Фаза пуска спасательного рейса подъемника при ограниченном электропитании, производимая под действием силы тяжести - RU2535117C2
Код документа: RU2535117C2
Чертежи


Описание
При потере основного электропитания подъемной системы прерывается подача электропитания к подъемному двигателю подъемника и аварийному тормозу, относящемуся к кабине подъемника. Это вынуждает подъемный двигатель прекратить приведение кабины в движение и принуждает аварийный тормоз (который выведен из взаимодействия при нахождении под напряжением) опуститься для взаимодействия с приводным валом. В результате кабина почти сразу же останавливается. Так как остановка может произойти случайно в любом месте в пределах шахты подъемника, пассажиры могут оказаться заблокированы в кабине подъемника между этажами. В известных системах пассажиры, заблокированные в кабине подъемника между этажами, должны ждать, пока технический работник сможет высвободить тормоз и осуществить контролируемое перемещение кабины подъемника вверх или вниз к ближайшему этажу. Может потребоваться некоторое время, прежде чем технический работник прибудет и сможет выполнить спасательный рейс.
Известны подъемные системы, которые реализуют автоматические спасательные рейсы (АСР). Указанные подъемные системы содержат источник резервного электропитания, который используется после прекращения подачи основного электропитания для подачи резервного электропитания с целью перемещения кабины подъемника к ближайшему этажу. Традиционные системы с автоматическим спасательным рейсом обычно в качестве источника резервного электропитания используют аккумулятор. Они стремятся направить спасательный рейс в «легком» направлении, т.е. в направлении, в котором кабина подъемника стремится перемещаться под действием силы тяжести, возникающей при разности между весом кабины со всеми пассажирами и противовесом. Системы с автоматическим спасательным рейсом для определения «легкого» направления используют взвешивающие устройства для взвешивания нагрузки. Ток удержания подается к подъемному двигателю для создания крутящего момента в направлении, противоположном направлению дисбаланса нагрузки, определенному взвешивающим устройством для взвешивания нагрузки, так что кабина подъемника не будет двигаться, пока поднят тормоз. Как только поднимается тормоз, система стремится перемещать кабину подъемника в «легком» направлении, как указывают сигналы от взвешивающего устройства для взвешивания нагрузки. Аккумулятор, а также схема электропитания должны быть выполнены с расчетом подачи пикового тока удержания при максимальной нагрузке в кабине подъемника.
В некоторых случаях может быть затруднительным определение «легкого» направления с использованием взвешивающих устройств для взвешивания нагрузки. Если «легкое» направление определено неверно из-за того, что взвешивание нагрузки было неверным или были ошибочно истолкованы сигналы взвешивания, может быть предпринята попытка перемещения кабины подъемника в «тяжелом» направлении. Это может привести к большим пиковым токам и повышенному энергопотреблению.
Система с автоматическим спасательным рейсом должна учитывать запас мощности и требует наличия логического устройства для обработки отказов в случае неверного взвешивания нагрузки и попытки осуществления рейса в «тяжелом» направлении. Пиковый ток и энергетические возможности, необходимые для пусковой фазы и для плана действий в случае неисправности, когда предпринята попытка перемещения кабины подъемника в «тяжелом» направлении, существенно превышают необходимые условия для перемещения сбалансированной нагрузки или для работы подъемника, когда пусковая фаза пройдена и подъемник движется в «легком» направлении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Автоматический спасательный рейс при ограниченном электропитании осуществляется путем поднятия тормоза без подачи удерживающего момента к подъемному двигателю. Если между кабиной подъемника и противовесом существует значительный дисбаланс, кабина подъемника под действием силы тяжести будет двигаться в «легком» направлении. Направление и скорость перемещения кабины подъемника могут быть обнаружены. Когда кабина движется, двигатель активирован и синхронизирован с текущим перемещением кабины подъемника.
Синхронизированная работа двигателя управляет ходом спасательного рейса до тех пор, пока кабина подъемника не достигает своего заданного положения. Если кабина подъемника и противовес сбалансированы таким образом, что кабина подъемника не движется, к подъемному двигателю подают резервное электропитание для перемещения кабины подъемника в выбранном направлении к заданному месту назначения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 изображена структурная схема подъемника, в котором используется фаза пуска спасательного рейса подъемника при ограниченном электропитании, производимая под действием силы тяжести.
На фиг.2 изображена блок-схема автоматического спасательного рейса в системе, показанной на фиг.1.
