Самонаклад для подачи листов - RU2373130C2
Код документа: RU2373130C2
Чертежи
Описание
Область изобретения
Настоящее изобретение относится к самонакладу для подачи листов, для отделения листов по одному из стопки, уложенной на столе, и для перемещения листов.
Например, в патентном документе 1 раскрыт процессор листов. В этом процессоре листов листы перемещаются и по одному подаются в процессор самонакладом. В корпусе процессора листы обрабатываются, подвергаясь разрезанию и/или фальцовке в направлении перемещения или в направлении, перпендикулярном направлению перемещения, в то время как листы перемещаются. Кроме того, например, в патентном документе 2 раскрывается технология, согласно которой листы засасываются и перемещаются по одному в самонаклад. Далее, например, в патентном документе 3 раскрывается технология, согласно которой манипулятор размещается в положении манипулирования, когда кассета для подачи листов установлена в положение подачи листов и манипулятор выводится из положения манипулирования, когда кассета для подачи листов не находится в положении подачи листов.
Патентный документ 1: японская выложенная заявка на патент № 2001-232700.
Патентный документ 2: японская выложенная заявка на патент № 2000-34052.
Патентный документ 3: японская выложенная заявка на патент № Н11-334901.
Описание изобретения
Задача, решаемая изобретением
