Система и способ управления движением лифта - RU2179143C2
Код документа: RU2179143C2
Чертежи
Описание
Данное изобретение относится к гидравлическим лифтам, и более конкретно к системам управления движением таких лифтов.
Гидравлические лифты обычно используются вместо лифтов с канатоведущим шкивом для обеспечения подъема на сравнительно небольшую высоту. Преимуществом гидравлических лифтов является их меньшая стоимость. Однако это преимущество может быть сведено на нет отсутствием точного управления движением, имеющегося в лифтах с канатоведущим шкивом.
В обычном гидравлическом лифте движение жидкости в гидравлический цилиндр и из него вызывает движение кабины лифта вверх и вниз в лифтовой шахте. Во время движения кабины вверх жидкость перекачивается насосом из резервуара, проходит через управляющий клапан и затем поступает в цилиндр. Во время движения кабины вниз управляющий клапан открывается, в результате чего жидкость вытекает из цилиндра и поступает в резервуар под действием веса кабины. Движение кабины лифта состоит из фазы разгона, фазы движения на полной скорости, фазы торможения и фазы выравнивания. Во время фазы выравнивания положение кабины корректируется для выравнивания ее с уровнем площадки. Фаза выравнивания увеличивает время движения и объем работы, которая должна выполняться гидравлической системой, и поэтому желательно ее уменьшить.
Один из типов гидравлических клапанов, обычно используемых для перехода от полной скорости к останову (фаза торможения кабины лифта), содержит шток, приводимый в движение соленоидом для направления жидкости через клапан. В данном типе клапана соленоид срабатывает для того, чтобы направить поток жидкости в цилиндр, закрытый поршнем. При достаточном давлении в цилиндре поршень открывается, жидкость проходит через клапан, и кабина лифта опускается. Уравнивая давление жидкости по обеим сторонам клапана до его открытия, можно обеспечить мягкое начало спуска кабины. Недостатком данного типа клапанов является то, что фаза торможения изменяется в зависимости от вязкости гидравлической жидкости и от статического давления в гидравлической системе (или нагрузки на гидравлический цилиндр). Такое изменение увеличивает фазу необходимого выравнивания, и в результате увеличивает время движения, потери энергии и риск перегрева гидравлической системы.
Другой тип клапана, управляющего переходными процессами, содержит шток клапана, приводимый в движение электрическим двигателем. В этом типе клапана поток управляется с помощью шагового двигателя, который перемещает клапан управления потоком. Величина потока программируется и управляется с использованием обратной связи для обеспечения требуемого профиля скорости для кабины лифта. Задачей двигателя-привода управляющего клапана является обеспечение более точного управления движением кабины лифта и, таким образом, большего удобства для пассажиров лифта (мягкое движение кабины), которое приближается к удобству пользования лифтом с канатоведущим шкивом. Основным недостатком управляющего клапана, приводимым с помощью двигателя, является дополнительная сложность и связанное с этим увеличение стоимости.
Обратная связь для управления профилем скорости может быть с открытым или замкнутым контуром. При управлении с открытым контуром обратной связи контролируются температура гидравлической жидкости и статическое давление, которые используются для определения задержки при выполнении фазы торможения в профиле скорости. Таким образом, управляющая система пытается компенсировать изменения вязкости гидравлической жидкости. Поскольку такие задержки определяются в зависимости от заранее определенных величин, зависящих от таких параметров, как вязкость, эффективность функционирования системы управления при управлении фазой торможения далека от оптимальной. При использовании обратной связи с замкнутым контуром для управления клапаном с приводом от двигателя, в которой используется скорость кабины лифта, высокая эффективность может быть достигнута за счет постоянного регулирования положения клапана для аппроксимации требуемого профиля скорости. Однако сложность системы управления и повышенная стоимость соответствующего оборудования затрудняют использование такой системы.
Заявка на патент Великобритании GB 2201810 раскрывает систему управления на основе микропроцессора, в которой используется заранее заданное расстояние торможения для определения начала фазы торможения. Расстояние торможения затем может корректироваться в зависимости от изменений времени выравнивания или ошибок выравнивания по расстоянию.
