Система привода для дугообразного эскалатора - RU2109673C1
Код документа: RU2109673C1
Чертежи







Описание
Изобретение касается системы привода для дугообразного эскалатора со спирально расположенной в вертикальном направлении рамой, которая содержит транспортный участок для ступенек с секторным поперечным сечением, имеющий цепные колеса верхний, а также нижний участок поворота в сочетании по меньшей мере с одним приводом и направляющими возвращения для ступенек, которые могут приводиться в действие через шарнирно присоединенные в их боковых краевых зонах, с помощью большого количества расположенных параллельно друг другу образованных из внутренних и внешних пластин цепей, и каждая ступенька имеет в соответствующей краевой зоне оснащенный ходовым роликом осевой участок, а также удаленный от него неприводной ролик, которые обкатываются по соответствующим направляющим, причем по меньшей мере одна из соответствующих концевых зон отдельных пластин и/или соответствующий осевой участок оснащены содержащей сферический подшипник втулкой.
Из Европейской заявки N 118813 известен подобного рода дугообразный эскалатор. С обеих сторон ступенек предусмотрена втулочно-роликовая цепь, причем каждая ступенька имеет соединяющую втулочно-роликовые цепь ось ступеньки. Соединительные элементы образованной из пластинчатых звеньев цепи соединены через концевые участки каждой оси ступеньки с осями ступенек или с взаимно смежной осью ступеньки только с помощью двух сферических шарниров. Цилиндрическая наружная поверхность сферического шарнира, который соединяет друг с другом соединительные элементы, имеет в основном такой же размер, что и ролики цепей ступенек, и выполнена таким образом, что цилиндрическая наружная поверхность может взаимодействовать с цепным колесом как ролик цепи ступенек. Приводные цепи у дугообразных эскалаторов направляются по спирально расположенной направляющей, причем ходовые ролики обкатываются по соответствующим направляющим. Вследствие определенных радиусом спирали различий в диаметрах между внутренней зоной и наружной зоной ступенек, приводные цепи движутся с различными окружными скоростями, так что при изменении радиусов направляющей, в частности в зонах перехода и изменения направления из зоны подъема в зону опускания, возникают проблемы деформации, которые также не могут быть полностью преодолены с помощью предложенной конструкции.
Известен дугообразный эскалатор [1], который содержит большое количество оснащенных осями ступеней, соединенных друг с другом с помощью цепей ступеней. На осях ступеней установлены с возможностью вращения опорные ролики, причем помимо этого на направляющих предусмотрены направляющие ролики, которые вращаются вокруг оси перпендикулярно осям ступеней. При этом направляющие ролики предусмотрены только на наружном дугообразном конце осей ступеней. При коническом расположении внутренних и наружных зубчатых колес с различными диаметрами в зонах изменения направления поверхности впадин зубьев наклонены под углом относительно горизонталей. Цепи ступеней с помощью первого соединительного элемента, который соединен с осью ступени, и с помощью второго соединительного элемента, который примыкает к первому соединительному элементу, могут отклоняться пространственно. Наряду со сложной конструкцией системы привода в качестве недостатка можно констатировать то, что функционирование этой системы поставлено под вопрос по следующим причинам: появляющиеся вследствие различий диаметров в зонах изменения направления различия в скорости цепей ступеней вызывают противоположное смещение цепей ступеней, в частности в зонах поворота, в результате которого создаются значительные усилия. Даже если благодаря применению двух пространственных опорных зон возможно определенное деформирование цепей ступеней, то оно не смогло бы компенсировать встречное движение цепей ступеней. Это происходит во всех зонах дугообразного эскалатора, в которых не совпадают угловые скорости внутренней и наружной цепей ступеней. При боковом смещении ступеней естественно происходит также боковое смещение шарнирно присоединенных к ним опорных роликов, вследствие чего набегание цепей ступеней на соответствующее цепное колесо подвержено воздействию значительных принудительных усилий, что может привести даже к деформированию осей ступеней.