В процессоре листов по патентному документу 1, например, процесс разрезания листа в направлении перемещения осуществляется с базированием по кромке листа. Следовательно, в каждом из самонакладов по патентным документам 1 и 2 лист подается так, что его кромка позиционируется по направляющей стенке.
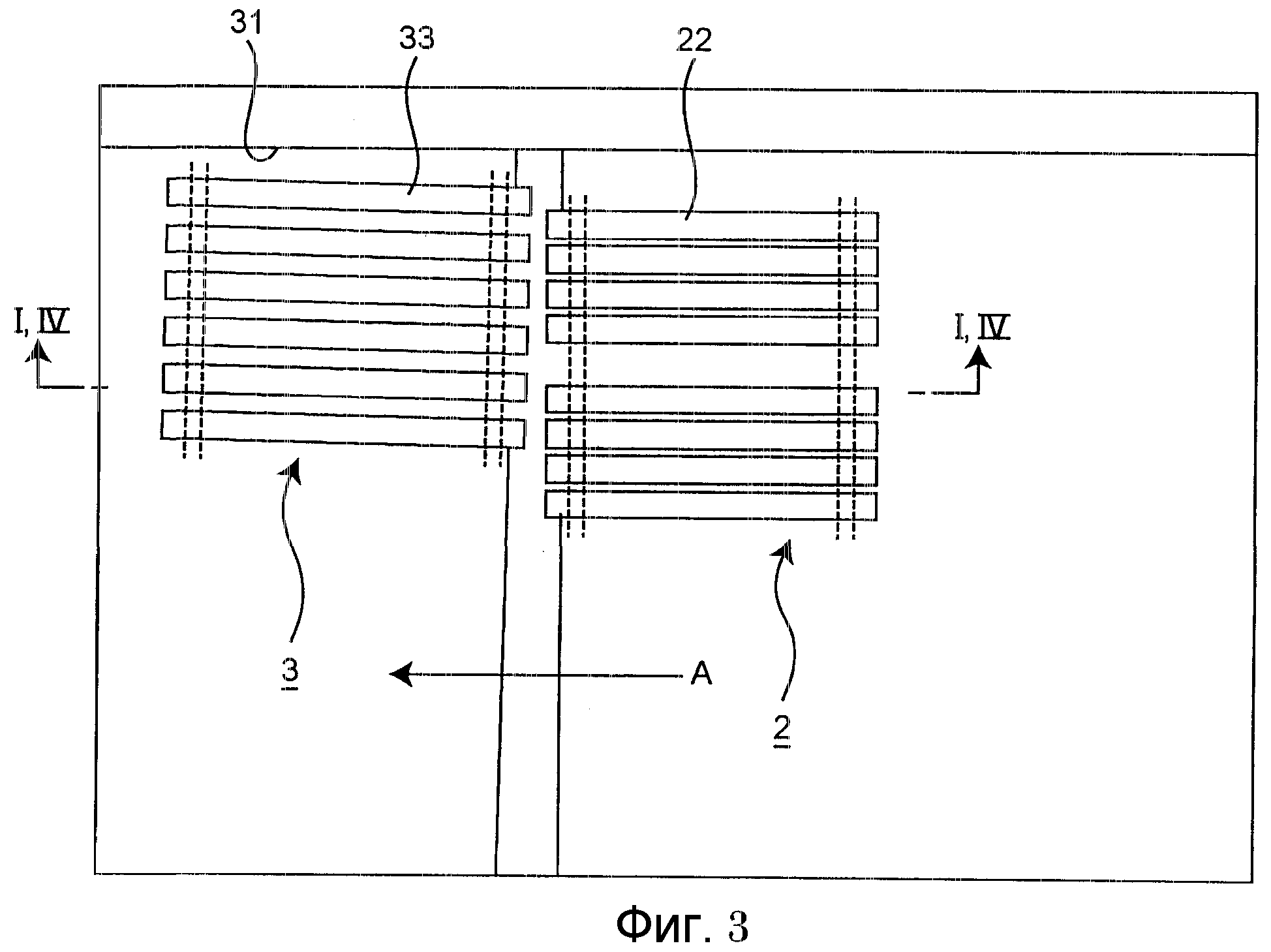
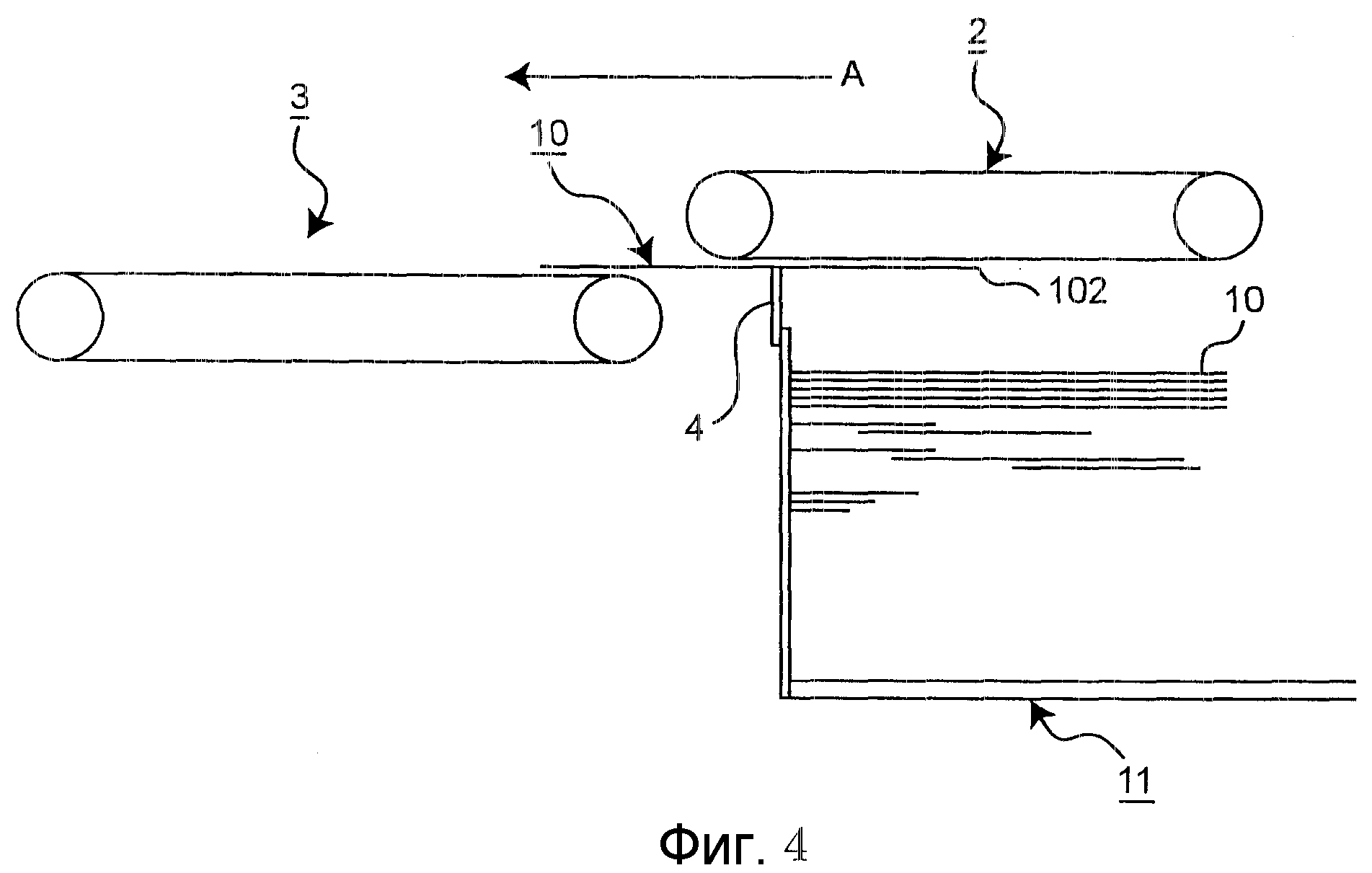
На фиг.3 представлен вид сверху, показывающий такой упомянутый выше самонаклад. Такой самонаклад имеет конструкцию, в которой лист подается так, что его кромка позиционируется по направляющей стенке. Самонаклад состоит из присасывающего перемещающего средства 2, расположенного на входной стороне относительно направления перемещения (по стрелке «А») и наклонного перемещающего средства 3, расположенного на выходном конце относительно того же направления, где присасывающее перемещающее средство 2 и наклонное перемещающее средство 3 интегрированы друг с другом. На фиг.4 показано схематическое вертикальное сечение, иллюстрирующее обычный самонаклад, и этот чертеж соответствует сечению по линии IV-IV на фиг.3. Присасывающее перемещающее средство 2 присасывает верхний лист 10, расположенный сверху стопки 10, которая уложена на столе 11 самонаклада, а затем средство 2 перемещает лист 10 из входной стороны к выходной стороне в направлении перемещения. Наклонное перемещающее устройство 3 перемещает лист 10 наклонно к направляющей стенке 31. Далее, наклонное перемещающее средство 3 переносит лист 10 дальше в направлении перемещения. Под выходной стороной присасывающего перемещающего устройства 2 расположено манипулирующее средство 4. Манипулирующее средство 4 позволяет пройти через него только самому верхнему листу 10 стопки, который перемещается присасывающим перемещающим средством 2.
