Автоматизированное монтажное устройство для осуществления установки подъемного устройства в шахте лифта - RU2715066C2
Код документа: RU2715066C2
Чертежи



Описание
Данное изобретение относится к монтажному устройству, с помощью которого можно осуществлять процессы монтажа подъемного устройства в шахте лифта. Изобретение относится, кроме того, к способу осуществления процесса монтажа подъемного устройства в шахте лифта.
Изготовление подъемного устройства и, в частности, осуществляемая для этого установка конструктивных элементов подъемного устройства внутри шахты лифта в здании связана с значительной трудоемкостью и/или высокими затратами, так как внутри шахты лифта нужно монтировать множество конструктивных элементов в различных позициях.
Этапы монтажа, с помощью которых, например, конструктивный элемент устанавливают в ходе процесса монтажа внутри шахты лифта, осуществляются до настоящего времени в большинстве случаев техниками или монтажными специалистами. При этом обычно специалист отправляется на позицию внутри шахты лифта, на которой следует устанавливать конструктивный элемент, и устанавливает на ней конструктивный элемент в нужном месте, например, просверливая отверстия в стене шахты и фиксируя конструктивный элемент с помощью завинчивания в эти отверстия винтов или вставляемых болтов в стену шахты. Для этого он может использовать рабочий инструмент и/или машины.
В частности, в очень длинных подъемных устройствах, то есть, в так называемых "высотных лифтах", с помощью которых нужно преодолевать большие разницы высот в высоких зданиях, количество монтируемых в шахте лифта конструктивных элементов может быть довольно большим, а поэтому процессы монтажа связаны с значительной трудоемкостью установки, а также большими затратами при монтаже.
В публикации JP 3 214801 B2 описывается монтажное устройство для выравнивания в шахте лифта направляющих рельсов для кабины лифта. Посредством монтажного устройства специалисты по монтажу выравнивают предварительно собранные направляющие рельсы в шахте лифта и фиксируют их на установленных в шахте лифта поддерживающих профилях в виде элементов кронштейна. Для этого монтажное устройство снабжено завинчивающим устройством, являющимся интегральной составной частью монтажного устройства. Кроме того, монтажное устройство имеет фиксирующее устройство, посредством которого монтажное устройство может опираться сбоку на один из установленных специалистом по монтажу элементов кронштейна.
В публикациях JP3034960B2, JPH07151119A и JP3214801B2 описаны подобные монтажные устройства.
Поэтому может возникать потребность в уменьшении трудоемкости и/или затрат при установке конструктивных элементов внутри шахты лифта подъемного устройства. Кроме того, может потребоваться, например, сокращение рисков несчастных случаев персонала во время процессов монтажа внутри шахты лифта подъемного устройства. Вдобавок к этому, может возникнуть необходимость, например, осуществления процессов монтажа в шахте лифта в течение более короткой продолжительности времени.
По меньшей мере, монтажное устройство или способ монтажа может соответствовать одной из указанных потребностей согласно независимым пунктам формулы изобретения.
Предпочтительные варианты формы исполнения изобретения определены в зависимых пунктах формулы изобретения, а также в последующем описании.
Согласно одному аспекту изобретения предлагается монтажное устройство для осуществления процесса монтажа в шахте лифта подъемного устройства. Монтажное устройство имеет несущий компонент и мехатронный монтажный компонент. Несущий компонент сконструирован для перемещения относительно шахты лифта, т.е., например, внутри шахты лифта и позиционирования на различных высотах внутри шахты лифта. Монтажный компонент фиксирован на несущем компоненте и сконструирован для осуществления этапа монтажа в рамках процесса монтажа, по меньшей мере, полуавтоматически, предпочтительно – полностью автоматически. Согласно изобретению, монтажный компонент сконструирован для, по меньшей мере, управляемого полуавтоматического сверления отверстий в стене шахты лифта в качестве этапа монтажа.
Монтажный компонент может использовать для этого соответствующий сверлильный инструмент. Как инструмент, так и сам монтажный компонент должны иметь соответствующее исполнение, чтобы удовлетворять возникающим условиям.
Согласно изобретению монтажное устройство имеет компонент детектирования арматуры, сконструированный для обнаружения арматуры внутри стены шахты лифта.
Возможные признаки и преимущества форм исполнения изобретения могут рассматриваться, основываясь, в том числе, на описываемых в последующем идеях и сведениях, однако, тем не менее, не ограничивая этим объем изобретения.
Как приведено во вступлении, является фактом, что процессы монтажа конструктивных элементов внутри шахты лифта подъемного устройства могут быть связаны с значительной трудоемкостью, поскольку осуществляются до настоящего времени большей частью людьми из числа специалистов по монтажу. В зависимости от размера подъемного устройства, а вследствие этого, от количества монтируемых конструктивных элементов, монтаж всех необходимых для подъемного устройства конструктивных элементов внутри шахты лифта зачастую может продолжаться более нескольких дней или даже нескольких недель.
Сверление отверстий в стене шахты лифта подъемного устройства, состоящей в большинстве случаев из бетона, в частности, железобетона, физически довольно утомительно для людей из числа специалистов по монтажу. При бурении возникают грязь и шум и, кроме того, вокруг появляются мелкие частицы стены. Все это может причинять вред здоровью специалистам по монтажу. Поэтому особенно предпочтительно, если этап монтажа сверления осуществляется монтажным устройством автоматически или, по меньшей мере, полуавтоматически. В частности, в этом случае не является обязательным присутствие в шахте лифта во время сверления специалистов по монтажу, что не несет с собой опасности нанесения вреда их здоровью.
В основе форм исполнения изобретения лежит в том числе идея возможности, по меньшей мере, частично автоматического осуществления процессов монтажа внутри шахты лифта подъемного устройства с помощью соответственно выполненного монтажного устройства. Разумеется, что предпочтительной была бы полная автоматизация осуществляемых при этом этапов монтажа.
Часто повторяющиеся в ходе процессов монтажа этапы монтажа, в частности, многократно осуществляемые при установке подъемного устройства этапы монтажа, могут происходить автоматически. Например, обычно при установке направляющего рельса внутри шахты лифта нужно фиксировать множество поддерживающих профилей на стенах шахты лифта, причем для этого сначала, например, во многих местах вдоль шахты лифта, должны сверлиться отверстия, а затем соответственно привинчивают поддерживающий профиль.
C целью автоматизации предлагается предусматривать монтажное устройство, имеющее, с одной стороны, несущий компонент, а, с другой стороны, фиксированный на этом несущем компоненте мехатронный монтажный компонент.
Несущий компонент может быть выполнен разными способами. Например, несущий компонент может быть выполнен в виде простой платформы, рамы, остова, кабины или подобной им модели. Для этого габаритные размеры несущего компонента должны быть выбраны такими, чтобы несущий компонент мог без проблем устанавливаться в шахту лифта и перемещаться внутри нее. Механическую конструкцию несущего компонента необходимо выбирать такой, чтобы она надежно несла фиксированный на ней мехатронный монтажный компонент, а при необходимости могла противостоять приложенным монтажным компонентом статическим и динамическим усилиям.
Монтажный компонент должен быть мехатронным, то есть, иметь взаимодействующие механические, электронные и информационно-технические элементы или модули. Например, монтажный компонент должен иметь соответствующую механику, например, для возможности манипулирования во время этапа монтажа рабочими инструментами. Для этого рабочие инструменты могут доставляться механикой, например, в монтажное положение и/или направляться, как это необходимо, во время этапа монтажа. Рабочие инструменты могут снабжаться посредством монтажного компонента энергией, например, в виде электрической энергии. Но также возможно, что рабочие инструменты располагают собственным энергоснабжением, например, батареями, аккумуляторами, или отдельным энергопитанием по кабелю.
Альтернативно монтажный компонент может располагать даже механикой в виде рабочего инструмента.
Электронные элементы или модули мехатронного монтажного компонента могут служить, например, как это требуется, для управления механическими элементами или модулями монтажного компонента или контроля. Такие электронные элементы или модули могут служить, таким образом, например, в качестве блока управления для монтажного компонента.
Кроме того, монтажный компонент может располагать информационно-техническими элементами или модулями, с помощью которых можно сделать вывод, например, о том, в какое положение следует доставить рабочий инструмент и/или, как рабочий инструмент должен приводиться в нем в действие и/или направляться во время этапа монтажа.
Взаимодействие между механическими, электронными и информационно-техническими элементами или модулями должно происходить при этом так, чтобы во время процесса монтажа, по меньшей мере, один этап монтажа мог осуществляться монтажным устройством полуавтоматически или полностью автоматизировано.
Кроме того, в несущем компоненте могут быть предусмотрены направляющие элементы, с помощью которых направляют несущий компонент во время вертикального перемещения внутри шахты лифта вдоль одной или нескольких стен шахты лифта. Направляющие элементы могут быть выполнены, например, в виде опорных роликов, перекатывающихся по стенам шахты лифта. В зависимости от компоновки опорных роликов в несущем компоненте могут быть предусмотрены от одного, в частности, до четырех опорных роликов.
Также возможно, что внутри шахты лифта натянуты направляющие тросы, используемые для направления несущего компонента. Кроме того, также могут временно устанавливаться направляющие рельсы для направления несущего компонента в шахте лифта. Более того, возможно, что несущий компонент подвешен с помощью двух или более нагружаемых, с возможностью изгиба несущих средств, например, тросов, цепей или ремней.
Согласно одной форме исполнения изобретения мехатронный монтажный компонент имеет промышленного робота.
Под промышленным роботом понимают универсальную, в большинстве случаев программируемую машину для манипулирования, монтажа и/или обработки деталей и конструктивных элементов. Такие роботы спроектированы для использования в промышленной среде и используются до настоящего времени, например, в промышленном штучном производстве сложных продуктов в больших объемах, например, в автомобильном производстве.
