Способ контроля тормозного механизма подъемной установки, способ пуска подъемной установки и устройство для осуществления пуска - RU2429186C2
Код документа: RU2429186C2
Чертежи
Описание
Изобретение относится к способу контроля тормозного механизма подъемной установки, способу пуска подъемной установки и устройству для осуществления пуска согласно ограничительным частям независимых пунктов формулы изобретения.
Подъемная установка смонтирована в шахте. Она состоит в основном из кабины, которая тяговыми канатами соединена с противовесом. Посредством привода, воздействующего выборочно на тяговые канаты, непосредственно на кабину или непосредственно на противовес, кабина движется по, в основном, вертикальной траектории.
Подобные подъемные установки имеют механические тормозные системы, которые обеспечивают остановку кабины в любом месте, могут тормозить подъемную установку или ее подвижные массы при нормальной работе или могут надежно остановить кабину в случае неисправности. Остановкой в любом месте является, например, остановка кабины на этаже с целью выхода или входа пассажиров или для ожидания следующей команды на движение. Торможением при нормальной работе является, например, процесс остановки, когда кабина прибывает на этаж, а торможение в случае неисправности требуется, если, например, происходит отказ управления, привода или тяговых канатов.
До сих пор для удовлетворения этих требований использовались, как правило, две тормозные системы, одна из которых расположена на самом приводе, а другая - на кабине. Контроль этих систем сложен, поскольку, с одной стороны, приходится контролировать две системы, а, с другой стороны, для контроля требуются, как правило, полностью загруженные кабины. Это является сложным делом потому, что к кабине приходится транспортировать дополнительный груз. Этот груз приходится часто транспортировать небольшими партиями, а во время теста возникает риск повреждения отделки кабины в результате соскальзывания этого дополнительного груза.
Из заявки заявителя ЕР 05111993.1 известна тормозная система, которая вместо двух тормозных систем нуждается только в одной тормозной системе. Раскрытый тормозной механизм подъемной установки тормозит и останавливает кабину и состоит из определенного числа тормозных блоков, которые в случае необходимости входят в контакт с тормозными направляющими, причем тормозной блок для этой цели прижимает, по меньшей мере, одну тормозную плиту к тормозной направляющей и создает тормозное усилие.
Эту тормозную систему следует контролировать особенно надежно и, тем не менее, эффективно.
Задачей изобретения является, следовательно, создание способа контроля, который обеспечивал бы эффективный и надежный контроль подобного тормозного механизма. Пуск соответствующей подъемной установки должен осуществляться просто. Преимущественно должны быть своевременно обнаружены возможные неисправности и эффективно верифицированы важные данные установки.
Эти задачи решаются согласно изобретению за счет того, что осуществляют контроль определенного числа тормозных блоков, которые в случае необходимости приводят в контакт с тормозными направляющими и которые выполнены с возможностью прижатия, по меньшей мере, соответственно одной тормозной плиты к тормозной направляющей, определяя созданный при прижатии тормозной плиты к тормозной направляющей эффективный коэффициент трения тормозного блока. За счет определения эффективного коэффициента трения тормозного блока могут быть своевременно обнаружены отклонения, и это определение обеспечивает надежные данные о функциональной способности тормозного блока. За счет соответствующего определения контроль может быть верифицирован длительно, т.е. при каждом использовании, что обеспечивает особенно надежное выполнение подобного тормозного блока.
В одном предпочтительном варианте эффективный коэффициент трения (µе) тормозного блока определяют посредством устройства измерения тормозного усилия и посредством устройства измерения нормального усилия для измерения активного тормозного подводящего усилия. Это особенно предпочтительно, поскольку измерения усилий, например с использованием тензометров, могут проводиться недорого. К тому же эффективный результирующий коэффициент трения тормозного блока может быть определен очень просто с использованием этих измеряемых величин.
Один вариант предусматривает, что для определения эффективного коэффициента трения (µe) тормозного блока последний приводят в контакт с тормозной направляющей и подводят с небольшим активным тормозным подводящим усилием (FNw), а кабину движут с небольшой скоростью, причем процесс движения продолжают или повторяют до тех пор, пока не установится, в основном, постоянный эффективный коэффициент трения (µe=FB/FNw) тормозного блока. Это особенно предпочтительно, поскольку при монтаже подъемной установки на тормозной направляющей могут осаждаться грязь и строительная пыль. Это влияет на коэффициент трения и тем самым на результирующее тормозное усилие. Описанный способ позволяет стереть эту грязь, а результат очистки можно проверить путем контроля коэффициента трения. В то же время можно проверить, соответствует ли измеренный коэффициент трения эмпирическому значению. Это обеспечивает грубую оценку применяемого материала, например, в отношении того, применен ли нужный материал тормозной направляющей.
Весьма предпочтительный вариант предусматривает, что определение эффективного коэффициента трения (µe) тормозного блока осуществляют на незагруженной кабине. Это представляет экономический интерес потому, что для контроля тормозного механизма не приходится использовать дополнительный груз. Отпадает потребность во времени на транспортировку контрольных грузов, и не возникает риск повреждения отделки кабины.
Один предпочтительный вариант предусматривает, что с помощью эффективного коэффициента трения (µe) и полученного посредством устройства измерения нормального усилия максимального тормозного подводящего усилия (FNm) подтверждают достаточный коэффициент надежности торможения (SB). Коэффициент надежности является параметром надежности механизма или надежностью выполнения задачи механизма. У тормозного механизма такой коэффициент надежности торможения особенно важен.
