Устройство управления передвижением кабины подъемника в зоне посадки - RU2550108C2
Код документа: RU2550108C2
Чертежи
Описание
УРОВЕНЬ ТЕХНИКИ
[0001] Системы лифтов обладают некоторыми признаками, предназначенными для обеспечения эффективной, надежной и удобной эксплуатации для пассажиров. Например, для пассажиров желательно обеспечить легкий доступ к кабине подъемника. Управление положением кабины подъемника, расположенной на посадочной площадке, обеспечивает легкость посадки пассажиров в кабину подъемника и высадки из нее.
[0002] Существуют промышленные стандарты и нормы, устанавливающие параметры, которые должны быть соблюдены при расположении кабины подъемника на посадочной площадке.
Согласно требованиям последней редакции стандарта EN81-1:1998 в Европе, необходимо ограничить перемещение кабины подъемника на посадочной площадке при открытых дверях кабины. В каждом из патентов США No.7,073,632; 7,137,484 и 7,775,329 предложено решение для ограничения перемещения кабины подъемника в таких условиях. Не ясно, сможет ли такой подход удовлетворить требованиям последней редакции стандарта, или обеспечат ли такие устройства экономическое решение.
Раскрытие изобретения
Приведенный в качестве примера способ применим для управления перемещением кабины подъемника в подъемной системе, которая содержит машину, вызывающую выборочное перемещение кабины подъемника, и машинный тормоз, выполненный с возможностью выборочного препятствования перемещению кабины подъемника. Способ включает определение нахождения кабины подъемника рядом с посадочной площадкой и определение положения, в котором двери кабины подъемника открыты. Необходимая операция включает необходимое перемещение кабины подъемника при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери. Осуществляется определение перемещения кабины подъемника, отличающегося от необходимого перемещения. Машинный тормоз применяют для остановки перемещения кабины подъемника в ответ на перемещение кабины подъемника, отличающегося от необходимого перемещения, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери.
[0003] Согласно варианту реализации приведенного в качестве примера способа по предыдущему параграфу, определение перемещения кабины подъемника, отличающегося от необходимого перемещения, может быть основано на индикации положения кабины подъемника относительно посадочной площадки.
[0004] Другой вариант реализации приведенного в качестве примера способа по любому из двух предыдущих параграфов может включать использование датчика зоны двери для определения нахождения кабины подъемника рядом с посадочной площадкой и для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
[0005] Другой вариант реализации приведенного в качестве примера способа по любому из трех предыдущих параграфов может включать использование датчика уровневого положения для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
[0006] В другом варианте реализации приведенного в качестве примера способа по любому из предыдущих параграфов необходимая операция может включать восстановление уровневого положения кабины подъемника после ее остановки на посадочной площадке.
[0007] В другом варианте реализации приведенного в качестве примера способа по любому из предыдущих параграфов необходимая операция может включать приближение к посадочной площадке и открытие двери до остановки кабины подъемника на посадочной площадке.
[0008] В другом варианте реализации приведенного в качестве примера способа по любому из предыдущих параграфов необходимая операция может содержать отправление от посадочной площадки до закрытия двери.
[0009] Приведенная в качестве примера подъемная система содержит подъемное отделение, имеющее посадочные площадки. Кабина подъемника выполнена с возможностью перемещения в подъемном отделении для обеспечения эксплуатации подъемника на любой из посадочных площадок.
Кабина подъемника содержит по меньшей мере одну дверь, выполненную с возможностью выборочного открытия или закрытия. Машину, вызывающую выборочное перемещение кабины подъемника. Машинный тормоз выполнен с возможностью выборочного препятствования перемещению кабины подъемника. Устройство управления определяет находится ли кабина подъемника рядом с посадочной площадкой, открыта ли дверь кабины подъемника и перемещается ли кабина подъемника отличным образом от необходимого перемещения, соответствующего необходимой операции, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери. Машинный тормоз останавливает перемещение кабины подъемника в ответ на перемещение кабины подъемника, отличающееся от необходимого перемещения, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери.
[00010] В варианте реализации приведенной в качестве примера системы по предыдущему параграфу, устройство управления может определять перемещается ли кабина подъемника отличным образом от необходимого перемещения, соответствующего необходимой операции, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери, на основании индикации положения кабины подъемника относительно посадочной площадки.