Обычно промышленный робот имеет так называемый манипулятор, или так называемый исполнительный элемент и блок управления. Манипулятор может представлять собой, руку робота, например, с возможностью поворота вокруг одной или нескольких осей и/или с возможностью перемещения вдоль одного или нескольких направлений. Исполнительный элемент может быть, например, рабочим инструментом, захватом или подобным элементом. Блок управления может служить для управления манипулятором и/или исполнительным элементом, как это необходимо, то есть, например, перемещать и/или направлять его.
Промышленный робот сконструирован, в частности, для присоединения к своему свободнонесущему концу различных монтажных инструментов. Другими словами, манипулятор сконструирован для соединения с различными исполнительными элементами. Это обеспечивает особенно универсальное использование промышленного робота, а вместе с ним и монтажного устройства.
Блок управления промышленного робота имеет, в частности, так называемый исполнительный элемент и компьютерный блок управления. Компьютерный блок управления выполняет собственные расчеты для требуемых движений промышленного робота и посылает команды управления для включения отдельных электромоторов промышленного робота в исполнительный элемент, преобразующий их затем в конкретные включения электромоторов. Исполнительный элемент расположен, в частности, на несущем компоненте, тогда, как компьютерный блок управления расположен не на несущем компоненте, а в шахте лифта или рядом с ней. Если бы исполнительный элемент не был расположен на несущем компоненте, то через шахту лифта к промышленному роботу направлялось бы множество кабельных соединений.
При компоновке исполнительного элемента на несущем компоненте для промышленного робота предусматривают преимущественно только энергопитание и беспроводную связь для передачи данных, например, в виде соединения "Эзернет " между компьютерным блоком управления и исполнительным элементом, в частности, через указанный подвесной кабель. Это обеспечивает особенно простое кабельное соединение, кроме всего прочего, очень прочное и мало подверженное неисправностям из-за небольшого количества кабелей. Могут быть реализованы и другие функции, например, контроль безопасности в блоке управления промышленного робота, для чего могут потребоваться другие кабельные соединения между компьютерным блоком управления и исполнительным элементом.
Промышленный робот может располагать также так называемой "пассивной вспомогательной рукой", с возможностью ее передвижения только вместе с рукой робота, и, в частности, имеет устройство для удерживания конструктивного элемента, например, скобы. Для закрепления скобы на стене шахты лифта рука робота может передвигаться, например, таким образом, что скоба принимается пассивной вспомогательной рукой и удерживается в правильном положении при непосредственном закреплении на стене, например, посредством винта.
Часто промышленные роботы оборудуют также различными датчиками, с помощью которых они могут распознавать информацию, например, об окружающей обстановке, условиях работы, обрабатываемых конструктивных или подобных элементах. Например, они могут определять с помощью датчиков величины усилия, давления, ускорения, температуры, положения, расстояния и т.д., для последующей их соответствующей оценки.
После первоначального программирования промышленный робот обычно в состоянии осуществлять производственный процесс полуавтоматически или полностью автоматически, то есть абсолютно автономно. При этом осуществление производственного процесса может изменяться в определенных границах, например, в зависимости от информации от датчиков. Кроме того, блок управления промышленного робота может быть выполнен при необходимости самообучаемым.
Промышленный робот может осуществлять, в зависимости от вида оснащения его компонентов - механического и/или электрического, а также от вида управления этими компонентами с помощью блока управления промышленного робота, различные этапы монтажа в ходе процесса монтажа в шахте лифта или приспосабливаться к различным условиям во время такого этапа монтажа.
Предпочтительными в этой связи свойствами уже может обладать значительная часть уже разработанных промышленных роботов, нашедших применение в других областях техники, и требуется только адаптировать их при необходимости к особым условиям в процессе монтажа подъемных устройств в шахтах лифта. Например, для доставки промышленного робота внутри шахты лифта в нужное положение, он установлен на несущем компоненте, причем несущий компонент может перемещаться вместе с промышленным роботом, а при необходимости, вместе с другими монтажными компонентами в нужное положение внутри шахты лифта.
Альтернативно к форме выполнения в виде промышленного робота, мехатронный монтажный компонент может быть также выполнен другим способом. Кроме всего прочего, возможны специально сконструированные для указанного варианта применения при (частично) автоматизированной установке лифта мехатронные машины, в которых используют, например, специальные буры, винтоверты, подающие компоненты и т.д., например, для этого могли бы найти применение сверлильные инструменты с возможностью линейного перемещения, отверточные инструменты и подобный им модели.
Например, стены шахты лифта, на которых должны монтироваться конструктивные элементы, часто состоят из бетона, в частности, из железобетона. При сверлении отверстий в бетоне могут возникать очень сильные вибрации и большие усилия. Как сверлильный инструмент, так и монтажный компонент должны быть соответственно сконструированы, чтобы их выдерживать.
Для этого может, например, потребоваться соответствующая защита используемого в качестве монтажного компонента промышленного робота от повреждений сильными вибрациями и/или действующими вследствие этого большими усилиями.
Согласно одной форме исполнения изобретения, например, может быть предпочтительно предусмотрен в монтажном компоненте один или несколько амортизирующих элементов для смягчения или поглощения вибрации. Также возможно, что один или несколько амортизирующих элементов расположены в другом месте в комбинации из монтажного инструмента и монтажного компонента. Амортизирующий элемент можно интегрировать, например, в монтажном инструменте или он расположен в соединительном элементе между монтажным компонентом и монтажным инструментом. В этом случае монтажный инструмент и соединительный элемент могут рассматриваться, как часть монтажного компонента. Амортизирующий элемент выполнен, например, в виде одного или нескольких параллельно расположенных резиновых амортизаторов, недорогих и имеющихся в большом выборе на рынке. Отдельный резиновый амортизатор может также рассматриваться как амортизирующий элемент. К тому же возможно, что амортизирующий элемент выполнен в виде телескопического амортизатора.
Компонент детектирования арматуры способен вследствие этого обнаруживать в большинстве случаев визуально не различимую, установленную глубоко внутри стены арматуру, например, стальной профиль. Информация о существовании такой арматуры может быть предпочтительной, например, когда в качестве этапа монтажа нужно сверлить отверстия в стене шахты лифта, так как в этом случае можно предотвращать просверливание арматуры, а вместе с этим, как повреждение арматуры, так и в некоторых случаях - повреждение сверлильного инструмента.
Компонент детектирования арматуры сконструирован, в частности, для передачи расстояния до арматуры. Существуют недорогие подобные устройства. В них используются, в частности, индуктивные способы, при которых с помощью катушек создается магнитное поле. При нахождении электропроводных деталей, например, арматуры, в магнитном поле, оно изменяется. Это изменение регистрируется и обрабатывается. Поскольку устройства могут регистрировать только изменения магнитного поля, они должны передвигаться во время процесса измерения и детектирования. Их нельзя, в частности, поставить на стену и непосредственно формировать и передавать изображение расположения арматуры. Для получения такого изображения, компонент детектирования арматуры, проводимый вдоль стены, может непрерывно регистрировать расстояние до арматуры, в частности, в направлении движения. Например, при многократном растровом перемещении можно получать очень точное изображение расположения арматуры в стене.
Согласно одной форме исполнения изобретения монтажное устройство может иметь, кроме того, позиционирующий компонент, сконструированный для определения, по меньшей мере, одного из положений и одной ориентации монтажного устройства внутри шахты лифта. Другими словами, монтажное устройство должно быть в состоянии определять с помощью своего позиционирующего компонента свое расположение или положение относительно актуальной местной позиции и/или ориентации внутри шахты лифта.
Другими словами, позиционирующий компонент может быть предусмотрен для установления точного положения монтажного устройства внутри шахты лифта с требуемой точностью, например, с точностью менее, чем 10 см, предпочтительно, менее, чем 1 сантиметр или менее 1 миллиметра. Ориентация монтажного устройства может устанавливаться также с высокой точностью, т.е., например, с точностью менее 10°, предпочтительно, менее 5° или 1°.
При необходимости, позиционирующий компонент может быть сконструирован для измерения шахты лифта из своего актуального положения. Благодаря этому, позиционирующий компонент может распознавать, например, где он находится в шахте лифта в настоящее время, величину, например, расстояний до стен, потолка и/или дна шахты лифта, и т.д. Кроме того, позиционирующий компонент может распознавать, например, удаление от заданного положения, в частности, основываясь на этой информации, монтажное устройство может перемещаться подходящим способом для достижения заданного положения.
Позиционирующий компонент может определять положение монтажного устройства различными способами. Например, определение положения возможно при использовании оптических принципов измерения. Например, лазерные дальномерные приборы могут измерять расстояния между позиционирующим компонентом и стенами шахты лифта. Также возможны и другие оптические способы измерения, такие, как стереоскопические способы измерения или базирующиеся на триангуляции способы измерения. Наряду с оптическими способами измерения возможны также самые разные другие способы определения положения, например, базирующиеся на радиолокационных отражениях или им подобные.
Согласно другой форме исполнения изобретения монтажный компонент сконструирован для осуществления нескольких различных этапов монтажа, по меньшей мере, полуавтоматически, предпочтительно, полностью автоматически. В частности, монтажный компонент может быть сконструирован для использования на различных этапах монтажа различных монтажных инструментов, таких, как, например, бур, винтоверт и/или захват.
Способность использования различных монтажных инструментов дает возможность мехатронным монтажным элементам одновременно или по очереди осуществлять во время процесса монтажа разнообразные этапы монтажа, например, для установки в конце конструктивного элемента внутри шахты лифта в соответствующую положение.