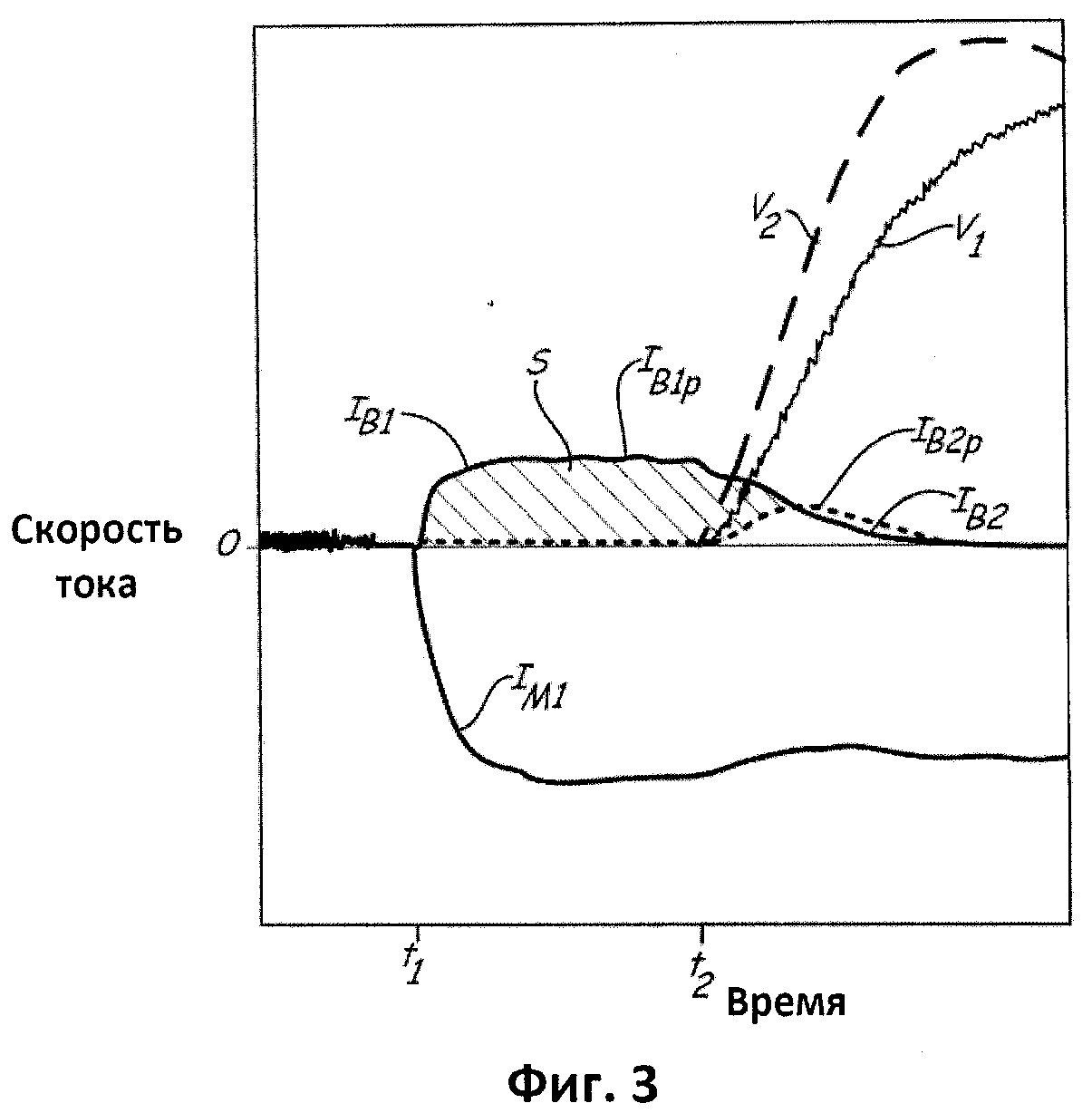
На фиг.3 изображен график, иллюстрирующий электрический ток аккумулятора, электрический ток двигателя и скорость кабины подъемника при традиционном автоматическом спасательном рейсе и при автоматическом спасательном рейсе, проиллюстрированном на фиг.2.
На фиг.4 изображен график, иллюстрирующий скорость, электрический ток двигателя, электрический ток аккумулятора и обратную связь с шиной напряжения для традиционной системы с автоматическим спасательным рейсом, в которой спасательный рейс в исходном положении сначала запускается в «тяжелом» направлении, за которым следует пуск в «легком» направлении.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг.1 изображена структурная схема подъемной системы 10, которая имеет функцию автоматического спасательного рейса с фазой пуска привода под действием силы тяжести. Подъемная система 10 содержит кабину 12 подъемника, противовес 14, канатное приспособление 16, блоки 18 и 20, ведущий шкив 22, подъемный двигатель 24, кодирующее устройство 26, тормоз 28, переключатели 30 тормоза, взвешивающее устройство 32 для взвешивания нагрузки, рекуперативный привод 34, управляющий блок 36 для управления подъемником, управляющую систему 38 для управления электропитанием, систему 40 дверей, главный управляющий трансформатор 42, прерыватель 44 главной цепи, источник 46 резервного электропитания, реле 48 (содержащее релейную катушку 50 и релейные контакты 52А, 52В и 52С) и инвертор 54.