[00011] В другом варианте реализации приведенной в качестве примера системы по любому из двух предыдущих параграфов система может содержать датчик зоны двери рядом с каждой посадочной площадкой. Каждый датчик зоны двери может быть выполнен с возможностью обеспечения индикации положения кабины подъемника рядом с соответствующей посадочной площадкой. Индикация от датчика зоны двери может быть использована устройством управления для определения нахождения кабины подъемника рядом с посадочной площадкой и для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
[00012] В другом варианте реализации приведенной в качестве примера системы по любому из трех предыдущих параграфов система может содержать датчик уровневого положения рядом с каждой посадочной площадкой. Каждый датчик уровневого положения может быть выполнен с возможностью обеспечения индикации вертикального положения подъемника рядом с соответствующей посадочной площадкой. Индикация может быть использована устройством управления для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
[00013] В другом варианте реализации приведенной в качестве примера системы по любому из предыдущих параграфов необходимая операция может включать восстановление уровневого положения кабины подъемника после ее остановки на посадочной площадке.
[00014] В другом варианте реализации приведенной в качестве примера системы по любому из предыдущих параграфов необходимая операция может включать приближение к посадочной площадке и открытие двери до остановки кабины подъемника на посадочной площадке.
[00015] В другом варианте реализации приведенной в качестве примера системы по любому из предыдущих параграфов необходимая операция может включать отправление от посадочной площадки до закрытия двери.
[00016] В другом варианте реализации приведенной в качестве примера системы по любому из предыдущих параграфов устройство управления выполнено с возможностью предотвращения дальнейшего перемещения кабины подъемника после остановки перемещения кабины подъемника машинным тормозом в ответ на перемещение кабины подъемника, отличающееся от необходимого перемещения, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери до возврата устройства управления в исходное состояние вручную.
[00017] Из последующего подробного описания специалистам в данной области техники будут понятны различные признаки и преимущества раскрытого и приведенного в качестве примера варианта реализации изобретения. Далее следует краткое описание чертежей, сопровождающих подробное описание.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00018] На фиг.1 схематически изображены выбранные участки приведенной в качестве примера системы подъемника, разработанной в соответствии с вариантом реализации настоящего изобретения.