Монтажный компонент сконструирован, в частности, для захвата соответственно используемого при различных видах этапов монтажа монтажного инструмента перед осуществлением этапа монтажа. Благодаря этому, монтажный компонент может складывать монтажный инструмент, не требующийся для следующего этапа монтажа, и захватывать вместо него необходимый монтажный инструмент, в частности, заменять монтажные инструменты. Вследствие этого, монтажный компонент может быть всегда соединен только с необходимым именно в данный момент монтажным инструментом. Благодаря этому, монтажный компонент обходится небольшим конструктивным пространством и может выполнять этапы монтажа во многих местах. В частности, его можно использовать довольно универсально. Если бы монтажный компонент всегда был соединен со всеми необходимыми для различных этапов монтажа монтажными инструментами, то он очевидно требовал бы большего конструктивного пространства. Из – за этого соответствующие монтажные инструменты использовались бы в гораздо меньшем количестве мест.
Согласно следующей форме исполнения изобретения монтажное устройство имеет компонент инструментального магазина, сконструированный для хранения необходимых монтажных инструментов для различных этапов монтажа и предоставлению их монтажному компоненту. Благодаря ему, можно надежно сохранять не требующиеся монтажные инструменты и оберегать их от падения во время осуществления рабочих этапов и во время перемещения монтажного устройства в шахте лифта.
Согласно следующей форме исполнения изобретения монтажный компонент может быть сконструирован для, по меньшей мере, полуавтоматического завинчивания винтов в отверстия стены шахты лифта в качестве этапа монтажа.
В частности, монтажный компонент может быть сконструирован для завинчивания винтов по бетону в заготовленные отверстия в бетонной стене шахты лифта. С помощью таких винтов по бетону можно создавать, например, внутри шахты лифта сильно нагружаемые точки фиксации, в которых могут фиксироваться, например, конструктивные элементы. При этом винты по бетону могут завинчиваться непосредственно в бетон, в частности, без обязательного использования дюбелей, и обеспечивать вследствие этого быстрый и простой монтаж. Правда, для завинчивания винтов, в частности, винтов по бетону, могут потребоваться большие усилия или крутящие моменты, которые должен предоставлять монтажный компонент или один из монтажных инструментов, которыми он манипулирует.
Согласно другой форме исполнения изобретения монтажный компонент может быть сконструирован, по меньшей мере, для полуавтоматической установки конструктивных элементов на стене шахты лифта в качестве этапа монтажа. Конструктивными элементами могут быть в этой связи самые различные заготовки для шахты, например, поддерживающие профили, части направляющих рельсов, винты, болты, крепежные скобы или подобные элементы.
Согласно следующей форме исполнения изобретения монтажное устройство имеет, кроме того, магазинный компонент, сконструированный для хранения монтируемых конструктивных элементов и предоставления их монтажному компоненту.
Например, магазинный компонент может вмещать множество винтов, в частности, винтов по бетону, и предоставлять их при необходимости монтажному компоненту. Для этого магазинный компонент может либо активно подавать монтажному компоненту хранящиеся конструктивные элементы, либо пассивно предоставлять конструктивные элементы так, чтобы монтажный компонент мог активно извлекать эти конструктивные элементы, а затем, например, их монтировать.
Магазинный компонент может быть сконструирован при необходимости для хранения разнообразных конструктивных элементов и одновременного или последовательного их предоставления монтажному компоненту. Альтернативно в монтажном устройстве могут быть предусмотрены несколько различных магазинных компонентов.
Согласно следующей форме исполнения изобретения монтажное устройство может иметь, кроме того, перемещающий компонент, сконструированный для вертикального перемещения несущего компонента внутри шахты лифта.
Другими словами, само монтажное устройство может быть выполнено для соответствующего перемещения своего несущего компонента с помощью своего перемещающего компонента внутри шахты лифта. Перемещающий компонент во всех случаях имеет привод, с помощью которого несущий компонент может перемещаться внутри шахты лифта, т.е., например, он может перемещаться между различными этажами здания. Кроме того, перемещающий компонент имеет блок управления, с помощью которого можно управляемо приводить в движение привод для доставки несущего компонента в требуемое положение внутри шахты лифта.
В качестве альтернативы, если сам перемещающий компонент является частью монтажного устройства, то перемещающий компонент может выполняться также внешним. Например, в качестве перемещающего компонента может быть предусмотрен предварительно собранный в шахте лифта привод. При необходимости этот привод может служить в последующем для подъемного устройства приводным двигателем, с помощью которого будет перемещаться кабина лифта в полностью установленном положении, а во время предшествующего процесса монтажа использоваться для перемещения несущего компонента. В этом случае может быть предусмотрена возможность обмена данными между монтажным устройством и отдельно установленным перемещающим компонентом, так чтобы монтажное устройство могло давать команду перемещающему компоненту для перемещения несущего компонента внутри шахты лифта в нужное положение.
Аналогично к полностью смонтированному подъемному устройству, несущий компонент может быть соединен в этом случае с противовесом с помощью несущего средства с возможностью нагрузки на растяжение и с возможностью изгиба, например, с помощью троса, цепи или ремня, а привод может действовать между несущим компонентом и противовесом. Более того, для перемещения несущего компонента возможны такие же конфигурации привода, как и для перемещения кабины лифта.
Перемещающий компонент может иметь различные исполнения для возможности перемещения несущего компонента, включая фиксированный на нем монтажный компонент внутри шахты лифта.
Например, согласно одной форме исполнения изобретения, перемещающий компонент фиксирован либо на несущем компоненте монтажного устройства, либо в месте фиксации наверху внутри шахты лифта и имеет с возможностью нагрузки на растяжение и с возможностью изгиба несущее средство, например, трос, цепь или ремень, один из концов которого закреплен на перемещающем компоненте, а другой конец - соответственно на другом элементе, в частности, в месте фиксации наверху внутри шахты лифта или на несущем компоненте. Другими словами, перемещающий компонент может быть установлен на несущем компоненте монтажного устройства, а закрепленное на перемещающем компоненте несущее средство может быть фиксировано своим другим концом наверху в точке фиксации внутри шахты лифта. И наоборот, перемещающий компонент может быть зафиксирован наверху в точке фиксации в шахте лифта, а открытый конец его несущего средства может быть зафиксирован в этом случае на несущем компоненте монтажного устройства. Перемещающий компонент может тогда целенаправленно перемещать несущий компонент внутри шахты лифта посредством перемещения несущего средства.
Например, такой перемещающий компонент может предусматриваться в виде тросовой лебёдки, в которой может наматываться с возможностью изгиба трос, например, на ворот, приводимый в движение электромотором. Тросовая лебёдка может быть зафиксирована либо на несущем компоненте монтажного устройства, либо, альтернативно, например, наверху в шахте лифта, например, на потолке шахты лифта. Открытый конец троса может быть прикреплен в этом случае напротив, либо наверху в точке фиксации в шахте лифта, или внизу на несущем компоненте. Монтажное устройство может перемещаться тогда внутри шахты лифта при целенаправленном наматывании троса на ворот и сматывании его.
Альтернативно перемещающий компонент может быть установлен на несущем компоненте, а для этого сконструирован так, чтобы при движении двигающегося компонента прикладывать усилие к стене шахты лифта для перемещения несущего компонента внутри шахты лифта при движении двигающегося компонента вдоль стены.
Другими словами, перемещающий компонент может установлен непосредственно на несущем компоненте и активно передвигаться с помощью своего двигающегося компонента вдоль стены шахты лифта.
Например, перемещающий компонент может иметь для этого привод, перемещающий один или несколько двигающихся компонентов в виде колес или роликов, причем колеса или ролики прижимаются к стене шахты лифта, поэтому приводимые приводом во вращение колеса или ролики могут перекатываться по возможности без проскальзывания вдоль стены и при этом перемещать перемещающий компонент, включая установленный на нем несущий компонент внутри шахты лифта.
Альтернативно возможно, что двигающийся компонент перемещающего компонента передает усилия на стену шахты лифта другим способом. Например, зубчатые колеса могли бы служить в качестве двигающегося компонента и входить в зацепление с установленным на стене зубчатым рельсом для вертикального перемещения перемещающего компонента в шахте лифта.
Согласно другой форме исполнения изобретения несущий компонент имеет, кроме того фиксирующий компонент, сконструированный для фиксации несущего компонента и/или монтажного компонента внутри шахты лифта в направлении поперек к вертикали, в частности, например, в горизонтальном или боковом направлении.
Под фиксацией в боковом направлении понимают при этом, что несущий компонент, включая установленный на нем монтажный компонент, можно доставлять не только вертикально, например, с помощью перемещающего компонента, на позицию на желаемой высоте внутри шахты лифта, но и, что несущий компонент можно зафиксировать затем на ней с помощью фиксирующего компонента также и в горизонтальном направлении.
Под опорой на стене следует понимать в этой взаимосвязи, в частности, что фиксирующий компонент опирается непосредственно и без промежуточного включения предварительно собранных на стене конструктивных элементов, как, например, элементов кронштейна, в частности, может передавать усилия в стену. Для этого опора может осуществляться разными способами.
В специальном выполнении фиксирующий компонент сконструирован для фиксирования, по меньшей мере, одного несущего компонента и одного монтажного компонента внутри шахты лифта в направлении вдоль вертикали.
Кроме того, фиксирующий компонент может быть сконструирован, например, для того, чтобы опираться сбоку на стены шахты лифта или прижиматься так, что несущий компонент больше не может передвигаться в горизонтальном направлении относительно стен. Для этого фиксирующий компонент может располагать, например, соответствующими опорами, штоками, рычагами или подобными элементами. Опоры, штоки или рычаги могут быть выполнены, в частности, таким образом, что они способны перемещаться наружу в направлении стены шахты лифта и, благодаря этому, прижиматься к стенам. Для этого возможно, что на противоположных сторонах несущего компонента или монтажного компонента расположены опоры, штоки или рычаги, с возможностью перемещения их всех наружу.
