Способ и комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи - RU2751364C1
Код документа: RU2751364C1
Чертежи
Описание
Изобретение относится к черной металлургии, в частности к доменному производству и может быть использовано для увеличения производительности доменной печи за счет снижения ограничения по времени доставки шихты скиповым подъемом.
Известно устройство для управления электроприводом скиповой лебедки доменной печи [1] (патент RU №2101226, МПК B66B 1/24, B66B 9/06, B66B 17/32 опубликованного 10.01.1998), содержащее датчик тока, включенный в якорную цепь приводного электродвигателя постоянного тока, датчик частоты вращения электродвигателя, блок формирования команд управления, один из входов которого соединен с выходом блока путевых кулачковых выключателей, другой вход с панелью управления загрузочного органа, один из выходов с пускателем электродвигателя, а другой выход с управляющим входом рабочего тормоза, при этом оно снабжено вычислительным блоком и генератором прямоугольных импульсов, датчик частоты вращения выполнен бесконтактным с возможностью формирования двух сдвинутых по фазе прямоугольных импульсов, причем входы вычислительного блока подключены к выходам генератора прямоугольных импульсов, датчика частоты вращения, датчика тока, а также выходам блока формирования команд управления, соответствующим командам на подъем и спуск скипов, сигналам о тяжелом и легком материале шихты, сигнальные выходы вычислительного блока, соответствующие заданным скоростям лебедки, противоходу скипов, неисправности рабочего тормоза и перегрузке электродвигателя, соединены с отдельными входами блока формирования команд управления, а выход последнего, соответствующий команде на включение аварийной сигнализации, подключен к входу блока сигнализации.
Недостатком этого устройства является то, что измерение загрузки скипа используется только для функции защиты и не влияет на режимы ускорения, торможения электропривода и остаток пути с которого начинается торможение для достижения заданной точки перемещения.
Известен способ автоматического управления частно - регулируемым электроприводом лебедки скипового подъема доменной печи [2] (заявка на патент RU №2010119465 МПК B66B 9/06, дата публикации 27.11.2011, бюл. №33), содержащий систему управления электроприводом, соединенную с путевым командоаппаратом, обеспечивающим разгон при подъеме скипов из скиповой ямы, движение на установившейся скорости по наклонному мосту, замедление перед подходом скипа к засыпному устройству на колошнике, останов на колошнике для разгрузки, отличающийся тем, что сигналы управления при подъеме скипов подают на вход системы управления электропривода от путевого командоаппарата, фиксирующего одновременное срабатывание двух контролируемых цепей подъемов левого и правого скипов.
Недостатком этого способа является то, что указанный способ автоматического управления не подразумевает контроль загрузки скипового подъёма. Путевой командоаппарат не позволяет организовать большее число контролируемых позиций начала разгона и торможения скипа оптимальной для каждого из режимов подъема.
Наиболее близким (прототипом) по технической сущности к заявленному способу, по количеству сходных признаков, является способ устройство для измерения веса шихты в скиповом подъемнике [3] (патент RU №2231030 МПК G01G 19/18, опубликованного 20.06.2004, бюл. №17), содержащее блоки для расчета электрической энергии по потребляемому току и напряжению двигателя подъема главного скипа на участке движения с постоянной скоростью и вычислительное устройство для расчета веса шихты в скипе.
Недостатком этого устройства является то, что расчет массы в скипе не влияет на режимы ускорения, торможения электропривода и остаток пути с которого начинается торможение для достижения заданной точки перемещения.
Технический результат, на достижение которого направлено предполагаемое изобретение является: снижение времени транспортировки (или перемещения) скипового подъема доменной печи, за счет изменения времени разгона и торможения скипового подъема, который оптимален для каждого режима в зависимости от массы транспортируемой шихты.
Технический результат достигается благодаря тому, что в способе автоматического регулирования перемещения скипового подъема доменной печи, включающий систему регулирования электропривода, соединенную с задатчиком интенсивности 25, обеспечивающим формирование необходимого ускорения и замедления скипового подъема, поступление задания скорости на селектор 23, который в зависимости от выхода логического блока заданной скорости 21 определяет выбранную уставку задания или установившуюся скорость скипа в зоне загрузки 22.1 или максимальную установившуюся скорость скипа 22.2 или установившуюся скорость скипа в зоне выгрузки 22.3, сравнивает положения уставок с фактическим положением скипа через блоки сравнения: положения начала полной остановки скипа 18, перехода с повышенной скорости на скорость в зоне загрузки 19, перехода со скорости в зоне загрузки на повышенную скорость 20, при этом сравнивая на блоках сравнения 5 и 6 значение с выхода устройства определения механического момента двигателя скипового подъема 2 с уставками 3.1 и 3.2, предназначенных для определения массы, предусмотрены следующие отличия:
• что в момент установившегося движения скипа в зоне
загрузки, определяемым блоком сравнения 7 на основании выхода датчика положения скипа 1 и уставки сравнения положения скипа 4 фиксируют значение выходов блоков сравнения 5 и 6 в блоке памяти выбранного режима 8 до начала следующего цикла загрузки для каждого из выбранного режима загрузки скипового подъема, а именно: для работы скипа при подъеме пустого скипа безшихты; при подъеме кокса; при подъеме железорудного материала (ЖРМ);
• и посредством селекторов 11, 12, 15, 16 выставляют
индивидуальные уставки: 9.1, 9.2, 9.3 - положения скипа, определяющее начало торможения скипа до полной остановки, 10.1, 10.2, 10.3 - уставки темпа торможения; 13.1, 13.2, 13.3, - положение скипа, определяющее начало перехода с повышенной скоростью на скорость в зоне выгрузки, 14.1, 14.2, 14.3 - уставки темпа разгона задатчика интенсивности для блоков сравнения 18, 19 и задатчика интенсивности 25.
