Устройство формирования изображения - RU2427522C1
Код документа: RU2427522C1
Чертежи





















Описание
Предпосылки создания изобретения
Область техники, к которой относится изобретение
Данное изобретение относится к устройству формирования изображения, предназначенному для формирования изображения на листе, а более конкретно - к устройству формирования изображения, которое выдувает воздух на листы таким образом, что эти листы отделяются друг от друга и подаются через устройство формирования изображения.
Характеристика предшествующего уровня техники
Обычно устройство формирования изображения, такое как принтер и копировальный аппарат, включает в себя самонаклад для подачи листов, предназначенный для подачи одного листа за другим из содержащей листы части, в которой содержится множество листов. В качестве примера самонаклада для подачи листов, как описано в патенте США №5645274, можно привести самонаклад для подачи листов, в котором используется воздух для отделения и подъема листов, при этом множество листов выдуваются вверх выдуваемым воздухом к концевой части стопы листов, поддерживаемой поднимаемым и опускаемым лотком, и лишь один лист за раз засасывается на ленту пневматической транспортировки, расположенную выше.
Фиг.13 иллюстрирует пример обычного самонаклада для подачи листов выдуваемым воздухом. Как показано на фиг.13, в контейнере 11 листов предусмотрен поднимаемый и опускаемый лоток 12, на котором уложены в стопку множество листов S. Когда листы S лежат на лотке 12, положения листов S удерживаются на конце (именуемом далее передним краем (ведущая кромка)) на стороне выхода потока в направлении подачи листов пластиной 17 регулирования переднего края, и эти положения листов S фиксируются на конце (именуемом далее задним краем) на стороне входа потока в направлении подачи листов пластиной 13 регулирования заднего края. Кроме того, положения листов S также регулируются на обоих боковых краях в направлении (именуемом далее направлением ширины), перпендикулярном направлению подачи листов, пластинами 14 регулирования боковых краев.
Над контейнером 11 листов предусмотрены часть 20 пневматического транспортера, которая включает в себя ленту 21 пневматической транспортировки для вытягивания и транспортировки листа S, и выдувающую воздух часть 30. Выдувающая воздух часть 30 выдувает воздух к концевой части стопы листов S на лотке, выдувая множество листов S кверху, и выдувающая воздух часть 30 отделяет каждый из листов S.
Выдувающая воздух часть 30 засасывает воздух с направления, обозначенного стрелками С, и выдувает порцию воздуха в направлении, обозначенном стрелками D, и потому несколько верхних листов из пачки листов на лотке 12 выдуваются кверху. Кроме того, выдувающая воздух часть 30 выдувает другую порцию воздуха в направлении, обозначенном стрелками Е, и поэтому крайний сверху лист из тех листов, которые поднимаются выдуваемым воздухом, отделяется от других. Таким образом, крайний сверху лист может быть втянут посредством ленты 21 пневматической транспортировки.
Самонаклад для подачи листов зачастую заимствуется для высокопроизводительного аппарата, который способен подавать 70 (семьдесят) листов формата А4 или LTR или более в минуту. Лоток 12 включает в себя механизм, в котором узел привода (не показан) поднимает и опускает лоток 12 в вертикальном направлении, поддерживая при этом лоток 12, по существу, горизонтально. На фиг.13 также показана транспортирующая часть 20, которая представляет собой круговую транспортерную ленту 21, вращаемую роликами 41, подробнее описываемую ниже.
На фиг.14 представлен вид в плане, иллюстрирующий подробности контейнера 11 листов. Пластина 13 регулирования заднего края, предназначенная для регулирования заднего края листа, расположена с возможностью перемещения параллельно направлению подачи листов, обозначенному стрелкой Н. Пластины 14 и 16 регулирования боковых краев, предназначенные для регулирования боковых краев листа, выполнены с возможностью перемещения в направлении ширины листа, обозначенном стрелкой V.
Таким образом, пластина 13 регулирования заднего края и пластины 14 и 16 регулирования боковых краев перемещаются, в результате чего можно укладывать в стопу и поддерживать на лотке 12 лист в диапазоне форматов от минимального SS до максимального LS. Чтобы не препятствовать движению пластин 14 и 16 регулирования боковых краев, пластина 13 регулирования заднего края расположена с возможностью перемещения только в центральной части в направлении ширины лотка 12.
В данном случае, пластина 13 регулирования заднего края снабжена отделяющей задний край частью 18, выполненной с возможностью перемещения в вертикальном направлении для регулирования положения части заднего края, которая представляет собой конец на стороне выхода потока в направлении подачи листов крайнего сверху листа Sa. Отделяющая задний край часть 18 имеет выступы 18D, выступающие из поверхности 13С регулирующей части пластины 13 регулирования заднего края, изображенной на фиг.13, и предназначенные для нажатия сверху на часть заднего края крайнего сверху листа Sa. К стороне нижней поверхности выступа 18D, которая контактирует с листом, приклеен способствующий отделению лист 18Е, имеющий высокий коэффициент сцепления, для придания стойкости верхней поверхности уложенных в пачку листов.
Когда крайний сверху лист Sa подается на длину, соответствующую длине выступания выступа 18D, как показано на фиг.13, отделяющая задний край часть 18 опускается так, что упирается в лист Sb непосредственно под крайним сверху листом Sa. В этом случае, из-за силы трения, создаваемой весом отделяющей задний край части 18, становится возможным предотвращение транспортировки второго сверху листа Sb во время транспортировки крайнего сверху листа Sa, и поэтому можно подавить возникновение подачи более чем одного листа. Кроме того, если на лотке нет листов, выступ 18D упирается в поверхность лотка 12.
На фиг.13 показано, что на отделяющей задний край части 18 предусмотрены поддерживающие части 18А, вводимые в зацепление с зацепляемой частью 13Е, которая предусмотрена на пластине 13 регулирования заднего края. Кроме того, поддерживающие части 18А снабжены шаровой опорой или роликом, имеющей или имеющим малое сопротивление поверхностному трению, и поэтому отделяющая задний край часть 18 может плавно перемещаться в направлении, обозначенном стрелкой G на фиг.13.
Что касается обычного самонаклада для подачи листов такого типа с пневматической подачей, то в патентной публикации №2007/228640 описан самонаклад для подачи листов, снабженный механизмом обнаружения поверхности листа для управления положением крайней сверху поверхности листов, содержащихся в контейнере 11 листов.
На фиг.15А и 15В представлены чертежи, иллюстрирующие конструкцию обычного механизма обнаружения поверхности листа. Как показано на фиг.15А и 15В, механизм 49 обнаружения поверхности листов включает в себя флажок 52 датчиков обнаружения поверхности листа, первый датчик 54 поверхности листа и второй датчик 55 поверхности листа, которые включаются и выключаются поворотом флажка 52 датчиков обнаружения поверхности листа, и механизм 50 флажка датчиков. Первый датчик 54 поверхности листа и второй датчик 55 поверхности листа являются фотодетекторами и соединены с устройством управления (не показано).
В данном случае, флажок 52 датчиков обнаружения поверхности листа поддерживается поддерживающим валом 53, так что флажок 52 датчиков обнаружения поверхности листа выполнен с возможностью качания. Кроме того, флажок 52 датчиков обнаружения поверхности листа снабжен первой обнаруживающей частью 52В для защиты светоприемной части первого датчика 54 поверхности листа, второй обнаруживающей частью 52С для защиты светоприемной части второго датчика 55 поверхности листа и поддерживающей частью 52D для поддержания с возможностью вращения элемента обнаружения поверхности листа 61, описываемого ниже. Механизм флажка 52 датчиков обнаружения поверхности листа подробнее показан на фиг.15В.
Механизм 50 флажка датчиков включает в себя поддерживающий элемент 60, имеющий конец 60а, который зафиксирован с возможностью вращения внутри канала 22 всасывания, и элемент обнаружения поверхности листа 61, который поддерживается на первом конце вращающимся концом 60b поддерживающего элемента 60, а на втором конце - поддерживающей частью 52D флажка 52 датчиков обнаружения поверхности листа.
Элемент обнаружения поверхности листа 61 расположен под областью всасывания и транспортировки части 20 пневматического транспортера, параллельно листам S, уложенным в стопку на лотке 12, и с возможностью перемещения в вертикальном направлении. Расстояние между верхней поверхностью крайнего сверху листа Sa, который поднимается одновременно с подъемом элемента обнаружения поверхности листа 61, и поверхностью ленты 21 пневматической транспортировки составляет Si. Кроме того, поддерживающий элемент 60, который поддерживается с возможностью вращения внутри канала 22 всасывания, выступает из отверстий 51Н1, 51Н2 отвода, выполненных в зазоре между множеством лент 21 пневматической транспортировки в направлении ширины листов к нижней стороне области всасывания и транспортировки ленты 21 пневматической транспортировки, как показано на фиг.16А и 16В. На фиг.16А и 16В представлены виды снизу ленты 21 пневматической транспортировки.
Поддерживающий элемент 60, флажок 52 датчиков обнаружения поверхности листа и элемент обнаружения поверхности листа 61 расположены в одну линию, как показано на фиг.16В. Таким образом, даже если лист упирается в любое место в продольном направлении элемента обнаружения поверхности листа 61, элемент обнаружения поверхности листа 61 способен перемещаться вертикально, сохраняя при этом свое параллельное положение (горизонтальное положение) и качая флажок 52 датчиков обнаружения поверхности листа.
Далее будет описана операция управления поверхностью листа на основе обнаружения механизмом 49 обнаружения поверхности листа, имеющим вышеописанную конструкцию.
Когда листы, содержащиеся в контейнере 11 листов, поднимаются за счет подъема лотка 12, верхняя поверхность крайнего сверху листа Sa упирается в элемент обнаружения поверхности листа 61. Затем, когда лоток 12 поднимается дальше, элемент обнаружения поверхности листа 61 поднимается вместе с крайним сверху листом Sa. Когда элемент обнаружения поверхности листа 61 поднят, флажок 52 датчиков обнаружения поверхности листа качает поддерживающая часть 52D вверх вокруг поддерживающего вала 53 как своего центра.
