Способ контроля скорости в системе автоматизации для подъемно-транспортной установки - RU2392215C2
Код документа: RU2392215C2
Чертежи
Описание
Изобретение относится к способу контроля скорости в системе автоматизации для подъемно-транспортной установки, в частности для шахтной установки.
Подобный способ является известным из ЕР 0289813 B1. Описанный там способ работает уже очень надежно.
Для областей, таких как верхняя или нижняя конечная область шахтного ствола или промежуточная целевая остановка, действуют относительно надежности, однако, особенно строгие предписания в отношении контроля скорости. Контроль скорости здесь должен производиться двумя не зависимыми друг от друга видами. Так в подъемно-транспортных установках, во-первых, путем сравнения актуального значения скорости, которое, например, было определено посредством счетчика импульсов, смонтированного на приводном валу двигателя, с вычисленным в системе автоматизации значением скорости, реализуется первый вид контроля. Во-вторых, для дополнительного контроля пути и скорости транспортных средств применяют детекторные элементы, как, например, выключатели с электромагнитным приводом, или концевые выключатели, или фотоэлектрические реле вдоль пути транспортировки. Выдаваемый детекторным элементом импульс сообщает системе автоматизации мгновенное местонахождение транспортного средства. Максимально допустимое значение скорости, относящееся к этому местонахождению, сравнивают с актуальным значением скорости. Так в системе автоматизации реализуется второй вид контроля.
Задачей изобретения является указание способа контроля скорости, который по сравнению с уровнем техники может работать с одним, независимым от расположенных вдоль пути транспортировки детекторных элементов способом контроля скорости и тем не менее удовлетворяет особенно высоким требованиям надежности.
Задача решается способом контроля скорости в системе автоматизации для подъемно-транспортной установки, в частности для шахтной установки, при котором посредством по крайней мере одного счетчика импульсов определяют актуальное значение пути и актуальное значение скорости, при применении актуального значения пути вычисляют первое граничное значение скорости посредством заложенного в системе автоматизации вычислительного оператора, актуальное значение скорости сравнивают с первым значением скорости, при применении актуального значения пути из заложенной в системе автоматизации, представляющей ступенчатую кривую граничных значений таблицы данных, считывают второе граничное значение скорости и сравнивают актуальное значение скорости со вторым граничным значением скорости.
Путем соответствующего изобретению сравнения актуального значения скорости с заложенным в системе автоматизации значением скорости можно предпочтительно отказаться от сложного монтажа множества детекторных элементов вдоль пути транспортировки. Ввиду суровых условий окружающей среды вдоль пути транспортировки, например камнепада, за счет транспортируемого материала, является очень выгодным минимизировать количество детекторных элементов вдоль пути транспортировки. Таким образом можно уменьшать работы по техническому обслуживанию и содержанию в исправности и затраты. За счет функционально избыточного сравнения актуального значения скорости с двумя граничными значениями скорости, предоставленными в распоряжение различным образом, достигается особенно высокий уровень надежности.
Предпочтительно счетчик импульсов расположен вне пути транспортировки, в частности вне шахты. Как уже упоминалось, все элементы, которые расположены вдоль пути транспортировки, работают в особенно суровых условиях. Расположение счетчиков импульсов вне пути транспортировки дополнительно к удобству технического обслуживания повышает надежность установки.
Целесообразным является, что предусмотрены два или три счетчика импульсов. Например, так можно раздельно определять значения скорости и значения пути или, соответственно, дополнительно сравнивать на взаимную правдоподобность.
В предпочтительной форме выполнения изобретения граничные значения скорости ступенчатой кривой граничных значений вычисляют и устанавливают в зависимости от пути транспортировки перед началом эксплуатации и/или перед первым вводом в эксплуатацию. Предпочтительным образом граничные значения скорости ступенчатой кривой граничных значений вычисляют путем задания определенных параметров пути транспортировки, как, например, конечное положение, предварительно смещенное конечное положение, скорость замедления (вползания), путь вползания, значение коррекции, начало поворота, относительная глубина, первое конечное положение, второе конечное положение, максимальный отрезок транспортировки, максимальная скорость транспортировки, максимальный рывок, максимальное замедление, переподъем, предпочтительно с массивом данных в табличной форме.