В описанном выше обычном самонакладе, когда лист 10 проходит через манипулирующий элемент 4 и начинает переноситься наклонным перемещающим средством 3, лист 10 все еще контактирует с манипулирующим элементом 4, как показано на фиг.4. Такое положение этого манипулирующего элемента сохраняется до тех пор, пока задний конец 102 листа 10 не пройдет через манипулирующий элемент 4. Если лист 10 удерживается в контакте с манипулирующим элементом 4, манипулирующий элемент 4 становится препятствием для листа 10, и поэтому лист 10 на наклонном перемещающем средстве 3 не может транспортироваться плавно. В результате возникает проблема, заключающаяся в том, что лист 10 подается из самонаклада до того, как кромка листа 10 будет позиционирована по направляющей стенке 31.
Кроме того, в самонакладе по патентному документу 3 манипулирующий элемент все время расположен в положении манипулирования, когда лист перемещается. Следовательно, возникает проблема, сходная с вышеупомянутой.
Целью настоящего изобретения является создание самонаклада для подачи листов, в котором, когда лист проходит через манипулирующий элемент 4, он перемещается наклонно к направляющей стенке 31 наклонным перемещающим средством 3, при этом манипулирующий элемент 4 не является препятствием для перемещения, и, следовательно, реализуется плавное перемещение наклонным перемещающим средством 3.