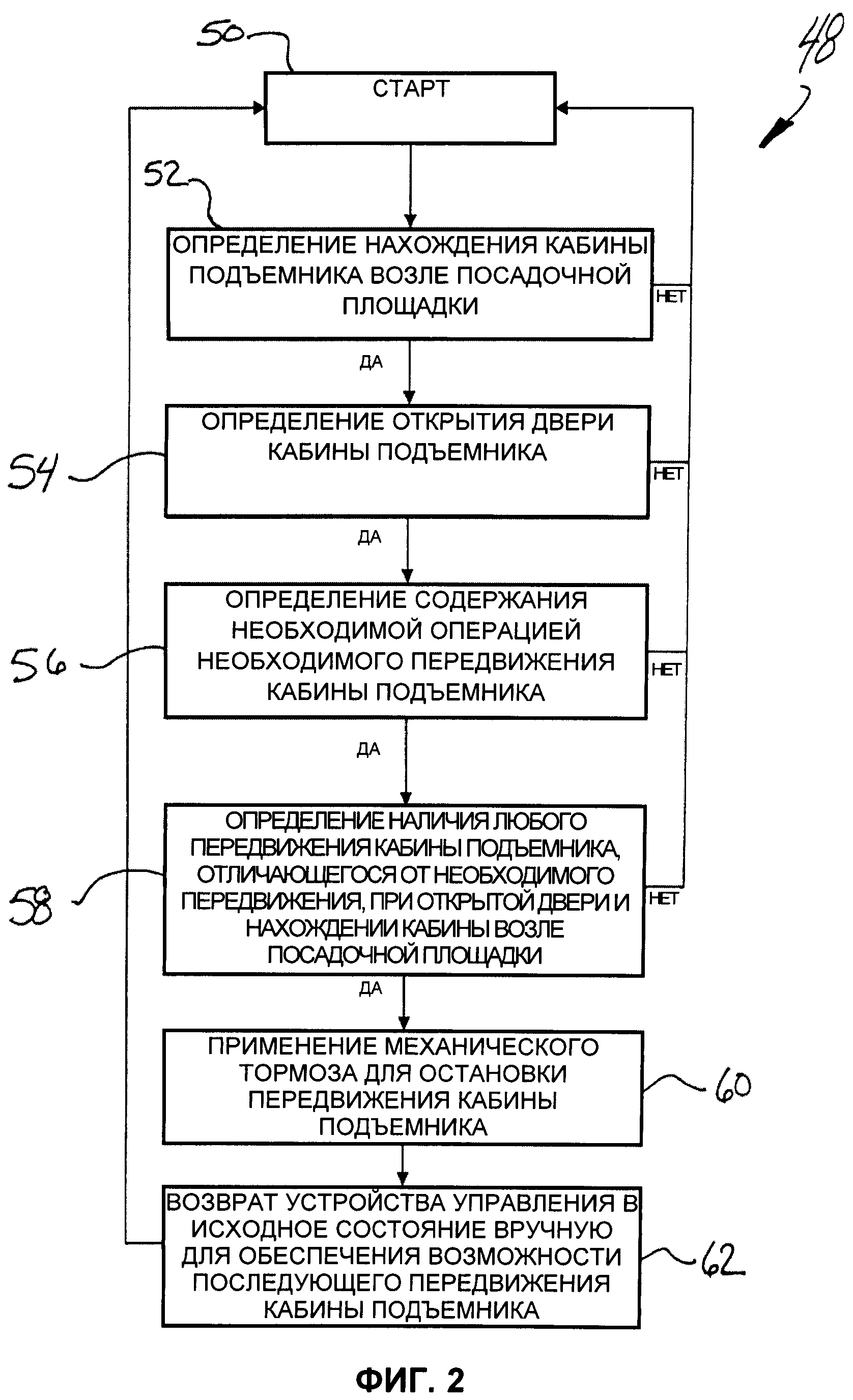
[00019] На фиг.2 изображена блок-схема, резюмирующая приведенную в качестве примера стратегию управления, применимую в варианте реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00020] На фиг.1 схематически изображены выбранные участки подъемной системы 20. Изображены только выбранные участки. Специалистам в области техники будет понятно, что подъемная система содержит многие другие компоненты. Эти компоненты опущены на чертежах и в описании для краткости и так как эти компоненты уже известны специалистам в данной области техники.
[00021] Кабина 22 содержит по меньшей мере одну дверь 24. Кабина 22 выполнена с возможностью перемещения в подъемном отделении 26 для обеспечения эксплуатации подъемника на посадочных площадках 28 и 30, например. Кабина 22 изображена расположенной на посадочной площадке 28.
[00022] В этом изображенном примере машина 32, вызывающая выборочное перемещение кабины 22. Тормоз 34, соответствующий этой машине, оказывает по выбору сопротивление перемещению кабины подъемника посредством приложения тормозящего усилия для остановки кабины 22 на одной из посадочных площадок 28 или 30, например. В некоторых примерах тормоз 34 также использован для защиты от превышения скорости при перемещении кабины по направлению вверх. Устройство 40 управления управляет работой машины 32 и машинного тормоза 34, соответственно.
[00023] Раскрытый пример содержит элементы управления для управления перемещением кабины 22 при ее расположении на посадочной площадке, такой как посадочная площадка 28. Даже если кабины лифтов остаются по существу неподвижными при расположении на посадочной площадке, иногда требуется некоторое перемещение при не закрытых дверях. Например, предпочтительно некоторое перемещение для восстановления уровневого положения кабины в ответ на изменение нагрузки на кабину, которое изменяет относительное положение пола кабины подъемника и примыкающего этажа посадки. Некоторые системы лифтов содержат элементы, предназначенные для уменьшения времени ожидания для пассажиров, например такие, которые позволяют начать открытие дверей перед остановкой кабины на посадочной площадке, или позволяют начать отправление кабины от посадочной площадки до полного закрытия дверей, например. В этом случае кабина 22 перемещается, когда дверь 24 открыта и кабина 22 находится рядом с посадочной площадкой.