Целью изобретения является устранение недостатков уровня техники и усовершенствование системы привода таким образом, чтобы можно было реализовать по возможности беспринудительный переход, в частности в зонах перехода и изменения направления движения эскалатора.
В соответствии с изобретением эта цель достигается благодаря тому, что обе концевые зоны отдельных внутренних пластин оснащены содержащими сферическими подшипниками втулками, а имеющий сферический подшипник соответствующий ходовой ролик установлен, с одной стороны, между параллельными внутренними пластинами в зоне соответствующего осевого участка и, с другой стороны, расположен соответственно между имеющими сферический подшипник втулками соответствующих концевых зон внутренних пластин.
Благодаря тому, что каждый ходовой ролик, во-первых, предусмотрен между внутренними пластинами и, во-вторых, оснащен сферическим подшипником, наряду с уменьшением монтажного пространства достигается также значительно лучшая подвижность всех элементов конструкции относительно друг друга, так что, в частности, в зонах перехода и изменения направления движения дугообразного эскалатора оптимально могут быть компенсированы нежелательные здесь принудительные усилия и деформации, не приводя к повышенным трениям и/или деформациям или повреждениям взаимодействующих элементов конструкции.
Предпочтительно соответствующий осевой участок выступает за пределы ходового ролика и оканчивается в зоне стенки обращенной к наружным зонам рамы внутренней пластины, не проходя через ее торцевую поверхность, где он затем фиксируется, например, с помощью пружинного стопорного кольца заподлицо с торцовой поверхностью этой внутренней пластины.
Благодаря этой мере без влияния на подвижность соответствующего осевого участка в зоне этой внутренней пластины может быть предусмотрен несущий элемент для базирования верхних и нижних направляющих роликов. При этом несущим элементом может быть отдельное тело, которое соединяется с соответствующей пластиной с возможностью разъединения или образуется с помощью уступов, которые при изготовлении пластины непосредственно формируются на ней, например, путем штамповки, и отгибаются в ходе последующей технологической операции.
Напротив в Европейской заявке N 118813 несущие элементы располагаются непосредственно на концах осей вне ходовых роликов, так что здесь также при пространственном перемещении соответствующей приводной цепи и связанных с этим деформациях это может привести к воздействиям принудительных сил, которые отрицательно оказываются на характеристике подвижности направляющих роликов. Этот недостаток надежно исключается путем пространственного и функционального разделения между осевым участком и направляющими роликами.
Система привода, в которой соответствующий участок поворота дугообразного эскалатора образован с помощью двух удаленных друг от друга, соответственно соединяемых друг с другом с помощью вала, имеющих различные диаметры цепных колес, которые с целью изменения направления движения цепей оснащены по наружной окружности большим количеством воспринимающих втулки скругленных углублений, содержит в зависимости от шага цепи для восприятия и направления расположенного между втулками ходового ролика в зоне соответствующего цепного колеса другое углубление, диаметр делительной окружности которого меньше диаметра делительной окружности втулок. Благодаря этой мере обеспечивается то, что соответственно имеющие ходовой ролик внутренние пластины также без проблем могут отклоняться. Подобного рода система привода содержит, кроме того, в зоне по меньшей мере одного из участков поворота привод, на приводном валу которого базируются цепные колеса, причем одно из цепных колес, в частности цепное колесо меньшего диаметра, может перемещаться в направлении окружности относительно другого цепного колеса. Это, например, может осуществляться с помощью продольных пазов, в которые входят пальцы приводного вала. Угловое смещение одного цепного колеса относительно другого цепного колеса может вычисляться и устанавливаться в зависимости от диаметра цепных колес, а также от различных скоростей внутренней и наружной цепей. Цепные колеса неприводного участка поворота установлены на валу с возможностью свободного вращения. В зависимости от различий диаметров это может происходит таким образом, что наружная цепь движется примерно на 10-15 % быстрее внутренней цепи, причем однако цепи должны набегать на соответствующее цепное колесо прямолинейно, а не наклонно. Вследствие относительно проворачивания обоих цепных колес относительно друг друга учитывается эта разница скоростей, так что обе цепи могут равномерно и прямолинейно набегать на соответствующее цепное колесо. Таким образом надежно исключается воздействие принудительных сил.
