Привод затвора подъемного сосуда - RU181986U1
Код документа: RU181986U1
Чертежи
Описание
Полезная модель относится к горнодобывающей промышленности, в частности к устройствам для разгрузки шахтного скипа.
Известна «Полноавтоматическая разгрузочная система вертикальной шахты» CN 103193144 [2], включающий сенсорный выключатель, разгрузочное устройство, линию автоматического управления, скиповый ковш, разгрузочный затвор расположен с одной стороны на нижней части ковша, разгрузочное устройство содержит цилиндр, направляющую для изгиба и отклоняющий крюк, причем один конец отключающего крюка шарнирно соединен с поршнем цилиндра, а другой конец отключающего крюка скользит в направляющей.
Недостатком устройства являются повышенные габариты устройства, а также большие изгибающие воздействия на поршень цилиндра, что приводит к снижению надежности устройства.
Наиболее близким техническим решением является «Разгрузочное устройство шахты» GB 1537936 [1], содержащее привод шторки подъемного сосуда, содержащего захватывающие средства, расположенные на станции выгрузки сосуда гидроцилиндр, соединенный шарниром с гидроцилиндром каретку с захватывающим элементом, криволинейную направляющую, в которой скользят два подшипника, закрепленные на каретке с интервалом между подшипниками.