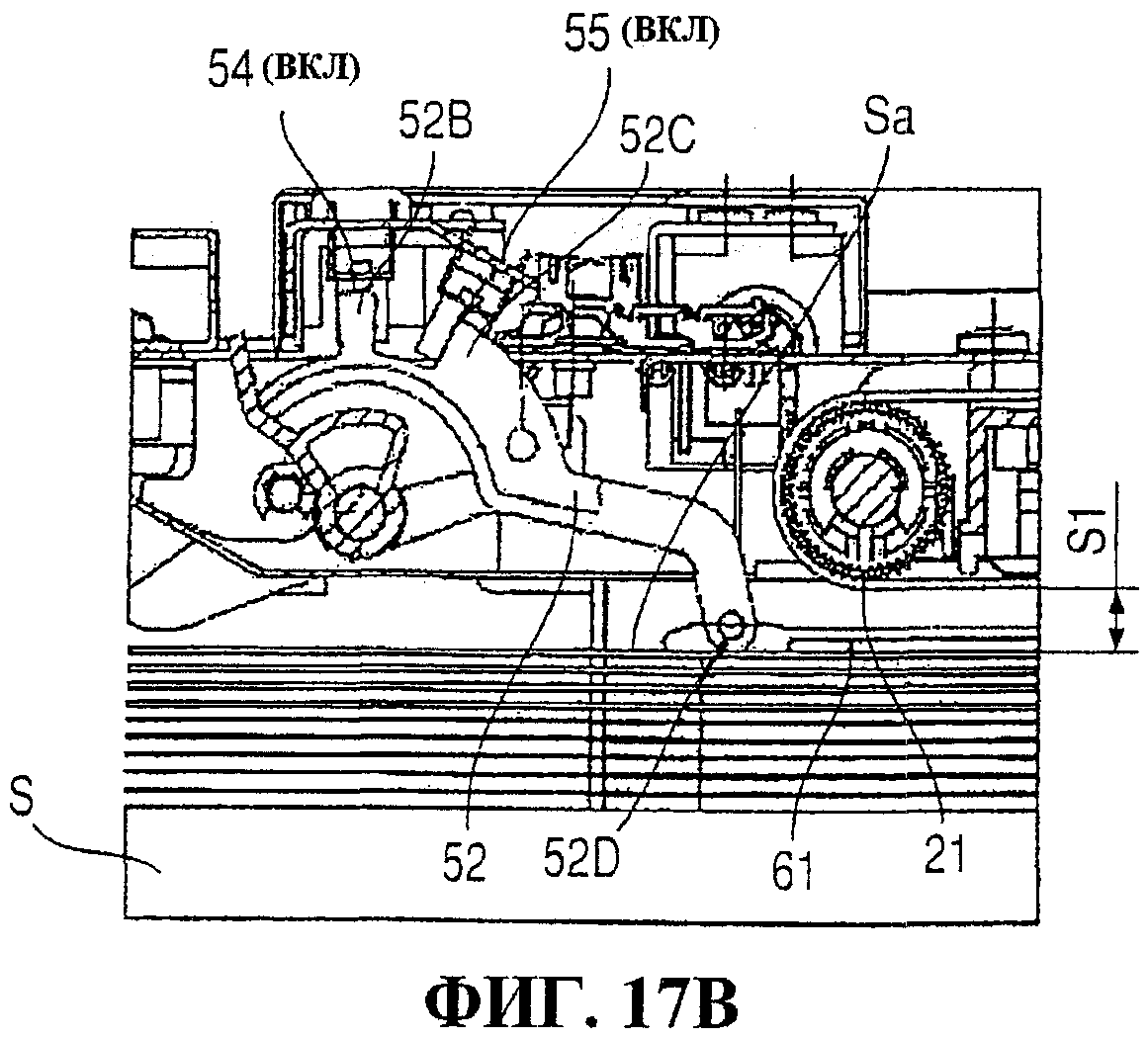
По истечении заданного количества времени (зависящего от скорости подъема лотка 12 и количества листов на лотке), как показано на фиг.17А, расстояние между верхней поверхностью крайнего сверху листа Sa, который поднимается одновременно с подъемом элемента обнаружения поверхности листа 61, и поверхностью ленты 21 пневматической транспортировки становится равным S1. В этом состоянии первая обнаруживающая часть 52В флажка 52 датчиков обнаружения поверхности листа накрывает первый датчик 54 поверхности листа, а вторая обнаруживающая часть 52С накрывает второй датчик 55 поверхности листа, и поэтому выдаются сигналы ВКЛ (включения). При этом устройство управления останавливает лоток 12 на основании сигналов ВКЛ из первого датчика 54 поверхности листа и второго датчика 55 поверхности листа.
Далее, при получении сигнала начала подачи, устройство управления запускает выдувку воздуха и управляет вводом воздуха таким образом, что верхняя часть SA стопы листов выдувается кверху, как показано на фиг.17В, а лоток 12 поднимается или опускается, вследствие чего крайний сверху лист Sa выдувается кверху в заранее определенной области.
В данном случае, когда вторая обнаруживающая часть 52C флажка 52 датчиков обнаружения поверхности листа накрывает второй датчик 55 поверхности листа, выдается сигнал ВКЛ. Затем, положение, в котором второй датчик 55 поверхности листа включается, задается в качестве нижнего предела области ввода воздуха. Если сигнал ВКЛ второго датчика 55 поверхности листа не получен, а первый датчик 54 поверхности листа включен, определяется, что это положение является «слишком низким», и лоток 12 поднимается до тех пор, пока не будет получен сигнал ВКЛ.
Кроме того, как показано на фиг.18, когда расстояние между поверхностью ленты 21 пневматической транспортировки и верхней поверхностью крайнего сверху листа Sa становится меньше, чем SH, накрывание первой обнаруживающей частью 52В устраняется, и поэтому первый датчик 54 поверхности листа не генерирует сигнал ВКЛ (а вместо этого генерирует сигнал ОТКЛ (отключения)). Это положение, таким образом, задается в качестве верхнего предела области ввода воздуха. Если сигнал ВКЛ первого датчика 54 поверхности листа не получен, а второй датчик 55 поверхности листа включен, то определяется, что это положение оказывается «слишком высоким», и лоток 12 опускается до тех пор, пока не будет получен сигнал ОТКЛ.
Такая последовательность операций показана в нижеследующей таблице.
Таким образом, поднимая и опуская лоток 12 на основании сигналов от первого и второго датчиков 54 и 55 поверхности листа, можно управлять положением лотка 12 таким образом, что оно окажется положением, в котором отделять от других и транспортировать можно только крайний сверху лист Sa. Таким образом, когда лента 21 пневматической транспортировки притягивает лист, листы S можно отделять друг от друга и подавать один за другим в узел формирования изображения. Поэтому оказывается возможным достижение стабильной подачи листов.
Возможен случай, когда в концевой части листов, уложенных в стопу на лотке 12, возникает выгиб кверху на стороне выхода в направлении подачи листов. Кроме того, в этом случае, как показано на фиг.15 и описано выше, элемент обнаружения поверхности листа 61 упирается в лист с выгибом в концевой части на стороне выхода в направлении подачи листов. Затем элемент обнаружения поверхности листа 61, который упирается в лист, изменяет свое положение параллельно в вертикальном направлении, поворачивая флажок 52 датчиков обнаружения поверхности листа. Поэтому первый датчик 54 поверхности листа и второй датчик 55 поверхности листа включаются и отключаются надлежащим образом, вследствие чего и осуществляется вышеупомянутое управление поверхностью листа.
Иными словами, управление подъемом и опусканием лотка 12 осуществляется таким образом, что надлежащий уровень (надлежащее расстояние между лентой 21 пневматической транспортировки и верхней поверхностью листа) S1 получается в положении, где элемент обнаружения поверхности листа 61 упирается в лист. Кроме того, поскольку верхняя поверхность листа контролируется на упомянутом надлежащем уровне таким образом, и поэтому между концевой частью листа и лентой 21 пневматической транспортировки образуется зазор, и поэтому обеспечивается плавный ввод отделяющего воздуха, как показано стрелками на фиг.15А. В результате, отделяющий воздух надежно отделяет лист от других листов, и поэтому можно предотвратить подачу более одного листа или «жевание» листа.
Можно расположить флажок 52 датчиков обнаружения поверхности листа, а также первый, второй датчики 54 и 55 поверхности листов снаружи области всасывания и транспортировки ленты 21 пневматической транспортировки и на стороне входа в направлении подачи листов. И в этом случае обнаружение на стороне переднего края листа S можно осуществить надежно, вследствие чего можно надежно осуществить подачу листа S. Помимо этого первый и второй датчики 54 и 55 поверхности листа не находятся внутри канала 51 всасывания, и поэтому оказывается возможным уменьшение высоты части 20 пневматического транспортера, вследствие чего можно уменьшить габарит устройства формирования изображения в направлении высоты.
Канал 51 всасывания снабжен отверстиями 51H1 и 51H2 для заключения в них элемента обнаружения поверхности листа 61, как показано на фиг.16А и 16В и описано выше, чтобы не вызывать сопротивление транспортировке листа, когда лента 21 пневматической транспортировки продвигает крайний сверху лист. Отверстие 51H1 выполнено в канале 51 всасывания параллельно всасывающей поверхности (к которой притягивается лист) среди множества лент 21 пневматической транспортировки, а отверстие 52H1 выполнено вдоль вертикальной стенки канала 51 всасывания. Кроме того, когда лента 21 пневматической транспортировки притягивает крайний сверху лист, притянутый крайний сверху лист отводит элемент обнаружения поверхности листа 61 кверху, чтобы он оказался заключенным в отверстиях 51H1 и 51H2. Таким образом, элемент обнаружения поверхности листа 61 не выступает вниз из всасывающей поверхности ленты 21 пневматической транспортировки.
Отверстие 51H1 выполнено параллельным ленте 21 пневматической транспортировки, и поэтому отверстие 51H1 накрывается крайним сверху листом, притягиваемым лентой 21 пневматической транспортировки. Таким образом, воздух не подвержен большим утечкам из отверстия 51H1. Кроме того, часть 51H2 отверстия выполнена в направлении, перпендикулярном всасывающей поверхности ленты 21 пневматической транспортировки, а когда элемент обнаружения поверхности листа 61 заключен в канале 51 всасывания, часть 51H2 отверстия блокируется самим элементом обнаружения поверхности листа 61, и поэтому воздух не подвержен большим утечкам и через это отверстие 51H2. В результате, хотя в канале 51 всасывания выполнены отверстия 51H1 и 51H2, сила всасывания не уменьшается. Таким образом, отказ подачи листа произойти не может.
В вышеописанном обычном устройстве для обработки листов и снабженном им устройстве формирования изображения, как показано на фиг.19, элемент обнаружения поверхности листа 61 заключен внутри канала 51 всасывания в период транспортировки крайнего сверху листа Sa. Кроме того, в период, когда элемент обнаружения поверхности листа 61 заключен внутри канала 51 всасывания, невозможно контролировать уровень поверхности листа второго листа Sb.
В данном случае, поверхность листа второго листа Sb можно контролировать лишь тогда, когда задний край крайнего сверху листа Sa, транспортируемого лентой 21 пневматической транспортировки, проходит мимо элемента обнаружения поверхности листа 61, и элемент обнаружения поверхности листа 61 падает под действием собственного веса, обусловленного силой тяжести, вступая в контакт с поверхностью листа Sb.
Например, когда лист Sa формата А4 (имеющий длину 210 мм в направлении транспортировки) транспортируется лентой 21 пневматической транспортировки и проходит мимо концевой части на стороне, следующей в направлении транспортировки, элемента обнаружения поверхности листа 61 (L2=20 мм на фиг.13) и последний падает, вступая в контакт с листом Sb, необходимый период является следующим.
Предполагается, что скорость транспортировки листа ленты 21 пневматической транспортировки составляет приблизительно 1000 мм/сек. Тогда период времени, когда элемент обнаружения поверхности листа 61 падает и вступает в контакт с листом Sb, составляет (210-10)/1000, т.е. приблизительно 200 миллисекунд. Кроме того, если лист Sb выдувается кверху ниже надлежащего положения на 1 мм, падение элемента обнаружения поверхности листа 61 под действием собственного веса до вступления в контакт с верхней поверхностью листа Sb занимает приблизительно 200 миллисекунд.