В соответствии с другой идеей изобретения в зоне цепных колес предусмотрены поводковые элементы, которые предназначены для базирования и направления предусмотренных в зоне ступенек неприводных роликов. Эта мера способствует принудительному направлению соответствующих ступеней в зоне изменения направления движения, благодаря чему повышается надежность при возможном боковом смещении ступенек. Поводковыми элементами могут быть отдельные элементы, которые изготавливаются в соответствии с определением огибающих в процессе вращения оси неприводного ролика и предусмотрены в зоне цепных колес. Альтернативно имеется возможность установления поводковых элементов, например, в виде пазов, в отдельных дисках, которые затем насаживаются на валу и соединяются с цепными колесами.
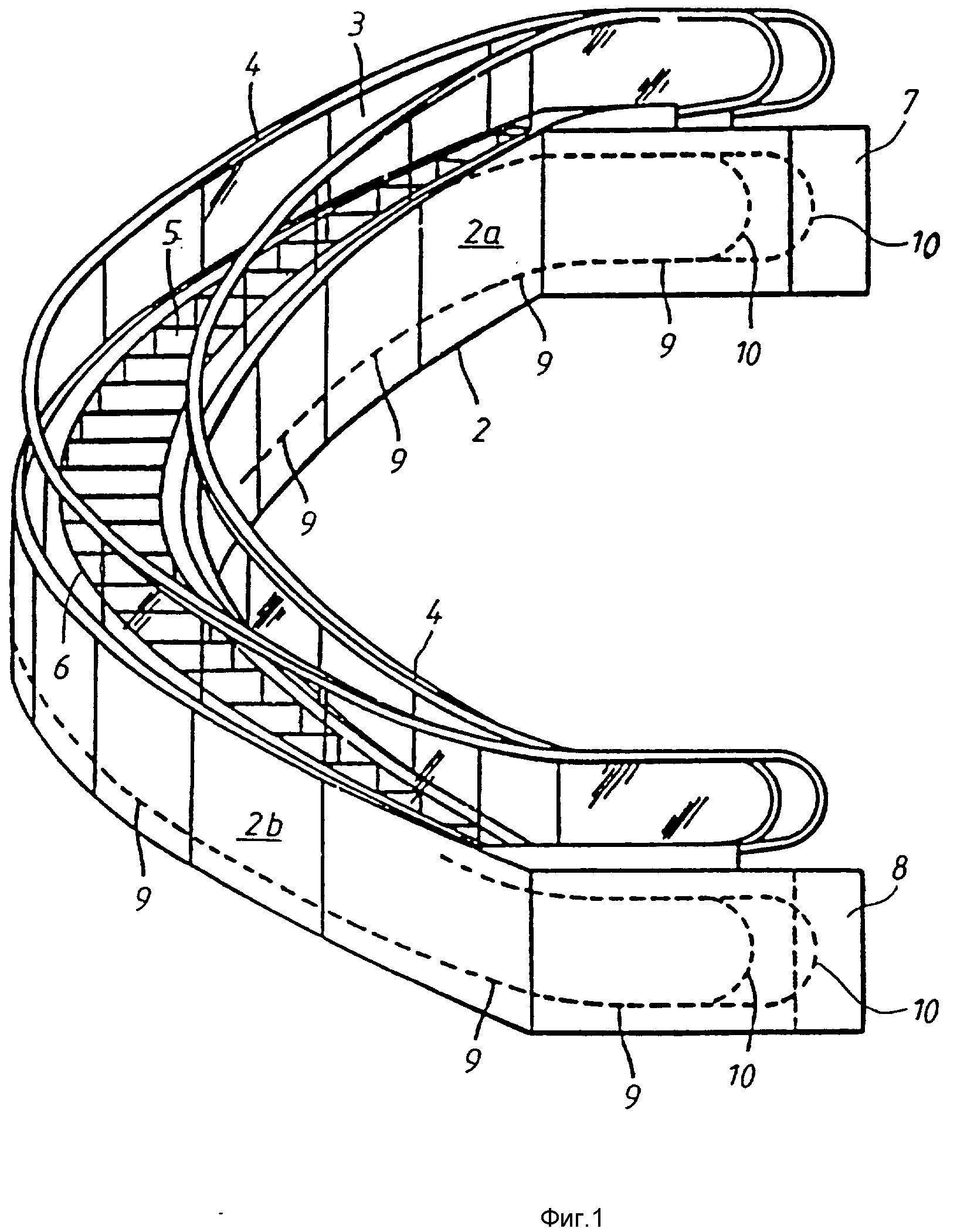
На фиг.1 представлена принципиальная схема дугообразного эскалатора; на фиг. 2 - частичное изображение в перспективе относящейся к системе привода приводной цепи; на фиг.3 и 4 - различные виды изображения, представленного на фиг.2; на фиг.5 - изображение относящегося к системе привода цепного колеса; на фиг.6 - принципиальное изображение участка поворота; на фиг.7 - смещенные в направлении окружности цепные колеса участка поворота; на фиг.8 - изображение поводкового диска для неприводных роликов ступенек.