Учитывая недостатки предшествующего уровня техники, существует потребность в системе управления, обеспечивающей движение лифтов таким образом, чтобы оптимизировать время движения и эффективность без существенного увеличения стоимости.
В соответствии с настоящим изобретением вышеназванная задача решается в системе и способе управления движением гидравлического лифта с вычислением пути торможения в зависимости от скорости лифта и заданного времени для фазы торможения.
Предложенная система управления содержит управляющий гидравлический клапан, средство включения этого клапана при достижении кабиной лифта расстояния от площадки, равного пути торможения, содержащее средство вычисления пути торможения в зависимости от измеренной скорости и заданной величины интервала времени для фазы торможения и средство определения положения кабины лифта и измерения ее скорости кабины.
Отличием предложенной системы управления является то, что средство включения управляющего гидравлического клапана включает в себя контроллер выработки команды торможения в зависимости от заданного расстояния кабины до площадки, выполненное в виде контроллера. При этом средство вычисления пути торможения в зависимости от измеренной скорости и заданной величины интервала времени для фазы торможения содержит блок интерфейса, выполненный с возможностью вычисления времени задержки подачи команды на торможение в зависимости от разницы между вычисленной величиной пути торможения и заданным расстоянием от кабины лифта до площадки для включения упомянутого гидравлического клапана по истечении этого времени задержки и связанный со средством определения положения кабины лифта и измерения ее скорости кабины лифта, при этом блок интерфейса установлен между гидравлическим клапаном и контроллером.
В частном варианте вышеописанной системы управления средство определения положения кабины лифта и измерения скорости кабины лифта может представлять собой систему кодирования расстояния, состоящую из ленты и считывающего устройства, установленных с возможностью взаимодействия друг с другом. При этом лента может быть выполнена перфорированной и размещена в зоне соответствующей площадки остановки лифта.
В другом частном варианте вышеописанной системы управления средство определения положения кабины лифта может включать в себя пусковое устройство, размещенное в шахте лифта на указанном заданном расстоянии от площадки с возможностью направления сигнала в контроллер на выдачу команды торможения, а средство измерения скорости кабины лифта может включать в себя вращающийся датчик положения.
Управляющий гидравлический клапан может содержать золотниковый клапан управления лифтом на переходных режимах, имеющий привод от двигателя.
Предложенный способ управления движением лифта при подходе кабины лифта к площадке предусматривает использование системы управления с управляющим гидравлическим клапаном, включением которого по команде торможения определяют начало фазы торможения кабины лифта при ее движении к площадке. Согласно способу осуществляют определение положения кабины лифта по отношению к площадке, измерение скорости кабины лифта и включение управляющего гидравлического клапана в зависимости от пути торможения, который определяют в зависимости от измеренной скорости и заданного интервала времени для фазы торможения.
Отличием предложенного способа является то, что предварительно задают расстояние от кабины лифта до площадки, по достижении лифтом этого расстояния выдают команду торможения, определяют время задержки подачи команды торможения на управляющий гидравлический клапан в зависимости от разницы между вычисленной величиной пути торможения и заданным расстоянием от кабины лифта до площадки и включают управляющий гидравлический клапан по истечении времени задержки.
В частном случае осуществления способа время задержки можно определять посредством блока интерфейса, который подключается между контроллером, подающим команду торможения в зависимости от заданного расстояния кабины лифты до площадки, и управляющим гидравлическим клапаном. К такому блоку интерфейса можно дополнительно подключить средства измерения скорости кабины лифта и средства определения положения кабины лифта.
В другом частном случае положение кабины лифта можно определять посредством пускового устройства, размещенного в шахте лифта на заданном расстоянии от площадки, при этом команда торможения будет подаваться посредством контроллера при достижении кабиной лифта пускового устройства.
Достоинствами изобретения являются простота системы управления и минимальное время выравнивания, что является результатом вычисления пути торможения в зависимости от скорости лифта. Использование скорости в качестве определяющего фактора учитывает изменения давления, вязкости и скорости движения жидкости, что устраняет необходимость выдерживать заданный профиль скорости лифта с использованием сложной системы управления с обратной связью. Минимизация времени выравнивания приводит в результате к минимизации потерь энергии, которые имеют место в процессе выравнивания и уменьшает риск перегрева гидравлической жидкости.