Кроме того, если уровень выдувки кверху листа Sb не является надлежащим уровнем, то подъем лотка для подъема поверхности листа до надлежащего уровня занимает время. Например, в предположении, что скорость подъема лотка составляет приблизительно 0,1 мм/сек, подъем лотка до надлежащего положения занимает приблизительно 100 миллисекунд.
Иными словами, если уровень выдувки кверху листа не является надлежащим, то период времени, необходимый для контроля поверхности листа Sb, включает в себя время до тех пор, пока не окажется отмененным состояние «заключения» (housed state) элемента обнаружения поверхности листа 61, период времени для того, чтобы элемент обнаружения поверхности листа 61 оказался способным обнаруживать, и период времени до тех пор, пока лист Sb не окажется выдутым кверху до надлежащего уровня. Иными словами, чтобы проконтролировать поверхность листа Sb, уровень выдувки кверху которого не является надлежащим, нужно приблизительно 320 миллисекунд (т.е. приблизительно 200 миллисекунд + приблизительно 20 миллисекунд + приблизительно 100 миллисекунд).
В данном случае, предполагается, что самонаклад для подачи листов выполнен с возможностью обычной подачи 120 листов формата А4 в минуту. Тогда время на лист составляет приблизительно 500 миллисекунд. Однако, если контроль поверхности листа, принадлежащей листу Sb, занимает приблизительно 320 миллисекунд, производительность снижается от приблизительно 120 листов в минуту (приблизительно 500 миллисекунд на лист) до приблизительно 71 листа в минуту (приблизительно 820 миллисекунд на лист). Кроме того, чем больше длина содержащегося листа, тем продолжительнее период времени для «заключения» элемента обнаружения поверхности листа 61. Следовательно, если используются листы формата А3 или большего, то количество пропускаемых листов дополнительно снижается.
Краткое изложение существа изобретения
Поэтому данное изобретение было сделано ввиду вышеупомянутой ситуации, сложившейся в настоящее время, и желательно разработать устройство формирования изображения, выполненное с возможностью подачи листов через него с приемлемой пропускной способностью листов.
В соответствии с данным изобретением предложен самонаклад (103) для подачи листов, сконфигурированный подавать листы, причем самонаклад для подачи листов содержит: лоток (12) для поддержания стопы листов (S), поднимающее и опускающее средство (М1) для подъема и опускания лотка (12), средство управления (200) для управления поднимающим и опускающим средством (М1) и выдувающее воздух средство (30) для выдувки воздуха на конец стопы листов (S), чтобы вызвать отделение верхнего листа (Sa) стопы листов и подъем со стопы листов при использовании, пневматический транспортер (20) для притягивания и транспортировки верхнего листа (Sa), отделяемого и поднимаемого воздухом, который выдувается выдувающим воздух средством (30), и первое средство (49) обнаружения, сконфигурированное обнаруживать верхнюю поверхность верхнего листа (Sa), причем средство (200) управления сконфигурировано управлять поднимающим и опускающим средством (М1) на основе выходного сигнала, выдаваемого первым средством (49) обнаружения, таким образом, что при использовании верхний лист (Sa) стопы листов располагается в диапазоне транспортировки, в котором пневматический транспортер (20) обеспечивает транспортировку верхнего - в текущий момент - листа (Sa), характеризующийся тем, что самонаклад (103) для подачи листов дополнительно содержит второе средство (56) обнаружения для обнаружения верхней поверхности части заднего конца стопы листов (S), причем управляющее средство дополнительно сконфигурировано управлять поднимающим и опускающим средством (М1) в ответ на выходной сигнал второго средства (56) обнаружения, таким образом, что, когда второе средство (56) обнаружения обнаруживает, что верхняя поверхность стопы листов (S) ниже, чем заранее определенный уровень (ЭТАЛОННЫЙ УРОВЕНЬ), поднимающее и опускающее средство способно поднимать лоток (12) до тех пор, пока верхняя поверхность стопы листов не окажется вышеупомянутого заранее определенного уровня.
В качестве второго аспекта изобретения предложено устройство формирования изображения, включающее в себя упомянутый самонаклад для подачи листов.
Дополнительные признаки данного изобретения станут очевидными из нижеследующего описания возможных вариантов осуществления со ссылками на прилагаемые чертежи.
Краткое описание чертежей
На фиг.1 представлен чертеж, иллюстрирующий схематическую конструкцию принтера в качестве примера устройства формирования изображения в соответствии с вариантом осуществления данного изобретения.
На фиг.2 представлен чертеж, иллюстрирующий конструкцию самонаклада для подачи листов в устройстве формирования изображения, изображенном на фиг.1.
На фиг.3 показана блок-схема управления самонакладом для подачи листов, предусмотренным в устройстве формирования изображения, показанном на фиг.1.
На фиг.4 показан первый чертеж, иллюстрирующий операцию подачи листа самонакладом для подачи листов, предусмотренным в устройстве формирования изображения, показанно на фиг.1.
На фиг.5А и 5В представлены второй и третий чертежи, иллюстрирующие операцию подачи листа самонакладом для подачи листов, предусмотренным в устройстве формирования изображения, показанном на фиг.1.
На фиг.6А и 6В представлены чертежи, иллюстрирующие подробности лотка и регулирующей задний край части, предусмотренных в самонакладе для подачи листов, предусмотренном в устройстве формирования изображения, показанном на фиг.1.
На фиг.7 представлен чертеж, иллюстрирующий конструкцию механизма обнаружения поверхности листа, который предусмотрен в самонакладе для подачи листов, предусмотренном в устройстве формирования изображения, показанном на фиг.1.
На фиг.8 представлена блок-схема управления подъемом и опусканием лотка, предусмотренного в устройстве формирования изображения, показанном на фиг.1.
На фиг.9А и 9В представлены чертежи, иллюстрирующие состояния во время операции подачи листа самонакладом для подачи листов, предусмотренным в устройстве формирования изображения, показанном на фиг.1.
На фиг.10А и 10В представлены чертежи, иллюстрирующие управление поверхностью листа самонакладом для подачи листов, предусмотренным в устройстве формирования изображения, показанном на фиг.1.
На фиг.11 представлен чертеж, иллюстрирующий отключенное состояние датчика заднего края поверхности листа, предусмотренного в самонакладе для подачи листов устройства формирования изображения, показанного на фиг.1.
На фиг.12 представлена блок-схема управления подъемом и опусканием лотка, предусмотренного в устройстве формирования изображения, показанном на фиг.1.
На фиг.13 представлен чертеж, иллюстрирующий конструкцию самонаклада для подачи листов, предусмотренного в обычном устройстве формирования изображения.
На фиг.14 представлен вид в плане, иллюстрирующий подробности контейнера листов самонаклада для подачи листов, показанного на фиг.13.
На фиг.15А и 15В представлена первая пара чертежей, иллюстрирующая конструкцию механизма обнаружения поверхности листа самонаклада для подачи листов, показанного на фиг.13.
На фиг.16А и 16В представлена вторая пара чертежей, иллюстрирующая конструкцию механизма обнаружения поверхности листа самонаклада для подачи листов, показанного на фиг.13.
На фиг.17А и 17В представлены первые чертежи, иллюстрирующие операцию управления поверхностью листа самонакладом для подачи листов, показанным на фиг.13.
На фиг.18 представлен второй чертеж, иллюстрирующий операцию управления поверхностью листа, осуществляемую самонакладом для подачи листов, показанным на фиг.13.
На фиг.19 представлен третий чертеж, иллюстрирующий операцию управления поверхностью листа, осуществляемую самонакладом для подачи листов, показанным на фиг.13.
Подробное описание изобретения
Ниже, со ссылками на прилагаемые чертежи, приводится подробное описание возможного варианта осуществления изобретения.
На фиг.1 представлен чертеж, иллюстрирующий схематическую конструкцию принтера в качестве примера устройства формирования изображения, снабженного самонакладом для подачи листов, в соответствии с вариантом осуществления изобретения.
На фиг.1 показано, что в верхней части основного корпуса 101 принтера, имеющегося в принтере 100, предусмотрена сканирующая изображение часть 130 для сканирования оригинала D, который размещен на стекле 120а опорного столика в качестве столика для размещения оригинала с помощью автоподатчика 120 автоматической подачи оригинала. Кроме того, под сканирующей изображение частью 130 предусмотрены формирующая изображение часть 102 и самонаклад 103 для подачи листов S в формирующую изображение часть 102.
В данном случае, формирующая изображение часть 102 включает в себя светочувствительный барабан 112, проявочное устройство 113 и блок 111 лазерного сканирования. Кроме того, самонаклад 103 для подачи листов включает в себя множество контейнеров 11 листов и лент 21 пневматической транспортировки, служащих в качестве подающих лент. В контейнерах 11 листов содержатся листы S, например диапозитивы диаскопического проектора (ДДП), и контейнеры 11 листов прикреплены с возможностью открепления к основному корпусу 101 принтера. Подающая лента является примером узла подачи листов, конфигурация которого обеспечивает подачу листов S, содержащихся в контейнере 11 листов, в формирующую изображение часть 102.
Ниже будет описана операция формирования изображения, осуществляемая принтером 100, имеющим вышеописанную конструкцию.
Сканирующая изображение часть 130 сканирует изображение, когда устройство управления (показанное на фиг.3, описанной ниже), заключенное в корпусе 101 устройства, выдает сигнал сканирования изображения в сканирующую изображение часть 130. Затем блок 111 лазерного сканирования излучает лазерный луч в соответствии с электрическим сигналом отсканированного изображения, облучая им светочувствительный барабан 112. В данном случае, светочувствительный барабан 112 заранее заряжен, и посредством облучения лазерным лучом формируется электростатическое скрытое (латентное) изображение. Затем проявочное устройство 113 проявляет электростатическое скрытое изображение, чтобы сформировать изображение из тонера на светочувствительном барабане 112.
Лист S подается из контейнера 11 листов в другом месте, когда устройство управления выдает сигнал подачи листа в самонаклад 103 для подачи листов. Затем регистрирующий ролик 117 транспортирует подаваемый лист S в переносящую часть синхронно с изображением из тонера на светочувствительный барабан 112. Переносящая часть образована светочувствительным барабаном 112 и электризатором 118 переноса.
Затем изображение из тонера переносится на лист S, транспортируемый в переносящую часть, и лист транспортируется в фиксирующую часть 114. Затем фиксирующая часть 114 нагревает лист S и подвергает его воздействию давления, чтобы навсегда зафиксировать незафиксированное перенесенное изображение на лист S. Отводящий ролик 116 выпускает лист, на который перенесено изображение, из основного корпуса 101 принтера в разгрузочный лоток 118. Синхронизацией устройства формирования изображения управляет устройство 200 управления.