• При этом значение уставки 17 положения перехода со скорости в зоне загрузки на повышенную скорость остается неизменным для всех режимов;
• после чего сравнивают информацию в блоках сравнения 18, 19, 20 и передают ее в логический блок выбора заданной скорости 21 для определения и выбора уставки задания: установившуюся скорость скипа в зоне загрузки 22.1 или максимальную установившуюся скорость скипа 22.2, или установившуюся скорость скипа в зоне выгрузки 22.3;
• при этом задание скорости для электропривода 24 осуществляют через задатчик интенсивности 25.
Способ автоматического регулирования параметров перемещения скипового подъема доменной печи реализуется при помощи комплекса автоматического регулирования перемещения скипового подъема доменной печи, включающий в себя датчик положения скипа 1, один выход которого соединен с блоком сравнения 18, устройство определения механического момента двигателя скипового подъема 2, первый и второй выход которого соединен с блоком сравнения 5 и 6, уставок сравнения массы 3.1, выход которого соединен с блоком сравнения 5 и уставок сравнения массы 3.2, выход которого соединен с блоком сравнения 6, блоки сравнения 18, 19, 20, выходы которых соединены со входом логического выбора заданной скорости 21, выход последнего соединен с одним входом селектора 23, при этом три других входа селектора 23 соединены через уставок: заданной скорости установившуюся скорость скипа в зоне загрузки 22.1, максимальную установившуюся скорость скипа 22.2, установившуюся скорость скипа в зоне выгрузки 22.3, а выход соединен с задатчиком интенсивности 25, выход которого соединен с электроприводом 24. Предусмотрены следующие отличия:
• дополнительно снабжено блоком сравнения 7, один вход которого соединен с датчиком положения скипа 1, а другой вход соединен с уставкой сравнения положения скипа 4;