Также возможно, что только на одной стороне расположены опоры, штоки или рычаги с возможностью перемещения наружу, а на находящейся напротив стороне - неподвижный опорный элемент. Опорный элемент имеет, в частности, вытянутую в длину в вертикальном направлении форму и продолжается, в частности, по меньшей мере, на всем вертикальном протяжении несущего компонента. Он имеет, например, основную форму, предпочтительно в виде балки. Монтажное устройство устанавливают, в частности, в шахту лифта так, что опорный элемент расположен на стороне с дверными проемами в стенах шахты лифта. Вытянутая форма опорного элемента обеспечивает также достаточную опору и тогда, когда монтажное устройство нужно фиксировать на участке дверного проема.
Опорный элемент может быть выполнен, в частности, таким образом, что его расстояние от несущего компонента можно регулировать вручную, в частности, различными ступенями. Расстояние регулируют только вручную и это происходит только перед установкой монтажного устройства в шахту лифта. Поэтому фиксирующее устройство должно быть подогнано к габаритным размерам шахты лифта.
При прижимании к стенам шахты лифта может происходить деформация несущего компонента. Это случается, в частности тогда, когда опора или прижим происходит на участке дверного проема. Деформация может изменить относительное положение выше описанного магазинного компонента к монтажному компоненту, что может приводить к проблемам при установке монтажным компонентом рабочих инструментов и монтируемых конструктивных элементов. Такие проблемы можно предотвращать, например, если несущий компонент выполнен настолько жестким, что он не деформируется при опоре или прижиме, или магазинные компоненты располагаются относительно монтажного компонента так, что их относительные положения относительно друг друга не изменяются даже при деформации несущего компонента.
Также возможно, что фиксирующее устройство располагает присосками, посредством которых может осуществляться уравновешивающее усилие относительно стены шахты лифта и, благодаря этому, фиксация несущего компонента относительно стен шахты лифта. Например, посредством насоса можно активно создавать разряжение в присосках для увеличения уравновешивающего усилия. Посредством присосок несущий компонент опирается на стены шахты лифта. Фиксация посредством присосок действует также в вертикальном направлении.
Также возможно, что несущий компонент временно фиксируют посредством фиксирующих средств, например, в виде винтов, болтов или гвоздей к одной или нескольким стенам шахты лифта и он опирается, вследствие этого, на стены. Эта опора действует также в вертикальном направлении. Такая временная фиксация прекращается, когда несущий компонент следует доставить в другое положение внутри шахты лифта.
Более того, несущий компонент может опираться на уже смонтированные в шахте лифта конструктивные элементы, например, поддерживающие профили и с помощью их фиксироваться. Для этого опора может осуществляться также таким образом, что она действует также в вертикальном направлении.
Кроме того, возможно, что при использовании рабочего инструмента во время этапа монтажа относительно стены шахты лифта фиксируют только соответствующий рабочий инструмент. Для этого раму, относительно которой направляется в движении рабочий инструмент, можно фиксировать, например, посредством присосок на стене шахты лифта. Альтернативно к этому указанную раму можно временно фиксировать также посредством фиксирующих средств, например, в виде винтов, болтов или гвоздей на одной из стен шахты лифта.
Фиксация несущего компонента посредством фиксирующего компонента в боковом направлении внутри шахты лифта, может предотвращать, например, движение несущего компонента в горизонтальном направлении внутри шахты лифта во время этапа монтажа, когда работает монтажный компонент и прикладывает, например, поперечные усилия к несущему компоненту. Другими словами, фиксирующий компонент может служить квази контропорой для установленного на несущем компоненте монтажного компонента, поэтому монтажный компонент может косвенно опираться посредством фиксирующего компонента сбоку на стены шахты лифта. Такая боковая опора может быть, например, необходима, в частности, во время процесса сверления для возможности восприятия возникающих при этом горизонтально действующих усилий и предотвращения или смягчения вибраций.
В специальном выполнении этой формы исполнения изобретения несущий компонент может быть выполнен из двух частей. В первой части установлен монтажный компонент. Во второй части установлен фиксирующий компонент. Несущий компонент может иметь в этом случае, кроме того, выравнивающий компонент, сконструированный для выравнивания первой части несущего компонента относительно второй части несущего компонента, например, при повороте вокруг пространственной оси.
При таком выполнении фиксирующий компонент может фиксировать вторую часть несущего компонента внутри шахты лифта, например, опираясь сбоку на стены шахты лифта. Особенно предпочтительно, если фиксирующий компонент сконструирован для опоры второй части несущего компонента на стену со стороны входа в шахту и на расположенную напротив нее стену. Выравнивающий компонент несущего компонента может выравнивать тогда другую, первую часть несущего компонента подходящим способом относительно фиксированной сбоку второй части несущего компонента, например, при повороте выравнивающим компонентом этой первой части, по меньшей мере, вокруг пространственной оси. Вследствие этого, вместе перемещается также и установленный в первой части монтажный компонент. Монтажный компонент может получать вследствие этого положение и/или ориентацию, в которой он может просто и целенаправленно осуществлять необходимый этап монтажа.
Кроме того, монтажное устройство может иметь сканирующий компонент, посредством которого можно измерять расстояние до объекта, например, до стены шахты лифта. Сканирующий компонент направляют, например, посредством монтажного компонента определенным движением вдоль стены шахты лифта и постоянно измеряют расстояние до стены. Это позволяет делать выводы об угловом положении стены и качестве стены в отношении неровностей, выступов или уже имеющихся отверстий. Полученные сведения могут, например, использоваться для согласования включения монтажного компонента, например, для изменения планируемого положения сверления.
Альтернативно или дополнительно сканирующий компонент может направляться на участке, в котором нужно монтировать элементы кронштейна, зигзагом вдоль стены и формировать продольный профиль стены по измеренным расстояниям. Этот продольный профиль можно использовать, как это описывается, для согласования управления монтажным компонентом.
Другой аспект изобретения относится к способу осуществления процесса монтажа в шахте лифта подъемного устройства. Способ содержит установку монтажного устройства в шахту лифта согласно данной в описании форме исполнения изобретения, управляемое перемещение монтажного устройства внутри шахты лифта и, наконец, по меньшей мере, полуавтоматическое, предпочтительно полностью автоматическое, осуществление этапа монтажа в ходе процесса монтажа с помощью монтажного устройства в виде, по меньшей мере, полуавтоматического управляемого сверления отверстий в стене шахты лифта.
Другими словами, описанное ранее монтажное устройство может использоваться для частично или полностью автоматического, а вследствие этого, частично или полностью автономного осуществления этапов монтажа процесса монтажа в шахте лифта.
Согласно изобретению, для обнаружения арматуры внутри стены шахты лифта, компонент детектирования арматуры проводят с помощью монтажного компонента вдоль стены шахты лифта.
Согласно одной форме осуществления способа контролируют износ вставленного в бур вставного элемента сверла. В частности, при достижении границы износа передается соответствующее сообщение или прекращается осуществление сверления. В этом отношении под буром понимают, в частности, сверлильную машину, в которую вставлен вставной элемент сверла, приводимый в движение сверлильной машиной. Используемые вставные элементы сверла подвергаются износу и могут повреждаться, например, также при попадании на арматуру. Контролирование износа обеспечивает получение нужного результата осуществленных сверлений и возможность надлежащего выполнения нужного монтажа.
В частности, он предотвращает трудоемкие, а вместе с этим – дорогие дополнительные работы в виде сверления вручную.
Для контролирования износа вставного элемента сверла и для распознавания изношенного или испорченного вставного элемента сверла особенно следят, в частности, за его подачей при сверлении и/или за промежутком времени для выполнения сверления на нужную глубину. При величине подачи ниже пограничной величины и/или при превышении пограничной величины промежутка времени, насаженный вставной элемент сверла признают неисправным и передается соответствующее сообщение.
Из полученной подачи и/или промежутка времени для выполнения сверления с требуемой глубиной можно определять степень износа и, например, регулировать подачу в зависимости от степени износа. Например, для увеличивающейся степени износа можно устанавливать меньшую подачу.
Компонент детектирования арматуры сконструирован, в частности, для передачи расстояния до арматуры. Из известного положения компонента детектирования арматуры и переданного компонентом детектирования арматуры расстояния до арматуры можно формировать изображение расположения арматуры в стене. Компонент детектирования арматуры перемещают с помощью монтажного компонента вдоль стены шахты лифта несколько раз, в частности, в виде растра. На основе выданных компонентом детектирования арматуры расстояний до арматуры и положений компонента детектирования арматуры в результате получают очень точное изображение расположения арматуры в стене.
При известном расположении арматуры можно определять возможные положения сверления. Их определяют так, что сверления выполняются без достаточного расстояния от бура до арматуры. При монтаже подъемного устройства некоторые элементы, например, элементы кронштейна нужно крепить к стене шахты лифта двумя винтами или болтами. Конструктивные элементы имеют для этого отверстия, через которые проводят болты. Компоновка или положение отверстий относительно друг – друга определяет вследствие этого также и расположение положений сверления отверстий для винтов или болтов. Следовательно, в этом случае необходимо установление первого и взаимосвязанного с ним второго положения сверления, расположенных в заданном порядке друг к другу.
Согласно одной форме осуществления способа устанавливают первый возможный участок для первого положения сверления и второй возможный участок для второго положения сверления. Затем на основе заданного расположения друг к другу положений сверления и обоих возможных участков для положений сверления определяют первое и второе положение сверления. В частности, устанавливают участок нахлеста между обоими указанными участками и устанавливают внутри этого участка нахлеста оба положения сверления.