Изобретение дает возможность усовершенствования системы управления путем подключения блока интерфейса между контроллером и управляющим гидравлическим клапаном. Блок интерфейса вычисляет путь торможения и задержку и включает гидравлический клапан по истечении времени задержки после того, как контроллер выработает команду торможения.
Использование отдельного блока интерфейса облегчает усовершенствование существующего контроллера для использования системы управления в соответствии с изобретением. Блок интерфейса принимает стандартную команду торможения из существующего контроллера, вычисляет задержку и затем включает гидравлический клапан для начала фазы торможения. Эффективность работы существующих лифтов может быть легко и без больших затрат улучшена за счет использования блока интерфейса.
Вышеуказанные и другие задачи, признаки и достоинства настоящего изобретения становятся более очевидными после ознакомления с нижеследующим подробным описанием примера реализации изобретения, иллюстрированного прилагаемыми схемами.
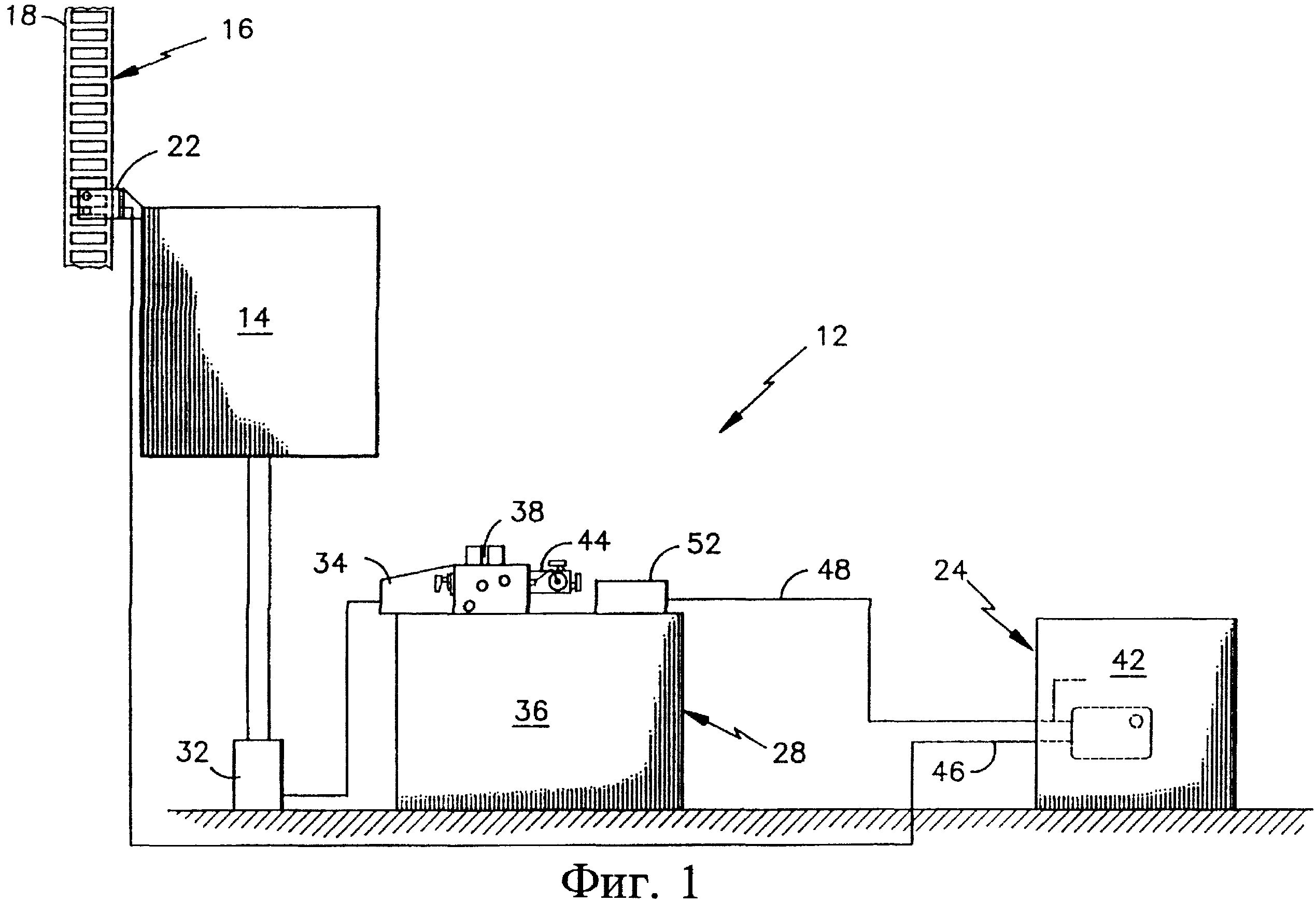
Фиг. 1. Схема системы управления лифта.