• дополнительно снабжено блоком памяти выбранного режима 8, вход которого соединен с блоками сравнения 5, 6, 7, а выход соединен с селекторами 11, 12, 15, 16;
• причем вход селектора 11 соединен с тремя выходами уставок сравнения положения скипа 9.1, 9.2, 9.3, а выход соединен с блоком сравнения положения начала полной остановки скипа 18;
• вход селектора 12 соединен с тремя выходами уставок темпа замедления скипа 10.1, 10.2, 10.3, а выход соединен с задатчиком интенсивности 25;
• вход селектора 15 соединен с тремя выходами уставок сравнения положения скипа 13.1,13.2, 13.3, а выход селектора 15 соединен с блоком сравнения 19;
• вход селектора 16 соединен с тремя выходами уставок темпа разгона 14.1, 14.2, 14.3, а выход соединен с задатчиком интенсивности 25, выход которого соединен с электроприводом скипового подъема 24.
За счет предложенного заявленного решения можно в зависимости от массы шихты транспортируемого скипом доменной печи осуществлять индивидуальное изменение темпа разгона и темпа торможения.
Сущность изобретения поясняется чертежами, где:
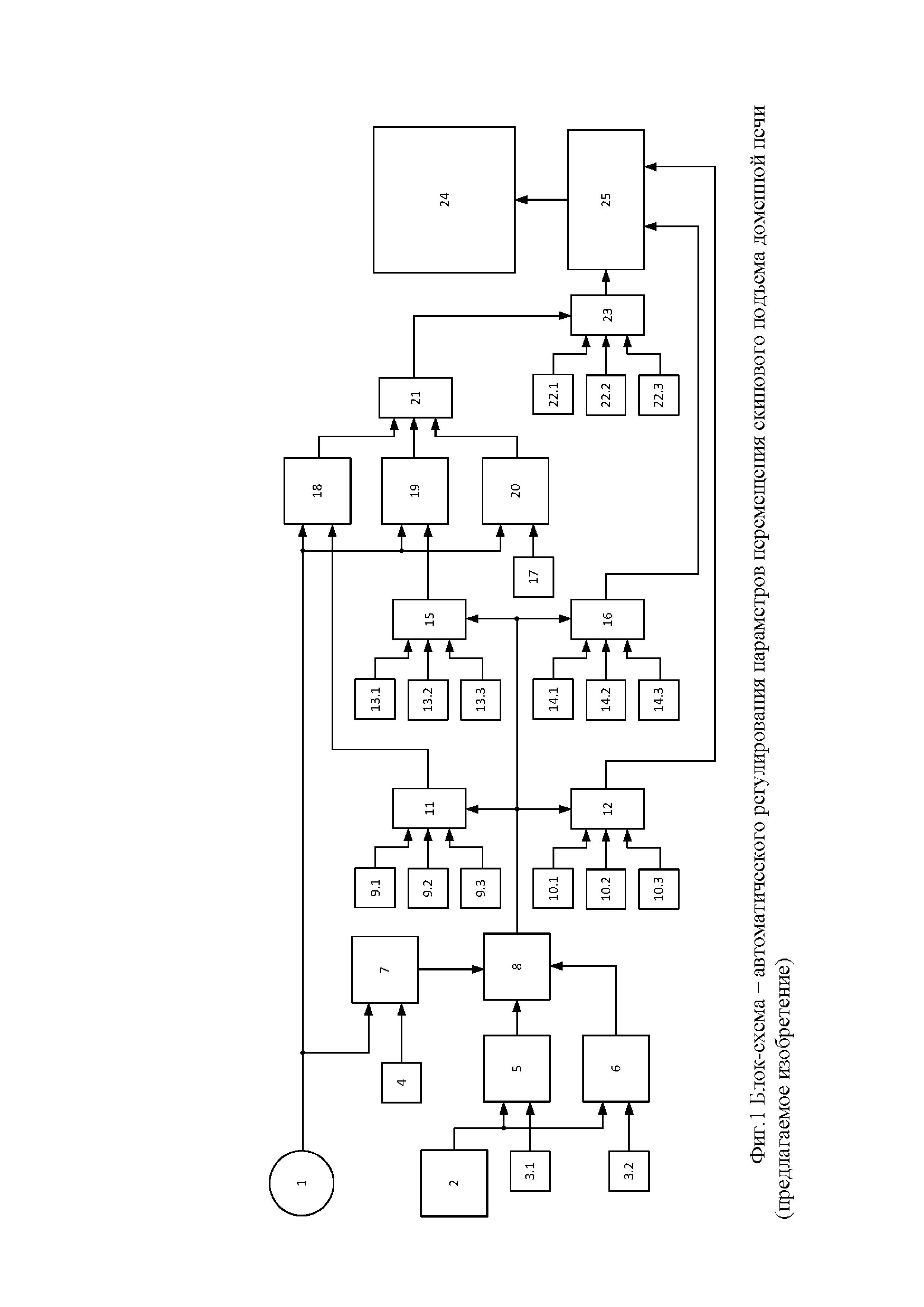
- на Фиг. 1 представлена блок-схема - автоматического регулирования параметров перемещения скипового подъема доменной печи (предлагаемое изобретение);
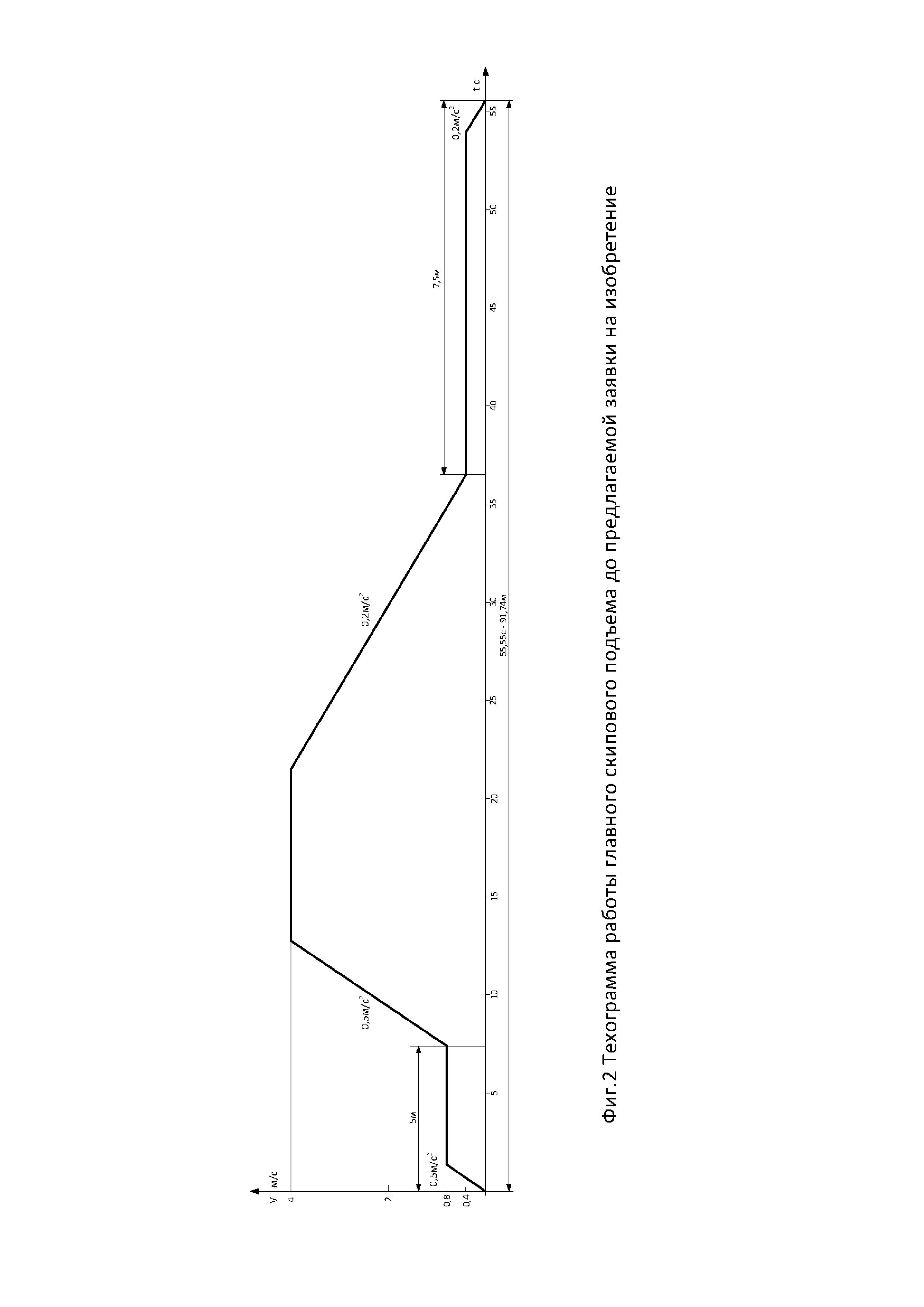
- на Фиг. 2 представлена тахограмма работы главного скипового подъема до предлагаемой заявки на изобретение;
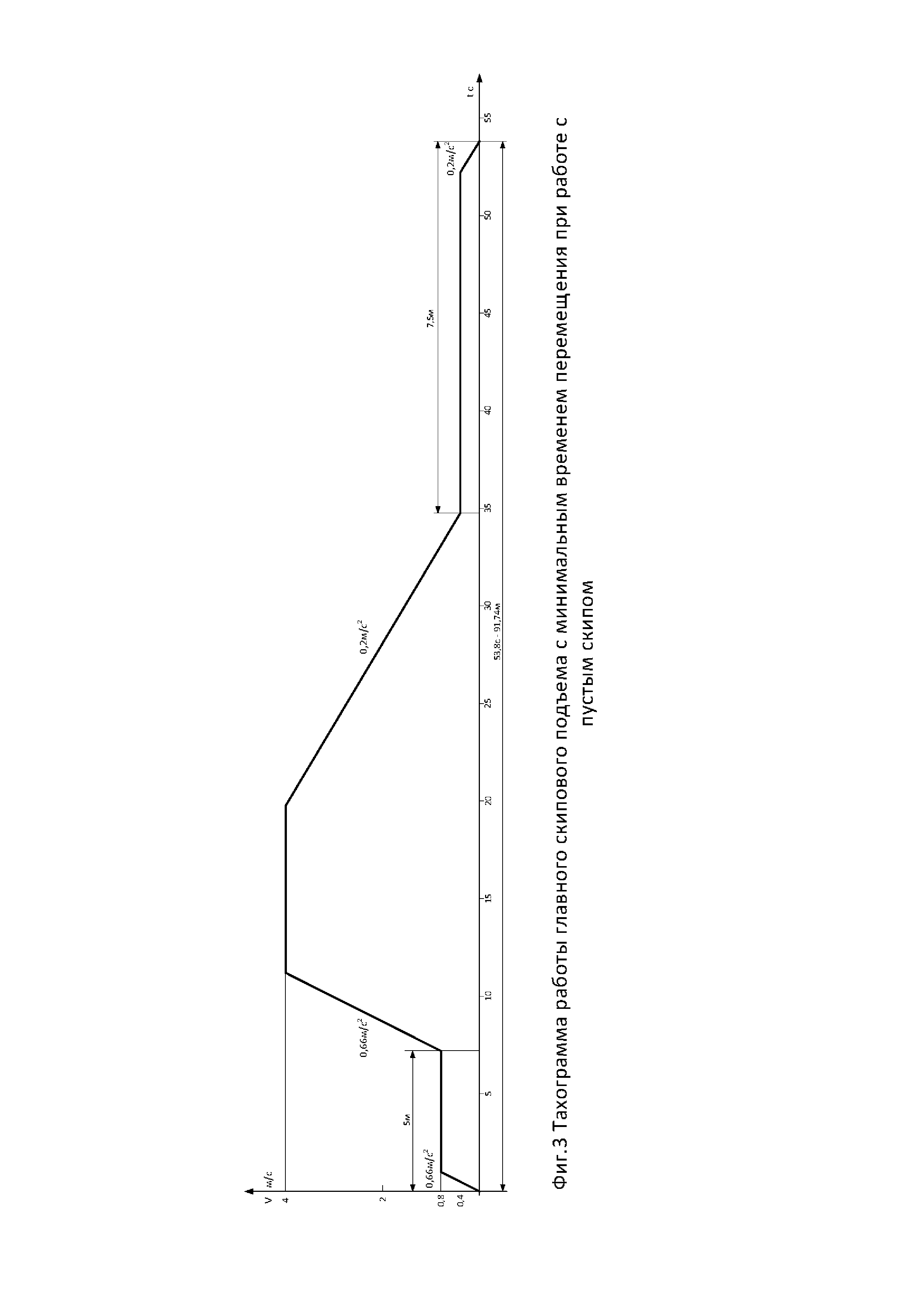
- на Фиг. 3 представлена тахограмма работы главного скипового подъема с минимальным временем перемещения при работе с пустым скипом;
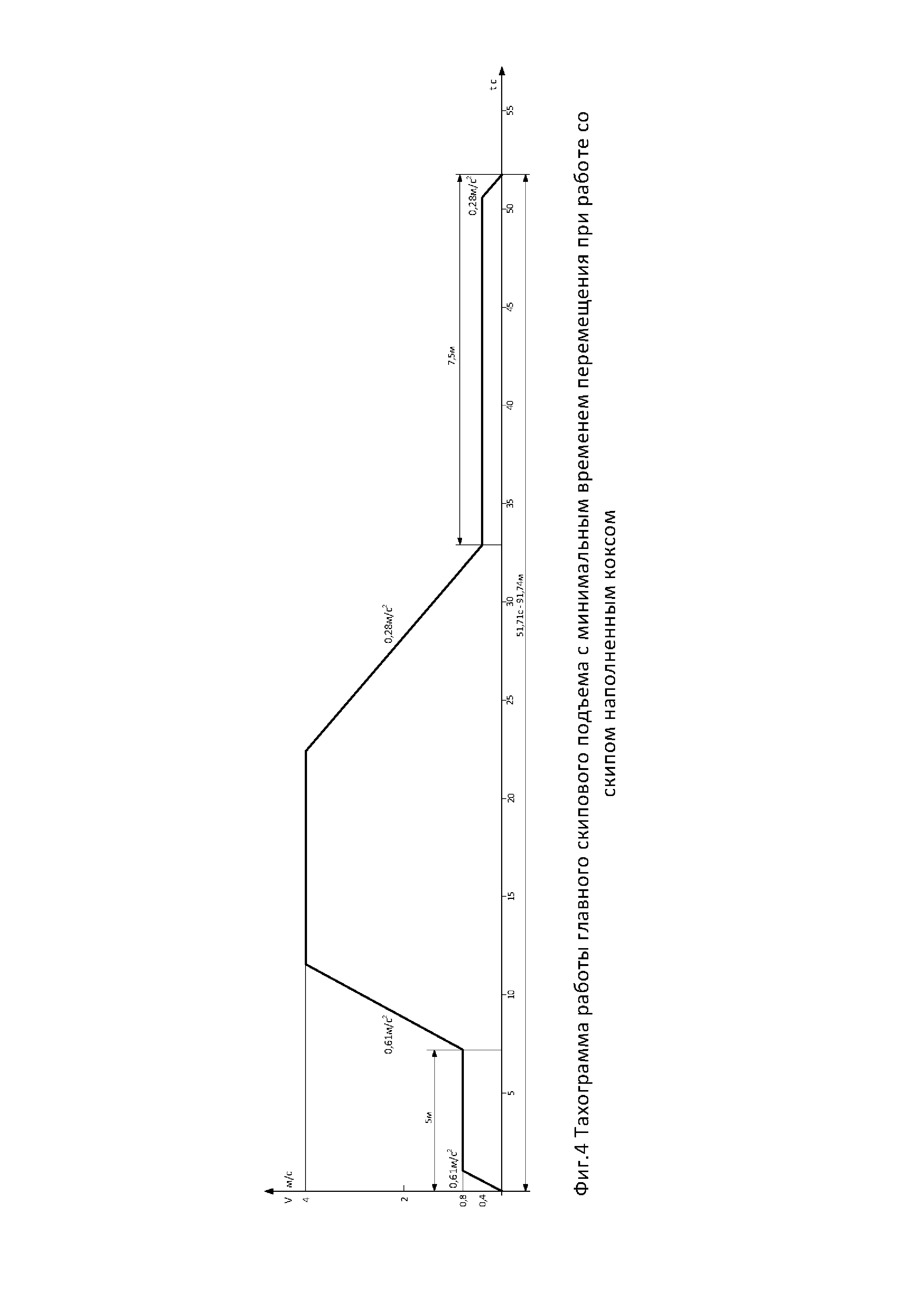
- на Фиг. 4 представлена тахограмма работы главного скипового подъема с минимальным временем перемещения при работе со скипом наполненным коксом;
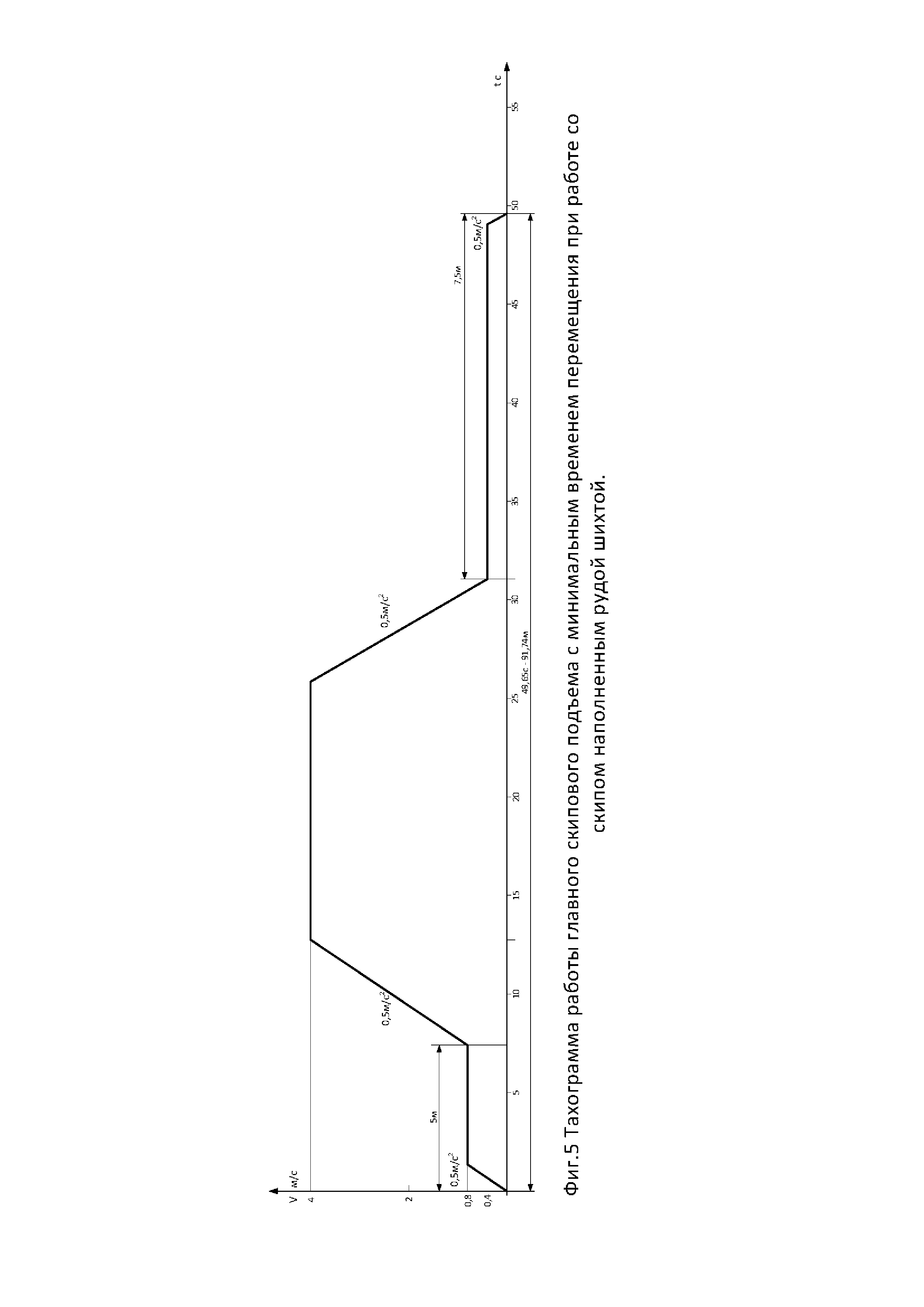
- на Фиг. 5 представлена тахограмма работы главного скипового подъема с минимальным временем перемещения при работе со скипом наполненным рудой шихтой.