Особенно предпочтительно подобный способ контроля тормозного механизма подъемной установки применяется согласно вышеприведенным рассуждениям для пуска подъемной установки с подобным тормозным механизмом. Подъемная установка содержит кабину для транспортировки груза, противовес, соединенный тяговыми канатами с кабиной, и привод для приведения в движение кабины, противовеса и тяговых канатов, причем противовес и кабина движутся, в основном, в вертикальной шахте навстречу друг другу. У подобной подъемной установки оценить тормозной механизм особенно трудно, поскольку участвует комплексная система масс. Предложенный способ контроля дает эффективную и надежную возможность пуска подъемной установки.
Подъемная установка является комплексной системой масс, а тормозной механизм должен отвечать этой комплексной системе масс. Как правило, т.е. в нормальных рабочих состояниях, тормозной механизм подъемной установки должен останавливать всю систему масс или затормаживаемую общую массу (MG). В худшем случае (worst case), например при отказе тяговых канатов или несущих конструкций, тормозной механизм должен, однако, надежно тормозить и удерживать оставшуюся массу (MV), в основном, массу пустой кабины, включая дополнительный груз. Это последнее требование нельзя реально проверить в подъемной установке, поскольку для этого пришлось бы вызвать подобную ситуацию „worst case", называемую в области лифтостроения также «свободное падение».
Чтобы вследствие этого можно было обеспечить надежные данные о надежности тормозного механизма, а подобные данные являются составной частью пуска подъемной установки, участвующие массы должны быть известны. Изобретение предлагает предпочтительные варианты определения этих масс.
Первый вариант предусматривает, что затормаживаемую тормозным механизмом в ситуации „worst case" остаточную массу (MV) подъемной установки вычисляют путем ввода допустимого веса (MF) перевозимого груза и ввода веса (МК) пустой кабины (MV=МК+MF). Это просто реализовать, и это возможно в сильно стандартизированных подъемных установках, где недопустимы оформления на заказ.
Другой вариант предусматривает, что затормаживаемую тормозным механизмом в ситуации „worst case" остаточную массу (MV) подъемной установки вычисляют путем ввода допустимого веса (МР) перевозимого груза, активной массовой доли (МА) привода и измерения ускорения (ak), причем определение масс на подъемной установке, таких как фактический дебаланс (MB) подъемной установки или фактический вес (МТ) тяговых канатов, осуществляют с использованием устройства измерения тормозного усилия. Этот вариант является предпочтительным, если речь идет о подъемных установках на заказ, в которых устанавливаются, например, дополнительное оборудование, такое как дисплеи, кондиционеры и т.п., или предметы отделки, такие как зеркала, декоративные материалы или напольное покрытие на заказ. Этот метод обеспечивает надежное определение затормаживаемых масс.
Активные массовые доли (МА) привода определены самим приводом. Речь идет при этом об инерционных массах привода, включая соответствующие канатоведущие шкивы и огибные блоки. Эти вращательные инерционные массы в соответствии с диаметром канатоведущего шкива пересчитаны на эквивалентную линейную массовую долю (МА) привода. Эти значения приведены в документации на установку или приложены в виде таблиц данных к контрольному прибору.
Фактический дебаланс (MB) означает разность масс противовеса и пустой кабины. Как правило, эта разность масс рассчитана на 50% допустимого перевозимого груза (MF). Известны и другие расчеты этого дебаланса. Этот дебаланс можно вычислить путем определения сначала фактического веса (МТ) тяговых канатов. Это осуществляют предпочтительно путем измерения удерживающего усилия (FBHT) в исходном состоянии при стоящей в самом верхнем положении (НТ) кабине и измерения удерживающего усилия (FBHB) в исходном состоянии при стоящей в самом нижнем положении (НТ) кабине. Измерение удерживающих усилий (FBHT, FBHB) осуществляют за счет замедления кабины в соответствующем положении (самом верхнем или самом нижнем) только тормозным механизмом и удерживающее усилие измеряют посредством устройства измерения тормозного усилия. Фактический вес тяговых канатов можно определить по разности этих двух измерений по следующей формуле:
масса (МТ) тяговых канатов = (удерживающее усилие (FBHT) - (удерживающее усилие (FBHB))/2/g,
где g обозначает земное ускорение (9,81 м/с2).
Фактический дебаланс (MB) можно определить, например, по сумме этих двух измерений по следующей формуле:
масса (MB) дебаланса = (удерживающее усилие (FBHT) + (удерживающее усилие (FBHB))/2/g,
где g также обозначает земное ускорение (9,81 м/с2). При этом определении следует учитывать вес (MZ) возможного дополнительного груза в кабине (например, монтажник).
Вес (МК) пустой кабины можно определить путем измерения, например, посредством датчика ускорения собственного ускорения (ak) кабины. При этом пустую кабину останавливают в самом низком положении (НВ), затем размыкают тормозной механизм, в результате чего пустая кабина самопроизвольно ускоряется вверх. Это ускорение (ak) и возможное остаточное тормозное усилие (FBR) измеряют, после чего тормоз снова замыкают.
Фактический вес (МК) пустой кабины можно определить, например, используя названные полученные или известные значения, по следующей формуле:
МК=((MB-MT-MZ)*g-(MT+MZ+MA+MB)*ak-FBR)/ak
Затормаживаемую тормозным механизмом в ситуации „worst case" остаточную массу (MV) можно вычислить следующим образом:
MV=МК+MF
Этот метод обеспечивает надежное определение фактических массовых долей подъемной установки.