Целесообразным является, что значения пути и скорости ступенчатой кривой граничных значений в системе автоматизации заданы неизменяемыми во время эксплуатации. Установку можно таким образом эксплуатировать особенно надежно, без вызывания ошибочного режима работы посредством случайной перезаписи ступенчатой кривой граничных значений.
Дальнейшие преимущества и соответствующие изобретению подробности получаются в связи с зависимыми пунктами формулы изобретения, чертежом и последующим описанием примера выполнения. При этом показывают:
фиг.1 - шахтную подъемно-транспортную установку с системой автоматизации,
фиг.2 - диаграмму путь-скорость.
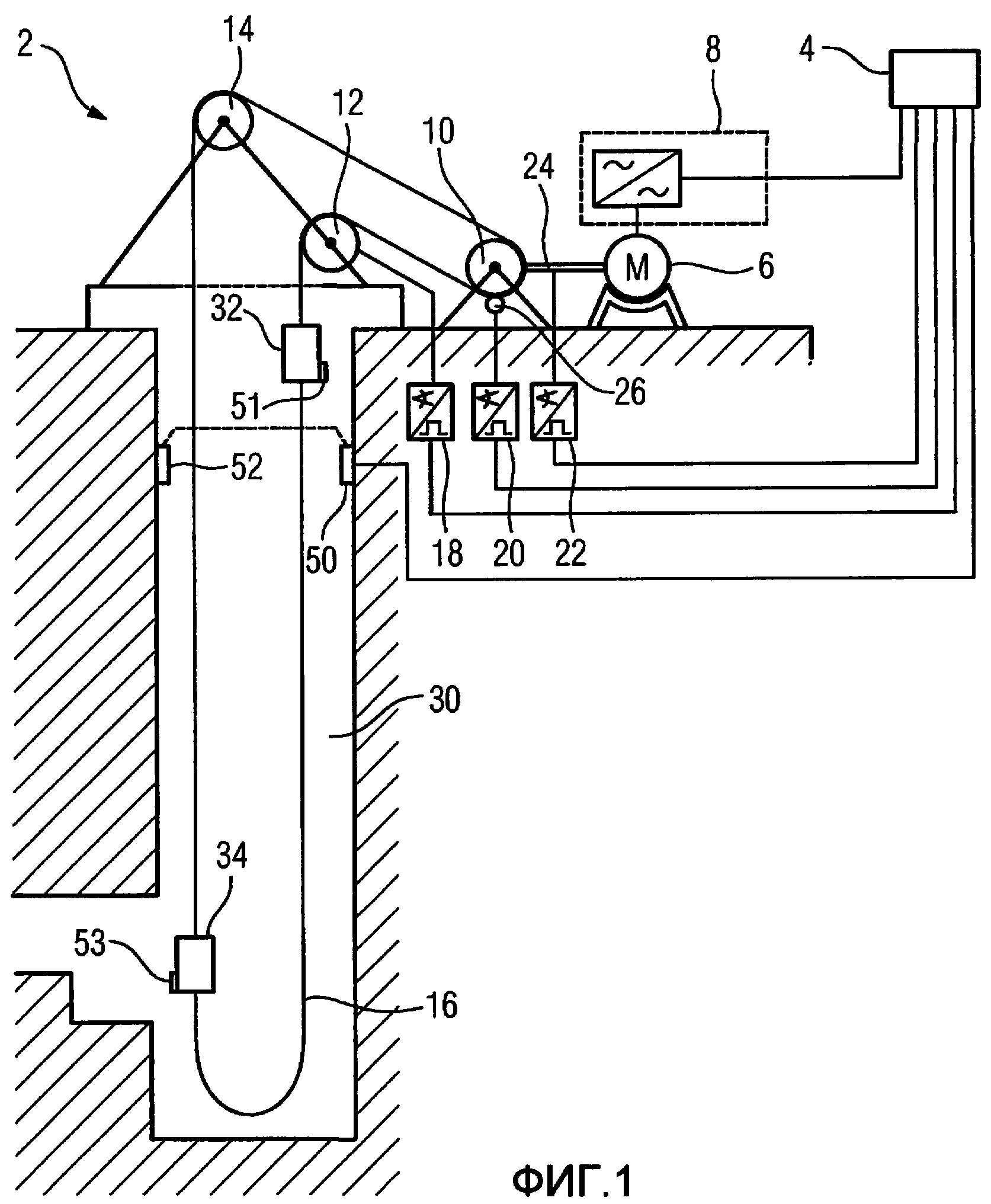
Фигура 1 показывает подъемно-транспортную установку 2 с системой автоматизации 4. Подъемно-транспортная установка 2 является шахтной подъемно-транспортной установкой горнопромышленной шахты, которая приводится в действие двигателем 6. Двигатель 6 управляется с регулированием частоты вращения через преобразователь частоты 8. Задания для регулирования частоты вращения преобразователя частоты 8 задают через систему автоматизации 4, которая находится в соединении с преобразователем частоты 8. Шахтная подъемно-транспортная установка 2 содержит две кабины, ветви или транспортные средства 32 и 34, которые перемещаются в шахте 30 тяговым канатом 16. Тяговый канат 16 через ведущий шкив 10 приводится в действие двигателем 6 и направляется через первый канатный шкив 12 и второй канатный шкив 14. Первый счетчик импульсов 18, второй счетчик импульсов 20 и третий счетчик импульсов 22 связаны через линии передачи данных с системой автоматизации 4.