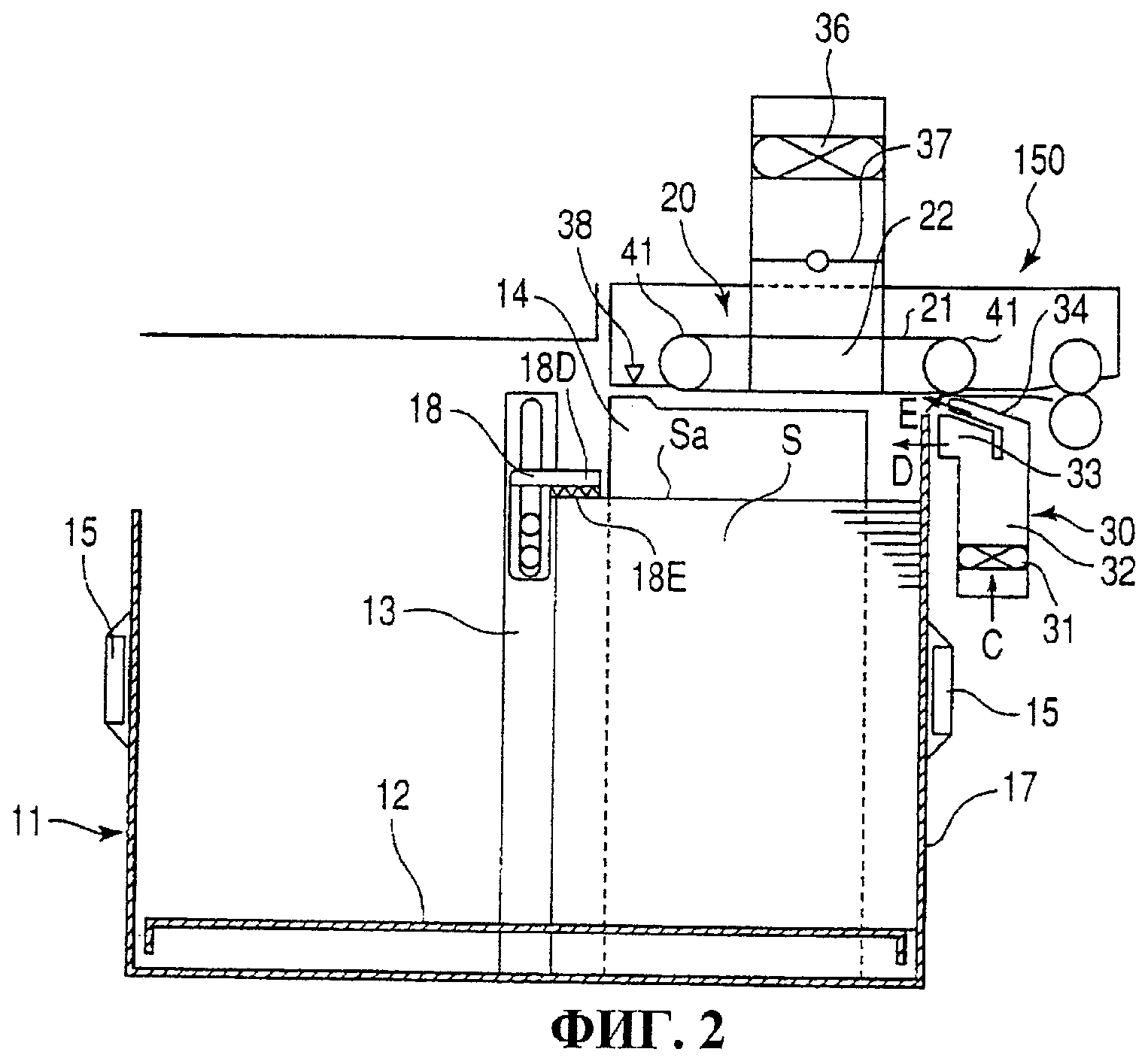
Фиг.2 иллюстрирует конструкцию самонаклада 103 для подачи листов. Позиции на фиг.2, являющиеся такими же, как те, которые указаны на вышеупомянутой фиг.13, обозначают те же самые или соответственные детали.
Контейнер 11 листов включает в себя лоток 12, который является поднимаемым и опускаемым, пластину 13 регулирования заднего края, пластину 17 регулирования переднего края и пластины 14 регулирования боковых краев, которые регулируют положение в направлении ширины, перпендикулярном направлению подачи листов S. Положение пластины 13 регулирования заднего края и положения пластин 14 регулирования боковых краев можно изменять в соответствии с типоразмером листа, заключенного в контейнере. Кроме того, пластина 13 регулирования заднего края упирается в задние края листов на предшествующей стороне в направлении транспортировки листов, и на пластине 13 регулирования заднего края предусмотрена отделяющая задний край часть 18. Эта отделяющая задний край часть 18 регулирует положение части заднего края крайнего сверху листа Sa, причем упомянутая часть заднего края находится на предшествующей стороне в направлении подачи листов. Отделяющая задний край часть 18 выполнена с возможностью перемещения в вертикальном направлении.
Контейнер 11 листов можно вытаскивать из основного корпуса 101 принтера по направляющим 15 скольжения. Когда контейнер 11 листов вытаскивают из основного корпуса 101 принтера, лоток 12 опускается в заданное положение, вследствие чего можно добавлять или заменять листы. Лоток 12 поднимается и опускается с помощью шагового двигателя или серводвигателя постоянного тока, и можно опускать лоток 12, повторяя шаговую операцию чередования между перемещениями в течение заранее определенного периода и оставляя лоток в вертикальном положении в течение заранее определенного периода.
Кроме того, над контейнером 11 листов расположен механизм подачи листов (именуемый механизмом 150 пневматической подачи листов) системы подачи листов с пневматическим управлением, конфигурация которого обеспечивает отделение и подачу листов одного за другим. Механизм 150 пневматической подачи листов включает в себя часть 20 пневматического транспортера, которая транспортирует лист S, уложенный в стопе на лотке 12, прикладывая всасывание к листу S, и выдувающую воздух часть 30, которая выдувает воздух на верхнюю часть стопки листов на лотке, тем самым отделяя листы S один за другим.
В данном случае, часть 20 пневматического транспортера включает в себя ленту 21 пневматической транспортировки, которая пропускается над роликами 41 привода ленты и которая транспортирует лист S вправо на фиг.2, прикладывая всасывание к листам S. Часть пневматического транспортера 20 также включает в себя всасывающий вентилятор 36, который создает отрицательное давление, чтобы увлекать лист S вверх к ленте 20 пневматической транспортировки, и канал 22 всасывания, который расположен внутри ленты 21 пневматической транспортировки и который используется для всасывания воздуха через всасывающие отверстия (не показаны), выполненные в ленте 21 пневматической транспортировки.
Часть 20 пневматического транспортера дополнительно включает в себя заслонку 37 канала всасывания, которая расположена между всасывающим вентилятором 36 и каналом 22 всасывания для включения и выключения операции всасывания, осуществляемой лентой 21 пневматической транспортировки. В этом варианте осуществления множество лент 21 пневматической транспортировки расположены на заранее определенных интервалах в направлении ширины, причем направление ширины перпендикулярно направлению транспортировки бумаги и в типичном случае соответствует более узкому размеру прямоугольных листов. Поэтому множество лент 21 пневматической транспортировки можно выровнять бок о бок.
Выдувающая воздух часть 30 включает в себя разрыхляющее 33 (для «отслаивания» листов друг от друга) и отделяющее сопло 34 (для отделения листов друг от друга с помощью зазора воздуха). Разрыхляющее сопло 33 и отделяющее сопло 34 сконфигурированы выдувать воздух на верхнюю часть уложенных листов S. Выдувающая воздух часть 30 дополнительно включает в себя отделяющий вентилятор 31 и канал 32 отделения, причем последний обеспечивает подачу воздуха от отделяющего вентилятора 31 к разрыхляющему соплу 33 и отделяющему соплу 34.
Таким образом, часть воздуха, который всасывается (т.е. принуждается течь) в направлении, обозначенном стрелкой С, с помощью отделяющего вентилятора 31, проходит через канал 32 отделения, и эта порция воздуха выдувается в направлении, обозначенном стрелкой D, через разрыхляющее сопло 33, поднимая несколько листов в верхней части листов S, уложенных в стопу на лотке 12. Остальной воздух, вводимый в выдувающую воздух часть 30, выдувается в направлении, обозначенном стрелкой Е, через отделяющее сопло 34, и этот остальной воздух отделяет листы, поднимаемые разрыхляющим соплом 33, один за другим и позволяет ленте 21 пневматической транспортировки приложить всасывание к листу, чтобы притянуть его к ленте пневматической транспортировки.
На фиг.3 представлена блок-схема управления самонакладом для подачи листов. Устройство 200 управления соединено с датчиком заднего края поверхности листа, имеющим конфигурацию, обеспечивающую обнаружение поверхности заднего края листа, а также с первым датчиком 54 поверхности листа и вторым датчиком 55 поверхности листа, которые предусмотрены в механизме обнаружения поверхности листа, описываемом ниже. Кроме того, устройство 200 управления соединено с электродвигателем М1 привода подъема и опускания лотка, сконфигурированным для подъема и опускания лотка 12, электродвигателем М2 привода ленты пневматической транспортировки, сконфигурированным приводить в движение ленту 21 пневматической транспортировки, и соленоидом SL заслонки, конфигурация которого обеспечивает поворот заслонки 37 канала всасывания. Помимо этого устройство 200 управления соединено с всасывающим вентилятором 36, конфигурация которого обеспечивает создание отрицательного давления для затягивания листа на ленту 21 пневматической транспортировки, и отделяющим вентилятором 31, конфигурация которого обеспечивает выдувку воздуха к листу.
Далее будет описана операция подачи листа, осуществляемая самонакладом 103 для подачи листов (механизмом 150 пневматической подачи листов), имеющим вышеупомянутую конструкцию.
Сначала пользователь вытаскивает контейнер 11 листов, чтобы уложить листы S на лотке 12. После этого пользователь задвигает контейнер 11 листов в заранее определенное положение, как показано на фиг.2. Затем, как показано на фиг.3, устройство 200 управления возбуждает электродвигатель М1 привода подъема и опускания лотка. Таким образом, как показано на фиг.4, лоток 12 поднимается в направлении, обозначенном стрелкой А. Когда расстояние между лентой 21 пневматической транспортировки и крайним сверху листом Sa уменьшается до расстояния В, лоток достиг положения, обеспечивающего подачу листа, в котором лист может быть подан, и устройство 200 управления останавливает лоток 12 в этом положении. Тогда устройство 200 управления готово обнаружить сигнал подачи листа для начала подачи листа.
Затем, когда устройство 200 управления обнаруживает сигнал подачи листа, устройство 200 управления активирует отделяющий вентилятор 31 для всасывания воздуха в направлении, обозначенном стрелкой С, как показано на Фиг.5А. Этот воздух проходит через канал 32 отделения, и воздух выдувается из разрыхляющего сопла 33 и отделяющего сопла 34 в направлениях, обозначенных стрелками D и Е соответственно, к стопе листов. Вследствие этого несколько листов в верхней части стопы листов поднимаются и отделяются выдуваемым воздухом. Устройство 200 управления также активирует всасывающий вентилятор 36 для выдачи воздуха в качестве выхлопного воздуха в направлении, обозначенном стрелкой F на фиг.5А. В этот момент заслонка 37 канала всасывания по-прежнему закрыта, так что воздух не продувается через ленту 21 транспортировки, а вместо того в пространстве между вентилятором 36 и заслонкой 37 создается отрицательное давление.