Согласно другой форме осуществления способа сначала определяют несколько возможных положений для первого положения сверления, а затем проверяют возможно ли второе положение сверления относительно одного из возможных положений, взаимосвязанного с первым положением сверления. Как только будет найдено второе положение сверления, взаимосвязанное с возможным первым положением сверления, выбирают, в частности, эти оба положения сверления. Также возможно, что устанавливают несколько возможных пар из первых и вторых положений сверления, а затем выбирают одну из этих положений сверления.
Для поиска возможных положений сверления участок, в котором предусмотрено сверление, делят, например, на квадратные ячейки. Для поиска возможных первых положений сверления проверяют, возможно ли сверление в желаемом положении. Затем, исходя из желаемого положения, проверяют по спирали квадратные ячейки до тех пор, пока не будет найдено заданное количество возможнее первых положений сверления, например, четыре или шесть. Для каждого первого положения сверления существует, как описано выше, второе взаимосвязанное с ним положение сверления. Для определения второго положения сверления взаимосвязанное с возможным первым положениям сверления, проверяют вторые положения сверления. Для этого могут проверяться только те положения сверления, которые сообщаются с возможным первым положением сверления или это также может осуществлять по спирали.
Следует обратить внимание на то, что некоторые возможные признаки и преимущества изобретения описаны в данной публикации со ссылкой на разные формы исполнения изобретения. В частности, частично признаки описаны, со ссылкой на согласно изобретению монтажное устройство и частично - со ссылкой на согласно изобретению способ осуществления процесса монтажа в шахте лифта. Специалисту понятно, что признаки можно комбинировать соответствующим способом, или заменять их для получения других форм исполнения изобретения. В частности, специалист понимает, что признаки устройства, описанные, со ссылкой на монтажное устройство, можно подгонять аналогичным способом для описания формы исполнения согласно изобретению способа, и наоборот.
Далее приводится описание формы исполнения изобретения со ссылкой на приложенные чертежи, причем ни чертежи, ни описание не следует толковать как ограничивающие объем изобретения. На чертежах показаны:
фиг. 1. Перспективный вид шахты лифта подъемного устройства с установленным в ней монтажным устройством согласно форме исполнения данного изобретения;
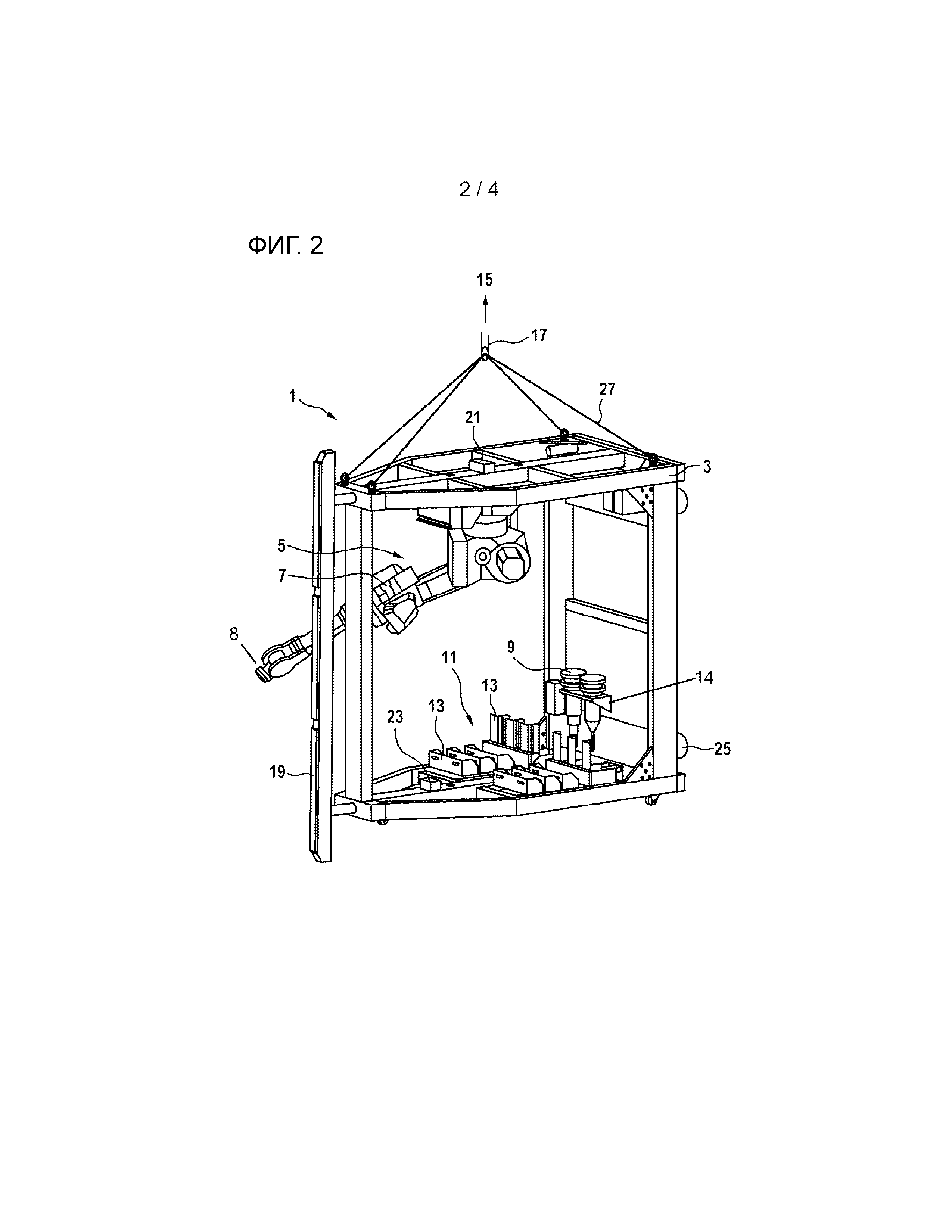
фиг. 2. Перспективный вид монтажного устройства согласно форме исполнения данного изобретения;
фиг. 3. Вид сверху в шахту лифта подъемного устройства с установленным в ней монтажным устройством согласно альтернативной форме исполнения данного изобретения;
фиг.4. Вид сбоку в шахту лифта подъемного устройства с установленным в ней монтажным устройством и его линиями передачи энергии и связи;
фиг. 5. Часть выполненного в виде промышленного робота монтажного компонента с амортизирующим элементом и с соединенным с ним монтажным инструментом в виде бура;
фиг. 6. Часть выполненного в виде промышленного робота монтажного компонента с амортизирующим элементом в соединительном элементе с монтажным инструментом в виде бура;
фиг. 7a и 7b. Арматура в стене шахты лифта на двух участках, в которых должны сверлиться взаимосвязанные друг с другом отверстия, и иллюстрация поиска возможных положений сверления;
фиг. 8a и 8b. Показаны арматура в стене шахты лифта на двух участках, в которых должны сверлиться взаимосвязанные друг с другом отверстия и иллюстрация альтернативного поиска возможных положений сверления.
Фигуры показаны только схематически и не соответствуют масштабу. Одинаковые ссылочные позиции обозначают на различных фигурах одинаковые или равнодействующие признаки.
На фиг. 1 показана шахта 103 лифта подъемного устройства 101, в которой расположено монтажное устройство 1 согласно форме исполнения изобретения данного изобретения. Монтажное устройство 1 имеет несущий компонент 3 и мехатронный монтажный компонент 5. Несущий компонент 3 выполнен в виде рамы, на которой смонтирован мехатронный монтажный компонент 5. Эта рама имеет габаритные размеры, обеспечивающие вертикальное перемещение несущего компонента 3 внутри шахты 103 лифта, то есть, вдоль вертикали 104, в частности, например, в разные вертикальные положения на различных этажах внутри здания. Мехатронный монтажный компонент 5 выполнен в изображенном примере исполнения в виде промышленного робота 7, установленного свисающим вниз на раме несущего компонента 3. При этом рука промышленного робота 7 может передвигаться относительно несущего компонента 3 и перемещаться, например, к стене 105 шахты 3 лифта.
Несущий компонент 3 соединен посредством служащего в качестве несущего средства 17 стального троса с перемещающим компонентом 15 в виде приводимого в движение приводом тросовой лебёдки, установленной в шахте 103 лифта в месте 107 фиксации на потолке шахты 103 лифта. С помощью перемещающего компонента 15 монтажное устройство 1 можно перемещать внутри шахты 103 лифта, вертикально по всей длине шахты 103 лифта.
Кроме того, монтажное устройство 1 имеет фиксирующий компонент 19, с помощью которого несущий компонент 3 можно фиксировать внутри шахты лифта 103 в боковом направлении, в частности, в горизонтальном направлении. Фиксирующий компонент 19 на фронтальной стороне несущего компонента 3 и/или шток (не изображен) на тыльной стороне несущего компонента 3 могут перемещаться для этого наружу, вперед или назад и зажимать несущий компонент 3 между стенами 105 шахты 103 лифта. Фиксирующий компонент 19 и/или штоки могут раздвигаться для этого, например, с помощью гидравлики или похожих систем наружу для фиксации несущего компонента 3 в шахте 103 лифта в горизонтальном направлении. Альтернативно было бы возможным фиксировать только лишь части монтажного компонента 5 в горизонтальном направлении, например, в то время как сверлильная машина опирается соответствующим образом в стены шахты 103 лифта.
На фиг. 2 показан увеличенный вид монтажного устройства 1 согласно форме исполнения данного изобретения.
Несущий компонент 3 выполнен в виде клетчатой рамы, в которой множество проходящих горизонтально и вертикально поперечин образуют механически нагружаемую структуру. Размер поперечин и возможно предусмотренных распорок рассчитан для этого так, что несущий компонент 3 может выдерживать усилия, возникающие во время различных этапов монтажа, осуществляемых монтажным компонентом 5 в ходе процесса монтажа в шахте 103 лифта.