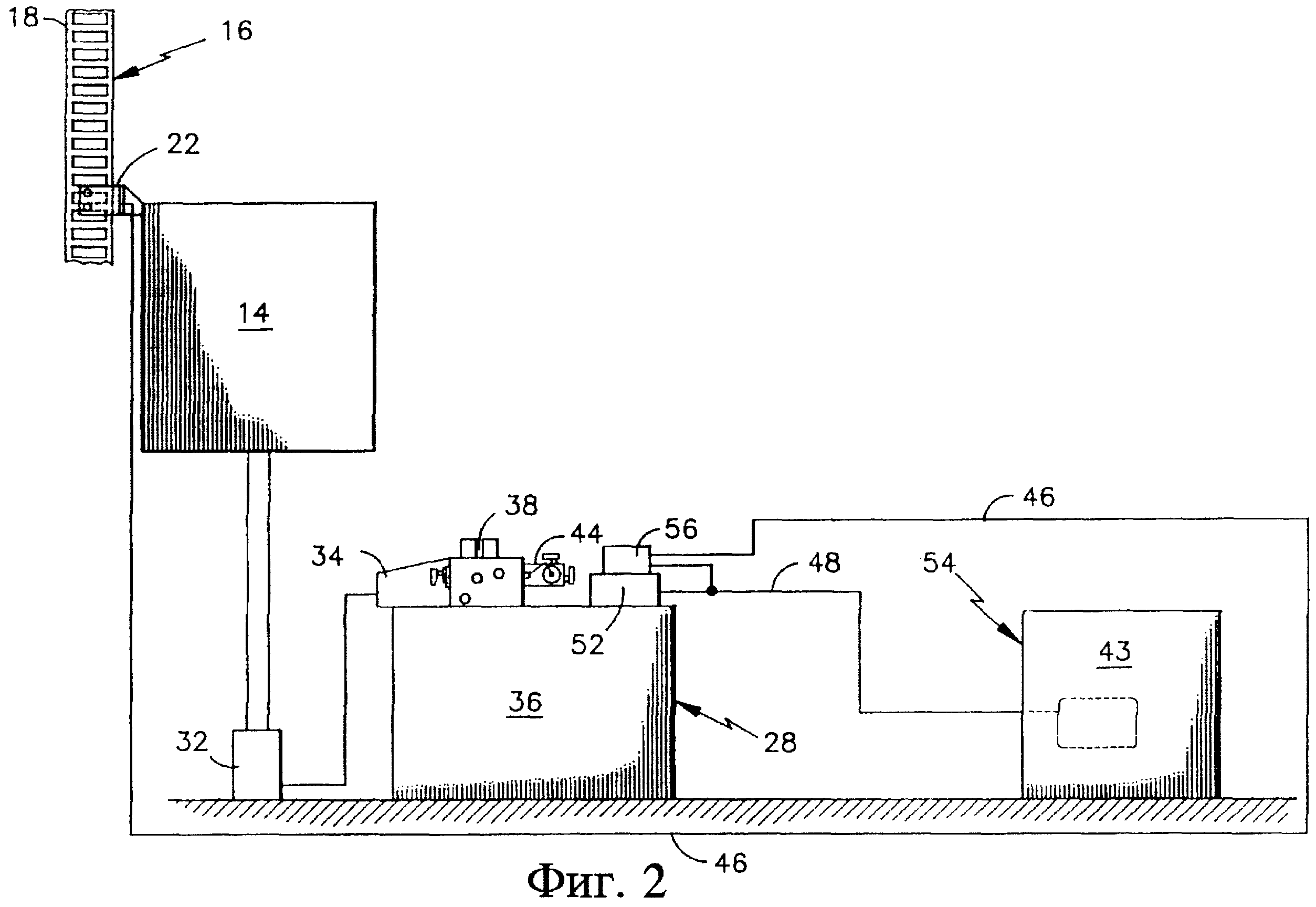
Фиг. 2. Вариант выполнения изобретения с системой управления, содержащей блок интерфейса.