Наличие двух подшипников снижает изгибающее воздействие на поршень цилиндра.
Недостатком является повышенные габариты устройства.
Техническим результатом предлагаемой полезной модели является снижение габаритов устройства.
Технический результат достигается тем, что привод затвора (шторки) подъемного сосуда, содержащего захватывающие средства, расположенные на станции выгрузки сосуда (гидро или пневмо) цилиндр, соединенный шарниром со штоком цилиндра каретку с захватывающим элементом (крюком), криволинейную направляющую, в которой скользят два подшипника, закрепленные на каретке с интервалом, характеризуется тем, что захватывающий элемент расположен на конце каретки, (за пределами интервала между подшипниками).
Проушина гидроцилиндра (расположенная на пятке) может устанавливаться шарнирно, что позволит снизить изгибающие усилия на гидроцилиндр.
Криволинейная направляющая может состоять из двух зеркально симметричных П-образных профилей, скрепленных крепежом, позволяя выполнить устройство из доступных стандартных элементов.
Цилиндр может быть гидравлическим, что позволит реализовать устройство с применением широко распространенных комплектующих.
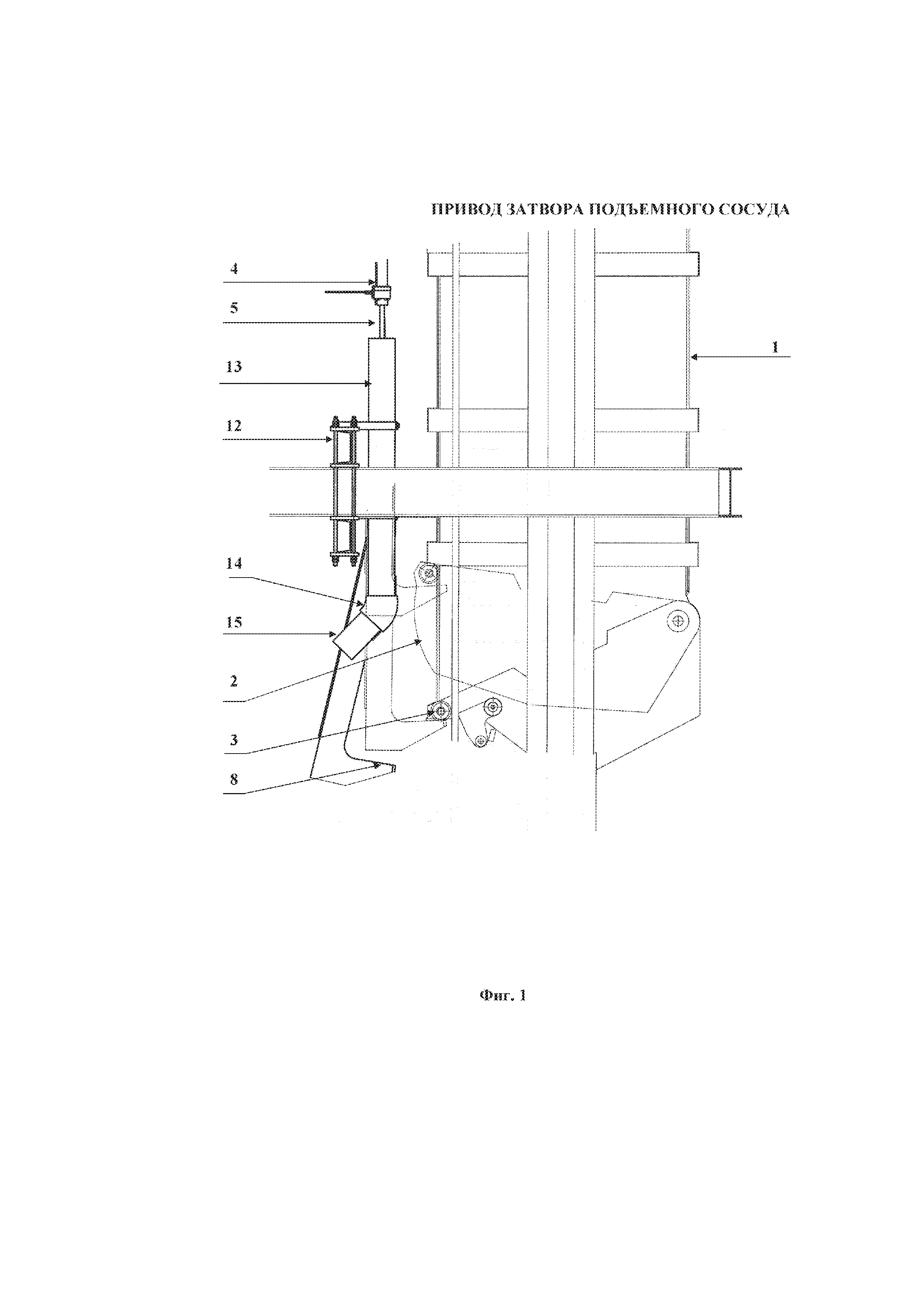
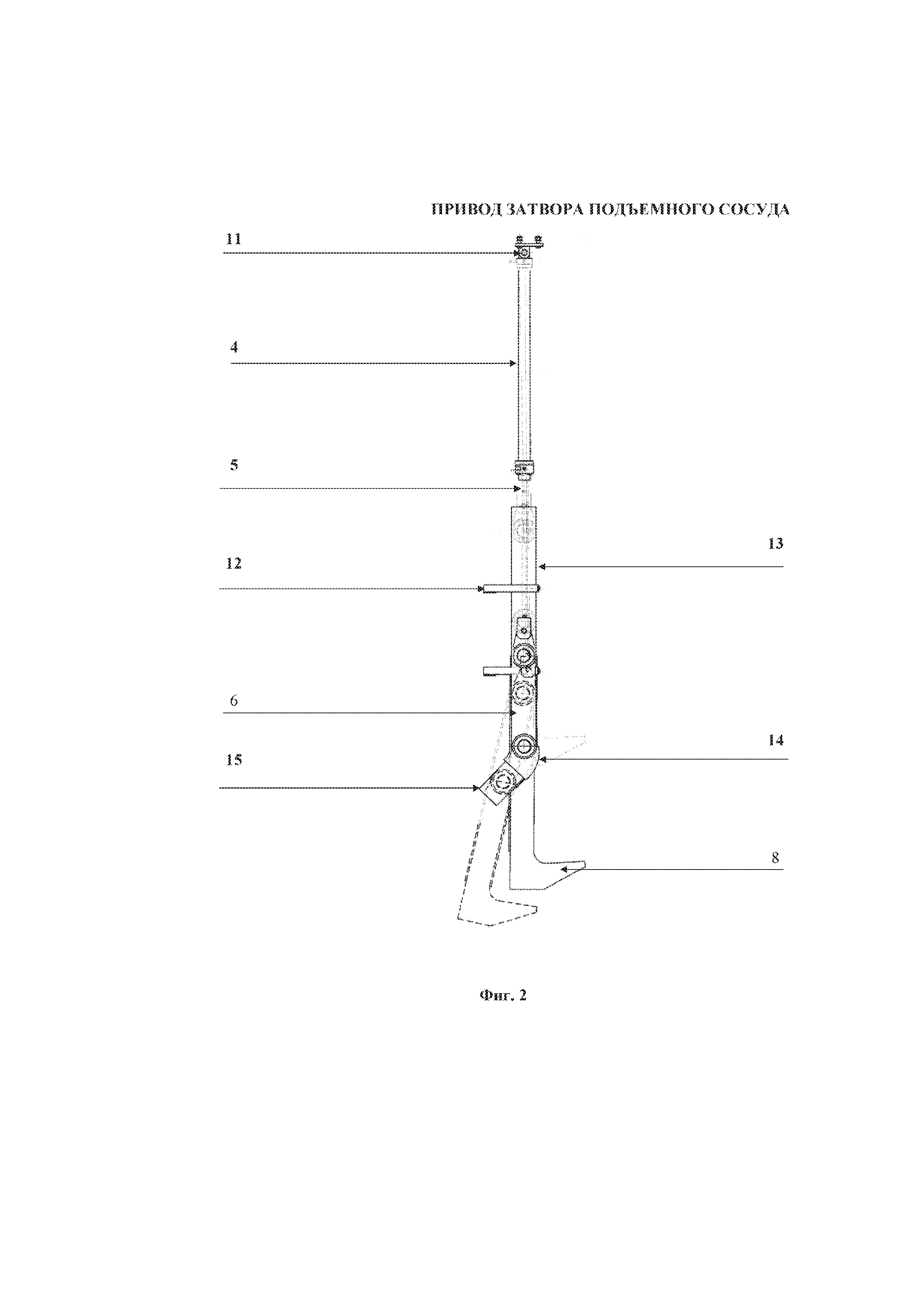
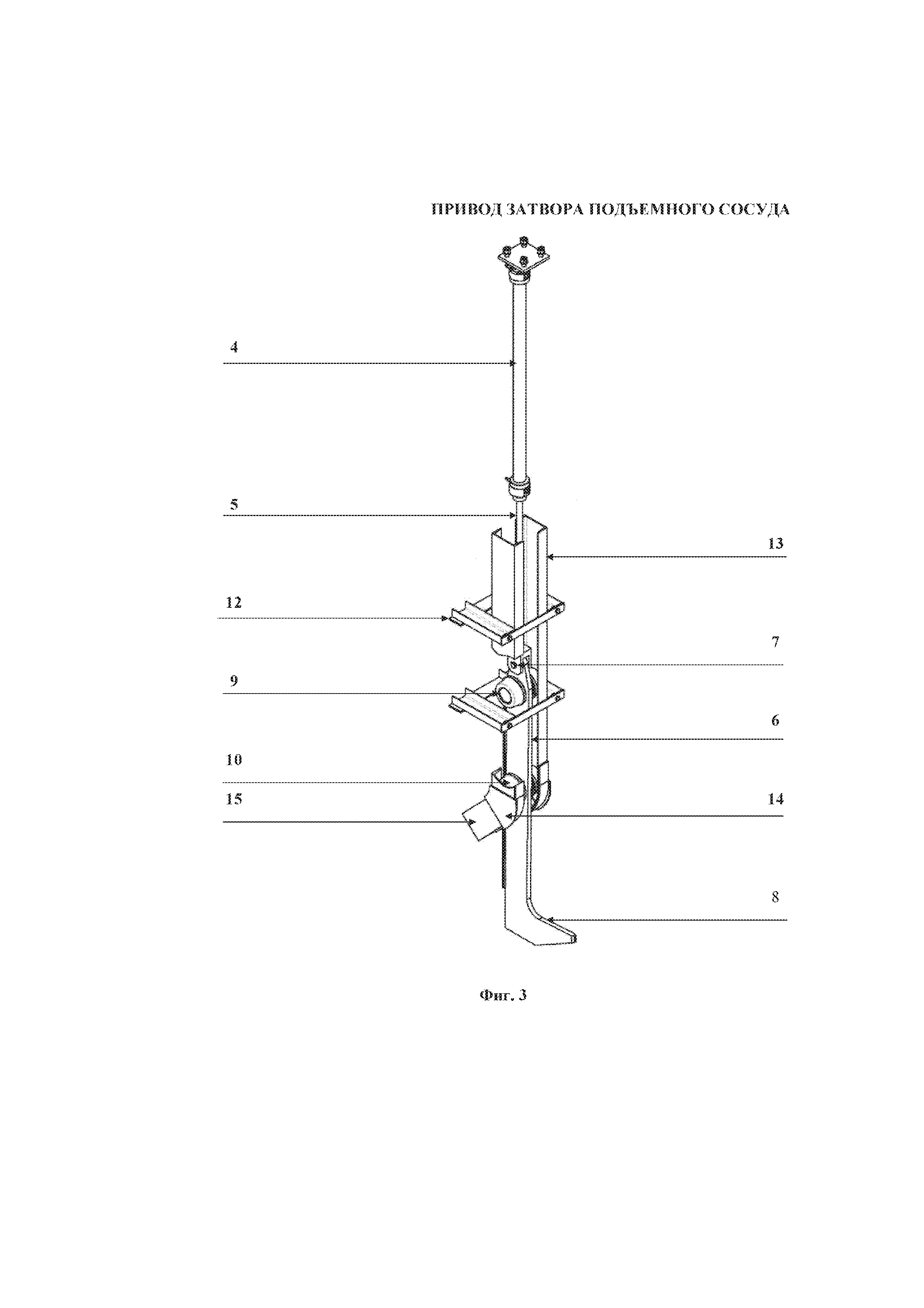