Когда после обнаружения сигнала подачи листа проходит заранее определенное время, так что подъем верхнего листа Sa стабилизируется, устройство 200 управления возбуждает соленоид SL, вследствие чего заслонка 37 канала всасывания поворачивается в направлении, обозначенном стрелкой G, как показано на фиг.5В. Поворот заслонки 37 канала всасывания вызывает открывание прохода через заслонку 37. Таким образом, через всасывающие отверстия, предусмотренные в ленте 21 пневматической транспортировки, создается всасывающая сила в направлении, обозначенном стрелкой Н. Сочетание этой всасывающей силы Н и отделяющего воздуха Е из отделяющего сопла 34 позволяет притянуть только крайний сверху лист на ленту 21 пневматической транспортировки.
Затем устройство 200 управления возбуждает электродвигатель М2 привода ленты пневматической транспортировки, показанный на фиг.3, и - как показано на фиг.5В - ролик 41 привода ленты вращается в направлении, обозначенном стрелками J. В результате, крайний сверху лист Sa транспортируется в направлении, обозначенном стрелкой K, в состояние, в котором крайний сверху лист Sa поднимается на ленту 21 пневматической транспортировки. Затем крайний сверху лист Sa транспортируется к формирующей изображение части парой подающих роликов 42, вращающихся в направлениях, обозначенных стрелками L и M.
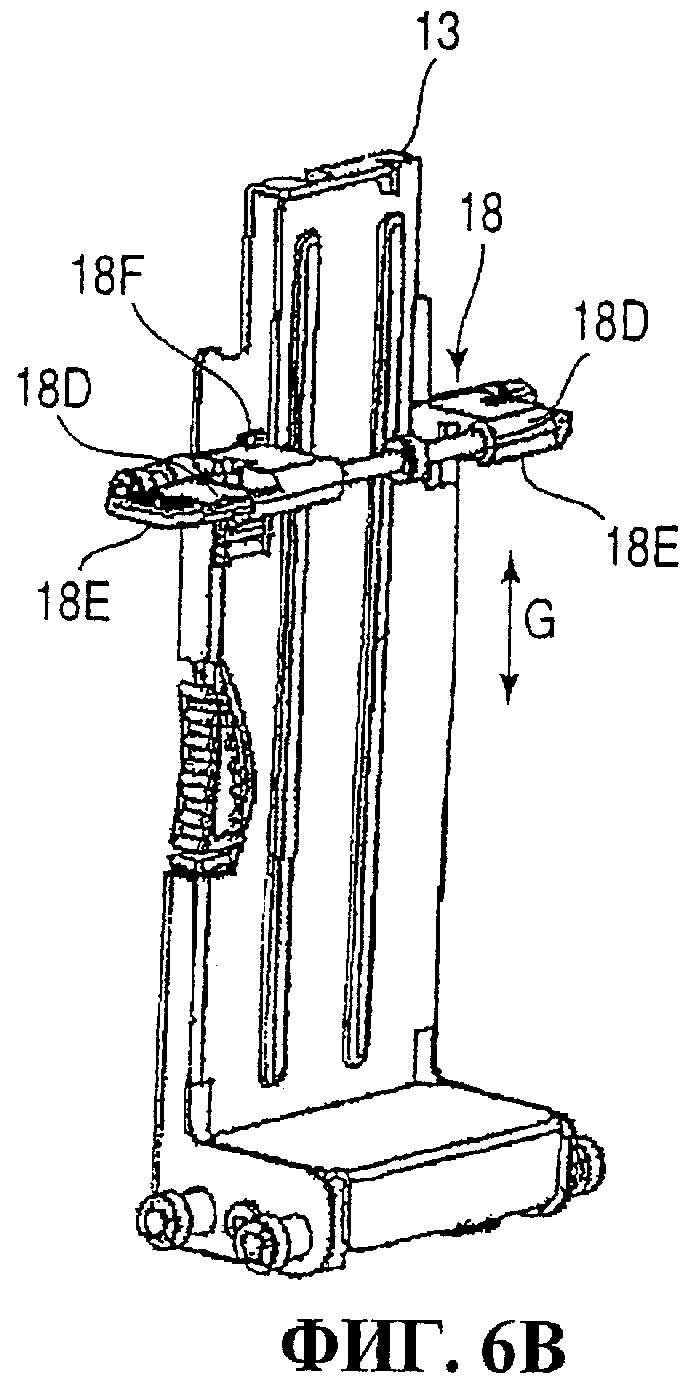
На фиг.6А и 6В представлены чертежи, иллюстрирующие подробности лотка 12 и регулирующей задний край части 13. Регулирующая задний край часть 13 включает в себя отделяющую задний край часть 18. Отделяющая задний край часть 18 (показанная на фиг.6В) включает в себя вышеупомянутый выступ 18D, способствующий отделению лист 18Е, выполненный из металла, имеющего большой коэффициент трения, и ползун 18F, который удерживает выступ 18D и способствующий отделению лист 18Е и выполнен с возможностью скольжения в направлении, обозначенном стрелкой G. Поскольку ползун 18F скользит вдоль длины регулирующей задний край части 13, отделяющая задний край часть 18 (включающая в себя выступ 18D и лист 18Е) может подниматься и опускаться вместе с крайним сверху листом, гарантированно следуя движению верхней поверхности крайнего сверху листа.
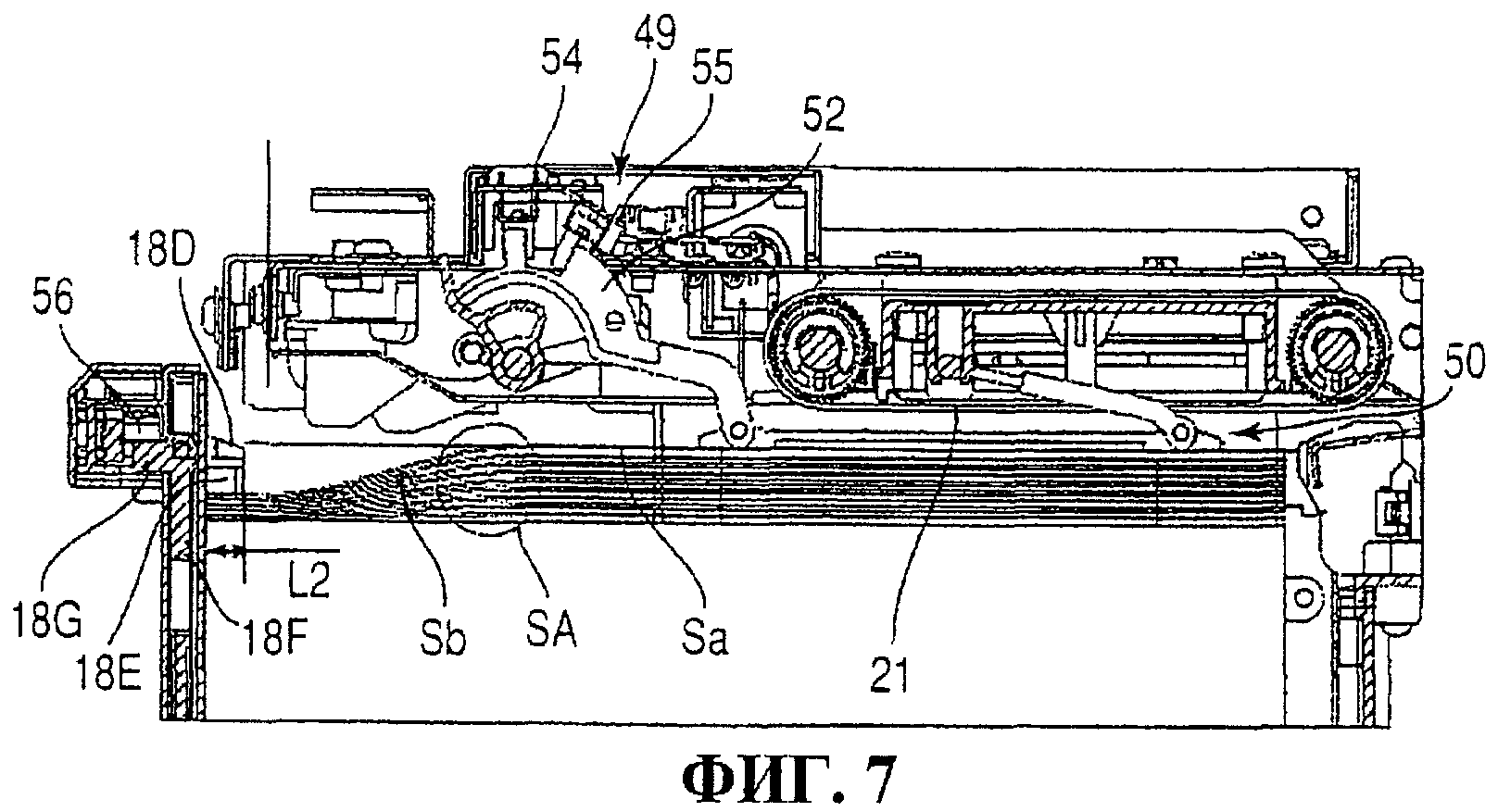
Кроме того, как показано на фиг.7, ползун 18F отделяющей задний край части 18 снабжен флажком 18G датчика обнаружения заднего края поверхности листа. Датчик 56 заднего края поверхности листа, предусмотренного в регулирующей задний край части 13, включается и выключается на основании положения флажка 18G датчика обнаружения заднего края поверхности листа.
Как будет описано далее, листы подаются один за другим таким образом, что положение верхней поверхности стопы листов эффективно понижается, потому что все меньше и меньше листов остаются на лотке 12. Когда положение верхней поверхности крайнего сверху в текущий момент листа становится ниже отрегулированного диапазона (т.е. когда высота стопы снижается, становясь меньше заранее определенной высоты или порога), датчик 56 заднего края поверхности листа отключатся флажком 18G датчика обнаружения заднего края поверхности листа, который опускается при снижении положения верхней поверхности стопы листов. В этом варианте осуществления регулирующая задний край часть 13 снабжена датчиком 56 заднего края поверхности листа (который является второй частью обнаружения поверхности листа), конфигурация которого обеспечивает обнаружение предшествующей части (в направлении подачи листов) верхней поверхности листа, крайнего сверху в текущий момент, среди листов, поднимаемых выдуваемым воздухом. Когда предыдущий крайний сверху лист транспортируется из пачки листов S, лист, крайний сверху в текущий момент, является вторым листом и поэтому - еще и листом, который обнаруживается второй частью обнаружения поверхности листа 56. Вследствие этого можно использовать листы, имеющие разные длины в направлении транспортировки листов, поскольку измеряется верхняя поверхность предыдущего листа (при этом неважно, какова длина листа), а не положение переднего или заднего края. Поскольку листы любой длины имеют верхнюю поверхность, которую можно обнаружить, можно использовать листы разной длины в одной и той же транспортирующей системе.