Наверху, к клетчатому несущему компоненту 3, прикреплены стопорные тросы 27, с возможностью их соединения с несущим средством 17. При перемещении несущего компонента 17 внутри шахты 103 лифта, в частности, например, при наматывании или сматывании с возможностью изгиба несущего средства 17 на тросовую лебёдку перемещающего компонента 15, можно вследствие этого вертикально перемещать подвешенный несущий компонент внутри шахты 103 лифта.
В одном альтернативном выполнении (не изображено) монтажного устройства 1 перемещающий компонент 15 может быть предусмотрен также непосредственно на несущем компоненте 3 и подтягивать вверх или опускать, например, посредством тросовой лебёдки несущий компонент 3 с помощью неподвижно фиксированного наверху в шахте 3 лифта несущего средства 17.
В другом возможном выполнении изобретения (не изображено) перемещающий компонент 15 может быть также непосредственно неподвижно фиксирован на несущем компоненте 3 и приводить в движение ролики, например, плотно прижимаемые к стенам 105 шахты 103 лифта. В таком выполнении монтажное устройство 1 может самостоятельно перемещаться вертикально внутри шахты 103 лифта, без необходимости предварительного осуществления установки внутри шахты 103 лифта, в частности, не предусматривая, например, несущее средство 17 внутри шахты 103 лифта.
Кроме того, на несущем компоненте 3 могут быть предусмотрены направляющие элементы, например, в виде опорных роликов 25, с помощью которых несущий компонент 3 во время вертикального перемещения внутри шахты 103 лифта может направляться вдоль одной или нескольких стен 105 шахты 103 лифта.
Сбоку на несущем компоненте 3 предусмотрен фиксирующий компонент 19. В изображенном примере выполнения фиксирующий компонент 19 выполнен с проходящей в вертикальном направлении продолговатой поперечиной, с возможностью ее перемещения в горизонтальном направлении относительно рамы несущего компонента 3. Для этого поперечину устанавливают на несущем компоненте 3, например, через гидравлический цилиндр с возможностью его блокировки или самоблокирующийся мотор - шпиндель. При перемещении поперечины фиксирующего компонента 19 в сторону от рамы несущего компонента 3, она передвигается в сторону к одной из стен 105 шахты 103 лифта. Альтернативно или в дополнение к этому штоки на тыльной стороне несущего компонента 3 могут перемещаться назад для установки в распор несущего компонента 3 в шахте 103 лифта. Вследствие этого несущий компонент 3 может прижиматься внутри шахты лифта 103 и фиксировать несущий компонент 3 внутри шахты лифта 103 в боковом направлении, например, во время осуществления этапа монтажа. Усилия, подаваемые на несущий компонент 3, могут передаваться в этом положении на стены 105 шахты 103 лифта, предпочтительно без возможности перемещения несущего компонента 3 при этом внутри шахты 103 лифта или его вибрации.
В специальном выполнении (не изображенным в деталях) несущий компонент 3 может быть выполнен из двух частей. При этом в первой части установлен монтажный компонент 5, а во второй части - фиксирующий компонент 19. В таком выполнении в несущем компоненте 3 может быть предусмотрен, кроме того, выравнивающий компонент, обеспечивающий управляемое выравнивание несущей монтажный компонент 5 первой части несущего компонента 3 относительно второй части несущего компонента 3 с возможностью фиксирования внутри шахты 103 лифта. Например, выравнивающее устройство может передвигать первую часть, по меньшей мере, вокруг пространственной оси относительно второй части.
В изображенной форме исполнения изобретения мехатронный монтажный компонент 5 выполнен с помощью промышленного робота 7. Следует обратить внимание на то, что мехатронный монтажный компонент 5 можно реализовать, тем не менее, также и другим способом, например, с выполненными иначе приводными устройствами, манипуляторами, исполнительными элементами и т.д. В частности, монтажный компонент может иметь специально адаптированную для использования в процессе монтажа внутри шахты 103 лифта подъемного устройства 1 мехатронику или робототехнику.
В изображенном примере промышленный робот 7 оснащен несколькими с возможностью поворота вокруг поворотных осей руками робота. Например, промышленный робот может иметь, по меньшей мере, шесть степеней свободы, то есть, направляемый промышленным роботом 7 монтажный инструмент 9 может передвигаться с шестью степенями свободы, в частности, например, с тремя степенями свободы поворота и тремя степенями свободы перемещения. Например, промышленный робот может быть выполнен в виде робота с вертикально сгибающейся рукой, робота с горизонтально сгибающейся рукой или робота с кинематической схемой типа SCARA или картезианского робота, или портального робота.
Робот может соединяться на своем свободнонесущем конце 8 с различными монтажными инструментами 9. Монтажные инструменты 9 могут отличаться относительно своей конструкции и своей цели использования. Монтажные инструменты 9 могут фиксироваться на несущем компоненте 3 в компоненте 14 инструментального магазина так, что свободнонесущий конец промышленного робота 7 может подходить к ним и соединяться с одним из них. Промышленный робот 7 может располагать для этого, например, системой смены инструментов, выполненной для обеспечения, по меньшей мере, манипулирования несколькими такими монтажными инструментами 9.
Один из монтажных инструментов 9 может иметь вид сверлильного инструмента, похожего на сверлильную машину. При соединении промышленного робота 7 с таким сверлильным инструментом монтажный компонент 5 может быть подготовлен для обеспечения, по меньшей мере, частично автоматического сверления отверстий, например, в одной из стен 105 шахты 103 лифта. Сверлильный инструмент передвигаться в ней промышленным роботом 7, и он может манипулировать инструментом, например, так, что сверлильный инструмент просверливает с помощью бура в предусмотренном положении отверстия, например, в бетоне стены 105 шахты 103 лифта, в которую затем можно, например, завинчивать крепежные болты для фиксации элементов крепления. Сверлильный инструмент также, как промышленный робот 7 может соответственно выполнен для этого так, что он может выдерживать, например, возникающие при сверлении в бетоне значительные усилия и вибрации.
Другой монтажный инструмент 9 может быть выполнен в виде завинчивающего устройства, по меньшей мере, для полуавтоматического завинчивания винтов в ранее высверленные отверстия в стене 105 шахты 103 лифта. При этом завинчивающее устройство может быть выполнено, в частности, также для завинчивания с его помощью винтов по бетону в бетоне стены 105 шахты.
Кроме того, в несущем компоненте 3 может быть предусмотрен магазинный компонент 11. Магазинный компонент 11 может служить для хранения монтируемых конструктивных элементов 13 и предоставления их монтажному компоненту 5. В изображенном примере выполнения магазинный компонент 11 расположен в нижнем участке рамы несущего компонента 3 и вмещает различные конструктивные элементы 13, например, в виде разных поперечных сечений, которые нужно монтировать внутри шахты 103 лифта в стенах 105 для фиксации на них, например, направляющих рельсов для подъемного устройства 101. В магазинном компоненте 11 могут также храниться и предоставляться винты, которые могут завинчиваться с помощью монтажного компонента 5 в заготовленные отверстия в стене 105.
В изображенном примере выполнения изобретения промышленный робот 7 может захватывать, например, автоматически крепежный болт из магазинного компонента 11 и не полностью завинчивать его, например, с помощью выполненного в виде завинчивающего устройства монтажного инструмента 9 в ранее высверленные монтажные отверстия в стене 105. Затем монтажный инструмент 9 заменяется в промышленном роботе 7 и, например, из магазинного компонента 11 захватывается монтируемый конструктивный элемент 13. Конструктивный элемент 13 может иметь прорезь для крепления. Когда конструктивный элемент 13 доставляется с помощью монтажного компонента 5 в предусмотренное положение, то частично завинченные ранее крепежные болты могут входить в зацепление в эту прорезь для крепления или проходить через нее насквозь. В последующем может снова происходить переконфигурация на выполненный в виде завинчивающего устройства монтажный инструмент 9 и крепежные болты затягивают до отказа.
В изображенном примере становится очевидным, что с помощью монтажного устройства 1 процесс монтажа, в котором монтируют конструктивные элементы 13 на стене 105, можно осуществлять полностью или, по меньшей мере, частично автоматически, в то время, как монтажный компонент 5 сначала сверлит отверстия в стене 105, а затем фиксирует в этих отверстиях конструктивные элементы 13 с помощью крепежных болтов.
Такой автоматизированный процесс монтажа можно осуществлять относительно быстро и это помогает, в частности, при неоднократно повторно осуществляемых внутри шахты лифта монтажных работах, экономить значительные издержки по установке, а вместе с ними - время и затраты. Так как монтажное устройство может осуществлять процесс монтажа в значительной степени автоматически, можно предотвращать или уменьшать, по меньшей мере, в некоторой степени взаимодействие с людьми, из числа специалистов по монтажу, поэтому можно также заметно снизить для специалистов по монтажу, обычно возникающие, кроме всего прочего в ходе таких процессов монтажа риски, в частности, риски несчастных случаев.
Для точного позиционирования монтажного устройства 1 внутри шахты 103 лифта, может быть предусмотрен, кроме того, позиционирующий компонент 21. Позиционирующий компонент 21 может быть стационарно установленным, например, на несущем компоненте 3 и передвигаться вместе с ним вследствие этого при перемещении монтажного устройства 1 внутри шахты 3 лифта. Альтернативно позиционирующий компонент 21 может располагаться также независимо от монтажного устройства 1 в другом положении внутри шахты 103 лифта и определять оттуда актуальное положение монтажного устройства 1.