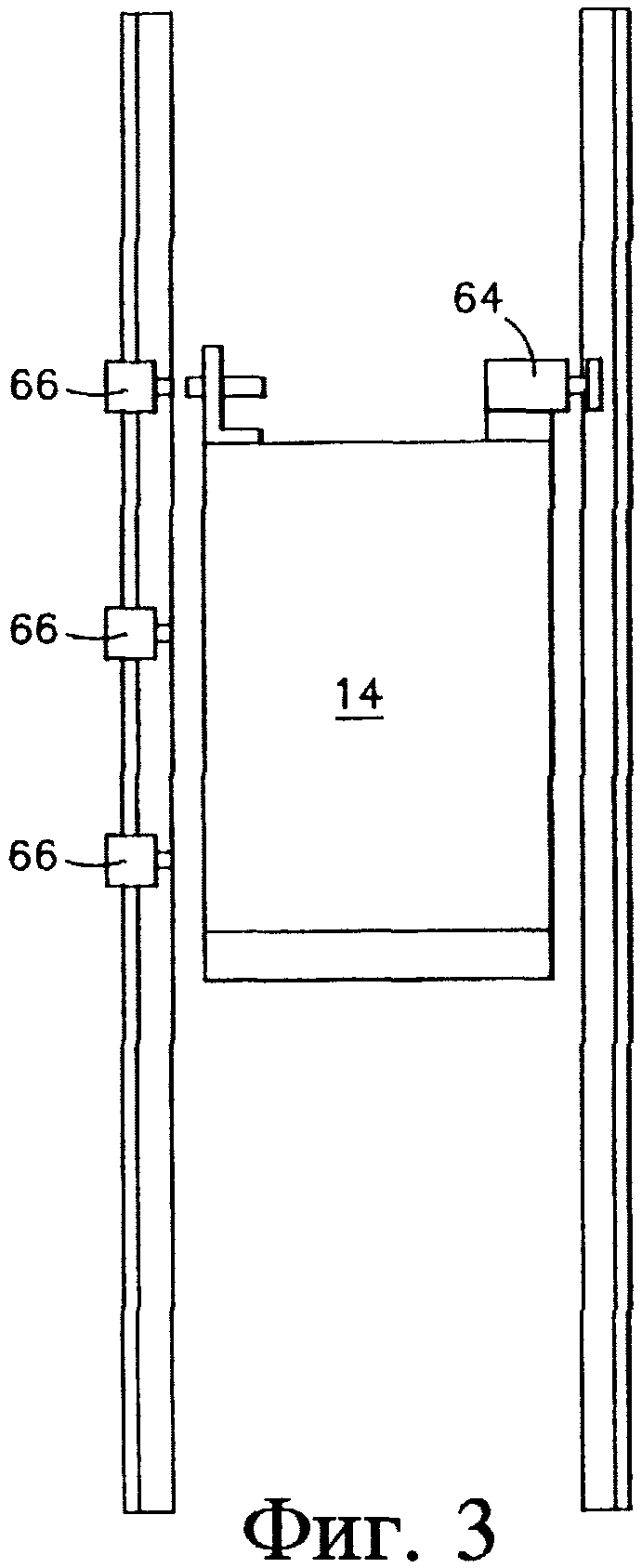
Фиг. 3. Система кодирования расстояния, содержащая множество сегментированных, перфорированных лент и считывающее устройство.