Средства для решения проблемы
Настоящее изобретение отличается тем, что содержит средство детектора и втягивающий механизм в самонакладе для подачи листов, который содержит присасывающее перемещающее средство, наклонное перемещающее средство и манипулирующий элемент и который отделяет листы по одному сверху стопки листов, уложенных на столе для подачи листов, а затем транспортирует листы. Присасывающее перемещающее средство присасывает верхний лист из стопки и перемещает верхний лист от входной стороны на выходную сторону в направлении подачи. Наклонное перемещающее средство является средством для перемещения листа на наклонном перемещающем средстве, при этом наклонное перемещающее средство расположено на выходной стороне присасывающего перемещающего средства, причем наклонное перемещающее средство перемещает лист наклонно к направляющей стенке для позиционирования кромки листа вдоль направляющей стенки, и наклонное перемещающее средство перемещает лист в направлении подачи. Манипулирующий элемент пропускает только самый верхний лист, который перемещает присасывающее перемещающее средство. Средство детектора детектирует лист, который проходит через манипулирующий элемент, при этом средство детектора расположено за манипулирующим элементом. Втягивающий механизм отводит манипулирующий элемент от листа, проходящего через него, когда средство детектора определяет, что лист проходит через манипулирующий элемент.
Эффекты изобретения