Позиционирующий компонент 21 может использовать разные принципы измерения для точного определения актуального положения монтажного устройства 1. В частности, особенно подходят оптические методы измерения для возможности обеспечения требуемой точности при определении положения, например, менее, чем 1 сантиметра, предпочтительно, менее 1 миллиметра внутри шахты 103 лифта. Блок управления монтажного устройства 1 может оценивать сигналы от позиционирующего компонента 21 и определять фактическое положение относительно заданного положения внутри шахты 103 лифта посредством этих сигналов. Затем, базируясь на них, блок управления может перемещать, сначала, например, несущий компонент 3 внутри шахты 103 лифта на нужную высоту или перевозить его. В последующем блок управления может, учитывая затем определенное действительное положение, соответственно управлять монтажным компонентом 5 для сверления внутри шахты 3 лифта отверстий, например, в нужных местах, завинчивания винтов и/или монтирования, в конце конструктивных элементов 13.
Кроме того, монтажное устройство 1 имеет компонент 23 детектирования арматуры. В изображенном примере выполнения компонент 23 детектирования арматуры установлен как один из монтажных инструментов 9 в магазинном компоненте 11, и промышленный робот 7 может им манипулировать. Компонент 23 детектирования арматуры может доставляться, вследствие этого, промышленным роботом 7 в нужное положение, в котором, например, в последующем сверлится отверстие в стене 105. Тем не менее, альтернативно компонент 23 детектирования арматуры может быть предусмотрено также по – другому в монтажном устройстве 1.
Компонент 23 детектирования арматуры сконструирован для обнаружения арматуры внутри стены 105 шахты 103 лифта. Для этого компонент детектирования арматуры может использовать, например, физические способы измерения, в которых используются электрические и/или электромагнитные свойства обычной металлической арматуры внутри бетонной стены для определения точного положения этой арматуры.
При обнаружении арматуры внутри стены 105 с помощью компонента 23 детектирования арматуры, блок управления монтажного устройства 1 может корректировать, например, ранее принятые положения просверливаемых болтовых отверстий так, чтобы это не приводило к пересечению болтовых отверстий и арматуры.
Резюмируя, описывается монтажное устройство 1, с помощью которого можно осуществлять, например, с поддержкой робота процесс монтажа частично или полностью автоматически внутри шахты 103 лифта. При этом монтажное устройство 1 может, по меньшей мере, оказывать помощь специалистам по монтажу при установке компонентов подъемного устройства 101 внутри шахты 103 лифта, в частности, проводить, например, подготовительные работы. В частности, неоднократно возникающие, то есть повторяющиеся рабочие этапы могут осуществляться автоматически, а вследствие этого - быстро, точно, с низким риском и/или экономично. Осуществляемые в способе монтажа этапы процесса монтажа могут отличаться в отношении осуществления отдельных выполняемых рабочих этапов, последовательности рабочих этапов и/или необходимого взаимодействия между машиной и человеком. Например, хотя монтажное устройство 1 может осуществлять, в частности, части процесса монтажа автоматически, тем не менее, специалисты по монтажу могут взаимодействовать с монтажным устройством 1 в том отношении, что монтажные инструменты 9 могут заменяться вручную и/или вручную могут пополняться конструктивные элементы, например, в магазинном компоненте. Также возможны и промежуточные между работами этапы, осуществляемые специалистами по монтажу. Объем функций предусмотренного в монтажном устройстве 1 мехатронного монтажного компонента 5 может содержать все или часть перечисленных далее рабочих этапов:
- измеряют шахту 103 лифта. Для этого, например, детектируют дверные проемы 106, определяют точную ориентацию шахты 103 лифта 103 и/или оптимизируют расположение шахты. При необходимости полученные в процессе измерения реальные данные контрольных замеров шахты 103 лифта сравнивают с запланированными данными, указанными, например, в модели автоматизированного проектирования шахты 103 лифта;
- определяют ориентацию и/или локализацию монтажного устройства 1 внутри шахты 103 лифта;
- детектируют стержни арматуры или арматуру в стенах 105 шахты 103 лифта;
- затем проводят такие подготовительные работы, как сверления, фрезерные операции, работы резания и т.д., причем эти подготовительные работы осуществляют монтажным компонентом 5 монтажного устройства 1, предпочтительно, полуавтоматически или полностью автоматически;
- затем устанавливают конструктивные элементы 13, например, элементы крепления, элементы интерфейса и/или элементы кронштейна. Например, завинчивают винты по бетону в ранее высверленные отверстия, вбивают болты, сваривают друг с другом детали, забивают гвоздями и/или склеивают и т.д.;
- манипулируют конструктивными элементами и/или заготовками для шахты, например, кронштейнами, рельсами, элементами двери шахты лифта, винтами и подобными элементами с помощью монтажного устройства 1 или полностью автоматически. Необходимый материал и/или конструктивные элементы пополняют в монтажном устройстве 1 автоматически и/или с помощью персонала.
Посредством этих и, возможно, других рабочих этапов можно согласовывать друг с другом в процессе монтажа внутри шахты 103 лифта рабочие этапы и последовательность работ и, например, минимизировать взаимодействие человека и машины, в частности, можно создать более автономно работающую систему. Альтернативно можно использовать менее сложную, а вместе с тем, более надежную систему монтажного устройства, причем в этом случае автоматизация утверждает себя только в незначительной степени, а вследствие этого обычно становится необходимым большее взаимодействие между человеком и машиной.
Перемещающий компонент для перемещения монтажного устройства в шахте лифта может располагаться также на несущем компоненте монтажного устройства и воздействовать на стены шахты лифта. Вид сверху такого монтажного устройства 1 в шахте 103 лифта изображен на фиг. 3. Перемещающий компонент 115 имеет два электромотора 151, расположенные на несущем компоненте 3 монтажного устройства 1. В расположенных напротив сторонах несущего компонента 3 фиксированы с возможностью поворота оси 153 посредством двух направляющих 152. На осях 153 соответственно фиксированы два колеса 154 без возможности поворота относительно осей 153. Колеса 154 могут перекатываться по стенам 105 шахты 103 лифта и прижиматься посредством не показанных на чертеже прижимных устройств к соответствующей стене 105. Электромоторы 151 соединены посредством приводного соединения 155, например, в виде зубчатых колес и цепи с осями 153 и могут приводить в движение, вследствие этого колеса 154 и перемещать несущий компонент 3 внутри шахты 103 лифта.
На несущем компоненте 3, на фиг. 3 расположен, кроме того, на стороне, на которой не находится перемещающий компонент 115, фиксирующий элемент, состоящий из опорного элемента 119 и телескопического цилиндра 120. Опорный элемент 119 расположен так, что он находится на одной стороне с не изображенными на фиг. 3 дверными проемами 106 в стенах 105 шахты 103 лифта (аналогично фиг.1).
В частности, монтажное устройство 1 устанавливают в шахту лифта 103 так, что
опорный элемент 119 расположен соответствующим образом. Вытянутый опорный элемент 119 имеет предпочтительно квадратную или в виде балки основную форму и направлен в вертикальном направлении. Аналогично к изображению по фиг. 1 и фиг. 2, он продолжается на всем вертикальном протяжении несущего компонента 3, а кроме того, выступает в обоих направлениях от несущего компонента. Опорный элемент 119 соединен посредством двух, выполненных в виде цилиндров соединительных элементов 123 с несущим компонентом 3. Соединительные элементы 123 состоят из двух не изображенных по отдельности деталей, с возможностью ручного задвигания друг в друга и растягивания, причем они могут фиксироваться в нескольких положениях. Это позволяет регулировать расстояние 122 между опорным элементом 119 и несущим компонентом 3.
На противоположной опорному элементу 119 стороне несущего компонента 3 расположен телескопический цилиндр 120. Телескопический цилиндр 120 имеет выпускной шток 121, соединенный с U-образным удлинительным элементом 124. Шток 121 может настолько выдвигаться в направлении стены 105 шахты 103 лифта, что опорный элемент 119 и соединенный со штоком 121 соединенный удлинительный элемент 124 прилегают к стенам 105 шахты 103 лифта, а несущий компонент 3 прижат ими к стенам 105. В частности, несущий компонент 3 фиксирован вследствие этого в вертикальном и в горизонтальном направлениях, то есть, поперек к вертикальному направлению. В изображенном примере выполнения телескопический цилиндр 120 может выдвигаться и задвигаться с помощью электромотора. Однако, возможны и другие типы приводов, например, пневматические или гидравлические.
Изображенный на фиг. 3 телескопический цилиндр 120 расположен на верхней стороне или на участке верхней стороны несущего компонента 3. Аналогично этому несущий компонент 3 также располагает на нижней стороне или на участке своей нижней стороны телескопическим цилиндром.
Также возможно, что соответственно два телескопических цилиндра или более, чем два, например, три или четыре телескопических цилиндра расположены на одной высоте. При этом шток телескопических цилиндров может прилегать к стене шахты лифта, например, без промежуточного включения удлинительного элемента.
Состоящий из опорного элемента и телескопических цилиндров фиксирующий элемент также возможен в комбинации с монтажным устройством, перемещающимся посредством несущего средства, как это изображено на фиг. 1 и фиг. 2 внутри шахты лифта.
Монтажное устройство нужно снабжать в шахте лифта энергией и необходим обмен данными с ним. На фиг. 4 изображены линии передачи энергии и связи с монтажным устройством 1 в шахте 103 лифта. Монтажное устройство 1 располагает несущим компонентом 3 и мехатронным монтажным компонентом 5 в виде промышленного робота 7. Промышленный робот 7 управляется блоком управления, состоящим из расположенного в несущем компоненте 3 исполнительного элемента 156 и расположенного на этаже вне шахты 103 лифта компьютерного блока 157 управления. Компьютерный блок 157 управления и исполнительный элемент 156 соединены друг с другом посредством линии 158 передачи данных, например, в виде линии передачи данных типа "Эзернет". Линия 158 передачи данных является частью так называемого подвесного кабеля 159, содержащего также силовые провода 160, посредством которых монтажное устройство 1 снабжается электрической энергией от источника 161 напряжения. Для лучшей наглядности провода внутри монтажного устройства 1 не изображены.
