная платформа соединена с целью измерения ускорения второго объекта, при этом во второй инерциальной платформе вырабатывают второй сигнал, отражающий ускорение второго объекта.
Устройство из US 2005/103738 дополнительно содержит процессор, связанный с первой и второй инерциальными платформами, процессор приспособлен для определения колебания первого объекта относительно второго объекта на основе, по меньшей мере частично, первого и второго сигналов, колебание представляет относительное смещение первого объекта относительно второго объекта.
Раскрытие изобретения
Следовательно, задача настоящего изобретения заключается в том, чтобы предложить устройство и способ для управления и стабилизации колебаний груза, как во время обычных операций, так и из-за этапов резкого торможения или ускорения.
Еще одна задача изобретения заключается в том, чтобы предложить применимые в промышленности устройство и процедуру управления.
Не последняя задача различных реализаций изобретения состоит в том, чтобы предложить процедуру управления стабильностью мостового крана, в которой используют доступные на сегодня возможности вычислений.
Задачи изобретения решены в устройстве управления раскачиванием груза, подвешенного на снабженном двигателем подвижном элементе, который может перемещаться вдоль по существу горизонтальной оси, при этом устройство управления содержит блок управления и инерциальную платформу, причем инерциальная платформа способна определять характерные значения угла наклона троса, который поддерживает груз, относительно вертикали и снабжена средством передачи этих значений в блок управления, при этом блок управления способен так обработать эти значения, характеризующие угол наклона троса относительно вертикали, чтобы рассчитать и передать управляющие действия, направленные на динамическое изменение скорости снабженного двигателем подвижного элемента, в зависимости от желаемого угла наклона троса относительно вертикали.
Преимущество этого варианта осуществления изобретения заключается в том, что он позволяет воздействовать на подвижный элемент подъемного устройства одновременно с перемещениями груза, при этом задача заключается в уменьшении раскачивания и поддержании подвешенного груза насколько возможно близко к желаемому положению.
В еще одном варианте осуществления изобретения инерциальная платформа способна определить углы отклонения груза относительно вертикали в двух взаимно перпендикулярных углах отклонения, определяющих оси перемещения для соответствующих снабженных двигателями подвижных элементов подъемного устройства, при этом блок управления способен обработать эти значения с целью рассчитать и передать действия, управляющие двигателем, для минимизации раскачивания груза.
Преимущество этого варианта осуществления изобретения заключается в том, что он позволяет одновременно работать над подвижными элементами, функционирующими во взаимно перпендикулярных направлениях, таких как, например, в случае мостового крана, для тележки и моста, с целью уменьшения раскачивания подвешенного груза и поддерживания его насколько возможно близко к желаемому положению в пространстве.
В еще одном варианте осуществления изобретения инерциальная платформа содержит акселерометр и гироскоп.
Преимущество этой реализации состоит в том, что она позволяет определить информацию о положении груза и, путем объединения данных акселерометра с данными гироскопа, измерять угол отклонения груза с алгебраическим знаком с целью точного определения положения груза, а также позволяет рассчитать динамические параметры, такие как, например, скорость и угловое ускорение.
В еще одном варианте осуществления изобретения инерциальная платформа расположена на неподвижной оконечной муфте троса или цепи, поддерживающей захватывающий груз элемент.
Преимущество этого варианта осуществления изобретения заключается в том, что он позволяет точно измерять физические значения, измеряемые инерциальной платформой, при этом на положение не будут оказывать влияние перемещения узлов подъемного устройства, таких как, например, блоки, которые свободно перемещаются на соответствующих тросах.
В еще одном варианте осуществления изобретения с блоком управления может быть связан дистанционный блок обработки.
Преимущество этого варианта осуществления изобретения заключается в том, что с использованием дистанционного блока обработки он позволяет использовать данные, обработанные в блоке управления с помощью программного обеспечения управления и конфигурации системы, а также программы постобработки, и для сопряжения с CIMS платформой и сопряжения с другими системами обработки данных, например, PLC, PC и подобными.