В показанной на фиг.1 схеме кабина 12 и противовес 14 подвешены на канатном приспособлении 16 со схемой запасовки канатов 2:1. Канатное приспособление 16 проходит от точки 56 закрепления вниз к блоку 18, затем вверх над шкивом 22, вниз к блоку 20 и вверх к взвешивающему устройству 32 и точке 58 закрепления. Могут быть использованы другие канатные компоновки, в том числе 1:1, 4:1, 8:1 и другие.
Кабина 12 движется вверх, а противовес 14 движется вниз, когда шкив 22 вращается в одном направлении. Кабина 12 движется вниз, а противовес 14 движется вверх, когда шкив 22 вращается в противоположном направлении. Противовес 14 выбран приблизительно равным весу кабины 12 со средним количеством пассажиров. Взвешивающее устройство 32 соединено с канатным приспособлением 16 для обеспечения индикации общего веса кабины 12 с пассажирами. Взвешивающее устройство 32 может быть расположено в различных местах, например на анкерном шарнире, на канатном приспособлении 16, на крыше кабины 12, под платформой кабины 12 и т.д. Взвешивающее устройство 32 передает измеренный вес нагрузки на рекуперативный привод 34.
Ведущий шкив 22 соединен с подъемным двигателем 24, который регулирует скорость и направление перемещения кабины 12. Двигатель 24 представляет собой, например, синхронный двигатель на постоянных магнитах, который может работать в режиме двигателя или в режиме генератора. Когда двигатель 24 работает в режиме двигателя, он получает выходное электропитание трехфазного переменного тока от рекуперативного привода 34 для обеспечения вращения шкива 22. Направление вращения подъемного двигателя 24 зависит от фазового соотношения фаз трех силовых фаз переменного тока. Когда двигатель 24 работает в режиме генератора, шкив 22 вращает двигатель 24 и обеспечивает подачу электропитания переменного тока от двигателя 24 к рекуперативному приводу 34.
На валу двигателя 24 также установлены кодирующее устройство 26 и тормоз 28. Кодирующее устройство 26 передает сигналы к рекуперативному приводу 34 для того, чтобы синхронизировать импульсы, подаваемые к двигателю 24, для обеспечения работы подъемного двигателя 24 либо в режиме двигателя, либо в режиме генератора.
Тормоз 28 предотвращает вращение двигателя 24 и ведущего шкива 22. Тормоз 28 представляет собой электрически активируемый тормоз, который оказывается поднятым или выведенным из взаимодействия с валом двигателя в случае подачи на него электропитания от рекуперативного привода 34. При снятии электропитания с тормоза 28, он опускается или входит во взаимодействие с валом подъемного двигателя 24 (или закрепляется на валу) для предотвращения вращения. Переключатели 30 тормоза или другие датчики (например, оптический датчик, ультразвуковой датчик, датчик Холла, датчик тормозного тока) отслеживают состояние тормоза 28 и передают входные сигналы на рекуперативный привод 34.
Электропитание, необходимое для приведения в действие двигателя 24, меняется в зависимости от ускорения и направления перемещения кабины 12, а также от нагрузки в кабине 12. Если кабина 12 ускоряется или поднимается вверх с нагрузкой, которая больше противовеса 14, или опускается вниз с нагрузкой, которая меньше противовеса 14, требуется подача электропитания от привода 34 к подъемному двигателю 24, который, в свою очередь, вращает шкив 22. Если кабина 12 выровнена или движется с постоянной скоростью со сбалансированной нагрузкой, может потребоваться меньшее электропитание, подаваемое к двигателю 24 от рекуперативного привода 34. Если кабина 12 замедляется или движется вниз с нагрузкой, которая больше противовеса 14, или поднимается вверх с нагрузкой, которая меньше противовеса 14, кабина 12 приводит в действие шкив 22 и двигатель 24. В этом случае двигатель 24 работает в режиме генератора и генерирует трехфазный переменный ток, подаваемый к рекуперативному приводу 34.
При нормальной работе рекуперативный привод 34 получает трехфазный переменный ток от основного источника электропитания, такого как электрическая сеть. Трехфазный переменный ток подают к рекуперативному приводу 34 по контактам 44А главной цепи и релейным контактам 52В.
Рекуперативный привод 34 имеет приемный вход 60 для приема трехфазного переменного тока, импульсный источник 62 электропитания (SMPS), преобразователь постоянного тока 64, интерфейс 66 и блок 68 питания тормоза. Трехфазный переменный ток от основного источника электропитания принимается на приемном входе 60 и передается к импульсному источнику 62. Входящее трехфазное электропитание выпрямляют для генерации постоянного тока на шине постоянного тока. Постоянный ток инвертируют с целью получения переменного тока для приведения в действие двигателя 24. Преобразователь 64 работает при потере трехфазного тока для подачи резервного постоянного тока на шину постоянного тока импульсного источника 62. Преобразователь 64 получает электропитание от источника 46 через релейные контакты 52, когда необходимо выполнить спасательный рейс, и преобразует напряжение источника 46 до уровня напряжения, который требуется на шине постоянного тока импульсного источника 62.