В частности, исполнительный элемент 156 промышленного робота 7 снабжается посредством силовых проводов 160 электрической энергией и находится в коммуникационной связи посредством линии 158 передачи данных с компьютерным блоком 157 управления для передачи данных. Компьютерный блок 157 управления посылает, в частности, по линии 158 передачи данных командные сигналы исполнительному элементу 156, преобразующему их затем в конкретные включения отдельных, не показанных на чертеже, электромоторов промышленного робота 7 и передвигает, например, промышленный робот 7, как это задано компьютерным блоком 157 управления.
На фиг. 5 изображена часть, выполненного в виде промышленного робота 7 монтажного компонента 5 с амортизирующим элементом 130 и с присоединенным к нему монтажным инструментом в виде бура 131. В бур 131 вставлен вставной элемент 132 сверла, с возможностью его приведения в движение буром 131. Амортизирующий элемент 130 состоит из нескольких, параллельно расположенных резиновых амортизаторов 136, которые могут соответственно рассматриваться, как амортизирующий элемент. Амортизирующий элемент 130 вставлен в руку 133 промышленного робота 7 и разделяет его на первую, со стороны бура часть 134 и вторую часть 135. Амортизирующий элемент 130 соединяет обе части 134, 135 руки 133 промышленного робота 7 и передает через вставной элемент 132 сверла амортизированные удары и вибрацию во вторую часть 135.
Согласно фиг. 6 амортизирующий элемент 130 может быть расположен также в соединительном элементе 137 между промышленным роботом 7 и монтажным инструментом в виде бура 131. Амортизирующий элемент сконструирован, по существу, идентично амортизирующему элементу 130 по фиг. 5. Соединительный элемент 137 соединен неподвижно с буром 131, поэтому промышленный робот 7 принимает комбинацию из соединительного элемента 137 и бура 131 для сверления отверстия в стене шахты лифта.
Также возможно, что амортизирующий элемент выполнен в виде интегральной составной части бура.
Для контроля износа вставного элемента 132 сверла бура 131, контролируют подачу сверла при сверлении и/или промежуток времени для выполнения сверления с желаемой глубиной. При подаче ниже пограничной величины и/или при превышении пограничной величины промежутка времени, насаженный вставной элемент сверла признается неисправным и передается соответствующее сообщение.
Посредством фиг. 7a и фиг. 7b описываются способ формирования изображения расположения арматуры внутри стены шахты лифта и способ определения первого и связанного с ним второго положения сверления.
На фиг. 7a изображен участок 140 стены шахты лифта, в котором должно осуществляться сверление в первом положении сверления. Для лучшего описания способа участок 140 разделен на квадратные ячейки, обозначенные направо со следующими друг за другом буквами от A до J и вниз - с увеличивающимися числами от 1 до 10. Это разделение аналогично проведено на фиг. 7b.
На изображенном на фиг. 7a участке 140 первая и вторая арматура 141, 142 проходят сверху вниз, причем они проходят, по меньшей мере, на участке 140 прямо и параллельно друг к другу. Первая арматура 141 проходит при этом от B1 к B10, а вторая арматура 142 от II до I10. Дополнительно третья и четвертая арматура 143, 144 проходят слева направо, причем они проходят, по меньшей мере, на изображенном участке прямо и параллельно друг к другу. При этом третья арматура 143 проходит от A4 до J4, а четвертая арматура 144 - от A10 до J10.
Для формирования изображения расположения арматуры 141, 142, 143, 144 компонент 23 детектирования арматуры направляют много раз монтажным компонентом 5 вдоль стены 105 шахты лифта. Для этого компонент 23 детектирования арматуры сначала направляют несколько раз сверху вниз (и наоборот), а затем - слева направо (и наоборот). Компонент 23 детектирования арматуры постоянно выдает во время движения расстояние 145 до самой ближней в направлении движения арматуры 143, поэтому из известного положения компонента 23 детектирования арматуры и указанного расстояния 145 можно формировать изображение расположения арматуры 141, 142, 143, 144.
Как только расположение арматуры 141, 142, 143, 144 станет известно, можно определить первый возможный участок 146 для первого положения сверления. На фиг. 7a этот первый возможный участок 146 является прямоугольником с углами C5, H5, C9 и H9.
Изображенный на фиг. 7b участок 147 стены шахты лифта расположен смещенным, например, вбок, по сравнению с участком 140 на фиг. 7a. На этом участке 147 следует осуществлять второе сверление, правда, положение сверления нельзя выбирать свободно, а оно должно быть с заданным расположением к первому положению сверления на участке 140 согласно фиг. 7a. Второе взаимосвязанное с первым положением сверления положение сверления следует располагать, например, с определенным боковым смещением на определенное расстояние относительно первого положения сверления. В изображенном примере выполнения участок 147 на фиг. 7b расположен с боковым смещением на это расстояние относительно участка 140 на фиг. 7a. Взаимосвязанные первое и второе положения сверления в примере по фиг. 7a и фиг. 7b расположены в совпадающих квадратных ячейках. При осуществлении первого сверления в квадратной ячейке B2, на участке 140 по фиг. 7a, второе сверление следует выполнять на участке 147 по фиг. 7b также в квадратной ячейке B2. Этим достигают, что второе сверление позиционировано точно напротив первого сверления.
Так, как арматуры в стенах одинаково не направлены по всей их длине, прохождение арматуры 141, 142, 143, 144 на фиг. 7b не идентично фиг. 7a. Первая арматура 141 проходит на фиг. 7b из D1 в D10, а вторая арматура 142 из Jl в J10. Третья арматура 143 проходит на фиг. 7b из A5 в J5, а четвертая арматура 144 на фиг. 7a из A10 в J10.
После того, как это описано в отношении фиг. 7a, а также для участка 147 по фиг. 7b, сформировано изображение расположения арматуры 141, 142, 143, 144, можно определять второй возможный участок 148 для второго положения сверления. На фиг. 7b этот второй возможный участок 148 является прямоугольником с углами E6,16, E9 и 19. Возможные участки для первого и второго положения сверления получаются из участка нахлеста первого участка 146 и второго участка 148. Вследствие этого для первого положения сверления получают прямоугольный участок 149, а для второго положения сверления - прямоугольный участок 150, соответственно с углами E6, H6, E9, H9. Из этих участков 149, 150 можно выбирать квадратную ячейку для первого и второго положения сверления. В изображенном на фиг. 7a и фиг. 7b примере первое положение 170 сверления по фиг. 7a и второе положение 171 сверления по фиг. 7b соответственно определены в квадратной ячейке E7.
Посредством фиг. 8a и 8b описан альтернативный способ определения первого и взаимосвязанного второго положения сверления. Компоновка арматуры 141, 142, 143,144 на фиг. 8a соответствует компоновке на фиг. 7a, а компоновка на фиг. 8b - компоновке на фиг. 7b. Разделение на квадратные ячейки также идентично.
Сначала определяют согласно фиг. 8a возможное положение для первого положения сверления. Для этого проверяют с помощью компонента 23 детектирования арматуры возможно ли сверление в нужном положении сверления, в данном случае D5 сверление. В данном случае это так. Затем ищут другие возможные положения для первого положения сверления. Для этого, исходя от нужного положения D5 сверления проверяют по спирали, по часовой стрелке другие квадратные ячейки, в данном случае по очереди: E5, E6 и D6. Как только найдены четыре возможных положения, поиск других возможных положений прекращается. В случае, если одно из положений невозможно из-за арматуры, поиск продолжается до тех пор, пока не будут найдены четыре возможных положения.
Затем, как это изображено на фиг. 8b ищут возможное второе положение сверления. Вследствие описанного соответствия обоих положений сверления, второе положение сверления должно располагаться в той же самой квадратной ячейке, как первое положение сверления. Прежде всего проверяют, возможно ли нужное положение сверления, в данном случае D5 также и для второго положения сверления. В показанном примере это невозможно из-за столкновения с арматурой 141, поэтому аналогично способу действия для первого положения сверления, по спирали ищут дальше. Второе возможное положение E5 невозможно из-за столкновения с арматурой 143. Третье возможное положение E6 возможно, поэтому в изображенном на фиг. 8a и фиг. 8b примере первое положение сверления 172 на фиг. 8a и второе положение сверления 173 на фиг. 8b определены соответственно в квадратной ячейке E6.
В заключение следует обратить внимание на то, что понятия "имеющий", "содержащий" и т.д. не исключают другие элементы или этапы, а такие понятия как "одна" или "один" не исключают "множество". Кроме того, следует обратить внимание на то, что признаки или этапы, описанные со ссылкой на один из вышеупомянутых примеров выполнения, можно использовать также в комбинации с другими признаками или этапами других выше описанных примеров выполнения. Ссылочные позиции в Формуле изобретения не следует рассматривать как ограничение.
Реферат
Изобретение относится к монтажному устройству для осуществления процесса монтажа подъемного устройства в шахте лифта. Монтажное устройство имеет несущий компонент (3) и мехатронный монтажный компонент (5). Несущий компонент (3) сконструирован для перемещения внутри шахты лифта. Монтажный компонент (5) фиксирован на несущем компоненте (3) и сконструирован для осуществления этапа монтажа в ходе процесса монтажа, по меньшей мере, полуавтоматически. В частности, монтажный компонент может быть выполнен в виде промышленного робота (7). С помощью монтажного устройства (1) сверление отверстий может производиться частично или полностью автоматически. Кроме того, частично или полностью автоматически могут производиться, например, другие повторяющиеся монтажные работы такие, как завинчивание винтов и т.д. Монтажное устройство (1) имеет также компонент (23) детектирования арматуры, выполненный с возможностью обнаружения арматуры внутри стены шахты лифта. Этим можно снизить трудоемкость монтажа, сократить время и/или затраты. 2 н. и 11 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для крепления направляющей кабины лифта
Комментарии