[00024] Описанный пример обеспечивает возможность восстановления уровневого положения кабины 22 при расположении ее на одной из посадочных площадок 28 или 30. Датчик 42 уровневого положения выполнен для информирования устройства 40 управления при нахождении кабины 22 на необходимом уровне на посадочной площадке. При существенном изменении нагрузки на кабину 22, она может незначительно выйти из необходимого уровневого положения. Датчик 42 уровневого положения выполнен с возможностью индикации этого состояния устройству 40 управления, которое в ответ на эту индикацию осуществляет начало операции восстановления уровневого положения. При восстановлении уровневого положения кабины 22 подъемника, происходит необходимое перемещение кабины подъемника от текущего положения к необходимому уровневому положению на соответствующей посадочной площадке. Во время операции восстановления уровневого положения, тормоз 34 выключен для обеспечения необходимого перемещения кабины 22. Обычно машина 32 вызывает необходимое перемещение кабины 22. Во время необходимой операции восстановления уровневого положения, дверь 24 открыта, а кабина 22 находится рядом с посадочной площадкой 28, например.
[00025] При нахождении кабины 22 рядом с посадочной площадкой и при открытой двери, устройство 40 управления обеспечивает соответствие любого перемещения кабины подъемника необходимому перемещению кабины при таких условиях. Известный обводной контур двери (не показан) обеспечивает возможность перемещения кабины при открытой двери.
[00026] Описанный пример обеспечивает возможность осуществления начала открывания двери 24 до полной остановки кабины на посадочной площадке. Описанный пример также обеспечивает возможность осуществления начала отправления от посадочной площадки до полного закрывания двери 24. Датчики 44 зоны двери обеспечивают индикацию приближения кабины 22 в пределах должного расстояния от посадочной площадки для обеспечения начала открывания дверей кабины. Датчики 44 зоны двери обеспечивают информацию о положении кабины 22 относительно соответствующей посадочной площадки. Устройство 40 управления использует информацию от датчиков 44 для выполнения необходимых операций кабины подъемника для данных обстоятельств, таких как приближение к посадочной площадке или отправление от нее и управление приводом двери (не показан) для открытия или закрытия двери 24.
[00027] Описанные датчики зоны двери и датчики уровневого положения могут быть реализованы с использованием известного сенсорного оборудования и оснащения для этих целей. Конкретный тип датчика для данной подъемной системы может варьироваться, но специалисту в данной области техники будет понятно, как выбрать из известных компонентов и оснащения те, которые подходят для конкретных целей.
[00028] Устройство 40 управления в этом примере обеспечивает поддержание управления перемещением кабины 22, что включает предотвращение неконтролируемого перемещения кабины 22 при ее нахождении рядом с посадочной площадкой и при открытой двери 24. Условно, дверь 24 считается открытой в любом положении, кроме полностью закрытого положения.
[00029] Фиг.2 содержит блок-схему 48, резюмирующую приведенную в качестве примера стратегию управления; при этом блок-схема 50 начинается с этапа 50. За начальным этапом 50, протокол управления продолжен этапом 52, на котором устройство 40 управления определяет нахождение кабины 22 рядом с посадочной площадкой 28 или 30, например. Если результат определения на этапе 52 "нет", выполняется возврат протокола управления к начальному этапу 50. Однако, если результат определения на этапе 52 "да", выполняется переход протокола управления к этапу 54.
[00030] На этапе 54 устройство 40 управления определяет открыта ли дверь 24 кабины. Если результат определения на этапе 54 "нет", выполняется возврат протокола управления к начальному этапу 50. Однако, если результат определения на этапе 54 "да", выполняется переход протокола управления к этапу 56.
[00031] На этапе 56 определяется, включает ли в себя необходимая операция необходимое перемещение кабины подъемника. Приведенные в качестве примера необходимые операции включают восстановление уровневого положения кабины 22, открытие двери 24 кабины до полной остановки кабины 22 на посадочной площадке или начало отправления кабины 22 от посадочной площадки до полного закрытия двери 24. Во время любой из этих трех необходимых операций, приведенных в качестве примера, тормоз 34 выключен для обеспечения необходимого перемещения кабины подъемника. Если результат определения на этапе 56 "нет", выполняется возврат протокола управления к начальному этапу 50. Однако, если результат определения на этапе 56 "да", выполняется переход протокола управления к этапу 58.