Изобретение дополнительно содержит подъемное устройство, содержащее инерциальную платформу, которую возможно связать с устройством управления, способным воздействовать на подъемное устройство.
Еще один вариант осуществления настоящего изобретения касается способа управления раскачиванием груза, подвешенного с помощью подъемного устройства, при этом указанный способ включает в себя следующие этапы, на которых:
- отслеживают характерное значение угла наклона троса, который поддерживает груз, относительно вертикали;
- определяют разность между отслеженным углом наклона и желаемым углом наклона с целью уменьшить или исключить эту разность;
- рассчитывают управляющее действие, которое необходимо применить к по меньшей мере одному из двигателей снабженных двигателями подвижных элементов;
- применяют управляющее действие к по меньшей мере одному из двигателей снабженных двигателями подвижных элементов в зависимости от желаемого угла наклона троса относительно вертикали.
В еще одном варианте осуществления изобретения этап расчета управляющего действия осуществляют с учетом изменений расстояния от груза до подвижного элемента подъемного устройства.
Преимущество этого варианта осуществления изобретения заключается в том факте, что он позволяет воздействовать на все подъемное устройство, в котором груз может подвергаться значительным перемещениям, проходя от низкого положения до высокого положения, например, с помощью воздействия тали или лебедки, способных поднять или опустить груз.
В еще одном варианте осуществления изобретения этап расчета и этап применения рассчитанного управляющего действия осуществляют независимо для каждого приведения в действие подвижного элемента подъемного устройства.
Преимущество этого решения заключается в том, что оно упрощает как расчет управляющего действия, так и его практическую реализацию.
Различные аспекты этого процесса могут быть выполнены с помощью компьютерной программы, содержащий исходный код, реализующий этапы этого способа. Компьютерная программа может быть заложена, например, в память, связанную с блоком управления.
Краткое описание чертежей
Другие характеристики и достоинства изобретения будут ясны после прочтения описания, приведенного ниже с помощью не ограничивающего изобретение примера со ссылками на приложенные чертежи.
На фиг. 1 показан вид в перспективе мостового крана, в котором применено устройство управления, соответствующее варианту осуществления настоящего изобретения;
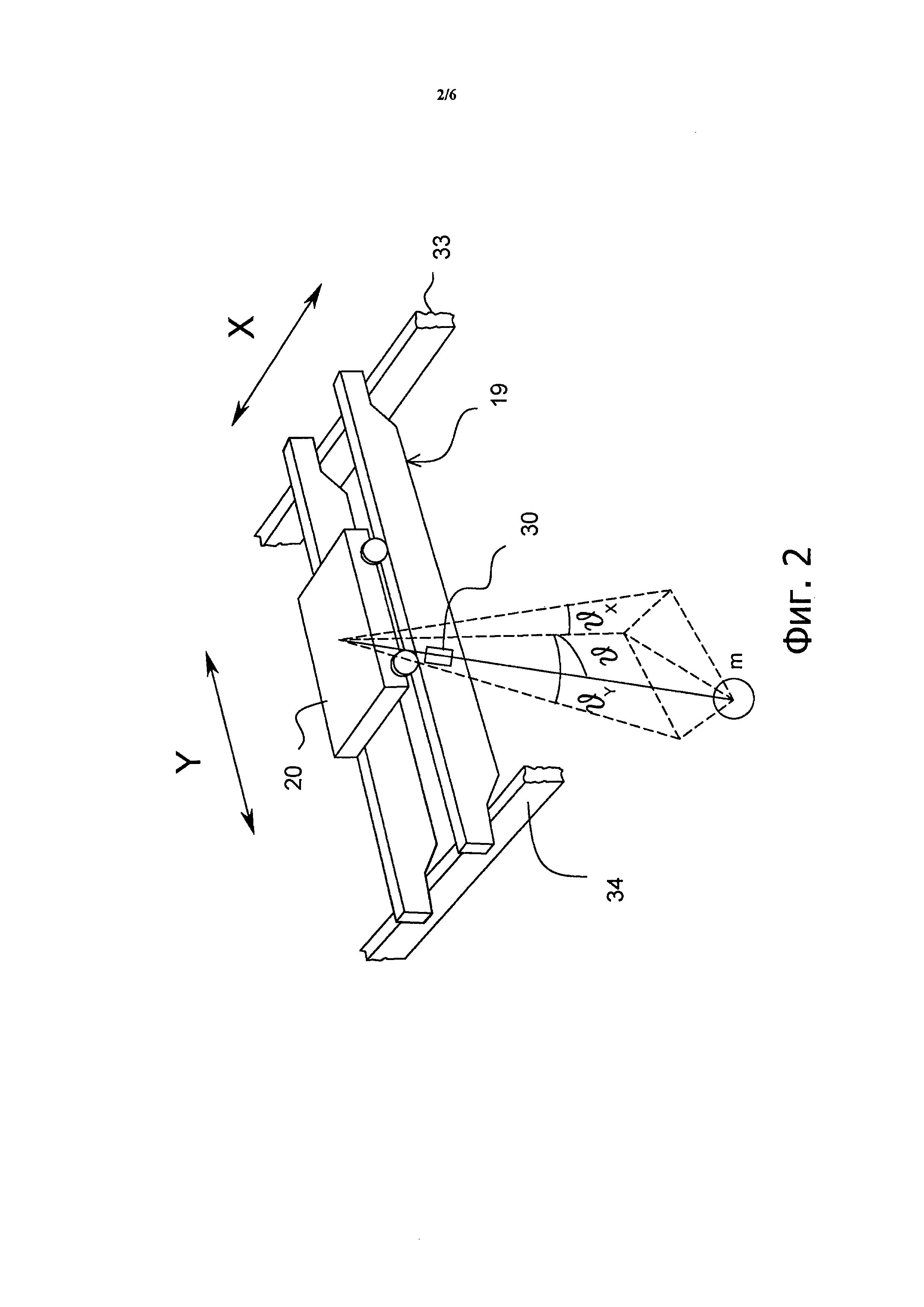
на фиг. 2 - вид, схематически показывающий мостовой кран с фиг. 1;
на фиг. 3 - вид, схематически показывающий варианты осуществления устройства управления, соответствующего изобретению;
на фиг. 4 - вид, схематически показывающий некоторые характерные параметры системы управления, соответствующей изобретению;
на фиг. 5 - вид, показывающий структурную схему, касающуюся архитектуры варианта осуществления системы управления;
на фиг. 6 - вид, иллюстрирующий элемент измерения параметров, описывающих перемещение груза;
на фиг. 7 - вид, схематически показывающий, в одном измерении, некоторые характерные параметры системы управления, соответствующей изобретению; и
на фиг. 8 - вид, показывающий структурную схему, касающуюся архитектуры другого варианта осуществления системы управления.
Осуществление изобретения
Настоящее изобретение касается устройства и способа управления колебанием груза, подвешенного с помощью троса или цепи подъемного устройства, такого как мостовые краны, башенные краны, используемые в строительстве, автокраны и аналогичные устройства для подъема и перемещения грузов. Для простоты в описании будем ссылаться на мостовой кран.
На фиг. 1 схематично показан мостовой кран 10, содержащий мост 19, включающий в себя две взаимно параллельные балки 15, 16, причем мост 19 выполнен с возможностью перемещения вдоль первого направления, обозначенного X на фиг. 1, указанное перемещение возможно благодаря перемещению двух верхних элементов 13, 14 вдоль балок 33, 34.
Снабженная двигателем тележка 20 установлена на мосту 19, при этом тележка может перемещаться по двум рельсам 15', 16', каждый из которых расположен на соответствующей балке 15, 16 моста 19. Тележка 20 может перемещаться вдоль направления, которое перпендикулярно первому направлению X и которое обозначено через Y.