Первый счетчик импульсов 18 регистрирует импульсы для значений пути и скорости на канатном шкиве 12. Второй счетчик импульсов 20 регистрирует импульсы для значений пути и скорости через фрикционный ролик 26 на ведущем шкиве 10. Третий счетчик импульсов регистрирует импульсы для значений пути и скорости на валу 24 двигателя 6.
За счет регистрации импульсов для значений пути и скорости в различных местах системе автоматизации 4 предоставляются в распоряжение с избыточностью импульсы для значений пути и скорости. Из соображений надежности и вследствие возможной пробуксовки каната на ведущем шкиве 10 предоставленные тремя счетчиками импульсов 18, 20 и 22 значения контролируют взаимно на непротиворечивость. Если значения являются взаимно непротиворечивыми, то одно из них или комбинацию из них используют в качестве измеренного значения для пути или, соответственно, скорости транспортных средств 32 и 34. В качестве положения транспортных средств 32 и 34 считается значение для пути, определенное таким образом.
В случае шахтных подъемно-транспортных установок транспортными средствами 32 и 34 транспортируют с высокими скоростями, например 12 м/с, не только материал, но также и людей. Тогда говорят также о спуске и подъеме людей по шахтному стволу. Требования техники безопасности для контроля скорости таких установок, в частности, для спуска и подъема людей являются соответственно высокими. Поэтому используют функционально избыточный способ контроля скорости. Тормозной путь шахтных подъемно-транспортных установок в конце шахтного ствола обычно является выбранным очень узко, поэтому надлежащее замедление установки должно контролироваться по всему пути замедления.
В противоположность шахтным подъемно-транспортным установкам, в случае которых скорость контролируется многочисленными детекторными элементами, расположенными вдоль пути транспортировки, скорость транспортных средств 32 и 34 этой установки можно контролировать за счет способа контроля скорости, который в основном отказывается от необходимости детекторных элементов.
Если, конечно, шахтная подъемно-транспортная установка 2 может эксплуатироваться только со значительной пробуксовкой каната, то необходимо указание положения для конечной области шахты посредством одного-единственного детекторного элемента 50 и 52 на каждое транспортное средство. Вследствие появляющейся пробуксовки каната или вследствие различных линейных расширений тягового каната 16 за счет сильно колеблющихся температур окружающей среды, например за счет времен года лето и зима, детекторные элементы 50 и 52 служат для транспортных средств 32 и 34 с относящимися к ним магнитами 51 и 53 исключительно для синхронизации измеренного пути транспортировки относительно точки отсчета. Детекторный элемент тем самым не является составной частью системы контроля скорости.