Предпочтительным образом максимально необходимое тормозное подводящее усилие (FNe) определяют с учетом затормаживаемой в ситуации „worst case" общей массы (MV), эффективного коэффициента трения (µе) тормозного блока, числа (N) тормозных блоков, необходимого минимального замедления (ake) и поправочного коэффициента (КВ1), причем поправочный коэффициент (КВ1) учитывает характеристические эмпирические значения, такие как скорость торможения, загрязнение или ожидаемая перегрузка:
FNe=KB1*MG*(ake+g)/(N*µe)
Это обеспечивает эффективный прогноз необходимого подводящего усилия (FNe) при небольших затратах. Необходимые измерения могут быть проведены одним лицом, и не требуется никаких тестовых грузов.
Другой вариант предусматривает, что тормозной блок подводят с максимальным усилием, посредством устройства измерения нормального усилия измеряют достигаемое, таким образом, максимальное тормозное подводящее усилие (FNm), это максимальное тормозное подводящее усилие (FNm) сравнивают с максимально необходимым тормозным подводящим усилием (FNe) и достаточную тормозную функцию считают подтвержденной, если максимальное тормозное подводящее усилие (FNm) на коэффициент надежности (SB) больше, чем максимально необходимое тормозное подводящее усилие (FNe). Этот вариант обеспечивает данные о действительно имеющейся надежности тормозного механизма. Это дает очень надежный тормозной механизм.
В качестве альтернативы тормозной блок подводят с максимальным усилием, посредством устройства измерения нормального усилия измеряют достигаемое, таким образом, максимальное тормозное подводящее усилие (FNm) и с учетом эффективного коэффициента трения (µe) тормозного блока, числа (N) тормозных блоков и поправочного коэффициента (КВ2), причем поправочный коэффициент (КВ2) учитывает характеристические эмпирические значения, такие как скорость торможения или загрязнение, определяют максимально возможное тормозное усилие:
FBm=KB2*2*FNm*N*µe
Это обеспечивает непосредственные данные о максимально возможной эффективности торможения тормозного механизма, использованного в определенной подъемной установке.
Предпочтительным образом на основе предшествующих данных о максимально возможном тормозном усилии (FBm) максимально необходимое тормозное усилие (FBe) определяют с учетом затормаживаемой в ситуации „worst case" массы (MV), необходимого минимального замедления (ake) и поправочного коэффициента (КВ2'):
FBe=KB2′*MV*(ake+g)
Поправочный коэффициент (КВ2′) учитывает характеристические эмпирические значения, такие как ожидаемая перегрузка. Максимально возможное тормозное усилие (FBm) сравнивают с максимально необходимым тормозным усилием (FBe) и достаточную тормозную функцию считают подтвержденной, если максимально возможное тормозное усилие (FBm) на коэффициент надежности (SB) больше, чем максимально необходимое тормозное усилие (FBe).
Этот метод дает широкое представление о надежности торможения подъемной установки.
В одном предпочтительном варианте способа пуска подъемной установки тормозную функцию верифицируют за счет контролируемого или неконтролируемого ускорения пустой кабины, преимущественно в направлении вверх, пока система контроля кривых или скорости не активирует тормозной механизм и пока тормозной механизм посредством соответствующего тормозного блока (блоков) не затормозит кабину до остановки и не будет удерживать ее в остановленном состоянии. В процессе торможения измеряют тормозные подводящие усилия и тормозные усилия и полученный из этих измерений коэффициент трения (µb) тормозного блока сравнивают с предварительно полученным эффективным коэффициентом трения (µе) тормозного блока. Пуск тормозного механизма считают выполненным, если полученный коэффициент трения (µb), в основном, совпадает с эффективным коэффициентом трения (µe), во всяком случае, с учетом поправочного коэффициента (КВ1, КВ2). Преимущество этого варианта следует усматривать в том, что общая функция системы безопасности подъемной установки может быть осуществлена простыми средствами только одним лицом.
Другой предпочтительный вариант способа пуска предусматривает, что корректную балансировку подъемной установки производят или верифицируют с использованием устройства измерения тормозного усилия. Это рентабельно, поскольку не требуется никаких отдельных измерительных приборов.
Предпочтительным образом балансировку подъемной установки производят путем ввода в блок обработки необходимого балансировочного коэффициента. Фактический дебаланс (MB) может быть определен с использованием устройства измерения тормозного усилия, как это описано выше. Фактический балансировочный коэффициент (Bw) определяют путем соотнесения фактического дебаланса (MB) с допустимой дополнительной нагрузкой (MF) кабины. Простым образом необходимый дополнительный вес определяют как разность между требуемым (Bg) и фактическим (Bw) балансировочными коэффициентами и путем умножения на допустимую дополнительную нагрузку, а противовес может быть утяжелен этим дополнительным весом или соответственно разгружен при отрицательном результате. Преимущество этого варианта в том, что балансировку можно просто, надежно и эффективно контролировать и/или корректировать.
Предпочтительным образом число используемых тормозных блоков составляет два или кратное двум. Это предпочтительно, поскольку, как правило, имеются две тормозные направляющие, и тем самым тормозные блоки могут быть симметрично распределены по тормозным направляющим. Можно также вместо больших тормозных блоков использовать несколько небольших тормозных блоков. Это рентабельно, поскольку модульные тормозные механизмы могут быть объединены в систему.