В настоящем изобретении, когда средство детектора определяет, что лист проходит через манипулирующее средство, втягивающий механизм отводит манипулирующий элемент от проходящего через него листа. Следовательно, согласно настоящему изобретению, когда лист, проходящий через него, перемещается наклонно к направляющей стенке наклонным перемещающим средством, манипулирующий элемент не является препятствием для такого перемещения и, следовательно, наклонное перемещающее средство осуществляет плавное перемещение листа. То есть, согласно настоящему изобретению, лист может перемещаться наклонным перемещающим средством, без помех со стороны манипулирующего средства. Соответственно, настоящее изобретение может решить проблему, при которой из самонаклада выходит лист, кромка которого не позиционирована по направляющей стенке. Следовательно, настоящее изобретение может обеспечить точную обработку листа после его подачи в корпус процессора.
Краткое описание чертежей
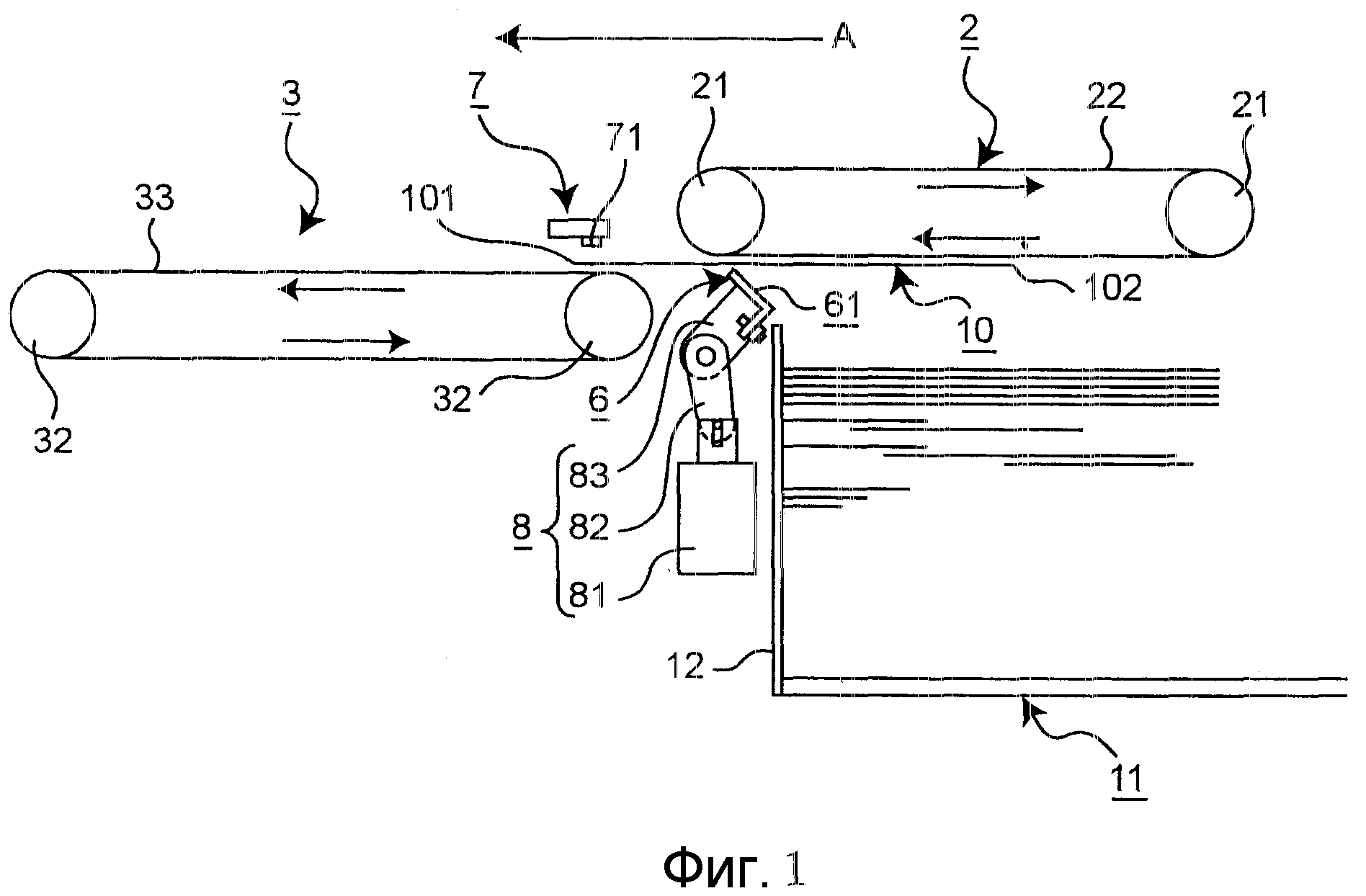
Фиг.1 - схематическое вертикальное сечение самонаклада по настоящему изобретению, соответствующее сечению по линии I-I на фиг.3.
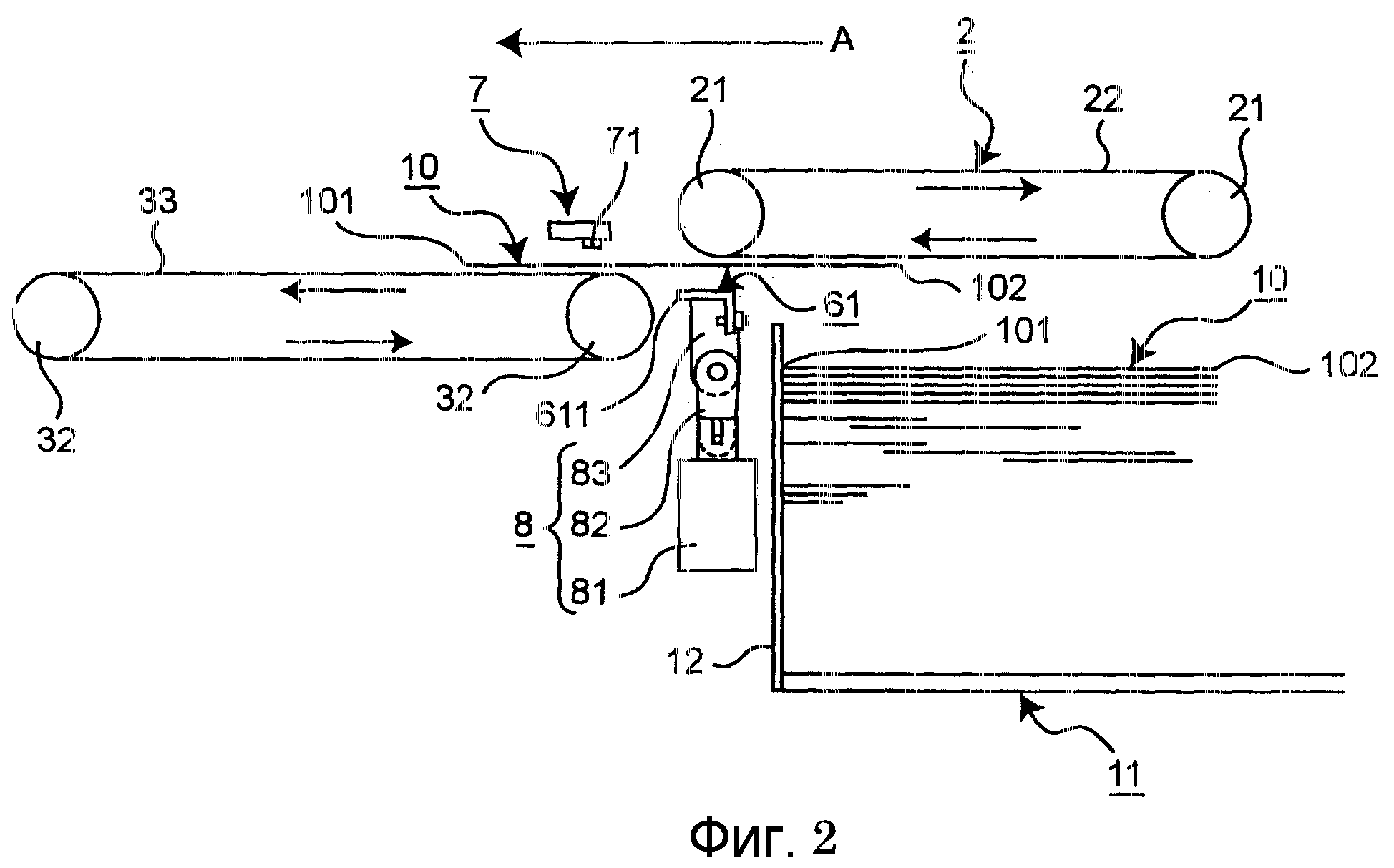
Фиг.2 - схематическое вертикальное сечение, показывающее состояние, следующее после состояния, показанного на фиг.1.
Фиг.3 - вид сверху самонаклада.
Фиг.4 - схематическое вертикальное сечение известного самонаклада, соответствующее сечению по линии IV-IV на фиг.3.
Предпочтительный вариант выполнения изобретения