Причинно-следственная связь между существенными признаками заявляемого изобретения и достигаемым техническим результатом заключается в следующем.
Скиповый подъем доменной печи предполагает перемещение в трех режимах работы в зависимости от массы транспортируемой шихты в доменную печь:
- подъем пустого скипа без шихты;
- подъем кокса;
- подъем железорудного материал (ЖРМ) и флюсов.
Режим подъема пустого скипа (без шихты) используется во внештатных и ремонтных режимах. Перемещение пустого скипа характеризуется большим моментом инерции при меньшем статистическом моменте трения по сравнению с загруженным скипом. Время торможения пустого скипа без шихты ограничено моментом торможения, в частности допустимой мощностью рассеивания на тормозных резисторах.
Из бункеров загружают в скип до полного заполнения отдельно либо кокс, либо железорудный материал (ЖРМ). Перемещение заполненного скипа либо коксом, либо ЖРМ зависит от массы транспортируемой шихты (кокса или ЖРМ). При этом, чем выше масса шихты в скипе (кокса или ЖРМ), тем меньше динамический момент и тем выше статистический момент. Мощность электропривода и максимально допустимый момент редуктора ограничивают допустимый динамический момент и как следствие ограничивает возможность снижения времени разгона с ЖРМ.
На Фиг. 2 показана техограмма работы главного скипового подъема до предлагаемой заявки на изобретение. Настройка режима производится по наиболее тяжелым режимам с завышенным временем разгона и торможения.
На Фиг. 3, 4, 5 показаны техограммы работы главного скипового подъема во всех трех режимах работы (с пустым скипом, со скипом наполненным коксом, со скипом наполненным рудной шихтой), с оптимальным временем разгона и торможения.
При работе главного скипового подъема имеются технологические ограничения, при которых первые пять метров движения скипа из положения загрузки не должно превышать скорость 0,8м/с, а последние 7,5 м движения до позиции выгрузки - 0,4 м/с. (Фиг. 2-5). Данные ограничения определены конструктивными особенностями лекальной части скипового пути доменных печей. В случае превышения вышеуказанных ограничений возможно механическое разрушение конструкций.
Увеличение минимальной скорости выше номинальной 4 м/с не приводит к значительному снижению времени перемещения, но в свою очередь приводит к увеличению риска аварийного схода скипа и переезда точки остановки.
На Фиг. 1 приведена блок - схема - автоматического регулирования параметров перемещения скипового подъема доменной печи в соответствии с настоящим изобретением, где 1 - датчик положения скипа; 2 - устройство определения механического момента двигателя скипового подъема; 5, 6, 7, 18, 19, 20 - блоки сравнения; 3.1 и 3.2 - уставки сравнения масс; 4, 9.1, 9.2, 9.3, 13.1, 13.2, 13.3 - уставки сравнения положения скипа; 8 - блок памяти выбранного режима; 10.1, 10.2, 10.3 - уставки темпа замедления скипа; 11, 12, 15, 16, 23 селектора; 21 - логический блок выбора заданной скорости; 24 - электропривод скипового подъема; 25 - задатчик интенсивности, 17 уставка положения перехода со скорости в зоне загрузки на повышенную скорость.
Комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи содержит датчик положения скипа 1, один выход которого соединен с блоком сравнения 18, а другой выход соединен с первым входом блока сравнения 7, второй вход последнего соединен с уставкой сравнения положения скипа 4, выход блока сравнения 7 соединен с первым входом блока памяти 8, второй и третий входы соединены с блоком сравнения 5 и 6, причем первый вход блока сравнения 5 соединен с устройством определения механического момента двигателя скипового подъема 2, а второй вход соединен с уставкой сравнения массы 3.1, а блок сравнения 6 на первом входе соединен с устройством определения механического момента двигателя скипового подъема 2 , а на втором входе соединен с уставкой сравнения массы 3.2, при этом выходы блоков сравнения 5, 6, 7 соединены со входом блока памяти 8, выход последнего соединен с селекторами 11, 12, 15, 16, причем вход селектора 11 соединен с тремя выходами уставок сравнения положения скипа 9.1, 9.2, 9.3, а выход селектора 11 соединен с блоком сравнения 18; вход селектора 12 соединен с тремя выходами уставок темпа замедления скипа 10.1, 10.2, 10.3, а выход селектора 12 соединен с задатчиком интенсивности 25, вход селектора 15 соединен с тремя выходами уставок сравнения положения скипа 13.1, 13.2, 13.3, а выход селектора 15 соединен с первым входом блока сравнения 19, второй вход последнего соединен с выходом датчика положения скипа 1, а выход блока сравнения 19 соединен со вторым входом логического блока выбора заданной скорости 21, а первый и третий вход последнего соединен с блоком сравнения 18 и 20, выход блоков сравнения 18, 19 20 соединены с входом логического блока выбора заданной скорости 21, выход последнего соединен с первым входом селектора 23, второй, третий, четвертый входы соединены с тремя выходами уставок заданной скорости 22.1, 22.2, 22.3, а на выходе селектор 23 соединен с первым входом задатчика интенсивности 25, а второй и третий входы соединены с выходами селекторов 12 и 16; вход селектора 16 соединен с тремя выходами уставок темпа разгона 14.1, 14.2, 14.3, четвертый вход соединен с блоком памяти 8, выход селектора 16 соединен с входом задатчика интенсивности 25, выход которого соединен с электроприводом скипового подъема 24.
Описание ссылочных позиционных номеров
1. Датчик положения скипа
2. Устройство определения механического момента двигателя скипового подъема
3.1 Уставки сравнения массы
3.2
где 3.1 - масса скипа загруженного коксом;
3.2 - масса скипа загруженного ЖРМ
4. Уставка сравнения положения скипа
5.
6. Блок сравнения
7.