Предпочтительным образом в рамках пуска зарегистрированные параметры тормозного блока проверяют на совпадение с заданными значениями. В целях контроля функции при нормальной работе эти пусковые значения или полученные при пуске параметры записывают в память, а устройство текущего контроля состояния оценивает параметры при каждом срабатывании тормозного механизма при нормальной работе. Устройство контроля состояния непрерывно сравнивает полученные параметры с пусковыми значениями, а при неожиданных отклонениях производят новую калибровку, уведомляют сервисную службу или посылают сообщение о сбое. Это гарантирует функционирование тормозного механизма в течение длительного времени и позволяет проводить целенаправленное обслуживание.
Предпочтительным образом в качестве параметра используют полученный эффективный коэффициент трения (µе). В качестве альтернативы или дополнительно в качестве параметра используют полученную характеристику нормального усилия, которая хранится в памяти в качестве функции устройства измерения подвода или пути подвода. Эти параметры являются базовыми величинами, которые обеспечивают надежные данные о тормозной способности и тем самым о состоянии надежности тормозного механизма и подъемной установки.
В одном предпочтительном варианте корректную функцию устройства измерения тормозного усилия проверяют путем сравнения измеренного тормозного усилия (FB) с необходимым для движения кабины приводным усилием (FA), причем для этой цели измеряют статическое тормозное усилие (FBst) при неподвижной кабине и динамическое тормозное усилие (FBdyn) при постоянной скорости движения и небольшом активном тормозном подводящем усилии (FBw), а разность этих двух измерений (FBdyn-Fbstat) сравнивают с необходимым приводным усилием (FA), например моментом (ТА) двигателя. Этот метод обеспечивает дополнительную или альтернативную оценку состояния надежности подъемной установки или измерительной системы.
Предпочтительным образом для осуществления способа пуска используют устройство, выполненное с возможностью подключения к тормозному механизму и управления процессом пуска. Это особенно предпочтительно, поскольку посредством этого устройства могут быть даны, например, указания осуществляющему способ лицу, автоматически проведены расчеты и записаны в память результаты пуска или выданы в виде отчета. Это происходит надежно и эффективно.