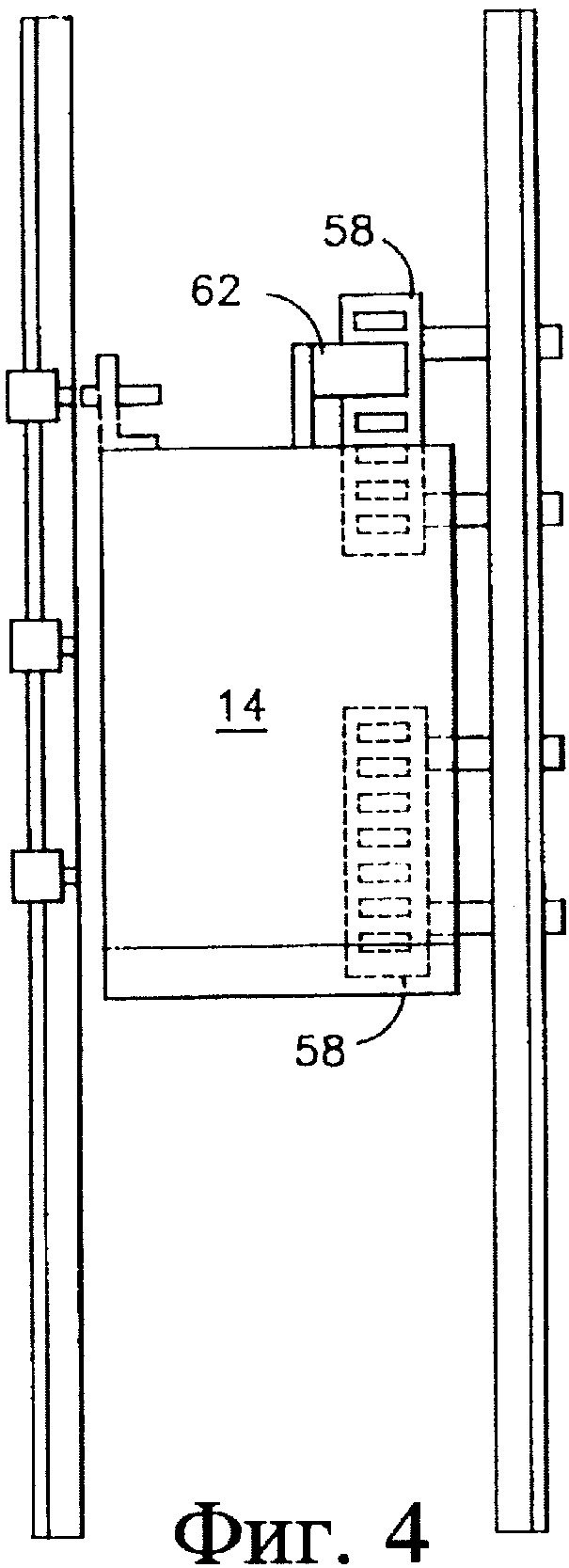
Фиг. 4. Вращающийся датчик положения и пусковое устройство.
На фиг. 1 показана система гидравлического лифта 12, в том числе кабина 14, система кодирования расстояния 16, содержащая ленту 18 и считывающее устройство (устройство считывания с ленты) 22, и система управления 24. Кабина 14 - это кабина обычного лифта, которая движется в лифтовой шахте (не показана). Лента 18 - это перфорированная лента, которая проходит по всей длине шахты лифта. Считывающее устройство 22 размещается на кабине 14 и взаимодействует с лентой 18. Взаимодействие между лентой 18 и считывающим устройством 22 обеспечивает измерение скорости кабины и определение положения кабины 14 относительно площадок, расположенных в определенных местах шахты лифта. Измерение скорости кабины может осуществляться считывающим устройством 22, например, путем дифференцирования разности положений кабины лифта по времени. При использовании перфорированной ленты 18, скорость кабины лифта при постоянном шаге перфорации можно определять умножением частоты прохождения отверстий под считывающим устройством на некоторую константу.
Система управления 24 содержит гидравлическую систему 28, в состав которой входит цилиндр 32, насос 34, резервуар 36, управляющий гидравлический клапан 38 и контроллер 42. Цилиндр 32, насос 34 и резервуар 36 - это обычные средства, обеспечивающие движение кабины лифта 14 в шахте лифта. Насос 34 перемещает гидравлическую жидкость в и из цилиндра 32, в результате чего кабина лифта 14 движется вверх и вниз в шахте лифта.