8. Блок памяти
9.1
9.2 Уставки сравнения положения скипа
9.3
где 9.1 - положение скипа, которое определяет начало полной
остановки в режиме подъема пустого скипа (без шихты);
9.2 - положение начала полной остановки в режиме
транспортировки кокса;
9.3 - положение начала полной остановки в режиме
транспортировки ЖРМ
10.1
10.2 Уставки темпа замедления скипа
10.3
где 10.1 - темп торможения задатчика интенсивности в
режиме пустого скипа без шихты;
10.2 - темп торможения в режиме транспортировки кокса;
10.3 - темп торможения в режиме транспортировки ЖРМ
11. Селектор
12. Селектор
13.1
13.2 Уставки темпа замедления скипа
13.3
где 13.1 - положение скипа, которое определяет начало
перехода скорости на скорость в зоне выгрузки в режиме
пустого скипа без шихты;
13.2 - положение переход с повышенной скорости на
скорость в зоне выгрузки в режиме транспортировки кокса;
13.3 - положение начала переход с повышенной скорости на
скорость в зоне выгрузки в режиме транспортировки ЖРМ
14.1
14.2 Уставки темпа разгона;
14.3
где 14.1 - темп разгона задатчика интенсивности в режиме
подъема пустого скипа без шихты;
14.2 - темп разгона в режиме транспортировки кокса;
14.3 - темп разгона в режиме транспортировки ЖРМ
15. Селектор
16. Селектор
17. уставка положения перехода со скорости в зоне загрузки на повышенную скорость
18.
19. Блок сравнения
20.
21. Логический блок выбора заданной скорости
22.1
22.2 Уставки заданной скорости
22.3
где 22.1 - установившаяся скорость скипа в зоне загрузки
22.2 - максимальная установившаяся скорость скипа
22.3 - установившаяся скорости скипа в зоне выгрузки
23. Селектор
24. Электропривод
25. Задатчик интенсивности.
Способ и комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи работает следующим образом.
Задание скорости на систему регулирования электропривода 24 поступает с задатчика интенсивности 25, который предназначен для формирования необходимого ускорения и замедления скипового подъема.
Источником задания для задатчика интенсивности 25 служит селектор 23, который в зависимости от выхода логического блока выбора заданной скорости 21 определяет выбранную уставку задания: или уставку 22.1 установившуюся скорость скипа в зоне загрузки или уставку 22.2 - максимальную установившуюся скорость скипа, либо уставку 22.3 - установившуюся скорость скипа в зоне выгрузки. Логический блок выбора заданной скорости 21 осуществляет выбор заданной скорости на задатчик интенсивности 25 исходя из выходов блоков сравнения 18, 19, 20, осуществляющих сравнение уставок положения с фактическим положением скипа. Блоки сравнения 18, 19, 20 определяют положение скипа, при этом блок сравнения 20 определяет переход со скорости в зоне загрузки на повышенную скорость, блок сравнения 19 определяет переход с повышенной скорости в зоне загрузки, блок 18 определяет положение начала полной остановки скипа.
Фактическая масса шихты, транспортируемой скипом определяется с помощью устройства определения механического момента двигателя скипового подъема 2 посредством уставок сравнения массы 3.1 и 3.2, которые передают информацию через блоки сравнения 5 и 6 в блок памяти выбранного режима 8, который посредством селекторов 11, 12, 15, 16 выбирает уставки 9.1, 9.2, 9.3, 10.1, 10.2, 10.3, 13.1, 13.2, 13.3, 14.1, 14.2, 14.3 для каждого из трех режимов работы: первый режим подъем пустого скипа без шихты, обозначенный цифрой 1 после названия позиции уставки, второй режим - подъем кокса, обозначенный цифрой 2 после названия позиции уставки , третий режим - подъем ЖРМ, обозначенные цифрой 3 после названия позиции уставки.
В случае определения первого режима Фиг. 3 тахограмма работы главного скипового подъема с минимальным временем перемещения при работе с пустым скипом - на выходе селектора 11 устанавливается значение уставки 9.1 - положение скипа, определяющего начало полной остановки в режиме подъема пустого скипа без шихты; на выходе селектора 12 устанавливается значение уставки 10.1 - темп торможения задатчика интенсивности в режиме подъема пустого скипа без шихты, на выходе селектора 15 устанавливается значение уставки 13.1 - положение скипа, определяющего начало перехода с повышенной скорости на скорость в зоне выгрузки в режиме подъема пустого скипа без шихты, на выходе селектора 16 устанавливается значение уставки 14.1 - темп разгона задатчика интенсивности в режиме подъема пустого скипа без шихты 14.1.
При определении второго режима Фиг. 4 тахограмма работы главного скипового подъема с минимальным временем перемещения при работе со скипом наполненным коксом на выходе селектора 11 устанавливается значение уставки 9.2 - положения начала полной остановки в режиме транспортировки кокса, на выходе селектора 12 устанавливается значение уставки 10.2 - темп торможения в режиме транспортировки кокса, на выходе селектора 15 устанавливается значение уставки 13.2 - положения переход с повышенной скорости на скорость в зоне выгрузки в режиме транспортировки кокса, на выходе селектора 16 устанавливается значение уставки 14.2. - темп разгона в режиме транспортировки кокса.
При определении третьего режима Фиг. 5 тахограмма работы главного скипового подъема с минимальным временем перемещения при работе со скипом наполненным рудой шихтой: на выходе селектора 11 устанавливается значение уставки 9.3 - положение начала полной остановки в режиме транспортировки ЖРМ, на выходе селектора 12 устанавливается значение уставки 10.3 - темп торможения в режиме транспортировки ЖРМ, на выходе селектора 15 устанавливается значение уставки 13.3 - положение начала переход с повышенной скорости на скорость в зоне выгрузки в режиме транспортировки ЖРМ, на выходе селектора 16 устанавливается значение уставки 14.3 - темп разгона в режиме транспортировки ЖРМ.