Другие подробности изобретения и его дополнительные преимущества более подробно поясняются в нижеследующей части описания.
Ниже изобретение более подробно поясняется на примерах его осуществления в связи со схематичными и не в масштабе чертежами. Одинаково действующие детали обозначены на чертежах одинаковыми ссылочными позициями. На чертежах изображают:
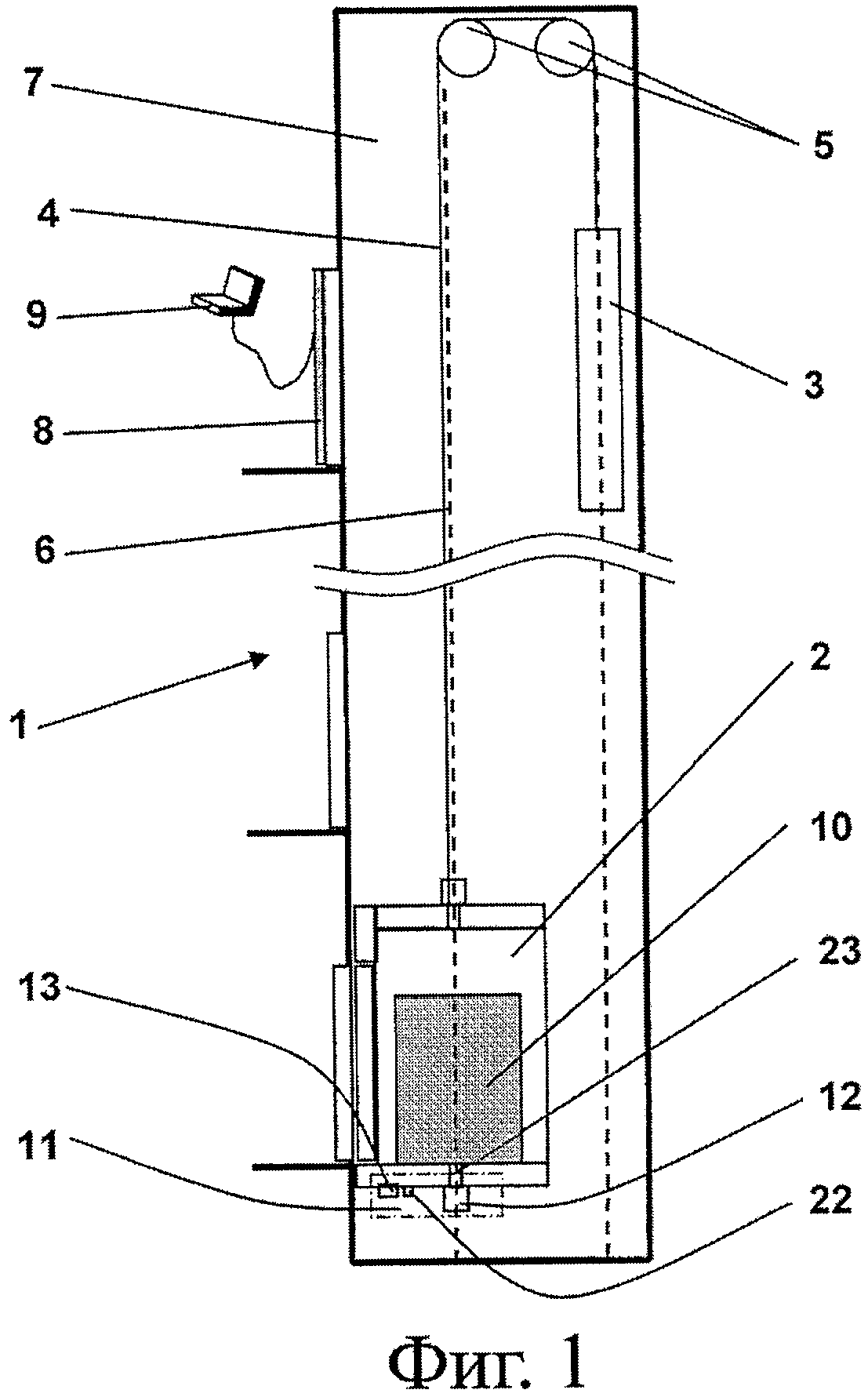
- фиг.1: общий вид подъемной установки с кабиной, противовесом и размещенным на кабине тормозным механизмом;
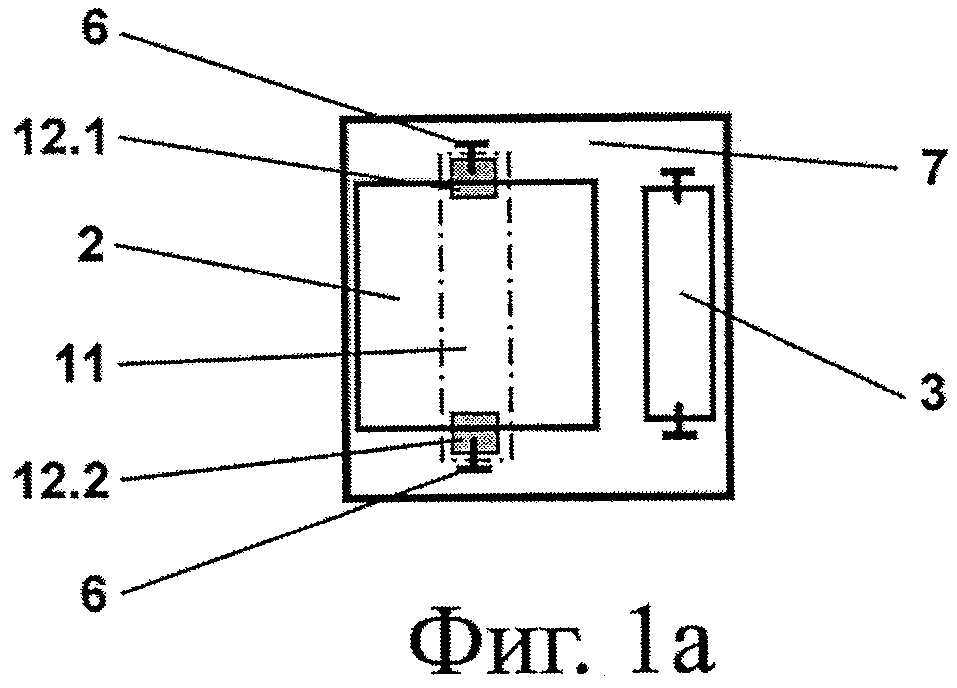
- фиг.1а: вид сверху кабины и противовесы подъемной установки согласно фиг.1;
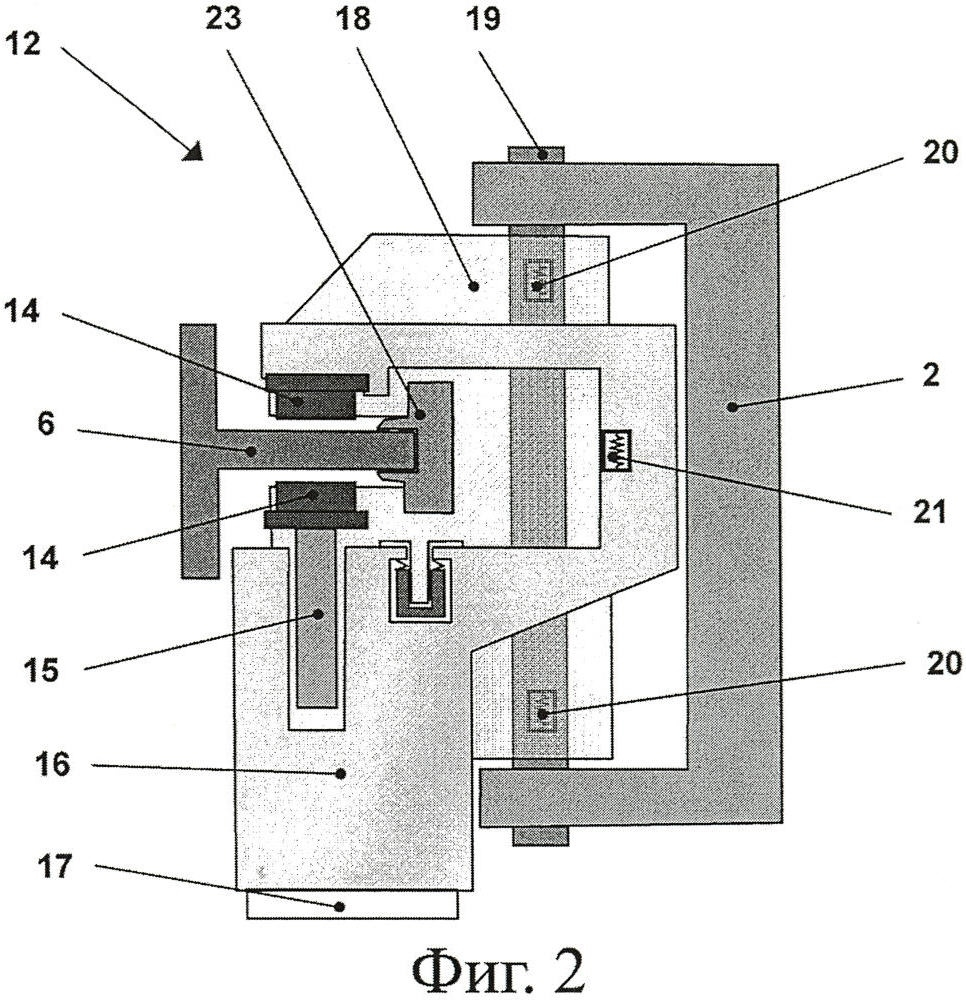
- фиг.2: подробный вид сверху тормозного блока;
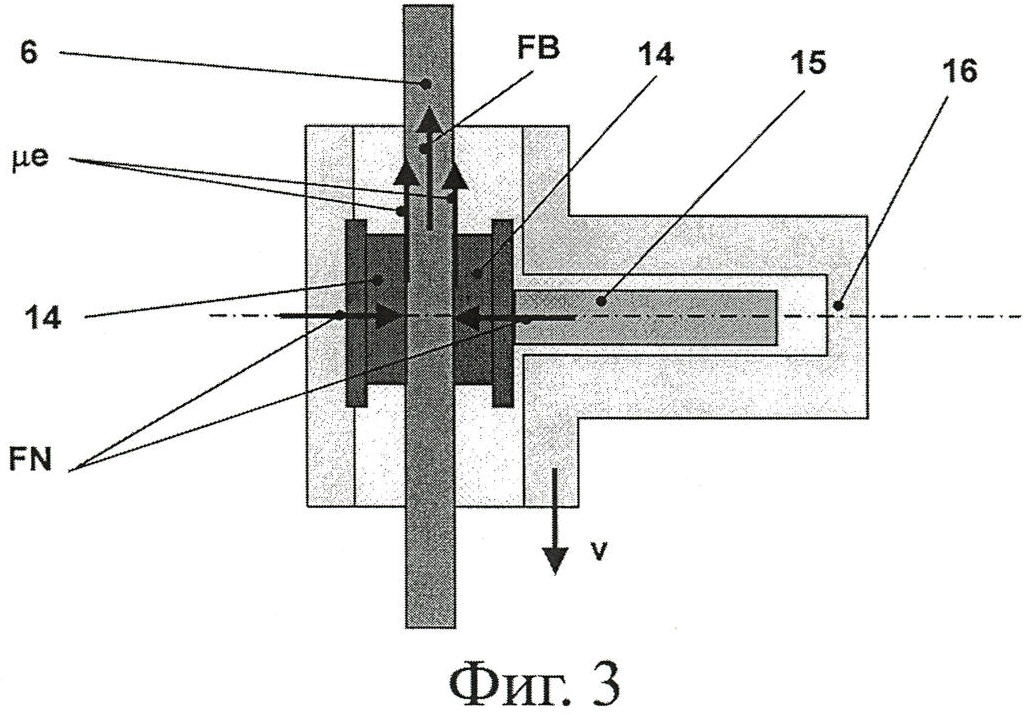
- фиг.3: подробный вид тормозного блока;
- фиг.4: схематично измерительное устройство;
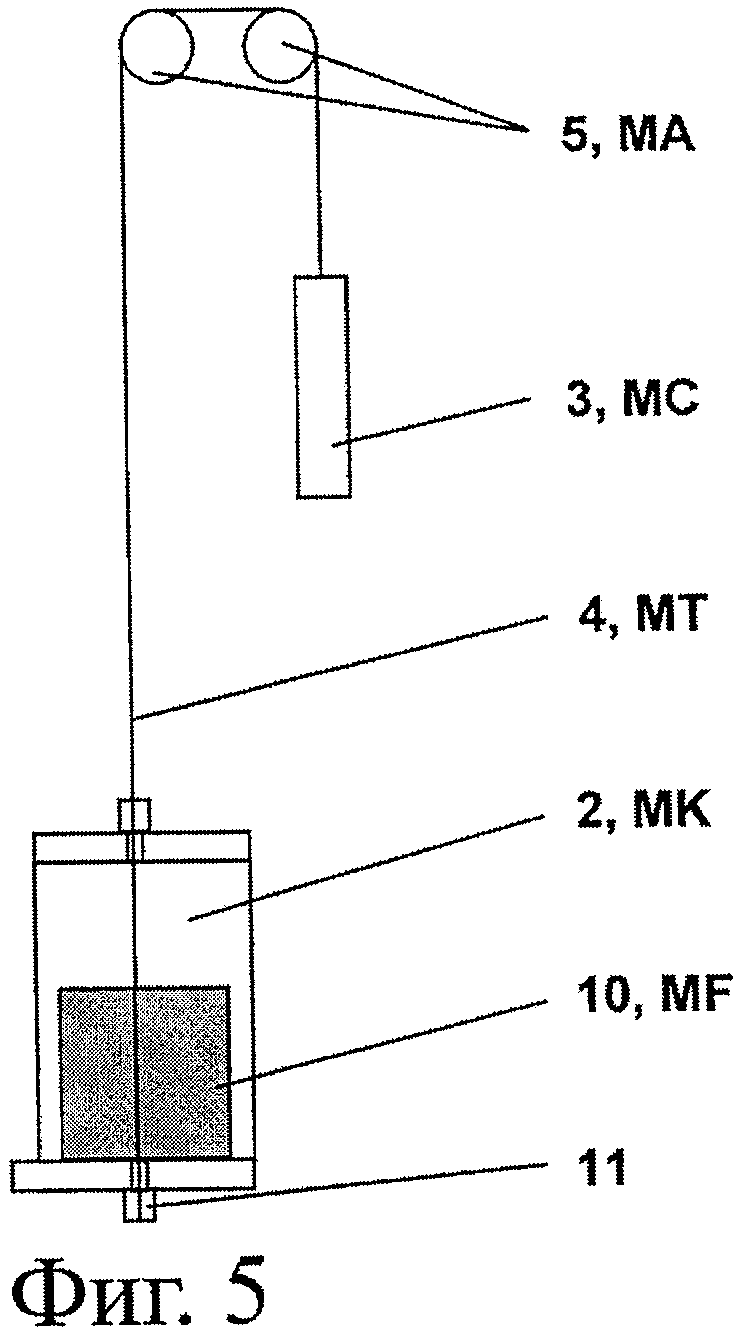
- фиг.5: общий вид распределения масс подъемной установки;
- фиг.6а: распределение масс подъемной установки с кабиной в самом нижнем положении;
- фиг.6b: распределение масс подъемной установки с кабиной в среднем положении;
- фиг.6с: распределение масс подъемной установки с кабиной в самом верхнем положении.