Привод затвора подъемного сосуда показан на фиг. 1 (разрез с сосудом и затвором, пунктиром показано положение открытого затвора положение захватывающего элемента при подходе к захватывающему средству, сплошной линией отведенное положение), фиг. 2 (вид привода сбоку, пунктирами показаны положения отведенного захватывающего элемента и положение при подъеме затвора, сплошной линией промежуточное положение захватывающего элемента), фиг. 3 (общий вид с частичным разрезом привода в положении подхода захватывающего элемента к захватывающему средству), где:
1 – подъемный сосуд;
2 – затвор;
3 – захватывающее средство;
4 – цилиндр;
5 – шток цилиндра;
6 – каретка;
7 – шарнир между штоком и кареткой;
8 – захватывающий элемент;
9 – первый подшипник;
10 – второй подшипник;
11 – шарнир проушины цилиндра;
12 – крепеж направляющей;
13 – вертикальный участок направляющей;
14 – участок изгиба направляющей;
15 – наклонный участок направляющей.
На подъемном сосуде 1 расположен затвор, например, секторный, на котором расположено захватывающее средство 3, например, в виде ролика. Стационарно, на участке разгрузки, любым известным способом, закреплена проушина цилиндра 4, например, посредством шарнира проушины цилиндра 11. К штоку цилиндра 5 присоединена каретка 6 посредством шарнира между штоком и кареткой 7. На конце каретки расположен захватывающий элемент 8. Каретка скользит посредством подшипников 9 и 10 по криволинейной направляющей, закрепленной на горизонте посредством крепежа направляющей 12. Первый подшипник 9 закреплен вблизи шарнира между штоком и кареткой 7, второй подшипник закреплен в центральной части каретки. Криволинейная направляющая имеет вертикальный участок 13, наклонный участок 15 соединенные участком изгиба 14. Механизм привода может иметь положение с наиболее выдвинутым штоком – положение отведенного захватывающего элемента, второй подшипник 10 находится вблизи нижнего конца наклонного участка направляющей, каретка при этом наклонена и подъемный сосуд беспрепятственно проходит мимо захватывающего элемента (крюка). В промежуточном положении штока имеется состояние подхода захватывающего элемента к захватывающему средству, при котором каретка параллельна штоку, подшипник 10 расположен внутри участка изгиба направляющей 10, а захватывающий элемент находится в области захватывающего средства закрытого затвора подъемного сосуда, указанное положение показано на Фиг.3. В положении наиболее втянутого штока подшипник 9 расположен у верхнего края направляющей, подшипник 10 расположен внутри вертикального участка направляющей, затвор подъемного сосуда открыт.