Блок 68 питания тормоза привода 34 получает электропитание от трансформатора 42 (или альтернативно от другого источника, такого как импульсный источник 62) для управления работой тормоза 28. Привод 34 взаимодействует с управляющей системой 38 управляющим блоком 36 через интерфейс 66. Управляющий блок 36 передает управляющие сигналы к приводу 34 для управления перемещением кабины 12 в шахте подъемника. Управляющие сигналы могут содержать команды, инструктирующие привод 34, когда и в каком направлении осуществлять привод кабины 12, а также команды, указывающие, когда поднять тормоз 28 для того, обеспечить перемещение кабины 12, и когда опустить тормоз 28 для того, чтобы остановить перемещение кабины 12. Привод 34 получает управляющие сигналы от управляющей системы 38 для того, чтобы координировать автоматический спасательный рейс с использованием электропитания от источника 46.
Управляющий блок 36 управляет перемещением кабины 12 в шахте подъемника. Как показано на фиг.1, управляющий блок 36 содержит интерфейс 70 и предохранительную цепь 72. Управляющий блок 36 взаимодействует с приводом 34 и управляющей системой 38 через интерфейс 70. Цепь 72 используется для предотвращения перемещения кабины 12 в шахте подъемника в потенциально опасных условиях. Цепь 72 может содержать переключающие контакты, связанные с работой шахтных дверей, а также другие датчики, которые осуществляют индикацию условий, при которых кабина 12 не должна двигаться. Если какой-нибудь из контактов открыт, цепь 72 оказывается разомкнутой и управляющий блок 36 запрещает работу до тех пор, пока цепь 72 вновь не будет замкнута. Управляющий блок 36, как часть тормоза в цепи 72, может передавать управляющий сигнал к приводу 34 для обеспечения опускания тормоза 28.
Управляющий блок 36 также получает сигналы, основанные на командах пользователя, полученных через кнопки вызова из холла или через устройства ввода на панели управления внутри кабины 12. Управляющий блок 36 (или привод 34) определяет направление, в котором кабина 12 должна двигаться, и этажи, на которых она должна останавливаться.
Управляющая система 38 содержит интерфейс 80, устройство 82 контроля заряда, устройство 84 контроля реле, устройство 86 контроля электропитания преобразователя, блок 88 управления спасательным рейсом и управляющий вход 90 для управления зарядом и электропитанием. Интерфейс 80 позволяет управляющей системе 38 взаимодействовать как с управляющим блоком 36, так и с приводом 34. Функцией управляющей системы 38 в сочетании с приводом 34 и управляющим блоком 36 является осуществление автоматического спасательного рейса в подъемной системе 10 с использованием электропитания от источника 46 в случае потери трехфазного электропитания от основного источника электропитания.
Устройство 82 управляющей системы 38 отслеживает напряжение источника 46. Блок 88 отслеживает состояние прерывателя 44 путем отслеживания состояния дополнительных контактов 44В. Управляющий вход 90 позволяет управляющей системе 38 отслеживать электропитание от трансформатора 42 путем осуществления индикации подачи электропитания к системе 40 и трансформатору 42 через релейные контакты 52А.
Интерфейс 80 управляющей системы 38 обеспечивает передачу управляющего сигнала к интерфейсу 66 привода 34, если управляющая система 38 определяет необходимость выполнения автоматического спасательного рейса. Управляющий сигнал заставляет привод 34 преобразовывать электропитание от источника 46 с использованием преобразователя 64.
Устройство 84 управляет состоянием реле 48 путем селективной подачи электропитания к релейной катушке 50. После подачи электропитания к релейной катушке 50 с помощью устройства 84 релейные контакты 52А, 52В и 52С переходят из первого состояния, соответствующего нормальной работе подъемника 10, во второе состояние, соответствующее автоматическому спасательному рейсу. На фиг.1 релейные контакты 52А, 52В и 52С изображены в первом состоянии в режиме нормальной работы подъемника 10.
Во время автоматического спасательного рейса преобразователь 86 электропитания управляющей системы 38 активирует инвертор 54.
Электропитание подают от источника 46 через устройство 82 и преобразователь 86 к входу постоянного тока инвертора 54.
Система 40, которая может содержать систему 92 передних дверей и систему 94 задних дверей, открывает и закрывает двери подъемника, когда кабина 12 находится на площадке. Система 40 использует однофазный переменный ток, который при нормальной работе принимается от основного источника электропитания, а при автоматическом спасательном рейсе - от инвертора 54.
Трансформатор 42 передает электропитание к управляющему блоку 36 по цепи 72. Кроме того, он передает электропитание к управляющей системе 38 через управляющий вход 90. Он передает электропитание к источнику 46 через управляющий вход 90 и устройство 82. Электропитание к приводу 34 подают от основного источника электропитания через контакты 52В и приемный вход 60 при нормальной работе и от источника 46 через контакты 52С на приемный вход 60 и к преобразователю 64. При нормальной работе трансформатор 42 использует две фазы из трех трехфазного переменного тока, подаваемого от основного источника электропитания. Во время автоматического спасательного рейса трансформатор 42 принимает две фазы переменного тока от инвертора 54.