На фиг.1 изображен пример подъемной установки 1. Подъемная установка 1 содержит кабину 2, соединенную тяговыми канатами 4 с противовесом 3. Кабина 2 приводится в движение посредством тяговых канатов 4 приводом 5. Кабина 2 направляется, в основном, в вертикальном направлении в шахте 7 посредством направляющих башмаков 23. Кабина 2 и противовес 3 движутся в шахте 7 навстречу друг другу. Кабина 2 служит для перевозки груза 10. Подъемная установка 1 управляется устройством 8 управления. В изображенном примере кабина снабжена тормозным механизмом 11, который способен удерживать кабину 2 в остановленном состоянии и при необходимости затормозить ее из состояния движения до остановки. Удержание в остановленном состоянии требуется, например, когда кабина для приема или выгрузки перевозимого груза 10 стоит на этаже. Торможение может потребоваться, если обнаружен дефект подъемной установки и соответственно движение кабины следует быстро замедлить.
Тормозной механизм 11 содержит, по меньшей мере, один тормозной блок 12, который может быть приведен в контакт с тормозной направляющей 6. В изображенном на фиг.1 примере направляющий рельс и тормозная направляющая 6 являются одним и тем же элементом. Тормозной механизм 11 содержит далее блок 13 управления торможением, который управляет тормозным блоком 12. Блок 13 управления торможением задает тормозному блоку 12 значения торможения, который и устанавливает их. Далее в изображенном примере на кабине 2 установлен датчик 22 ускорения, который регистрирует актуальное состояние ускорения кабины 2 и передает его, по меньшей мере, блоку 13 управления торможением и/или устройству 8 управления подъемной установкой. На фиг.1 с устройством 8 управления связано устройство 9, которое управляет способом пуска подъемной установки 1. В изображенном примере этим устройством 9 является мобильный компьютер, такой как лэптоп, КПК и т.п. Это устройство 9 содержит необходимые стандартные обрабатывающие и управляющие программы для простого осуществления пуска подъемной установки 1 и тормозного механизма 11.
На фиг.1а изображенная на фиг.1 подъемная установка 1 показана в схематичном виде сверху на кабину 2. Кабина 2 направляется двумя направляющими рельсами или тормозными направляющими 6. Противовес 3 находится в той же шахте 7 и направляется собственными направляющими рельсами (не показаны). Тормозной механизм 11 установлен на кабине 2, причем в данном примере использованы два тормозных блока 12.1, 12.2, которые могут воздействовать на соответственно одну тормозную направляющую 6.
На фиг.2 и 3 изображен пример тормозного блока 12. Тормозной блок 12 содержит корпус 16 с неподвижной тормозной плитой 14 и подводящее устройство 15, содержащее вторую тормозную плиту 14. Тормозной блок 12 охватывает тормозную направляющую 6, и посредством подводящего устройства 15 тормозные плиты 14 могут быть подведены, чем может быть создано тормозное или удерживающее усилие. Управление и регулирование подвода осуществляют посредством контрольного устройства 17. Направляющий башмак 23 служит для ведения тормозного блока 12 и/или кабины 2. Посредством устройства 21 измерения нормального усилия измеряют созданное тормозным блоком 12 нормальное усилие FN. Нормальное усилие FN создает зависимое от коэффициента трения µe тормозное усилие FB. Для простоты изменяют единственное тормозное усилие FB на тормозной блок и по нему определяют коэффициент трения µе, соответствующий значению FN, деленному на FB, т.е. это отнесенный к тормозному блоку коэффициент трения. Приставной корпус 18 направляет в изображенном примере тормозное усилие FB от тормозных плит 14 через несущий штырь 19 к кабине 2. Тормозное усилие может быть измерено устройством 20 измерения тормозного усилия. Измеренные значения нормального усилия FN, тормозного усилия FB или пути подвода, который может быть измерен, например, в подводящем устройстве 15, регистрируют контрольным устройством 17 и подают непосредственно или через блок 13 управления торможением и/или устройство 8 управления подъемной установкой к пусковому устройству 9. Само собой, эти измеренные значения могут использоваться также контрольным устройством 17, блоком 13 управления торможением и/или устройством 8 управления подъемной установкой для выполнения их собственных задач.