На фиг.1 представлено схематическое вертикальное сечение самонаклада по настоящему изобретению, которое соответствует сечению по линии I-I на фиг.3. На фиг.1 и 4 одинаковыми позициями обозначены одинаковые соответствующие компоненты. Самонаклад по настоящему изобретению имеет присасывающее перемещающее средство 2, расположенное на входном конце относительно направления перемещения (показанного стрелкой «А»), и наклонное перемещающее средство 3, расположенное на выходном конце относительно того же направления, где присасывающее перемещающее средство 2 и наклонное перемещающее средство 3 интегрированы друг с другом.
Более конкретно, самонаклад по настоящему изобретению имеет присасывающее перемещающее средство 2, средство наддува (не показано), манипулирующий элемент 6 и наклонное перемещающее средство 3. Присасывающее перемещающее средство 2 присасывает самый верхний лист 10 из стопки листов 10, уложенной на столе 11, и затем средство 2 перемещает лист 10 от входной стороны к выходной стороне в направлении перемещения. Средство наддува подает воздух к передним кромкам 101 выходной стороны стопки листов 10 от выходной стороны. Манипулирующий элемент 6 пропускает только самый верхний лист 10, перемещаемый присасывающим перемещающим средством 2. Наклонное перемещающее средство 3 перемещает лист 10 на наклонном перемещающем средстве 3. Наклонное перемещающее средство 3 перемещает лист 10 наклонно к направляющей стенке 31 для позиционирования кромки листа 10 по направляющей стенке 31, и наклонное перемещающее средство 3 перемещает лист 10 к выходной стороне в направлении перемещения. Листы 10 уложены в стопку на подающем столе 11. Кроме того, передние кромки 101 листов 10 контактируют с торцевой стенкой 12 выходной стороны подающего стола 11.