При нормальной работе электропитание для работы подъемника 10 подают от основного источника электропитания. Трехфазный переменный ток проходит через прерыватель 44, потому что контакты 44А закрыты. Электропитание передают через релейные контакты 52А к системе 40 и к трансформатору 42. Кроме того, трехфазное электропитание подают через релейные контакты 52В к приемному входу 60 привода 34. Электропитание для работы управляющего блока 36, управляющей системы 38 и тормозной системы привода 34 производится трансформатором 42 на основе электропитания, полученного через релейные контакты 52А. На основании сигналов, полученных управляющим блоком 36, привод 34 перемещает кабину 12 в шахте подъемника для спасения пассажиров.
Во время нормальной работы управляющая система 38 отслеживает состояние прерывателя 44 через дополнительные контакты 44В. Дополнительные контакты 44В позволяют управляющей системе 38 удостовериться в том, что прерыватель 44 закрыт. Если все еще поступает электропитание от трансформатора 42, управляющая система 38 определяет, что имеет место нормальная работа и источник 46 не требуется.
Если открывается прерыватель 44, то происходит изменение состояний дополнительных контактов 44В. К управляющей системе 38 поступают сигналы о том, что прерыватель 44 открыт.Обычно это указывает на то, что технический специалист сервисной службы отключил подъемник 10. В таком случае, хотя переменный ток больше не поступает к приводу 34, автоматический спасательный рейс не требуется.
Когда прерыватель 44 закрыт, а электропитание больше не поступает от трансформатора 42, управляющая система 38 инициирует автоматический спасательный рейс. Устройство 84 включает релейную катушку 50, которая изменяет состояние контактов 52А, 52В и 52С. Во время автоматического спасательного рейса контакты 52А отсоединяют основной источник электропитания от системы 40 и от трансформатора 42. Вместо этого к системе 40 и трансформатору 42 через релейные контакты 52А подсоединяют инвертор 54.
Релейные контакты 52В изменяют свое состояние так, что основной источник электропитания отсоединяется от приемного входа 60 привода 34. Во время автоматического спасательного рейса контакты 52С закрыты, так что источник 46 подсоединен к входу преобразователя 64 и к приемному входу 60.
Во время автоматического спасательного рейса источник 46 обеспечивает электропитание, используемое приводом 34, для перемещения кабины 12 к площадке, на которой пассажиры могут выйти из подъемника. Кроме того, постоянный ток от источника 46 преобразуется в переменный ток с помощью инвертора 54 и используется для обеспечения электропитания для системы 40 и трансформатора 42. Во время автоматического спасательного рейса электропитание от трансформатора 42 используется для питания управляющего блока 36 и для питания тормозной системы 68 с целью осуществления управления тормозом 28.
В случае прекращения подачи потребляемой от сети электроэнергии к подъемнику 10, прекращается подача электропитания к приводу 34. Это заставляет подъемный двигатель 24 прекратить перемещение кабины 12. Кроме того, потеря электропитания приводит к опусканию тормоза 28, так что перемещение кабины 12 почти сразу же прекращается. Так как потеря электропитания происходит неожиданным образом, кабина 12 с заблокированными внутри нее пассажирами может остановиться между этажами.
Автоматический спасательный рейс в подъемной системе 10 позволяет перемещать кабину 12 к ближайшему этажу, на котором пассажиры могут выйти. Автоматический спасательный рейс может быть выполнен без задержки на ожидание технического работника сервисной службы, который высвобождает тормоз и регулирует перемещение кабины 12 к ближайшему этажу. Электропитание для проведения автоматического спасательного рейса подается от источника 46, который обычно является аккумулятором. Например, источник 46 может быть аккумулятором на 48 вольт. Величина электропитания, потребляемого при проведении автоматического спасательного рейса, влияет на размер и стоимость аккумулятора, используемого в качестве источника 46. Факторы включают величину необходимого для хранения в аккумуляторе заряда, а также пикового тока в аккумуляторе во время проведения автоматического спасательного рейса. Уменьшение полного необходимого заряда и снижение требований к пиковому току в аккумуляторе существенно уменьшают размер и стоимость аккумулятора.
В большинстве случаев, в которых прекращена подача электропитания от основного источника электропитания, а кабина 12 заблокирована между этажами, существует дисбаланс нагрузки между общим весом кабины 12 (весом кабины 12 с пассажирами внутри) и противовесом 14. Если противовес 14 тяжелее, то кабина 12 движется вверх в «легком» направлении, в котором требуется меньше электроэнергии, и вниз в «тяжелом» направлении, в котором требуется больше электроэнергии. И наоборот, если общий вес кабины подъемника больше, чем противовес 14, кабина подъемника может перемещаться вниз в «легком» направлении и вверх в «тяжелом» направлении.