В этом варианте осуществления, как показано на фиг.7, механизм 49 обнаружения поверхности листа расположен над лотком, при этом механизм 49 обнаружения поверхности листа включает в себя флажок 52 датчиков обнаружения поверхности листа, первый датчик 54 поверхности листа, второй датчик 55 поверхности листа и механизм 50 флажка датчиков. Устройство 200 управления согласно фиг.3, описанное выше, осуществляет управление подъемом и опусканием лотка 12 на основании включенного и отключенного состояний первого и второго датчиков 54 и 55 поверхности листа и датчика 56 заднего края поверхности листа. Эти три датчика являются частью механизма 49 обнаружения поверхности листа, который представляет собой «первую часть обнаружения поверхности листа», конфигурация которой обеспечивает обнаружение верхней поверхности крайнего сверху листа среди листов, поднимаемых выдуваемым воздухом. Первый датчик 54 поверхности листа обнаруживает, ниже ли положение крайнего сверху листа, чем надлежащий диапазон, в пределах которого часть 20 пневматического транспортера может приложить всасывание к листу, как описано выше. Второй датчик 55 поверхности листа обнаруживает, выше ли положение крайнего сверху листа, чем тот же надлежащий диапазон. Датчики 54 и 55 поверхности листа совместно определяют, находится ли крайний сверху (или верхний) лист в пределах упомянутого надлежащего диапазона.
Далее, со ссылками на блок-схему, изображенную на фиг.8, будет описано управление подъемом и опусканием лотка 12 в соответствии с этим вариантом осуществления.
При получении сигнала начала подачи устройство 200 управления начинает подготовку к подаче. Прежде всего запускается вращение отделяющего вентилятора 31 и начинается выдувка воздуха, а листы поднимаются выдуваемым воздухом. После этого, на основании сигнала включения или отключения от первого датчика 54 поверхности листа и второго датчика 55 поверхности листа, осуществляется возбуждение электродвигателя М1 привода подъема и опускания лотка, вследствие чего лоток 12 поднимается и опускается.
Затем, если включение первого и второго датчиков 54 и 55 поверхности листа не обусловлено (например, потому что не принят соответствующий сигнал) («Нет» на S20), лоток 12 поднимается и опускается (этап S21) надлежащим образом, как описано выше. Если включение первого и второго датчиков 54 и 55 поверхности листа обусловлено (например, принят соответствующий сигнал) («Да» на S20), то начинается подача листов (S22).
Когда начинается подача листов, крайний сверху лист Sa притягивается кверху и подается лентой 21 пневматической транспортировки. После этого, когда крайний сверху лист Sa подается на длину L2 (как показано на фиг.7) или более, отделяющая задний край часть 18 падает таким образом, что нижняя поверхность способствующего отделению листа 18Е упирается в поверхность следующего листа Sb.
Происходит подача крайнего сверху листа Sa, и положение этого крайнего сверху листа понижается, так что флажок 18G датчика обнаружения заднего края поверхности листа тоже падает. Вскоре после этого датчик 56 заднего края поверхности листа прекращает обнаружение флажка 18G датчика обнаружения заднего края поверхности листа, и происходит отключение датчика 56 заднего края поверхности листа. Иными словами, когда листы подаются так, что верхняя поверхность листа, крайнего сверху в текущий момент, падает ниже эталонного уровня, датчик 56 заднего края поверхности листа выдает сигнал ОТКЛ (отключения), который является сигналом обнаружения, указывающим, что крайний сверху лист среди поднимаемых воздухом листов, оказывается ниже эталонного уровня. Датчик 56 заднего края поверхности листа определяет, находится ли крайний сверху (или верхний) лист выше эталонного уровня.
В данном случае сигнал ОТКЛ выдается, как описано выше, когда крайний сверху лист Sa проходит отделяющую задний край часть 18. По этой причине механизм обнаружения поверхности листа 49 обнаруживает крайний сверху лист Sa. Вместе с тем, в этом варианте осуществления, даже если механизм обнаружения поверхности листа 49 обнаруживает крайний сверху лист Sa, лоток 12 поднимается, когда датчик 56 заднего края поверхности листа оказывается отключенным. Иными словами, если датчик 56 заднего края поверхности листа включен, лоток поднимается независимо от сигнала от части обнаружения поверхности листа.
Далее, после подъема лотка 12 таким образом, определяют, обуславливается ли включение датчика 56 заднего края поверхности листа (этап S23). Если датчик 56 заднего края поверхности листа не включается («Нет» на S23), то определяют, что лоток 12 «располагается слишком низко», и лоток 12 поднимается до тех пор, пока не будет получен сигнал ВКЛ (включения) (S24).
Расстояние, на которое сторона заднего края листа может подняться с помощью выдуваемого воздуха, в некоторой степени ограничена массой отделяющей задний край части 18. Следовательно, сторона листов, на которой находится задний край, располагается ниже, чем сторона, на которой находится передний край, когда лист поднимается с помощью выдуваемого воздуха. Надлежащий диапазон, определяемый посредством обнаружения с помощью датчиков 54 и 55 поверхности листа, находится в положении, которое в направлении высоты отличается от эталонного уровня, определяемого посредством обнаружения с помощью датчика 56 заднего края поверхности листа. Эталонный уровень задан ниже, чем надлежащий диапазон.
Таким образом, если происходит подача листа, вследствие чего уровень крайнего сверху листа снижается, это обнаруживается датчиком 56 заднего края поверхности листа раньше, чем механизмом обнаружения поверхности листа 49. Когда лента 21 пневматической транспортировки поднимает крайний сверху лист, поднимаемый лист отводит элемент обнаружения поверхности листа 61 кверху, вследствие чего тот оказывается заключенным в отверстиях 51H1 и 51H2. Следовательно, когда лента 21 пневматической транспортировки транспортирует крайний сверху лист, механизм обнаружения поверхности листа 49 не обнаруживает последующий лист Sb. Однако вскоре после того, как часть заднего края листа проходит мимо датчика 56 заднего края поверхности листа, этот датчик 56 заднего края поверхности листа может обнаружить последующий лист Sb. Датчик 56 заднего края поверхности листа обнаруживает последующий лист Sb раньше, чем механизм обнаружения поверхности листа 49.
Следовательно, если управление подъемом лотка 12 осуществляется на основании сигнала из датчика 56 заднего края поверхности листа, то лоток 12 можно поднимать и останавливать раньше без необходимости внесения последующих поправок, и поэтому пропускная способность самонаклада для подачи листов оптимизируется. Когда подъем лотка 12 начинается на основании сигнала от датчика 56 заднего края поверхности листа, управление лотком 12 и его подъем осуществляются на основании величины подъема, которая задана заранее на основании такой информации, как толщина листа, вследствие чего и происходит подъем лотка 12.
Механизм обнаружения поверхности листа 49 проверяет, поднялся ли передний край крайнего сверху листа выдуваемым воздухом до положения в пределах заранее определенного диапазона, когда лента 21 пневматической транспортировки не транспортирует лист.
Следовательно, если датчик 56 заднего края поверхности листа включен («Да» на S23), то затем определяют, находится ли положение крайнего сверху листа в надлежащем диапазоне, на основании сигнала из второго датчика 55 поверхности листа. Если второй датчик 55 поверхности листа не включен («Нет» на S25), то происходит подъем лотка 12 (S26) до тех пор, пока не включится второй датчик 55 поверхности листа («Да» на S25).
Далее, если поверхность листа на стороне переднего края выходит из заранее определенной области несмотря на сигнал ВКЛ, получаемый от датчика 56 заднего края поверхности листа, т.е. если второй датчик 55 поверхности листа отключен («Нет» на S25), то происходит подъем лотка 12 (S26). Однако и в этом случае лоток 12 (крайний сверху лист) уже поднят до уровня, который позволяет выдачу сигнала ВКЛ датчиком 56 заднего края поверхности листа, вследствие чего это не занимает столько времени, что это могло бы оказать влияние на пропускную способность.
Затем, когда второй датчик 55 поверхности листа включается («Да» на S25), лоток 12 останавливается (S27), после чего начинается подача листов (S28). Если на лотке 12 уложены в стопу N листов, то вышеупомянутое управление повторяется до тех пор, пока не происходит подача N-го листа. Когда произойдет подача N-го листа («Да» на S29), операция подачи прекращается.
Таким образом, в этом варианте осуществления, если датчик 56 заднего края поверхности листа обнаруживает, что крайний сверху лист оказывается ниже эталонного уровня, когда этот лист проходит мимо него, то осуществляется управление лотком 12 с целью его подъема. Таким образом, можно подавать любое количество листов, не снижая пропускную способность листов.
Далее, если заимствуется эта конструкция, то достаточно, чтобы датчик 56 заднего края поверхности листа обнаруживал, по меньшей мере, состояние, в котором крайний сверху лист «располагается слишком низко», когда происходит последовательная подача листов. После этого, когда крайний сверху лист больше не «располагается слишком низко», можно автоматически прекратить подъем лотка. Следовательно, конструкцию можно сделать проще, чем та, которая включает в себя механизм обнаружения поверхности листа 49, за счет включения в состав только датчика 56 заднего края поверхности листа. В результате, можно без проблем разместить датчик 56 заднего края поверхности листа в пределах регулирующей задний край части.
Кроме того, чтобы расположить крайний сверху лист в пределах подходящего диапазона, можно предусмотреть множество датчиков 56 заднего края поверхности листа, вследствие чего возможно переключение положений обнаружения для генерирования сигналов неудовлетворительности уровней и осуществление управления уровнем поверхности листа части заднего края посредством множества положений. Таким образом, конструкции применимы к случаю, в котором существует зависящая от различных масс или типоразмеров листов разность между уровнем поверхности листа на стороне переднего края и уровнем поверхности листа на стороне заднего края. Поэтому можно достичь более стабильного состояния листов, поднимаемых выдуваемым воздухом, и при этом можно предотвратить возникновение подачи более одного листа или «жевания» листа.
Состояние выдувки воздуха, разрыхляющего листы, или воздуха, отделяющего листы, может изменяться за время, в пределах которого лента пневматической транспортировки поднимает крайний сверху лист, или в течение очень короткого времени между моментом, когда начинается подача крайнего сверху листа, и моментом, когда отделяющая задний край часть 18 упирается в поверхность следующего листа. Поэтому, если состояние выдувки изменяется таким образом, то на стороне, где находится передний край, или стороне, где находится задний край, происходит нарушение состояния листов, в котором они подняты и отделены. В результате, отделение листов друг от друга может оказаться неудовлетворительным, приводя к подаче более одного листа или «жеванию» листа. Помимо этого состояние поднятия и отделения листов может нарушаться в зависимости от характеристик листа, приводя к той же самой проблеме.