Присасывающее перемещающее средство 2 имеет бесконечную кольцевую ленту 22, присасывающее средство (не показано). Лента 22 проходит между парой вращающихся валков 21. Присасывающее средство присасывает лист 10 под лентой 22 так, чтобы он присосался к ленте 22. Присасывающее перемещающее средство 2 перемещает лист 10 к выходному концу в соответствии с движением ленты 22 в направлении, показанном стрелкой, когда лист 10 присосан к ленте 22.
Средство наддува имеет отверстие наддува (не показано), которое проходит сквозь торцевую стенку 12, и нагнетатель воздуха (не показан), который соединен с отверстием наддува. Средство нагнетателя воздуха нагнетает воздух через отверстие наддува от выходного конца к входному концу.
Наклонное перемещающее средство 3 перемещает лист 10, перемещаемый присасывающим перемещающим средством 2, на бесконечной кольцевой ленте 33. Лента 33 проходит между парой вращающихся валков 32. Лента 33 установлена слегка наклонно к направляющей стенке 31 относительно направления перемещения. Следовательно, на наклонном перемещающем средстве 3 лист 10 перемещается, одновременно прижимаясь к боковой направляющей стенке 31. Следовательно, лист 10 перемещается в направлении по стрелке «А» в состоянии, когда кромка листа 10 позиционирована по направляющей стенке 31.
Манипулирующий элемент 6 по настоящему изобретению снабжен средством детектора 7 и втягивающим механизмом 8.
Манипулирующий элемент 6 имеет выступающую часть 61. Выступающая часть 61 расположена над торцевой стенкой 12 подающего стола 11 и под присасывающим перемещающим средством 2, и выступающая часть 61 расположена вертикально и наклонена в направлении перемещения.
Средство детектора 7 имеет датчик 71, расположенный над концевой частью входной стороны наклонного перемещающего средства 3. Когда датчик 71 определяет переднюю кромку 101 листа 10, который перемещается на ленте 33 наклонного перемещающегося средства 3, он выводит сигнал втягивания, который поступает на втягивающий механизм 8. А когда датчик 71 определяет заднюю кромку 102 листа 10, он выводит сигнал возвращения, который поступает на втягивающий механизм 8.
Втягивающий механизм 8 имеет поршневой механизм 81, первый рычаг 82, который связан с поршневым механизмом 81, и второй рычаг 83, который шарнирно соединен с первым рычагом 81. Во втягивающем механизме 8 выступающая часть 61 закреплена на конце второго рычага 83. Как показано на фиг.2, когда втягивающий механизм получает сигнал на втягивание от датчика 71, поршневой механизм 81 срабатывает так, чтобы втянуть вниз первый рычаг 82. Тем самым втягивающий механизм 8 переводит первый рычаг 82 в по существу вертикальное положение и, тем самым, переводит второй рычаг 83 по существу в вертикальное положение. В результате кромка 611 выступающей детали 61 опускается. Когда втягивающий механизм 8 принимает от датчика 71 сигнал возврата, поршневой механизм 81 срабатывает, толкая первый рычаг 82. Тем самым, втягивающий механизм 8 возвращает выступающую часть 61 обратно в положение, показанное на фиг.1, которое является положением манипулирования листом.
Далее следует пояснение работы самонаклада указанной выше конструкции.
Сначала средство наддува срабатывает так, что нагнетаемый воздух поступает из порта наддува к верхней части стопки листов 10, уложенных на подающем столе 11. Тем самым формируется зазор между несколькими смежными листами 10, расположенными в верхней части стопки, и эти листы 10 «плавают» по отношению друг к другу, тем самым облегчая их отделение друг от друга. В этом состоянии срабатывает присасывающее средство присасывающего перемещающего средства 2. В результате самый верхний лист 10 присасывается к ленте 22. Затем срабатывает вращающийся валок 21. При этом лист 10, присосавшийся к ленте 22, проходит через манипулирующий элемент 6 и затем перемещается на наклонное перемещающее средство 3 в соответствии с движением ленты 22. Наклонное перемещающее средство 3 перемещает лист 10 на ленте 33. Наклонное перемещающее средство 3 перемещает лист 10 наклонно к направляющей стенке 31, и одновременно наклонное перемещающее средство 3 перемещает лист 10 к выходной стороне в направлении перемещения. Тем самым лист 10 подается в направлении, показанном стрелкой «А» в состоянии, когда кромка листа 10 позиционирована по направляющей стенке 31.