Пуск автоматического спасательного рейса при ограниченном электропитании (т.е. подаваемом от аккумулятора) осуществляется поднятием тормоза 28 без создания удерживающего момента, приложенного к двигателю 24. Если между кабиной 12 и противовесом 14 существует значительный дисбаланс, сила тяжести вынуждает кабину подъемника перемещаться в «легком» направлении. Скорость и направление перемещения могут быть определены с помощью сигналов от кодирующего устройства 26. Когда достигнут заданный, все еще низкий уровень скорости, при котором двигатель 24 может работать в режиме генератора, активируется схема управления двигателем импульсного источника 62. Управление двигателем 24 синхронизировано с перемещением, происходящим на основании сигналов от кодирующего устройства, обеспечивающего информацию о скорости и положении ротора. Работа двигателя 24 синхронизирована с происходящим перемещением кабины 12 и управляет ходом спасательного рейса до тех пор, пока кабина 12 не достигает заданного положения. Для уменьшения токов торможения может быть использован тормоз 28, который замедляет и прекращает перемещение кабины 12 в заданном положении.
На фиг.2 изображена блок-схема автоматического спасательного рейса (АСР). Автоматический спасательный рейс 100 начинается, когда управляющая система 38 определяет, что прервана подача электропитания от основного источника (например, прервана подача электропитания от трансформатора 42) и что прерыватель 44 все еще закрыт.Управляющая система 38 получает запрос на проведение автоматического спасательного рейса, который передают на привод 34. Кроме того, управляющая система 38 управляет реле 48, так что электропитание подается от источника 46, а не от основного источника электропитания.
В ответ на запрос на проведение автоматического спасательного рейса, привод 34 поднимает тормоз 28 (на этапе 104). Электропитание для поднятия тормоза 28 подают к приводу 34 с помощью трансформатора 42, который теперь получает переменный ток от инвертора 54.
Привод 34 отслеживает сигналы от кодирующего устройства 26 для того, чтобы определить перемещение кабины 12 (на этапе 106). Если сигналы от кодирующего устройства показывают, что кабина подъемника перемещается, привод 34 по сигналам от кодирующего устройства определяет скорость перемещения кабины подъемника и сравнивает эту скорость с пороговой скоростью (на этапе 108). Если измеренная скорость меньше порогового значения для двигателя 24, работающего в режиме генератора, привод 34 не подает ток к двигателю 24 для создания двигательного момента. Вместо этого привод 34 продолжает отслеживать скорость и сравнивать ее с пороговым значением до тех пор, пока скорость не превысит пороговое значение, на котором двигатель 24 будет находиться в рабочем режиме, в котором электропитание, подаваемое или генерируемое двигателем 24, является очень низким.
Если скорость кабины подъемника, измеренная с помощью кодирующего устройства 26, превышает пороговое значение, привод 34 прикладывает двигательный момент путем синхронизации пусковых импульсов статора с двигателем 24. Синхронизации достигают с использованием сигналов от кодирующего устройства 26, которое показывает скорость и положение ротора двигателя 24. Привод 34 замыкает контур управления для поддержания скорости кабины 12 в пределах желаемого диапазона во время автоматического спасательного рейса (на этапе 110).
Если на этапе 106 после поднятия тормоза 28 (на этапе 104) перемещение кабины подъемника не обнаружено, привод 34 определяет, прошло ли максимальное время ожидания (на этапе 112). Привод 34 продолжает отслеживать перемещение кабины подъемника до тех пор, пока не пройдет максимальное время ожидания. Когда указанное время пройдет без достижения порогового значения скорости, привод 34 определяет, что достигнуто условие сбалансированности нагрузки (на этапе 114). Затем привод 34 прикладывает двигательный момент, так что режим автоматического спасательного рейса выполняется в предпочтительном направлении, которое было определено управляющим блоком 36. Например, по направлению к ближайшему этажу или, возможно, к этажу, на котором есть доступ к аварийному выходу. После приложения приводом 34 на этапе 114 двигательного момента он переходит к этапу 110, на котором устанавливают скорость кабины 12 во время проведения автоматического спасательного рейса.
Управляющий блок 36 отслеживает датчики зоны двери для того, чтобы определить, достигнута ли зона двери (на этапе 116). Когда зона двери достигнута, управляющий блок 36 передает сигнал к приводу 34, который прикладывает тормозной момент посредством двигателя 24. Тормозной момент прикладывают в пределах ограничений аккумулятора, определенных для источника 46 (на этапе 118).
Привод 34 отслеживает сигналы от кодирующего устройства для того, чтобы определить, остановилась ли кабина 12, а управляющий блок 36 отслеживает датчики зоны двери для того, чтобы определить, достигла ли кабина 12 середины зоны двери (на этапе 120). Когда кабина 12 подъемника остановилась или достигла середины зоны двери, привод 34 опускает тормоз 28 (на этапе 122).