Мост 19 связан с двигателем 24, снабженным инвертером 24', который позволяет перемещать мост 19 вдоль оси X, как показано на фиг. 1, при этом снабженная двигателем тележка 20 связана с соответствующим двигателем (для простоты не показан), также снабженным соответствующим инвертером.
Как более подробно проиллюстрировано ниже, устройство управления связано с мостовым краном, при этом устройство управления содержит блок 40 управления для передачи управляющих действий на двигатели мостового крана и отдачи команд (для каждого двигателя) на соответствующий инвертер, который регулирует скорость связанного с ним двигателя.
В одном варианте изобретения блок 40 управления может осуществлять управление с помощью ПЛК (программируемого логического контроллера) или другого блока управления, который в свою очередь воздействует на инвертеры двигателей.
Блок 11 связан с тележкой 20, при этом блок в свою очередь снабжен захватывающим элементом 12, например крюком, и может поднимать или опускать груз (для простоты не показан) с использованием системы тросов 27, приводимых в действие талью 18, установленной на поперечном элементе 17.
Таким образом, захватывающий элемент для груза 12 может быть поднят или опущен вдоль вертикального направления, но также может подвергаться перемещениям, в ходе которых груз 12 отклоняется от вертикали, в зависимости от рабочих условий, например, когда мост 19 и/или тележка 20 находятся в движении, или, когда оператор прикладывает некоторую силу.
На фиг. 2 кран с фиг. 1 представлен в виде своих основных компонентов, чтобы выделить инерциальную платформу 30, способную измерять перемещения троса, удерживающего захватывающий элемент для груза, как проиллюстрировано в приведенном ниже описании.
Также с мостовым краном 10 связано устройство, приспособленное для активного управления стабильностью, которое соответствует различным вариантам осуществления настоящего изобретения.
С учетом фиг. 3, заметим, что устройство управления содержит инерциальную платформу 30 и блок 40 управления, при этом блок управления способен передавать команды перемещения на инвертеры, которые управляют приведением в действие двигателей мостового крана.
Далее, блок 40 управления может подать команды как в инвертер ' который регулирует двигатель 24, приводящий в движение мост 19, так и в инвертер, регулирующий двигатель, который приводит в движение тележку 20; эти команды взаимно независимы и могут быть направлены в инвертеры двигателей с помощью аналоговых соединений, с помощью CAN-шины или других ethernet соединений с помощью шин.
В частности, инерциальная платформа 30 содержит акселерометр 34 с тремя измерительными осями и гироскоп 36, которыми управляют с помощью микропроцессора 32.
В предпочтительном варианте осуществления изобретения блок 40 управления может быть фактически установлен на мостовом кране (как указано в левой части фиг. 3) и может быть соединен кабелем 42, или в беспроводном режиме, с инерциальной платформой 30.
В другом предпочтительном варианте осуществления изобретения блок 40 управления может быть связан с дистанционным блоком управления, например, встроенным в сервер 80, где дистанционный блок может работать с программным обеспечением управления и конфигурации системы, а также программным обеспечением постобработки данных и может сопрягаться с платформой типа «Сервисы (CIMS) комплексного управления кранами», как описано в патенте IT 1393950, который включен в настоящий документ для получения дополнительной информации.
В одном варианте изобретения инерциальная платформа 30 и блок 40 управления могут быть объединены в одном блоке.
Рассматривая теперь инерциальную платформу 30, акселерометр 34 с тремя измерительными осями способен измерять угол наклона троса 27, который поддерживает захватывающий элемент для груза 12; тем не менее, измеренный угол указывает только наклон троса относительно вертикали, но не содержит информации относительно направления, в котором отклонен трос.
Для завершения представления в пространстве перемещений захватывающего элемента 12, инерциальная платформа 30 также содержит гироскоп 36.
Как известно, гироскоп 36 является инструментом, который стремится поддерживать свою ось вращения в определенной ориентации относительно неподвижного направления и, таким образом, позволяет измерять угол ориентации относительно неподвижного направления.
Следовательно, объединение информации, полученной из измерений, выполненных акселерометром 34 с тремя измерительными осями и гироскопом 36, используют для определения положения захватывающего элемента 12 в пространстве, что выражают, например, углом ϑ с фиг. 2, а также используют для вычисления изменения