Блок памяти выбранного режима 8 фиксирует выбранный режим работы (первый режим - работа с пустым скипом, второй режим - работа скипа с коксом, третий режим - работа скипа с ЖРМ) до начала следующего цикла перемещения, который определяется выходом блока сравнения 5, 6, 7, 18, 19, 20 если фактическое положение скипа находится в зоне начального положения - уставка 4. Начальное положение характеризуется достижением уставки положения - 4 при котором происходит сброс блока памяти выбранного режима 8.
Измеренное значение в устройстве определения механического момента двигателя скипового подъема 2 сравнивается с уставками массы скипа загруженного коксом 3.1 и уставкой массы скипа загруженного ЖРМ 3.2., тем самым определяется к какому режиму загрузки относится перемещение. Если масса шихты не превышает уставку скипа загруженного коксом 3.1 скип считается пустым.
Масса шихты может быть определена любым из известных прямых и косвенных способов измерения массы, включая измерение по статическому моменту или электрическому току нагрузки электропривода. К косвенным методам измерения стоит относить и использование сигналов открытия соответствующих бункеров во время загрузки шихты в скип. Так как каждому бункеру соответствует материал определенной плотности это позволяет классифицировать в каком режиме загрузки по массе скип будет выполнять перемещение.
Во втором варианте реализации при измерении массы во время движения по вращающему моменту или электрическому току нагрузки электропривода 24 разгон осуществляется с минимальным временем (показать значение?) разгона соответствующем разгону без шихты. Ограничение на вращающий момент автоматически увеличит время разгона в случае достижения максимального момента. Таким образом, на момент разгона не обязательно располагать данными о массе шихты для формирования оптимального разгона с точки зрения времени цикла загрузки. В этом случае массу рационально вычислить в режиме установившегося движения. (установившееся движение подразумевает отсутствие ускорения или замедления в этот период)» Статический момент привода равен сумме активного момента подъема груза и момента трения. Оба слагаемых пропорционально возрастают с ростом массы шихты. Таким образом, соответственно измеренной массе шихты, устанавливаются значение времени торможения и остатка пути, с которого необходимо начинать торможение электропривода для остановки скипа в заданной точке пути.
Анализ патентов и научно-технической информации не выявил использования новых существенных признаков, используемых в предлагаемом решении. Следовательно, предлагаемое изобретение соответствует критерию «изобретательский уровень».
Таким образом, данное техническое решение соответствует критерию «новизна».
Использование заявленного способа и комплекса автоматического регулирования параметров перемещения скипового подъема доменной печи позволяет обеспечивать сокращение времени транспортировки шихты на 4 секунды и снизить время цикла загрузки на 5%.
На сегодняшний день производительность скипового подъема не ограничивает общую производительность доменной печи. Потенциально при снятии ограничения производительности на бесконусном загрузочном устройстве (БЗУ) и других технологических ограничений, применение указанного способа управления скипового подъема позволит достигнуть увеличения производительности доменной печи до 5%.
Источник информации
[1] Патент RU №2101226, МПК B66B 1/24, B66B 9/06, B66B 17/32опубликованного 10.01.1998;
[2] Заявка на патент RU №2010119465 МПК B66B 9/06, дата публикации 27.11.2011, бюл. №33);
[3] Патент RU №2231030 МПК G01G 19/18, опубликованного 20.06.2004, бюл. №17.
Реферат
Предложен способ автоматического регулирования параметров перемещения скипового подъема доменной печи с помощью системы регулирования электропривода (24), соединенной с задатчиком интенсивности (25), обеспечивающим формирование необходимого ускорения и замедления скипового подъема. Задание скорости поступает на селектор (23), который в зависимости от выхода логического блока заданной скорости (21) определяет выбранную уставку задания установившейся скорости скипа в зоне загрузки (22.1) или максимальной установившейся скорости скипа (22.2), или установившейся скорости скипа в зоне выгрузки (22.3), сравнивает положения уставок с фактическим положением датчика положения скипа (1) через блоки сравнения: положения начала полной остановки скипа (18), перехода с повышенной скорости на скорость в зоне загрузки (19), перехода со скорости в зоне загрузки на повышенную скорость (20). При этом сравнивая на блоках сравнения (5) и (6) значение с выхода устройства определения механического момента двигателя скипового подъема (2) с уставками (3.1) и (3.2), предназначенными для определения массы. В момент установившегося движения скипа в зоне загрузки, определяемого блоком сравнения (7) на основании выхода датчика положения скипа (1) и уставки сравнения положения скипа (4), фиксируют значение выходов блоков сравнения (5) и (6) в блоке памяти выбранного режима (8) до начала следующего цикла загрузки. Для каждого из выбранного режима загрузки скипового подъема, а именно: для работы скипа при подъеме пустого скипа без шихты; при подъеме кокса; при подъеме железорудного материала (ЖРМ), посредством селекторов (11, 12, 15, 16) выставляют индивидуальные уставки: (9.1, 9.2, 9.3) - положение скипа, определяющее начало торможения скипа до полной остановки, (10.1, 10.2, 10.3) – уставки темпа торможения; (13.1, 13.2, 13.3), - положение скипа, определяющее начало перехода с повышенной скоростью на скорость в зоне выгрузки, (14.1, 14.2, 14.3) – уставки темпа разгона задатчика интенсивности для блока сравнения (18, 19) и задатчика интенсивности (25). При этом значение уставки (17) положения перехода со скорости в зоне загрузки на повышенную скорость остается неизменным для всех режимов. Предложен также комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи. Достигается снижение времени транспортировки. 2 н.п. ф-лы, 5 ил.
Комментарии