При торможении тормозной блок 12 скользит со скоростью v вдоль тормозной направляющей 6, а при удержании эта скорость v равна нулю. Это выполнение обеспечивает эффективное регулирование тормозного механизма 11 при работе, поскольку блок 13 управления торможением может задавать желаемое нормальное усилие FN любому тормозному блоку 12, а тормозной блок 12 самостоятельно устанавливает это значение. При пуске эти значения могут быть использованы просто для расчета эффективной надежности торможения SB.
На фиг.4 схематично изображено возможное измерительное устройство для осуществления способа пуска. Привод 5 снабжен устройством для регистрации приводного момента ТА. Привод подает этот измерительный сигнал к устройству 8 управления подъемной установкой. Кабина 2 оборудована датчиком 22 ускорения. Сигнал датчика 22 ускорения подают через кабину также к устройству 8 управления подъемной установкой. Кабина 2 содержит тормозной механизм 11, состоящий из нескольких тормозных блоков 12. Каждый из тормозных блоков 12 снабжен устройством 21 измерения нормального усилия, устройством 20 измерения тормозного усилия и в данном примере устройством измерения эффективного пути подвода подводящего устройства 15. Измеренные значения через тормозной блок также подают к устройству 8 управления подъемной установкой или измерительные сигналы подают через устройство 8 управления к устройству 9 для управления пуском. Устройство 9 для управления пуска подключено к устройству 8 управления подъемной установкой. Это обеспечивает управление устройством с этажа. Разумеется, устройство может быть подключено к другим точкам сбора данных, например к блоку 13 управления торможением или тормозному механизму 11. Устройство управления пуска 9 управляет процессом пуска и дает необходимые указания обслуживающему персоналу.
Фиг.5 дает представление о главных массах подъемной установки. Кабина 2 порожней массы МК соединена с противовесом 3 посредством тягового каната 4 массой МТ. Противовес 3 имеет массу МС. Привод 5, приводящий в движение через тяговый канат 4 кабину 2 и противовес 3, имеет массовый эквивалент МА, соответствующий вращательной массе приводных компонентов привода 5. Кабина 2 загружена максимально допустимым перевозимым грузом 10, соответствующим массе MF. Кабина 2 оборудована тормозным механизмом 11.
Фиг.6а-6с дают представление о возможных измерительных точках для пуска тормозного механизма 11 и подъемной установки 1. Кабина незагружена, т.е. актуальная масса MF равна нулю. Фиг.6а-6с следует рассматривать в сочетании с фиг.5.
На фиг.6а измерительная точка изображена в самом нижнем положении НВ. При этом массовая доля МТ тягового каната 4 находится, в основном, на стороне кабины 2. Измерение FB соответствует избыточной массе противовеса 3 по отношению к пустой кабине 2 и тяговому канату 4.
На фиг.6b измерительная точка изображена в среднем положении НМ. Кабина 2 и противовес 3 расположены на одной высоте, а массовая доля МТ тягового каната 4, в основном, равномерно распределена по стороне кабины 2 и противовеса 3. Измерение FB соответствует избыточной массе только противовеса 3 по отношению к пустой кабине 2.
На фиг.6с измерительная точка изображена в самом верхнем положении НТ. При этом массовая доля МТ тягового каната 4 находится, в основном, на стороне противовеса 3. Измерение FB соответствует избыточной массе противовеса 3 и тягового каната 4 по отношению к пустой кабине 2. Измерительная точка на фиг.6b может быть определена, само собой, как среднее значение измеренных значений на фиг.6а и 6с.
Зная настоящее изобретение, специалист в области подъемных установок может произвольно изменять установленные формы и расположения. Например, показанное расположение привода в оголовке шахты может быть заменено расположением привода на кабине или противовесе, или тормозной механизм может быть расположен на верхнем конце кабины, или под и над кабиной, или же сбоку кабины.
Реферат
Изобретение относится к подъемным установкам и направлено на усовершенствование средств, осуществляющих их пуск и торможение. У предложенной подъемной установки тормозной механизм (11) тормозит и удерживает кабину (2). Тормозной механизм (11) состоит из определенного числа тормозных блоков (12), которые в случае необходимости приводят в контакт с тормозными направляющими (6), причем тормозной блок (12) выполнен для этой цели с возможностью прижатия, по меньшей мере, одной тормозной плиты (14) к тормозной направляющей (6) и создания тормозного усилия (FB). Согласно изобретению для контроля тормозного механизма (11) определяют эффективный коэффициент трения (µе) тормозного блока, созданный при прижатии тормозной плиты (14) к тормозной направляющей. Устройство для осуществления пуска связано с устройством управления пуском и с возможностью подключения к тормозному механизму. 3 н. и 20 з.п. ф-лы, 6 ил.
Формула
FNe=KB1·MG·(ake+g)/(N·µе).
FBm=KB2·2·FNm·N·µe.
FBe=KB2′·MV·(ake+g),
при этом максимально возможное тормозное усилие (FBm) сравнивают с максимально необходимым тормозным усилием (FBe) и достаточную тормозную функцию считают подтвержденной, если максимально возможное тормозное усилие (FBm) на коэффициент надежности (SB) больше, чем максимально необходимое тормозное усилие (FBe).
Комментарии