На фиг. 1 показан в виде принципиальной схемы дугообразный эскалатор 1, который содержит в основном следующие элементы конструкции: спирально проходящее в вертикальном направлении основание 2, которое образует раму дугообразного эскалатора 1 и на котором базируются основные элементы привода, наружные стороны 2a, две рамы, выполненную аналогично этому спиральную балюстраду 3 вместе с поручнями 4 и ступеньками 5, которые в зоне поворота образуют транспортный участок 6, верхний, а также нижний участки поворота 7, 8, а также направляющие 9 возвращения для только обозначенных здесь приводных цепей 10.
На фиг. 2 показана в виде частичного вида в перспективе приводная цепь 10, которая состоит из большого количества соединенных друг с другом внутренних пластин 11 и наружных пластин 12, которые в концевых зонах соединены друг с другом с помощью пальцев 13. Пальцы 13 в зоне внутренних пластин 11 окружены втулкой 14, причем между пальцем 13 и втулкой 14 проходит соответственно сферический подшипник 15. В зоне, не показанной здесь детально ступеньки, находится с обеих сторон от нее осевой участок 16, который простирается в направлении соответствующей пластинчатой цепи 10. Соответственно между двумя содержащими сферический подшипник 15 втулками 14 на стороне ступеньки проходит ходовой ролик 17, который расположен между удаленными друг от друга внутренними пластинами 11, причем с одной стороны осевой участок 16 выступает за пределы внутренней пластины 11 и ходового ролика 17, а с другой стороны оканчивается в участке стенки 18 внутренней пластины 11, где он фиксируется, например, с помощью пружинного стопорного кольца (не показано). По аналогии с пальцами 13 каждый ходовой ролик 17 также содержит сферический подшипник 19, так что устанавливается оптимальная пространственная подвижность этой приводной цепи 10. В зоне свободной торцовой поверхности 20 внутренних пластин 11 соответственно предусмотрен несущий элемент 21, который соединен с соответствующей внутренней пластиной 11 с возможностью разъединения. Несущий элемент 21 предназначен для базирования верхнего и нижнего направляющих роликов 22, 23, которые предусмотрены для уменьшения действующих снаружи сил и обкатываются по направляющим профилям (не показано).
На фиг. 3 и 4 показаны виды сбоку и сверху частичной зоны приводной цепи 10 в соответствии с фиг. 2. Можно видеть внутренние пластины 11 и наружные пластины 12, пальцы 13, а также окружающие их втулки 14 вместе со сферическими подшипниками 15, ходовой ролик 17, осевой участок 16, который простирается в зону только обозначенной ступеньки 5 вместе с неприводным роликом 5', несущий элемент 21, а также направляющие ролики 22, 23, которые с помощью штифта 24 закреплены в несущем элементе 21. Торцовая поверхность 25 осевого участка 16 оканчивается в зоне стенки 18 соответствующей внутренней пластины 11, не проходя через местную торцовую поверхность 20, и в этой зоне зафиксирована с помощью пружинного стопорного кольца 35.