Автоматический спасательный рейс в фазе пуска, производимого под действием силы тяжести (или «пуск со свободным качением»), сберегает затраты и пространство, необходимые для источника 46. Она снижает требования к подаче пикового тока, предъявляемые к основному источнику электропитания, а также требования к запасу энергии в источнике 46. Указанное сбережение может быть достигнуто как за счет источника 46, так и за счет цепи автоматического спасательного рейса (например, реле 48 и инвертора 54). Использование пуска со свободным качением позволяет избежать ошибочных попыток перемещения кабины подъемника в «тяжелом» направлении в случае неисправности взвешивающего устройства 32.
На фиг.3 изображен график, на котором показано сравнение «традиционного пуска» режима автоматического спасательного рейса, который включает приложение тока удержания во время поднятия тормоза, с «пуском со свободным качением» режима автоматического спасательного рейса. Традиционный пуск проиллюстрирован током IB1аккумулятора, током IM1 двигателя и скоростью V1. Пуск со свободным качением проиллюстрирован током IВ2 аккумулятора и скоростью V2.
При традиционном пуске в режиме автоматического спасательного рейса на основании сигналов от взвешивающего устройства для взвешивания нагрузки оценивается величина нагрузки. На основании этой информации к двигателю нагрузки предварительно прикладывается двигательный момент, когда тормоз еще опущен. Ток IB1 аккумулятора положительный, а ток IM1 двигателя отрицательный. Скорость V1 равна нулю, так как в этот момент тормоз еще опущен.
В интервале времени между t1 и t2 тормоз поднят. Скорость V1 начинает увеличиваться от нуля приблизительно со времени t2. В то же время ток IB1 аккумулятора начинает уменьшаться, и магнитуда тока IM1 двигателя также уменьшается (становится менее отрицательной). Так как подъемный двигатель начинает работать в режиме генератора, ток IB1 аккумулятора уменьшается до нуля.
При пуске со свободным качением согласно изобретению ток аккумулятора и ток двигателя не используются для подачи удерживающего момента. Вместо этого поднимают тормоз 28, и кабина 12 начинает перемещаться в «легком» направлении при наличии дисбаланса между кабиной 12 и противовесом 14. Скорость V2 начинает увеличиваться от нуля приблизительно со времени t2, после чего поднимается тормоз 28 и кабина 12 освобождается для перемещения. При условии что кабина 12 перемещается и достигает пороговой скорости, подают ток IВ2 аккумулятора для того, чтобы обеспечить работу двигателя 24 в режиме генератора. Однако пиковый ток IB2 значительно меньше, чем пиковый ток IB1. Кроме того, ток IВ2 начинает уменьшаться, когда двигатель 24 работает в режиме генератора для подачи рекуперированной электроэнергии обратно к шине постоянного тока импульсного источника 62.
Заштрихованным участком S на фиг.3 обозначено сбережение емкости аккумулятора, полученное при использовании автоматического спасательного рейса с пуском со свободным качением согласно изобретению. Заштрихованный участок представляет разность между зарядом, поданным аккумулятором при традиционном пуске, и зарядом, поданным аккумулятором при пуске со свободным качением.
Разность между пиковым током IB1p и пиковым током IВ2р представляет собой уменьшение пикового тока аккумулятора, достигнутое благодаря использованию настоящего изобретения. Путем снижения требуемой емкости аккумулятора и требуемого пикового тока может быть достигнуто уменьшение размера и понижение класса источника 46.
На фиг.4 изображены эффекты традиционного пуска автоматического спасательного рейса, когда по ошибке предпринята попытка перемещения кабины подъемника в «тяжелом» направлении, а не в «легком» направлении. Как изображено на фиг.4, системой на начальной стадии предпринята попытка перемещения кабины подъемника в «тяжелом» направлении, за ней следует пуск в «легком» направлении. Скорость VH, ток IМH двигателя и ток IВH аккумулятора при пуске в «тяжелом» направлении изображены в интервале времени между t1 и t2. Последующий пуск в «легком» направлении начинается в момент времени t3. На чертеже изображены скорость VL, ток IML двигателя и ток IBL аккумулятора. Сравнение тока IBH аккумулятора при пуске в «тяжелом» направлении с током IBL аккумулятора при пуске в «легком» направлении обнаруживает значительный расход энергии, который происходит, если по ошибке предпринята попытка осуществления автоматического спасательного рейса в «тяжелом» направлении. Такое происходит при традиционном пуске автоматического спасательного рейса, например, в результате неисправности взвешивающего устройства для взвешивания нагрузки или ошибочных показаний такого устройства.
Автоматический спасательный рейс с пуском со свободным качением позволяет избежать ситуаций, в которых может быть предпринята попытка пуска в «тяжелом» направлении. Путем освобождения тормоза и обеспечения возможности перемещения кабины 12 и противовеса 14 под действием силы тяжести, а также путем последующего измерения скорости и направления перемещения исключается зависимость предлагаемого автоматического спасательного рейса от правильной работы взвешивающего устройства 32, которое определяет направление перемещения. В результате обеспечивается возможность избежать ошибочных попыток перемещения кабины подъемника в «тяжелом» направлении.