Устройство действует следующим образом: Процесс открывания затвора осуществляется автономным гидравлическим приводом, стационарно установленным в копре в зоне разгрузки.
В исходном положении штоки гидроцилиндров выдвинуты - датчики положения штоков (ДПШ), включены, насосная станция обеспечивает номинальное рабочее давление - датчик давления (ДД) включен. Насосная станция и датчики применяются любые известные и не показаны.
При срабатывании датчика открытого положения фиксатора затвора (ДОПФ) и датчика точной остановки груженого подъемного сосуда (например, скипа) в месте разгрузки формируется сигнал на электрогидрораспределитель, который переключается в положение, когда давление жидкости поступает в штоковую полость гидроцилиндров. Втягивание штоков гидроцилиндров вызывает перемещение захватывающих элементов (захватов) 8, которые входят в зацепление с захватывающими средствами (например роликами) 3, находящимися на секторном затворе, и начинают открывать его. При полном открывании затвора срабатывает датчик конечного положения (ДОПЗ), формируется сигнал на отключение электрогидрораспределителя, при этом подача давления в штоковую полость прекращается. Одновременно включается реле времени для обеспечения полной разгрузки скипа (ориентировочно 2...4 секунды, эта величина уточняется и устанавливается в процессе пробной эксплуатации). После этого формируется сигнал на переключение электрогидрораспределителя в другое положение и осуществляется подача давления в поршневую полость гидроцилиндра, при этом затвор закрывается, срабатывает датчик закрытого положения затвора (ДЗПЗ) и захваты отходят от затвора скипа, замыкая датчик конечного положения штока гидроцилиндра (ДПШ). Включенные датчики ДЗПЗ и ДПШ формируют сигнал на подъемную машину и разрешение на опускание порожнего скипа.
Технический результат – снижение габаритов устройства достигается тем, что для отведения захватывающего устройства в режиме перемещения подъемного сосуда необходим меньший ход штока цилиндра благодаря расположению захватывающего элемента на конце каретки и при аналогичном положении каретки второй подшипник находится ближе к оси штока цилиндра. Уменьшение хода штока цилиндра кроме снижения габаритов приводит к сопутствующим техническим результатам – снижению энергозатрат за счет снижения величины хода штока, и снижению металлоемкости за счет снижения массы цилиндра.
Промышленная применимость. Заявляемое конструкторско-техническое решение может с успехом применяться для изготовления приводов затворов подъемных сосудов.
Реферат
Полезная модель относится к горнодобывающей промышленности, в частности к устройствам для разгрузки шахтного скипа.Техническим результатом предлагаемой полезной модели является снижение габаритов устройства. Технический результат достигается тем, что привод затвора (шторки) подъемного сосуда, содержащего захватывающие средства, расположенные на станции выгрузки сосуда (гидро или пневмо) цилиндр, соединенный шарниром со штоком цилиндра каретку с захватывающим элементом (крюком), криволинейную направляющую, в которой скользят два подшипника, закрепленные на каретке с интервалом, характеризуется тем, что захватывающий элемент расположен на конце каретки, (за пределами интервала между подшипниками).Проушина гидроцилиндра может устанавливаться шарнирно. Криволинейная направляющая может состоять из двух зеркально симметричных П-образных профилей, скрепленных крепежом. Цилиндр может быть гидравлическим.Технический результат – снижение габаритов устройства достигается тем, что для отведения захватывающего устройства в режиме перемещения подъемного сосуда необходим меньший ход штока цилиндра благодаря расположению захватывающего элемента на конце каретки и при аналогичном положении каретки второй подшипник находится ближе к оси штока цилиндра. Уменьшение хода штока цилиндра кроме снижения габаритов приводит к сопутствующим техническим результатам – снижению энергозатрат за счет снижения величины хода штока, и снижению металлоемкости за счет снижения массы цилиндра.Заявляемое конструкторско-техническое решение может с успехом применяться для изготовления приводов затворов подъемных сосудов.
Комментарии