[00032] На этапе 58 устройство 40 управления определяет перемещается ли кабина 22 отличным образом от необходимого перемещения, соответствующего необходимой операции. При возникновении нежелательного перемещения, оно может быть расценено, как неконтролируемое перемещение кабины. Соответственно, на этапе 58 устройство 40 управления определяет наличие любого подобного неконтролируемого перемещения при открытой двери 24 и нахождении кабины 22 рядом с посадочной площадкой. Если результат определения на этапе 58 "нет", выполняется возврат протокола управления к начальному этапу 50. Однако, если результат определения на этапе 58 "да", выполняется переход протокола управления к этапу 60.
[00033] На этапе 60, устройство 40 управления применяет машинный тормоз 34 для остановки любого дальнейшего перемещения кабины 22. В одном примере, при применении машинного тормоза 34 при таких обстоятельствах, для устройства 40 управления необходимо осуществление операции возврата в исходное состояние вручную до переведения кабины 22 устройством 40 управления обратно в режим нормальной работы.
[00034] В одном примере устройство 40 управления использует информацию от датчиков 44 зоны двери для определения перемещения кабины 22 в соответствии с необходимым перемещением при открытой двери 24 кабины и нахождении кабины 22 рядом с посадочной площадкой. Датчики участка дверей в этом примере использованы для индикации такого перемещения кабины 22 посредством обеспечения индикации положения кабины 22 относительно соответствующей посадочной площадки. В некоторых случаях при перемещении пола кабины 22 за пределы порогового расстояния от уровня соответствующего этажа посадки, устройство 40 управления выполнено с возможностью или настроено для применения тормоза 34.
[00035] Одна отличительная черта такого использования датчиков 44 зоны двери заключается в том, что в описанном примере задействованы уже существующие в системе 20 компоненты, и предоставлена дополнительная возможность управления перемещением кабины 22 рядом с посадочной площадкой при открытой двери 24 кабины посредством применения машинного тормоза 34 в ответ на перемещение, не соответствующее необходимому перемещению кабины 22.
[00036] В другом примере, устройство 40 управления использует индикацию от датчика 42 уровневого положения, относящуюся к положению кабины 22 относительно соответствующей посадочной площадки для определения любого перемещения кабины 22 рядом с посадочной площадкой при открытой двери 24, которое не соответствует необходимому перемещению. В одном примере, известный обводной контур двери (не показан) действует в ответ на сигналы датчика уровневого положения для осуществления управления машинным тормозом.
[00037] В другом примере, сочетание информации от датчика 44 зоны двери и датчика 42 уровневого положения использовано для контроля любого перемещения кабины 22 рядом с посадочной площадкой при открытой двери 24 кабины. В любом из этих случаев, информация о положении использована устройством 40 управления для определения такого перемещения кабины 22, при котором требуется применение машинного тормоза 34 для остановки такого перемещения.
[00038] Информация о положении кабины 22 относительно посадочной площадки использована в качестве индикации необходимости применения машинного тормоза 34 в одном примере. В другом примере, информация о положении использована для определения скорости перемещения. Еще один пример содержит сочетание информации о скорости и положении. Такая информация позволяет устройству 40 управления определять необходимость применения тормоза 34 при несоответствии положения или перемещения кабины 22 необходимому перемещению.
[00039] В примере задействованы уже существующие компоненты подъемной системы, и предоставлена возможность удовлетворения требований для предотвращения неконтролируемого перемещения кабины подъемника рядом с посадочной площадкой при открытой двери. В одном примере устройство 40 управления составляет часть приводного оборудования подъемника, ответственную за механическое управление во время нормальной работы подъемной системы. Раскрытый пример обеспечивает экономическое решение необходимости поддержки управления перемещением кабины подъемника рядом с посадочной площадкой при открытой двери кабины, которое не требует никаких существенных изменений в известных компонентах подъемной системы, в то же время, предоставляя совершенно новую возможность в пределах такой подъемной системы.
[00040] В раскрытом примере, при применении тормоза и остановке кабины подъемника в ответ на перемещение, не соответствующее необходимому перемещению, в соответствии с описанием выше, кабину выводят из работы до возврата устройства 40 управления в исходное состояние уполномоченным лицом для возобновления нормальной работы. Это обозначено как 62 на фиг.2. В одном примере устройство 40 управления дополнительно обеспечено программным обеспечением для включения подобного необходимого свойства ручного возврата в исходное состояние. В других примерах устройство 40 управления дополнительно обеспечено программным обеспечением, программно-аппаратным средством, аппаратным обеспечением или их сочетанием для обеспечения этого дополнительного свойства.