Гидравлический клапан 38 управляет движением гидравлической жидкости в и из цилиндра 32, определяя, таким образом, профиль скорости кабины лифта 14. Обычный гидравлический клапан 38 выполняет несколько функций, одна из которых заключается в управлении движением кабины 14 на переходном режиме от состояния останова (нулевой скорости) до достижения полной скорости, то есть фаза разгона, и в управлении движением кабины 14 на переходном режиме от полной скорости до скорости начала выравнивания, то есть фаза торможения. Эта функция выполняется золотниковым клапаном 44, управляющим переходными процессами и имеющим привод в виде двигателя. Золотниковый клапан 44 встроен в гидравлический клапан 38. Перемещение клапана 44 в первом направлении вызывает начало фазы разгона. Перемещение клапана 44 во втором направлении вызывает начало фазы торможения.
Контроллер 42 содержит средство вычисления пути торможения в зависимости от скорости кабины 14. Контроллер 42 связан с устройством 22 считывания с ленты (считывающим устройством) с помощью соединительного кабеля 46. Параметры скорости, поступающие в контроллер 42 из считывающего устройства 22, используются для определения расстояния, необходимого для торможения кабины 14 до скорости выравнивания в течение заданного интервала времени. Интервал времени выбирается таким образом, чтобы обеспечить комфортное для пассажиров лифта торможение. Путь торможения непрерывно обновляется по мере движения кабины 14. Параметры положения, поступающие в контроллер 42 из считывающего устройства 22, используются в сочетании с расстояниями между площадками, записанными в контроллере 42, для определения момента, когда кабина 14 в своем движении достигает точки, в которой расстояние до площадки, у которой необходимо остановиться, равно вычисленному пути торможения. В этой точке контроллер 42 посылает сигнал управления клапаном 44 управления переходными процессами по второму коммуникационному кабелю 48 между контроллером 42 и блоком терминала 52, в результате чего начинается фаза торможения. В этой точке в клапане управления переходными процессами обеспечивается небольшое отверстие для прохода гидравлической жидкости во время фазы выравнивания.
Для дальнейшего повышения комфортности движения в фазе выравнивания кабины 14 вычисляется второе расстояние до площадки. Как и в случае с путем торможения, второе расстояние определяется в зависимости от заданного пути останова на малой скорости выравнивания. На этом расстоянии от площадки контроллер 42 посылает следующий сигнал в клапан 44 управления переходными процессами. Серводвигатель переводит клапан 44 в положение, в котором поток жидкости через клапан еще более уменьшается, в результате чего кабина достигает второй, еще меньшей скорости выравнивания. Использование второй, меньшей скорости выравнивания уменьшает величину толчка при торможении, который воздействует на пассажиров, находящихся в кабине лифта 14, когда кабина останавливается без существенного увеличения продолжительности фазы выравнивания.
За счет отслеживания расстояния и скорости в фазах торможения и выравнивания обеспечивается учет изменений давления, вязкости и скорости движения гидравлической жидкости без использования сложной управляющей системы с обратной связью.
Как показано на фиг. 1, средство вычисления пути торможения встроено в контроллер 42. Альтернативный вариант реализации изобретения содержит систему управления 54, как показано на фиг. 2. Эта система управления 54 содержит аналогичную гидравлическую систему 28, содержащую цилиндр 32, насос 34, резервуар 36 и управляющий гидравлический клапан 38. Однако в данном варианте используется обычный контроллер 43 и система управления 54 дополнительно содержит блок интерфейса 56. Обычный контроллер 43 содержит средства, вырабатывающие команду торможения в зависимости от заданного расстояния кабины лифта 14 от площадки.
Однако в варианте, приведенном на фиг. 2, команда торможения не посылается от контроллера 43 непосредственно на клапан 44 управления переходными процессами, а посылается в блок интерфейса 56. Блок интерфейса 56 использует измерения скорости и положения, получаемые из считывающего устройства 22. Блок интерфейса 56 использует измеренную скорость для вычисления пути торможения в зависимости от скорости кабины. Получив команду торможения из контроллера 43, блок интерфейса 56 вычисляет разницу между действительным положением кабины (т. е. заданным расстоянием от кабины лифта до площадки) и вычисленной величиной пути торможения. Эта разница определяет задержку. Блок интерфейса 56 включает клапан 44 управления переходными процессами для перехода к фазе выравнивания после указанного времени задержки.