Во время вышеописанной операции, как показано на фиг.1, когда лист 10 присосан и перемещается присасывающим перемещающим средством 2, когда лист 10 проходит через манипулирующий элемент 6 и когда передняя кромка 101 ложится на ленту 33 наклонного перемещающего средства 3, датчик 71 определяет эту переднюю кромку 101 и подает сигнал втягивания на втягивающий механизм 8. Получив сигнал втягивания, втягивающий механизм 8 включает поршневой механизм 81 и опускает кромку 611 выступающей части 61, как показано на фиг.2. При этом манипулирующий механизм удерживается вне контакта с листом 10, который проходит через манипулирующий элемент 6. Следовательно, лист 10, передняя кромка 101 которого легла на ленту 33 наклонного перемещающего средства 3, перемещается этим средством 3 плавно, без помех со стороны манипулирующего элемента 6. Таким образом, в самонакладе вышеописанной конструкции лист 10 подается в направлении, показанном стрелкой «А», наклонным перемещающим средством 3 так, что кромка листа 10 позиционирована по направляющей стенке 31.
Когда датчик 71 обнаруживает заднюю кромку 102 листа 10, который прошел через манипулирующий элемент 6, он выдает сигнал возврата на втягивающий механизм 8. Получив этот сигнал, втягивающий механизм 8 включает поршневой механизм 81, как указано выше, и выступающая часть 61 возвращается в положение для манипулирования листом. Присасывающее перемещающее средство 2 присасывает новый лист 10, который проходит через манипулирующий элемент 6.
Как указано выше, в самонакладе вышеописанной конструкции, когда средство детектора 7 определяет лист 10, который проходит через манипулирующий элемент 6, втягивающий механизм 8 втягивает манипулирующий элемент 6, отводя его от листа 10, проходящего через манипулирующий элемент 6. Следовательно, лист 10 может перемещаться наклонным перемещающим средством 3 плавно, без помех со стороны манипулирующего элемента 6. Следовательно, в самонакладе описанной выше конструкции лист 10 подается наклонным перемещающим средством 3 в положении, когда кромка листа 10 позиционирована по направляющей стенке 31.
Промышленная применимость
Самонаклад по настоящему изобретению может подавать лист в состоянии, когда кромка листа 10 позиционирована по направляющей стенке. В результате обеспечивается точность обработки листа в корпусе процессора, и следовательно, полезность настоящего изобретения в промышленности велика.
Описание ссылочных позиций
2 - присасывающее перемещающее средство
3 - наклонное перемещающее средство
31 - направляющая стенка
6 - манипулирующий элемент
7 - средство детектора
8 - втягивающий механизм
Реферат
Настоящее изобретение относится к самонакладу для подачи листов по одному из стопки, уложенной на столе, и для перемещения листов. Самонаклад содержит присасывающее перемещающее средство для присасывания и перемещения верхнего листа, наклонное перемещающее средство для перемещения листа, перемещенного присасывающим средством. Наклонное перемещающее средство расположено после присасывающего перемещающего средства и перемещает лист наклонно к направляющей стенке для позиционирования кромки листа по направляющей стенке. Наклонное перемещающее средство перемещает лист к выходной стороне в направлении перемещения. Устройство также содержит манипулирующий элемент, пропускающий через себя только верхний лист стопки, перемещаемый присасывающим перемещающим средством. Манипулирующий элемент имеет выступающую часть, расположенную под присасывающим перемещающим средством. Самонаклад содержит средство детектора, расположенное после манипулирующего средства, для обнаружения листа, который проходит через манипулирующее средство и втягивающий механизм. Втягивающий механизм отводит манипулирующий элемент от листа, проходящего через манипулирующий элемент, когда средство детектора определит заднюю кромку листа после того, как средство детектора определит переднюю кромку листа. Технический результат направлен на точную обработку листа после его подачи в корпус процессора. 4 ил.
Комментарии