[00041] Предыдущее описание приведено в качестве примера и не предназначено для ограничения. Специалистам в области техники могут быть понятны вариации и модификации раскрытых примеров, которые не отступают от сущности настоящего изобретения. Объем правовой защиты настоящего изобретения может быть определен только из следующих пунктов формулы изобретения.
Реферат
Группа изобретений относится к области управления лифтами и может быть использована для управления перемещением кабины подъемника в подъемной системе. Способ управления перемещением кабины подъемника в подъемной системе, которая содержит машину для перемещения кабины подъемника и машинный тормоз для предотвращения перемещения кабины подъемника, заключается в определении нахождения кабины рядом с посадочной площадкой; нахождении двери кабины в открытом положении; выполнении необходимой операции; определении перемещения кабины, отличающегося от необходимого перемещения; и остановку перемещения кабины подъемника посредством применения машинного тормоза в ответ на перемещение кабины подъемника, отличающееся от необходимого перемещения, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери. Причем необходимая операция включает в себя необходимое перемещение кабины при нахождении ее рядом с посадочной площадкой и при открытой двери. Подъемная система содержит подъемное отделение, посадочные площадки, кабину лифта, содержащую, по меньшей мере одну дверь, выборочно открываемую или закрываемую, машину, вызывающую выборочное перемещение кабины, устройство управления, машинный тормоз, оказывающий выборочное сопротивление перемещению кабины подъемника. Причем устройство управления выполнено с возможностью определения нахождения кабины подъемника рядом с посадочной площадкой, определения нахождения двери кабины подъемника в открытом положении, определения передвижения кабины подъемника, отличающегося от необходимого перемещения, соответствующего необходимой опера�
Формула
определение нахождения кабины подъемника рядом с посадочной площадкой;
определение нахождения двери кабины подъемника в открытом положении;
выполнение необходимой операции, которая включает в себя необходимое перемещение кабины подъемника при нахождении ее рядом с посадочной площадкой и при открытой двери;
определение перемещения кабины подъемника, отличающегося от необходимого перемещения; и
остановку перемещения кабины подъемника посредством применения машинного тормоза в ответ на перемещение кабины подъемника, отличающееся от необходимого перемещения, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери.
использование датчика зоны двери для определения нахождения кабины подъемника рядом с посадочной площадкой и
использование датчика зоны двери для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
подъемное отделение, содержащее посадочные площадки;
кабину подъемника, выполненную с возможностью перемещения в подъемном отделении для обеспечения эксплуатации подъемника на любой из посадочных площадок и содержащую по меньшей мере одну дверь, выборочно открываемую или закрываемую;
машину, вызывающую выборочное перемещение кабины подъемника;
машинный тормоз, оказывающий выборочное сопротивление перемещению кабины подъемника; и
устройство управления, выполненное с возможностью
определения нахождения кабины подъемника рядом с посадочной площадкой,
определения нахождения двери кабины подъемника в открытом положении,
определения передвижения кабины подъемника, отличающегося от необходимого перемещения, соответствующего необходимой операции, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери, и
причем машинный тормоз выполнен с возможностью остановки перемещения кабины подъемника в ответ на перемещение кабины подъемника, отличающееся от необходимого перемещения, при нахождении кабины подъемника рядом с посадочной площадкой и при открытой двери.
датчик зоны двери рядом с каждой посадочной площадкой, причем каждый датчик зоны двери выполнен с возможностью обеспечения индикации положения кабины подъемника рядом с соответствующей посадочной площадкой; и
причем индикация от датчика зоны двери использована устройством управления для определения нахождения кабины подъемника рядом с посадочной площадкой и для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
датчик уровневого положения рядом с каждой посадочной площадкой, каждый датчик уровневого положения выполнен с возможностью обеспечения индикации вертикального положения подъемника рядом с соответствующей посадочной площадкой; и
причем индикация от датчика уровневого положения использована устройством управления для определения перемещения кабины подъемника, отличающегося от необходимого перемещения.
Комментарии