Фиг. 5 показывает в качестве другой составной части системы привода в соответствии с изобретением предусмотренное в соответствующем участке поворота цепное колесо 26. Зона набегания не показанной здесь более детально пластинчатой цепи обозначена штрихпунктирной линией. Для базирования втулок 14 пластинчатой цепи 10 по окружности 27 цепного колеса 26 расположены подогнанные по диаметру втулок 14 углубления 28, 29 причем обозначенная штриховой линией зона 30 представляет собой делительную окружность оси 36 втулки. Между углублениями 28, 29 предусмотрено более глубокое углубление 31, которое предназначено для базирования ходового ролика 17, делительная окружность 32 которого имеет меньший радиус, чем делительная окружность 30 оси 36 втулки.
Фиг. 6 показывает в качестве принципиальной схемы участок 7 поворота, который содержит два имеющих различные диаметры цепных колеса 26, 26', которые соединены друг с другом с помощью вала 37. Можно видеть углубления 31 для базирования ходовых роликов 17, которые удерживаются между внутренними пластинами 11. Вследствие различий в диаметрах наружных и внутренних цепных колес 26, 26' меньшее внутреннее цепное колесо 26' в зависимости от разницы диаметров, составляющей 10-15 %, вращается быстрее, чем наружное цепное колесо 26. В соответствии с этим расстояние а' вала 37 также больше расстояния "а", это было при одинаковых размерах цепных колес. Так как цепи 10 должны набегать на соответствующее цепное колесо 26, 26' не наклонно, а прямолинейно, эти параметры необходимо также учитывать, что наглядно показано на фиг. 7.
Фиг. 7 показывает расположение наружного и внутреннего цепных колес 26, 26'. Чтобы можно было преодолеть обозначенную на фиг. 6 проблематику, только обозначенная здесь приводная ось 38 в зоне меньшего цепного колеса 26' оснащена пальцами 33, которые вводятся в удлиненные отверстия 34 меньшего цепного колеса 26', так что перед вводом в эксплуатацию дугообразного эскалатора можно добиться оптимальной установки обоих цепных колес 26, 26' относительно друг друга, и цепи (не показано) могут равномерно и прямолинейно набегать на цепные колеса 26, 26'.
При этом соответствующий угол поворота альфа зависит от разности диаметров цепных колес 26, 26', а также от разности длин участков "а", а, в соответствии с фиг. 6.
Фиг. 8 показывает поводковый диск 39 для неприводных роликов (не показаны) ступенек 5, который может быть, например, насажен на приводную ось 38 и соединен с соответствующим цепным колесом 26, 26' (не показано). В поводковый диск 39 введены поводковые элементы 40 в виде пазов, которые соответствуют геометрии обкатывания неприводных роликов при обращении ступенек 5 вокруг цепных колес 26, 26' в зоне соответствующего участка поворота.
Реферат
Сущность изобретения: система привода для дугообразного эскалатора со спирально расположенной в вертикальном направлении рамой, содержащей транспортный участок для ступенек с секторным поперечным сечением, который имеет цепные колеса, верхний и нижний участки поворота с приводом и направляющими возвращения для ступенек, приводимых в действие шарнирно присоединенными в их боковых краевых зонах с помощью расположенных параллельно друг другу, образованных из внутренних и наружных пластин цепей, и каждая ступенька имеет в соответствующей краевой зоне снабженный ходовым роликом осевой участок, а также удаленный от него неприводной ролик, которые перемещаются по направляющим. При этом по меньшей мере одна из концевых зон пластин и/или соответствующий осевой участок имеют втулку со сферическим подшипником. Ходовой ролик, имеющий сферический подшипник, установлен с одной стороны между параллельными внутренними пластинами в зоне соответствующего участка и с другой стороны расположен соответственно между имеющими сферический подшипник втулками соответствующих концевых зон внутренних пластин. 10 з.п.ф-лы, 8 ил.
Формула
29.10.93 по пп.1 и 6;
25.10.93 по пп.2 - 5, 7 - 11.
Комментарии