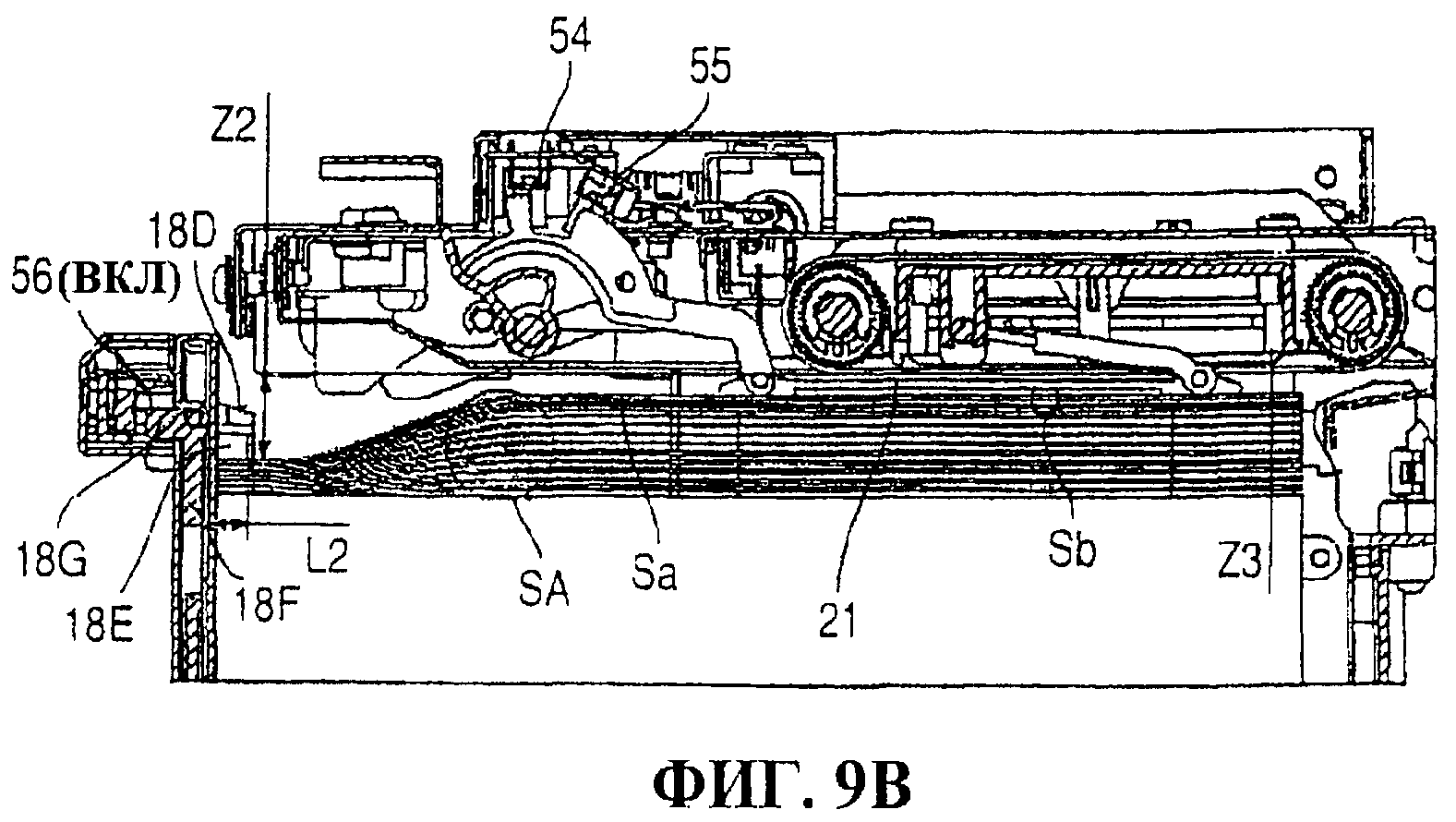
На фиг.9А и 9В представлены чертежи, иллюстрирующие лист, поднимаемый выдуваемым воздухом и подаваемый в устройство формирования изображения. Фиг.9А иллюстрирует желательное состояние листа, который транспортируется, а фиг.9В иллюстрирует нежелательное состояние листа, который транспортируется.
В предпочтительном состоянии листов, проиллюстрированном на фиг.9А, обуславливается включение датчика 56 заднего края поверхности листа, и лоток (не показан) останавливается. В этом случае расстояние между лентой 21 пневматической транспортировки и стороной переднего края крайнего сверху листа Sa составляет Z1, в то время как расстояние между стороной заднего края крайнего сверху листа Sa и лентой 21 пневматической транспортировки составляет Z2. Стопа SA листов поднимается выдуваемым воздухом, по существу, равномерно, и поэтому отделение происходит надлежащим образом. Кроме того, расстояние между лентой 21 пневматической транспортировки и крайним сверху листом Sa постоянно, и поэтому отделяющий воздух попадает между крайним сверху листом Sa и непосредственно следующим листом Sb после подъема крайнего сверху листа Sa. Таким образом можно предотвратить подачу более одного листа за раз.
В нежелательном состоянии, проиллюстрированном на фиг.9В, положение заднего края крайнего сверху листа Sa не отличается от его положения на фиг.9А. Хотя расстояние между лентой 21 пневматической транспортировки и стороной заднего края крайнего сверху листа также составляет Z2, расстояние между стороной переднего края крайнего сверху листа Sa и лентой 21 пневматической транспортировки составляет Z3, что меньше, чем Zl. Помимо этого крайний сверху лист Sa поднимается вместе с непосредственно следующим листом Sb в виде пачки листов. В этом состоянии отделение листов друг от друга может стать неудовлетворительным, вследствие чего может произойти подача более одного листа. Даже если и можно получить равномерное отделение листов в этом состоянии, отделяющий воздух не может должным образом попасть между листами, потому что расстояние Z3 на стороне переднего края слишком мало. Следовательно, может увеличиться вероятность подачи более одного листа.
Такое нежелательное состояние возникает в случае, когда лист относится к типу толстых листов и обладает, например, меньшей гибкостью. Иными словами, если лист является толстым и имеет меньшую гибкость, то разность между Z2 и Z1 (или Z2 и Z3) не такая большая, как показано на фиг.9А и 9В, когда лист отделяется и поднимается выдуваемым воздухом. В результате, тонкий слой воздуха образуется между листами также на стороне, где находится задний конец. С другой стороны, ввиду удаления от стороны переднего края разрыхляющий воздух, поддерживающий приподнятое состояние, не попадает очень далеко между листами. Поэтому в горизонтальном направлении может возникнуть небольшая вибрация.
В этом состоянии датчик 56 заднего края поверхности листа может часто включаться и выключаться. Тогда, вместо позиционирования переднего края надлежащим образом, лоток может избыточно подниматься в зависимости от результата обнаружения поверхности листа на стороне, где находится задний край.
Кроме того, если лист имеет толщину приблизительно 0,1 мм или менее и если датчик 56 заднего края поверхности листа имеет погрешность приблизительно 1 мм как накопленное значение погрешностей размеров компонентов, входящих в состав датчика 56 заднего края поверхности листа, то выдуваемый воздух может поднимать десять или более листов в виде пачки листов. Таким образом, очень важным является учет факторов погрешностей размеров компонентов системы подъема и транспортировки листа.
Помимо этого, даже если погрешности размеров компонентов контролируются, тонкий лист естественным образом легко отсоединяется благодаря характеристикам (например, малой массе) тонкого листа. Если листы разрыхляются больше, чем первоначально прогнозировалось, и при этом происходит подача листов, то листы могут оказаться в состоянии, в котором датчик 56 заднего края поверхности листа претерпевает неупорядоченные включения и выключения. В этом случае необязательный подъем лотка тоже может происходить аналогично случаю толстого листа, а его влияние еще больше, чем в случае толстого листа. В случае тонкого листа количество листов, поднимаемых в виде пачки листов, может увеличиваться, и может происходить подача более одного листа или «жевание» листа.
Чтобы предотвратить вышеописанные риски в этом варианте осуществления, когда заканчивается лимит времени после начала транспортировки листов, т.е. после проверки положения поверхности листа, лоток 12 останавливается. В данном случае фиг.10А и 10В иллюстрируют изменение в положении поверхности листа на стороне заднего края листа и сигнал датчика 56 заднего края поверхности листа в случае, когда лоток 12 останавливается после истечения времени с начала подачи листа.
Фиг.10А и 10В иллюстрируют обычное управление выдуваемым воздухом, а фиг.10В иллюстрирует случай управления в соответствии с этим вариантом осуществления. При обычном управлении, проиллюстрированном на фиг.10А, когда операция подачи листов начинается таким образом, что первый лист, второй лист, а затем и третий лист подаются в устройство формирования изображения, поверхность остальных листов постепенно опускается до эталонного уровня. На фиг.10А количества листов показаны как целые числа от 1 до 7. Когда подача третьего листа завершается, а отделяющая задний край часть вступает в контакт с поверхностью четвертого листа, эта поверхность четвертого листа располагается ниже, чем эталонный уровень. В этот момент сигнал из датчика 56 заднего края поверхности листа изменяется с ВКЛ на ОТКЛ, как показано на нижнем графике фиг.10А. Конечно, эталонный уровень может быть после любого заранее определенного уменьшения высоты уровня стопы (а значит - и после подачи любого количества листов, а не именно трех).
Когда сигнал из датчика 56 заднего края поверхности листа изменяется таким образом, начинается подъем лотка 12, так что четвертый лист оказывается на том же уровне, где был первый лист в начале подачи листов. Вместе с тем, поскольку лист находится в состоянии, где он поднимается с поверхности лотка под действием выдуваемого воздуха между листами, поверхность листа не поднимается одновременно с началом подъема лотка 12. Между подъемом лотка и листов, поднимаемых выдуваемым воздухом, имеется задержка из-за воздушной подушки между сжимаемыми листами. Подъем лотка 12 сначала вызывает изменение толщины воздушной подушки на стороне переднего края.
Состояния выдувки (т.е. давления воздуха) воздуха, разрыхляющего листы, и воздуха, отделяющего листы, изменяются ввиду изменения толщин воздушных подушек и сопротивления в потоке воздуха. Это вызывает начало подъема поверхности листа после истечения времени задержки. Следовательно, даже если сигнал из датчика 56 заднего края поверхности листа изменяется с ОТКЛ на ВКЛ, так что лоток после этого останавливается, поверхность листа продолжает подниматься в течение короткого времени, зависящего от потоков D, E воздуха от вентилятора 31, вводящего воздух.
Этот подъем поверхности листа лотком может вызывать нарушение воздушной подушки под листом после того, как часть заднего края листа проходит мимо датчика 56 заднего края поверхности листа. Это нарушение воздушной подушки под листом исчезает, по существу, мгновенно, и поверхность листа восстанавливается, оказываясь выше, чем эталонный уровень. Следовательно, по сути, нет необходимости поднимать лоток 12 настолько, насколько он действительно поднимается, а сигнал из датчика 56 заднего края поверхности листа может изменяться с ВКЛ на ОТКЛ, если воздушная подушка нарушена. Затем, если сигнал из датчика 56 заднего края поверхности листа изменяется, лоток 12 уже поднят к моменту этого изменения и - потенциально - оказался слишком высоко.
Например, как показано на фиг.10А, когда лоток 12 поднимается, четвертый лист оказывается на том же уровне, где был первый лист, и подается в устройство подачи или транспортировки. Затем начинается подача пятого листа. В этот момент, если нарушение воздушной подушки происходит двукратно, сигнал от датчика 56 заднего края поверхности листа также изменяется дважды. Затем, если такое изменение сигнала происходит дважды, отклонение от исходного уровня поверхности листа становится равным R2 на фиг.10A, что выше уровня, когда подача началась на R1 на фиг.10A. Если уровень поверхности листа становится слишком высоким, может произойти подача более одного листа или может возникнуть другая неисправность. Такое нарушение в воздушной подушке между листами возникает неожиданно, в зависимости от типа или состояния листов.