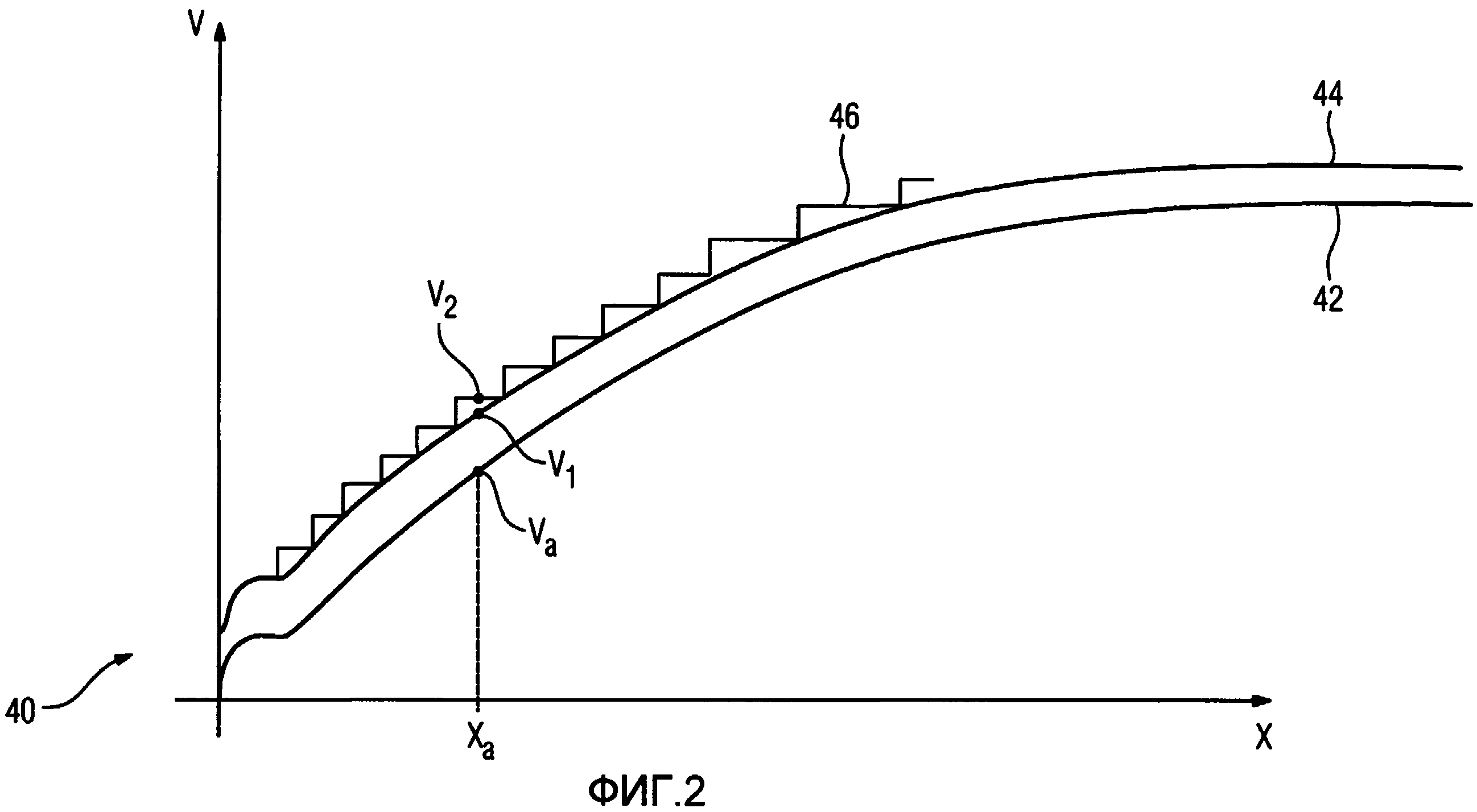
Фигура 2 показывает диаграмму путь-скорость 40, на которой измеренные значения Va, то есть значения скорости Va, которые были определены посредством счетчиков импульсов 18, 20 и 22, нанесены в зависимости от пути х. Одновременно счетчиками импульсов 18, 20 и 22 определяют актуальное значение пути Ха. Обозначенная ссылочной позицией 42 кривая является состоящей из актуальных значений скорости Va диаграммой движения 42.
Ссылочной позицией 44 обозначена первая кривая граничных значений. Кривая граничных значений 44 образуется из нанесенных в зависимости от пути х первых значений скорости V1. С применением актуального значения пути Ха посредством заложенного в системе автоматизации 4 вычислительного оператора вычисляют соответствующее граничное значение скорости V1. Кривая граничных значений 44 образует с приблизительно на 8 до 10% большими значениями скорости V1 огибающую к актуальной диаграмме движения 42 со значениями скорости Va.