В выше описанных вариантах реализации кодирующее устройство 26 используется для обнаружения перемещения кабины 12 и для передачи сигналов, использующихся для синхронизации работы двигателя 24 с перемещением кабины 12. В других вариантах перемещение кабины 12 может быть определено косвенным методом по самому двигателю 24 (например, путем наблюдения обратной электродвижущей силы или изменений индуктивности для определения положения ротора) или с использованием датчиков положения кабины подъемника, не зависимых от двигателя 24 (таких как механические, ультразвуковые, лазерные или другие оптические датчики). В результате обнаружения формируется сигнал (или сигналы), который обеспечивает системе возможность наблюдать перемещение кабины 12.
Несмотря на то что настоящее изобретение описано со ссылками на предпочтительные варианты реализации, специалистам в данной области понятно, что в форму и детали могут быть внесены изменения без отступления от сущности и объема изобретения.
Реферат
Изобретение относится к области управления лифтами. При потере основного электропитания подъемной системы 10 автоматический спасательный рейс осуществляется с использованием электропитания от источника 46 резервного электропитания. Спасательный рейс в подъемнике, остановившемся между этажами, инициируют поднятием тормоза 28 и с обеспечением перемещения кабины 12 подъемника под действием силы тяжести. Если кабина 12 подъемника перемещается вследствие дисбаланса между весом кабины 12 подъемника и противовесом 14, работа двигателя 24 синхронизируется с обнаруженным перемещением кабины 12 для того, чтобы генерировать электричество. Если вес сбалансирован, так что кабина 12 подъемника не перемещается, к двигателю 24 подают резервное электропитание для того, чтобы приложить двигательный момент к кабине 12 в выбранном направлении во время этого спасательного рейса. Достигается оптимизация работы лифтовой установки. 3 н. и 17 з.п. ф-лы, 4 ил.
Формула
удерживают кабину подъемника на месте с помощью тормоза;
инициируют посредством привода спасательный рейс путем поднятия тормоза для обеспечения перемещения кабины под действием силы тяжести;
обнаруживают перемещение кабины;
если кабина не перемещается, привод подает резервное электропитание к двигателю для приложения двигательного момента с целью приведения кабины в движение в выбранном направлении во время спасательного рейса; а
если кабина перемещается, привод подает резервное электропитание к двигателю для создания двигательного момента, синхронизированного с обнаруженным перемещением кабины, во время спасательного рейса в направлении обнаруженного перемещения.
определяют, когда кабина достигает зоны двери;
подают тормозной двигательный момент для замедления перемещения кабины.
опускают тормоз, когда кабина подъемника останавливается или достигает середины зоны двери.
регулируют двигательный момент для поддержания скорости во время спасательного рейса в пределах требуемого диапазона.
кабину подъемника;
противовес;
шкив;
канатное приспособление, подвешивающее кабину и противовес и проходящее через шкив;
подъемный двигатель, который содержит вал, соединенный со шкивом;
датчик для подачи сигнала, отображающего перемещение кабины подъемника;
тормоз для предотвращения вращения вала;
систему управления электропитанием для обнаружения потери основного электропитания и обеспечения подачи резервного электропитания;
привод для управления работой подъемного двигателя, который в ответ на потерю основного электропитания
инициирует автоматический спасательный рейс путем поднятия тормоза для обеспечения перемещения кабины подъемника под действием силы тяжести,
прилагает двигательный момент для обеспечения работы подъемного двигателя в режиме генератора, когда кабина подъемника перемещается под действием силы тяжести во время спасательного рейса, и
прикладывает двигательный момент для обеспечения работы подъемного двигателя в режиме двигателя для обеспечения перемещения кабины подъемника, когда она не в состоянии перемещаться под действием силы тяжести во время спасательного рейса.
определяют посредством системы управления электропитанием прерывание главного электропитания, которое приводит к удержанию кабины подъемника на месте с помощью тормоза;
инициируют посредством привода спасательный рейс путем поднятия тормоза с обеспечением перемещения кабины под действием силы тяжести;
обнаруживают перемещение кабины;
если кабина не перемещается под действием силы тяжести, привод подает резервное электропитание к двигателю от источника резервного электропитания для приложения двигательного момента с целью приведения кабины в движение в выбранном направлении во время спасательного рейса; а
если кабина перемещается под действием силы тяжести, привод подает резервное электропитание к двигателю для создания двигательного момента, синхронизированного с обнаруженным перемещением кабины во время спасательного рейса в направлении обнаруженного перемещения.
определяют, когда кабина достигает зоны двери;
подают тормозной двигательный момент для замедления перемещения кабины.
опускают тормоз, когда кабина останавливается или достигает середины зоны двери.
регулируют двигательный момент для поддержания скорости во время спасательного рейса в пределах требуемого диапазона.
Комментарии