В предпочтительном варианте осуществления изобретения инерциальная платформа расположена на неподвижной оконечной муфте троса, поддерживающего захватывающий элемент.
Это расположение инерциальной платформы предпочтительно по сравнению с ее расположением на блоке 11, так как блок 11 может свободно перемещаться на тросах 27, а захватывающий элемент 12 стремится всегда поддерживать по существу вертикальную ориентацию. Следовательно, акселерометр на блоке будет иметь тенденцию измерять ускорения значительно меньшие по сравнению с ускорениями, измеренными при расположении акселерометра на оконечной муфте троса.
В любом случае данные от инерциальной платформы 30 направляют в блок 40 управления, чтобы в устройстве управления могли определить корректировки, которые должны быть направлены на тележку 20 и мост 19. Далее эти корректировки используют путем воздействия на инвертеры соответствующих двигателей с целью такого перемещения тележки 20 и/или моста 19, чтобы перевести захватьшающий элемент для груза в вертикальное положение или на желаемый угол в более короткое время по сравнению с временем в случае отсутствия управления.
Устройство управления также может действовать вместе с перемещением моста и/или тележки с целью поддержания малых значений угла наклона троса, что позволяет работать безопасным образом.
Для иллюстрации функционирования системы управления рассмотрим фиг. 4, на которой схематично показаны некоторые характерные параметры системы, проиллюстрированной в соответствии с примером, в котором рассматривается только горизонтальное перемещение одного из компонентов крана.
Так как мостовой кран может предусматривать перемещение тележки 20 вдоль первой оси и другое перемещение, задаваемое мостом 19, вдоль второй оси, перпендикулярной первой, все приведенные ниже идеи могут быть использованы для обеих осей.
Тем не менее, так как перемещения вдоль этих осей не связаны друг с другом, поскольку они порождаются соответствующими двигателями, работающими независимо друг от друга, то для простоты можно рассмотреть только случай перемещения вдоль одной оси, то есть в настоящем примере вдоль оси X, показанной на фиг. 4, при этом перемещение вдоль второй оси осуществляется аналогично, и этим перемещением управляют независимо и полностью аналогичным образом.
Следовательно, в качестве примера на фиг. 4 схематично показан один из компонентов мостового крана, который может быть тележкой 20 или мостом 19, при этом указаны масса М и положение X, то есть расстояние от центра тяжести для массы М до неподвижной точки отсчета. Масса М может перемещаться вдоль оси X.
Вес m прикреплен к массе М с помощью троса или цепи длиной 1. Следовательно, вес m может колебаться аналогично простому маятнику и, следовательно, может отклоняться от вертикали на угол ϑ.
Таким образом, вес m указывает вес, который кран должен поднять, где, в зависимости от конкретных случаев, вес может представлять собой вес захватывающего элемента, поддерживающего груз, или вес захватывающего элемента без груза. Логика системы остается одинаковой в обоих случаях.
Следовательно, для построения модели динамического поведения системы, показанной на фиг. 4, может быть использована следующая процедура.
Во-первых, может быть определена функция Лагранжа системы с фиг. 4:
L=Т-U,
где, как известно, Т является кинетической энергией системы, a U является потенциальной энергией системы.
Для системы, показанной на фиг. 4, с использованием обобщенных координат Лагранжа, можно записать следующие выражения:

и

где


В этом случае предполагаем, что трос обладает постоянной длиной l, а весом троса можно пренебречь.
В таком предположении запишем уравнения Эйлера-Лагранжа для системы с фиг. 4, то есть:
где b является параметром, отражающим трения, a F представляет собой силу, приложенную к системе.
В результате вычислений приходим к следующим выражениям:


С использованием эталонной скорости


Определяя управляющее действие как



Со ссылкой на фиг. 5, опишем структурную схему варианта осуществления системы управления, соответствующей изобретению.
В частности, в предположении, что захватывающий груз элемент необходимо привести в вертикальное положение, то есть достичь

В контроллере C(s) принимают в качестве входных данных угловую ошибку ϑе, заданную разностью между желаемым углом

В контроллере C(s), на основе угловой ошибки ϑе, вычисляют эталонную или желаемую скорость

Также система управления включает в себя учет возможных входных данных со стороны оператора (блок 100) мостового крана, если таковой имеется.
Эталонную или желаемую скорость


В свою очередь, эффективную скорость
Этот угол может быть измерен инерциальной платформой 30, которая возвращает значение ϑm(t) для использования при вычислении нового значения угловой ошибки ϑе.
Контроллер C(s) может быть пропорциональным, то есть C(s)=Kр, где коэффициент усиления Kр связывает угловую ошибку с эталонной скоростью

Эффективное используемое значение Kр зависит от системы. В целом, при высоком Kр присутствует быстрое уменьшение раскачивания, платой за что является уменьшение скорости тележки, и наоборот.
Более того, для улучшения характеристик системы надо дополнительно рассмотреть изменение длины троса, учет которого может быть осуществлен пропорциональным контроллером с изменением коэффициента усиления, что подробнее описано далее.
В качестве альтернативы, контроллер C(s) может быть PI контроллером, то есть пропорционально-интегральным контроллером.
Функционирование системы управления полностью аналогично, когда нужен наклон не вертикального захватывающего элемента для груза, например, может присутствовать отклонение в один градус во время перемещения всего мостового крана из одного положения в другое в месте работы. Единственная разница будет в установке другого желаемого наклона, то есть в примере