Ступенчатая кривая граничных значений 46 является зависящей от пути транспортировки, вычисленной перед началом эксплуатации второй кривой граничных значений. Ступенчатую кривую граничных значений 46 вычисляют, например, в файле Excel перед началом эксплуатации и откладывают постоянно в блоке данных системы автоматизации 4. Опорные точки ступенчатой кривой граничных значений 46 соответствуют вычисленной кривой граничных значений 44. Ступенчатая кривая граничных значений 46 с максимально 127 ступенями является разделенной на значительно мелкие ступени, чем ступенчатая кривая, определенная при обычном образе действий через детекторные элементы, расположенные вдоль пути транспортировки. При новом применении актуального значения пути Ха второе граничное значение скорости V2 считывают из блока данных системы автоматизации 4, который содержит ступенчатую кривую граничных значений 46.
Для контроля скорости или, соответственно, дальнейшего сравнения значений скорости теперь имеются в распоряжении одно актуальное значение скорости Va и два граничных значения скорости V1 и V2. Как только актуальное значение скорости Va превысит граничные значения скорости V1 и/или V2, в системе автоматизации 4 вводят в действие необходимый для безопасности стандартный режим работы торможения и/или выдают акустический или оптический предупредительный сигнал. Так как было превышено по крайней мере одно из граничных значений скорости V1 или V2. установка должна немедленно тормозиться и выводиться из режима работы до ее остановки.
Реферат
Изобретение относится к технике управления подъемно-транспортными, в частности шахтными, установками. Посредством по крайней мере одного счетчика импульсов определяют фактическое значение пути (Ха) и фактическое значение скорости (Va). С применением фактического значения пути (Ха) определяют первое граничное значение скорости (V1) и второе граничное значение скорости (V2) и соответственно сравнивают с фактическим значением скорости (Va). При этом второе граничное значение скорости (V2) считывают из заложенной в системе автоматизации (4), представляющей ступенчатую кривую граничных значений (46) таблицы данных, а первое граничное значение скорости (V1) вычисляют посредством заложенного в системе автоматизации (4) вычислительного оператора. Первое граничное значение скорости (V1) и второе граничное значение скорости (V2) соответственно представляют собой верхние граничные значения скорости. При превышении фактическим значением скорости (Va) первого граничного значения скорости (V1) и/или второго граничного значения скорости (V2) в системе автоматизации (4) запускают влияющее на надежность действие. Предложенный способ не требует расположенных вдоль пути транспортировки детекторных элементов для определения положения и вместе с тем удовлетворяет требованию высокой надежности. 8 з.п. ф-лы, 2 ил.
Формула
посредством по крайней мере одного счетчика импульсов (18, 20, 22) определяют фактическое значение пути (Ха) и фактическое значение скорости (Va),
с применением фактического значения пути (Ха) определяют первое граничное значение скорости (V1) и второе граничное значение скорости (V2) и соответственно сравнивают с фактическим значением скорости (Va), причем второе граничное значение скорости (V2) считывают из заложенной в системе автоматизации (4), представляющей ступенчатую кривую граничных значений (46) таблицы данных,
отличающийся тем, что
первое граничное значение скорости (V1) вычисляют посредством заложенного в системе автоматизации (4) вычислительного оператора, причем первое граничное значение скорости (V1) и второе граничное значение скорости (V2) соответственно представляют собой верхние граничные значения скорости, и при превышении фактическим значением скорости (Va) первого граничного значения скорости (V1) и/или второго граничного значения скорости (V2) в системе автоматизации (4) запускают влияющее на надежность действие.
счетчик импульсов (18, 20, 22) расположен вне пути транспортировки, в частности вне шахты (30).
имеются два или три счетчика импульсов (18, 20, 22).
граничные значения скорости (V2) ступенчатой кривой граничных значений (46) вычисляют и устанавливают в зависимости от пути транспортировки перед началом эксплуатации и/или перед первым вводом в эксплуатацию.
значения пути и скорости ступенчатой кривой граничных значений (46) отложены в не допускающей перезапись и/или стирание области памяти автоматизированной системы (4).
Комментарии