В процессе выравнивания определяется второе расстояние до площадки, и на этом расстоянии блок интерфейса 56 включает клапан 44 управления переходными процессами, в результате чего кабина лифта 14 начинает двигаться со второй, меньшей скоростью выравнивания.
Использование блока интерфейса 56 обеспечивает способ усовершенствования обычной системы управления для использования достоинств данного изобретения. Способ включает шаги присоединения блока интерфейса 56 между обычным контроллером 43 и гидравлическим клапаном 38 и подачу сигналов скорости и положения со считывающего устройства 22 в блок интерфейса 56. Блок интерфейса 56 подключается к контроллеру 43 таким образом, что команда торможения, вырабатываемая контроллером 43, подается в блок интерфейса, а не в клапан 44 управления переходными процессами. Блок интерфейса 56 после вычисления времени задержки в зависимости от измеренной скорости кабины включит гидравлический клапан 38, в частности его золотниковый клапан 44 управления переходными процессами, по истечении времени задержки. Если обычная система управления содержит соленоид, управляющий клапаном управления переходными процессами, то могут быть получены дополнительные выгоды путем замены упомянутого соленоида двигателем-приводом клапана управления переходными процессами.
Хотя указана одна перфорированная лента, могут быть использованы другие средства для определения положения и скорости такие, как набор сегментированных, перфорированных лент 58, размещенных возле площадок, как показано на фиг. 4. В данном варианте, как только вырабатывается команда торможения, сигналы скорости и положения, вырабатываемые считывающим устройством 62, используются для определения времени задержки.
В частном варианте системы управления, показанном на фиг. 3, функцию средства определения положения кабины лифта выполняет пусковое устройство 66, установленное в шахте лифта на заданном расстоянии от площадки. При достижении кабиной лифта указанного заданного расстояния от площадки это пусковое устройство 66 срабатывает, посылая сигнал в контроллер на выдачу команды торможения. Таким образом отпадает необходимость постоянно отслеживать текущее положение кабины лифта и сравнивать его с заданным расстоянием до площадки. Контакт между кабиной лифта и пусковым устройством 66, вызывающий срабатывание последнего, может быть механическим, электрическим, оптическим и т.д.
Для измерения скорости кабины лифта в этом частном варианте предусмотрен вращающийся датчик положения 64. Такой датчик может, например, быть установлен на кабине лифта таким образом, чтобы его вращающийся элемент взаимодействовал с ответным элементом шахты лифта. При этом текущее угловое положение вращающегося элемента отображает положение кабины лифта в шахте, а скорость вращения вращающегося элемента пропорциональна скорости движения лифта.
Реферат
Изобретение относится к гидравлическим лифтам. Система управления движением гидравлического лифта содержит управляющий гидравлический клапан, средство включения гидравлического клапана при достижении кабиной лифта расстояния от площадки, равного пути торможения, включающее в себя средство вычисления пути торможения в зависимости от измеренной скорости и заданной величины интервала времени для фазы торможения и средство определения положения кабины лифта и измерения ее скорости. Средство включения управляющего гидравлического клапана включает в себя контроллер выработки команды торможения в зависимости от заданного расстояния от кабины лифта до площадки, а средство вычисления пути торможения в зависимости от измеренной скорости и заданной величины интервала времени для фазы торможения содержит блок интерфейса, выполненный с возможностью вычисления времени задержки подачи команды на торможение в зависимости от разницы между вычисленной величиной пути торможения и заданным расстоянием от кабины лифта до площадки для включения упомянутого гидравлического клапана по истечении этого времени задержки и связанный со средством определения положения кабины и измерения скорости кабины, при этом блок интерфейса установлен между гидравлическим клапаном и контроллером. Изобретение обеспечивает повышение эффективности управления лифтом. 2 с. и 7 з.п. ф-лы, 4 ил.
Комментарии