На фиг. 6 показан пример измерения параметров, описывающих перемещение захватывающего элемента, при этом измерение осуществляют с использованием инерциальной платформы 30.
В этом случае, первое измерение может быть сделано акселерометром 34, который измеряет, в описываемом случае, изменение ускорения груза вдоль оси Y. Одновременно гироскоп 36 может измерять изменение угла пространственной ориентации груза вдоль оси X.
Измерения могут быть объединены с помощью известных способов фильтрации, например с использованием расширенного фильтра Кальмана, с целью получения измерения изменения угла ϑ со знаком вдоль оси Y.
Для улучшения работы системы управления, можно считать, что коэффициент усиления Kр контроллера также зависит от расстояния 1 от груза до тележки, как схематично показано на фиг. 7.
В этом случае, при работе может быть использован пропорциональный контроллер с изменением коэффициента усиления.
Как известно, способ управления с изменением коэффициента усиления подразумевает проектирование контроллера для различных точек функционирования управляемой системы. Полученные таким образом параметры далее могут быть таким образом интерполированы, чтобы спроектировать контроллер, который обладает переменным коэффициентом усиления в зависимости от различных точек функционирования.
На фиг. 7 в качестве примера показана тележка 20, которая смещена на рельсах, и груз массы m, соединенный с тележкой с помощью тросов или цепей, для которых считается, что они обладают незначительной массой.
Переменные, нужные для управления изменением коэффициента усиления, следующие:
- расстояние d между крюком оконечной муфты и осью, сформированной между тележкой и грузом в стационарных состояниях (без колебаний),
- угол ϑ отклонения, оцененный с использованием инерциальной платформы и равный углу наклона троса, который поддерживает груз,
- и диапазон hmax и hmin, в котором масса m может перемещаться вдоль вертикальной оси.
На фиг. 8 схематично показано функционирование пропорционального контроллера. Угол отклонения получают с помощью инерциальной платформы и фильтруют с помощью фильтра высоких частот, чтобы исключить постоянную составляющую, в то время как желаемый угол равен нулю, то есть отсутствует колебание. Полученную ошибку разности умножают на коэффициент Kp(h), зависящий от высоты h груза, так что получают корректировку скорости для направления на инвертеры, которые управляют двигателями.
Начиная с доступных данных оценивают высоту груза (под этим понимают расстояние от тележки) с целью изменения управляющего коэффициента усиления:


В этой точке h оценена и находится в пределах между hmax и hmin, то есть таким образом h всегда содержится между этими значениями.
Из этапа начальной настройки системы могут быть получены два значения Kр, применимые для максимальной и минимальной высот, то есть Kp_max и Kp_min. В этом месте для вычисления значения Kр может быть использована следующая формула:

Это решение позволяет работать во всех случаях, когда груз подвержен значительным перемещениям, проходящим от нижнего положения до верхнего положения, например, под воздействием тали 18.
Наконец, в целом, путем расположения блока управления на расстоянии от подъемного устройства, помимо операции дистанционного управления, устройство может быть объединено с набором данных реального времени с целью управления функционированием операции подъема и планирования его технического обслуживания.
Представляется, что можно предложить ряд модификаций и вариантов изобретения, которые, тем не менее, будут находиться в рамках объема идеи изобретения. Более того, все подробности могут быть заменены другими технически эквивалентными элементами.
Реферат
Предложено устройство для управления раскачиванием груза, подвешенного на снабженном двигателем подвижном элементе (20), который может перемещаться вдоль горизонтальной оси. Устройство управления содержит блок управления (40) и инерциальную платформу (30). Инерциальная платформа (30) способна определять характерные значения угла наклона троса (27), который поддерживает груз, относительно вертикали и снабжена средством передачи этих значений в блок управления (40). Блок управления (40) снабжен средством измерения и управления скоростью снабженного двигателем подвижного элемента (20) и способен так обработать эти значения, характеризующие угол наклона троса (27) относительно вертикали, чтобы рассчитать и передать управляющие действия, направленные на динамическое изменение скорости снабженного двигателем подвижного элемента (20) в зависимости от желаемого угла наклона троса (27) относительно вертикали. Блок (40) управления содержит пропорциональный контроллер с изменением коэффициента усиления, снабженный средством вычисления переменного коэффициента усиления, применяемого для управления скоростью снабженного двигателем подвижного элемента (20) в зависимости от расстояния от груза до снабженного двигателем подвижного элемента (20). Указанное расстояние находится между максимальным и минимальным значениями, при этом переменный коэффициент усиления вычисляется как функция расстояния (h) от груза до снабженного двигателем подвижного элемента (20). Предложены также способ управления раскачиванием груза и устройство управления для подъемного устройства. Достигается стабилизация колебаний груза как во время обычных операций, так и из-за этапов резкого торможения или ускорения. 3 н. и 9 з.п. ф-лы, 8 ил.
Комментарии