В отличие от этого, в данном варианте осуществления, когда происходит транспортировка четвертого листа, лоток 12 останавливается в положении, где четвертый лист ниже, чем первый лист, так что, по меньшей мере, четвертый лист может быть поднят и оттранспортирован в момент, когда сигнал из датчика 56 заднего края поверхности листа изменяется на ВКЛ. Иными словами, после того как сигнал от датчика 56 заднего края поверхности листа изменяется на ОТКЛ, так что лоток 12 поднимается, лоток 12 останавливается, когда истекает лимит времени, даже если датчик 56 заднего края поверхности листа не изменяет сигнал на ВКЛ. Этот лимит времени составляет, например, время, необходимое для подъема четвертого листа в положение, которое ниже, чем положение первого листа, так что, по меньшей мере, четвертый лист может быть поднят и оттранспортирован, как показано на фиг.10В.
Таким образом, на стадии замены третьего листа четвертым листом, лоток 12 остановлен в положении, где всасывать и транспортировать можно, по меньшей мере, четвертый лист, обеспечивая задержанный подъем остальных листов, обуславливаемый сжатием воздушных подушек между листами. К моменту, когда четвертый лист уже оттранспортирован, пятый лист имеет уравненный уровень своей воздушной подушки и тоже готов к транспортировке. Таким образом, влияние нарушения воздушных подушек можно снизить. Иными словами, датчик 56 заднего края поверхности листа в определенной степени корректирует датчик 49 переднего края поверхности листа.
В дополнительном примере, как показано на фиг.10В, если воздушная подушка дважды нарушается аналогично случаю согласно фиг.10А после замены на пятый лист, лоток поднимается при первом нарушении аналогично случаю согласно фиг.10А. Однако, если сигнал из датчика 56 заднего края поверхности листа изменяется с ОТКЛ на ВКЛ, лоток 12 останавливается, так что величина подъема поверхности листа ограничивается. Таким образом, отклонением уровня от первоначального уровня поверхности листа можно управлять так, чтобы оно составляло R4 на фиг.10В. Кроме того, лоток 12 не поднимается при втором нарушении, потому что лоток 122 достиг верхнего предела величины подъема при первом нарушении. В результате, управление лотком 12 осуществляется так, что он оказывается в положении ниже того уровня, когда началась подача R3 на фиг.10В. В качестве максимального уровня возможно перемещение лотка 12 в положение, которое является таким же, как то, при котором начиналась подача.
Таким образом, необязательный подъем лотка 12 предотвращается за счет ограничения величины подъема лотка 12 после переключения датчика 56 заднего края поверхности листа в положение ОТКЛ, а лоток 12 движется вверх. Это состояние ОТКЛ датчика 56 заднего края поверхности листа изображено на фиг.11.
Это ограничение величины подъема осуществляется для каждого из листов. Иными словами, ограничение величины подъема временно подавляется, когда управляемый объект заменяется следующим листом. Таким образом, можно осуществить оптимальное управление для каждого листа. В данном случае управление «одним из листов» можно определить, как период времени между моментами начала вращения ленты пневматической транспортировки для подачи первого листа и следующего листа. Кроме того, его можно также определить как период времени между сигналами ВКЛ из первого и второго датчиков 54 и 55 поверхности листа, которые являются ближайшими к области всасывания, получаемой за счет подачи листа, или период времени между моментами начала активации соленоида SL заслонки канала всасывания, сконфигурированного поворачивать заслонку 37 канала всасывания.
Далее, управление подъемом и опусканием лотка 12 будет описано со ссылками на блок-схему, изображенную на фиг.12.
Когда происходит прием сигнала начала подачи, устройство 200 управления начинает подготовку к подаче. Прежде всего, запускается вращение отделяющего вентилятора 31 и начинается выдувка воздуха, а листы поднимаются разделяющими их воздушными подушками. После этого, если первый датчик 54 поверхности листа или второй датчик 55 поверхности листа не включены («Нет» на S31), лоток 12 поднимается и опускается (S32) так, как это требуется. Когда первый и второй датчики 54 и 55 поверхности листа включаются («Да» на S31), начинается подача листа (S33).
Затем, когда начинается подача листов, крайний сверху лист Sa поднимается вверх и подается лентой 21 пневматической транспортировки. После этого, когда лист Sa подается на длину L2 (как показано на фиг.7) или более, отделяющая задний край часть 18 падает, так что нижняя поверхность способствующего отделению листа 18Е упирается в поверхность следующего листа Sb.
Когда отделяющая задний край часть 18 падает каждый раз при подаче крайнего сверху листа Sa, вместе с ней опускается и флажок 18G датчика обнаружения заднего края поверхности листа. Вскоре после этого датчик 56 заднего края поверхности листа прекращает обнаружение флажка 18G датчика обнаружения заднего края поверхности листа, и происходит отключение датчика 56 заднего края поверхности листа. Когда датчик 56 заднего края поверхности листа отключается, лоток 12 поднимается.
Затем определяют, включился ли снова датчик 56 заднего края поверхности листа. Если датчик 56 заднего края поверхности листа еще отключен, то определяется, что уровень еще «слишком низок», и лоток 12 поднимается.
После этого или попеременно с этим определяют, включен ли датчик 56 заднего края поверхности листа или истек ли лимит времени с начала подачи листов (S34). В данном случае, если датчик 56 заднего края поверхности листа не включен или если не истек лимит времени с начала подачи листов («Нет» на S34), лоток 12 продолжает подниматься (S35).
После этого, когда включится датчик 56 заднего края поверхности листа или истечет лимит времени с начала подачи листов («Да» на этапе S34), лоток 12 останавливается (этап S36). Когда лоток 12 останавливается в этот момент, лист поднимается и останавливается в положении, где оказались возможными подъем и транспортировка первого листа, как показано, например, на фиг.10В. Таким образом, оказывается возможной подача листа. Кроме того, за счет прекращения действия подъема лотка 12 с тем, чтобы ограничить суммарную величину подъема лотка 12, можно предотвратить слишком высокий подъем лотка 12, даже если датчик 56 заднего края поверхности листа после этого часто повторяет ОТКЛ и ВКЛ.
Когда после этого начинается подача листа, управление положением крайнего сверху листа осуществляется на основании датчика 56 заднего края поверхности листа. Поэтому механизму обнаружения поверхности листа 49 достаточно обнаружить поверхность листа на стороне переднего края, чтобы проверить, поднялся ли крайний сверху лист с помощью выдуваемого воздуха в заранее определенную область.
Следовательно, если датчик 56 заднего края поверхности листа включен, то тогда определяется, находится ли положение крайнего сверху листа на эталонном уровне (для крайнего сверху листа, поднимаемого и транспортируемого лентой 21 пневматической транспортировки), на основании сигнала из второго датчика 55 поверхности листа. Иными словами, если второй датчик 55 поверхности листа не включен («Нет» на S37), лоток 12 поднимается (S38) до тех пор, пока второй датчик 55 поверхности листа не включится («Да» на S37).
Кроме того, если поверхность листа на стороне переднего края оказывается вне заранее определенной области несмотря на сигнал ВКЛ, получаемый от датчика 56 заднего края поверхности листа, т.е. если второй датчик 55 поверхности листа отключен («Нет» на этапе S37), лоток 12 поднимается (этап S38). Вместе с тем, и в этом случае лоток 12 (а значит - и крайний сверху лист) уже поднят до уровня, который позволяет выдачу сигнала ВКЛ датчиком 56 заднего края поверхности листа, вследствие чего подъем листа не занимает так много времени, что могло бы повлиять на пропускную способность.
Далее, когда второй датчик 55 поверхности листа включается («Да» на этапе S37), лоток 12 останавливается (этап S39), а после этого начинается подача листов (этап S40). Если на лотке 12 уложены в стопу (поддерживаются) N листов, то вышеупомянутое управление повторяется до тех пор, пока не подан N-й лист. Когда подан N-й лист («Да» на этапе S41), операция подачи прекращается.
Таким образом, в этом варианте осуществления ненужный подъем лотка 12 предотвращается путем прекращения подъема лотка 12, когда датчик 56 заднего края поверхности листа отключается, как показано на фиг.11. Помимо этого, за счет ограничения величины подъема, ненужный подъем лотка 12 не проводится даже в случае, если датчик 56 заднего края поверхности листа часто переключается между состояниями ОТКЛ и ВКЛ. Таким образом, можно достичь состояния равновесия в воздушных подушках между листами.
Лимит времени, в течение которого лоток 12 поднимается, можно подсчитывать, например, с помощью таймера. Желательно, чтобы этот лимит времени был задан равным значению, позволяющему реализовать оптимальное уравновешенное состояние воздушных подушек, зависящее от типа, исходного веса и размера листов, и мог быть изменен во время процесса подачи листов. В этом варианте осуществления лимит времени задается равным 40 мс в случае тонких листов и 100 мс в случае толстых листов.
Кроме того, величину подъема лотка 12 ограничивают на основании времени, подсчитываемого таймером, или аналогичного параметра (устройства), указанного в вышеизложенном описании, но это не является ограничительным признаком данного изобретения. Например, для принятия решения по ограничению можно контролировать величину вращения (количество импульсов) электродвигателя М1 привода подъема и опускания лотка или угол вращения. Кроме того, ограничение величины подъема нужно осуществлять так, чтобы не снижалась пропускная способность листов и достигалось состояние равновесия листов, плавающих на соответствующих воздушных подушках. Если трудно достичь одновременно и пропускной способности, и состояния равновесия, то следует проводить точную настройку в соответствии с типом, основной массой, размером и т.д. листов.
Кроме того, самонаклад 103 для подачи листов согласно данному изобретению можно использовать для устройства формирования изображения, имеющего формирующую изображение часть 102 и устройство для обработки листов, конфигурация которого обеспечивает обработку листов, на которых формирующей изображение частью 102 сформированы изображения.
Хотя данное изобретение описано со ссылками на возможные варианты осуществления, должно быть ясно, что изобретение ограничивается не описанными возможными вариантами осуществления, а объемом притязаний нижеследующей формулы изобретения.
Реферат
Изобретение относится к области полиграфии и может быть использовано в печатных машинах. Устройство формирования изображения содержит самонаклад. Самонаклад содержит лоток для поддержания стопы листов, поднимающее и опускающее средство, средство управления, выдувающее воздух средство, пневматический транспортер, первое средство обнаружения и второе средство обнаружения. Средство управления регулирует поднятие и опускание лотка. Выдувающее средство служит для отделения верхнего листа стопы. Пневматический транспортер выполнен с возможностью притягивания и транспортировки верхнего листа. Первое средство обнаружения способно обнаруживать верхнюю поверхность верхнего листа. Второе средство обнаружения способно обнаруживать верхнюю поверхность части заднего конца стопы листов. Достигается повышение пропускной способности и производительности устройства. 2 н. и 9 з.п. ф-лы, 26 ил., 1 табл.
Комментарии