Самонаклад для машины для обработки листообразного материала, как бумага, картон или пленки - RU2742017C1
Код документа: RU2742017C1
Чертежи



Описание
Изобретение касается самонаклада для машины для обработки листообразного материала, как бумага, картон или пленка.
В случае машины речь может идти о ламинирующей машине, которая наносит покрывной материал, например полимерную пленку, на основу (подложку) и жестко соединяет их друг с другом. В случае машины речь также может идти, например, о машине для изготовления гофрокартона. Но также являются допустимыми и другие примеры применения.
Самонаклад служит для того, чтобы захватывать из стопы подготовленных листов соответственно самый верхний и удалять из стопы в направлении укладки (накладки) листов, так что упомянутый самый верхний лист затем может подвергаться дальнейшей обработке.
Из уровня техники для этой цели известный вакуумные захваты, которые поступательно сверху устанавливаются на самый верхний лист в стопе и затем вертикально поднимают его из стопы. После этого поднятый из стопы лист захватывается другими захватами и линейно перемещается далее в направлении укладки листов.
Задача изобретения состоит в том, чтобы создать более простой в своей конструкции устройство.
Для решения этой задачи в соответствии с изобретением предусмотрен самонаклад, с приводным валом, который проходит по существу перпендикулярно направлению укладки листов и снабжен по меньшей мере одним вакуумным захватом, который вращается над листообразным материалом, когда приводной вал приводится в действие, причем вакуумный захват выполнен с возможностью перестановки между неактивным положением, в котором он не взаимодействует с листообразным материалом, и активным положением, в котором он воздействует на верхнюю сторону листообразного материала и может захватывать его с собой. Изобретение основывается на основной идее, которая объединяет две известные из уровня техники компоненты движения (а именно горизонтальную и вертикальную) в одно единственное плавающее движение. Для этой цели вакуумный захват вращается над стопой листообразного материала, причем он на протяжении подходящего участка своей траектории движения воздействует на самый верхний лист стопы, приподнимает его и захватывает с собой. Таким образом, больше не требуется передавать листы с первого устройства, которое их приподнимает, на второе устройство, которое их перемещает от стопы и смещает вперед.
Предпочтительным образом предусмотрены несколько вакуумных захватов, которые расположены в нескольких группах, которые дистанцированы друг от друга в осевом направлении приводного вала. При этом рациональное количество групп и дистанция между группами зависит от свойств подлежащих извлечению из стопы листов. При этом особенно предпочтительным является от четырех до десяти групп.
Согласно одному усовершенствованию изобретения предусмотрено, что каждая группа имеет несколько вакуумных захватов, которые в окружном направлении дистанцированы друг от друга вокруг приводного вала. Это позволяет увеличить число тактов.
Особенно предпочтительно каждая группа имеет три вакуумных захвата. В этом случае, когда вакуумный захват захватывает самый верхний лист, приподнимается его и слегка перемещается вперед, уже подводится следующий вакуумный захват.
Предпочтительно каждый вакуумный захват имеет тело и имеющее возможность перестановки относительно него вакуумную присоску, причем тело размещено на расстоянии от центральной оси приводного вала. Величина радиуса, на котором размещено тело каждого вакуумного захвата, имеет решающее влияние на то, на какое расстояние вперед может перемещаться самый верхний лист, когда соответствующий вакуумный захват воздействует на него.
Предпочтительно тела размещены с возможностью вращения относительно приводного вала, так что передняя сторона вакуумных захватов, которая воздействует на листы, может удерживаться параллельно плоскости листов в течение некоторого участка движения вакуумного захвата.
Радиус, на котором тело перемещается вокруг приводного вала, предпочтительно является варьируемым, так что вертикальная и горизонтальная компоненты движения вакуумных захватов регулируются желательным образом.
Здесь может быть предусмотрен перестановочный механизм, которым регулируется положение и ориентация вакуумных захватов относительно плоскости, в которой находятся листы. Этим перестановочным механизмом может регулироваться траектория движения вакуумных захватов так, что они несмотря на вращательное движение приводного вала перемещаются на некоторое расстояние (по меньшей мере почти) параллельно плоскости листов.
Согласно одному усовершенствованию изобретения приводная ось имеет несколько несущих штанг, которые проходят параллельно оси вращения приводного вала и на которых размещены тела вакуумных захватов. Несущие штанги позволяют переставлять одновременно с незначительными затратами все те вакуумные захваты, которые - если смотреть в окружном направлении - размещены в одном и том же положении.
Предпочтительно несущие штанги выполнены с возможностью вращения и смещения относительно приводного вала, так что как ориентация, так и радиус, на котором находятся вакуумные захваты в каждой точке своей траектории движения, могут регулироваться в желательной манере.
Предпочтительно положение и вращение несущих штанг переставляется посредством перестановочного механизма. Он согласно одному простому варианту осуществления может иметь криволинейную дорожку и кулачковый повторитель. Таким образом не требуются сервомоторы или похожие дорогие конструктивные элементы, а необходимая перестановка несущих штанг может достигаться чисто механическим путем.
Согласно одному усовершенствованию изобретения в приводной вал интегрирован по меньшей мере один пневматический канал, которым соединены вакуумные захваты. Это обеспечивает возможность направлять необходимый для активирования вакуумных захватов сжатый воздух, соответственно, пониженное давление без больших затрат.
В зависимости от реализации регулирования для пневматики и вакуумных захватов для каждой несущей штанги может быть предусмотрен собственный пневматический канал внутри приводного вала.
Согласно одному усовершенствованию изобретения предусмотрен прижим, который подходящим образом взаимодействует с находящимися в стопе листами, когда вакуумные захваты приподнимают самый верхний лист.
Изобретение далее описывается на основании варианта изобретения, который изображен на прилагаемых чертежах, которые показывают:
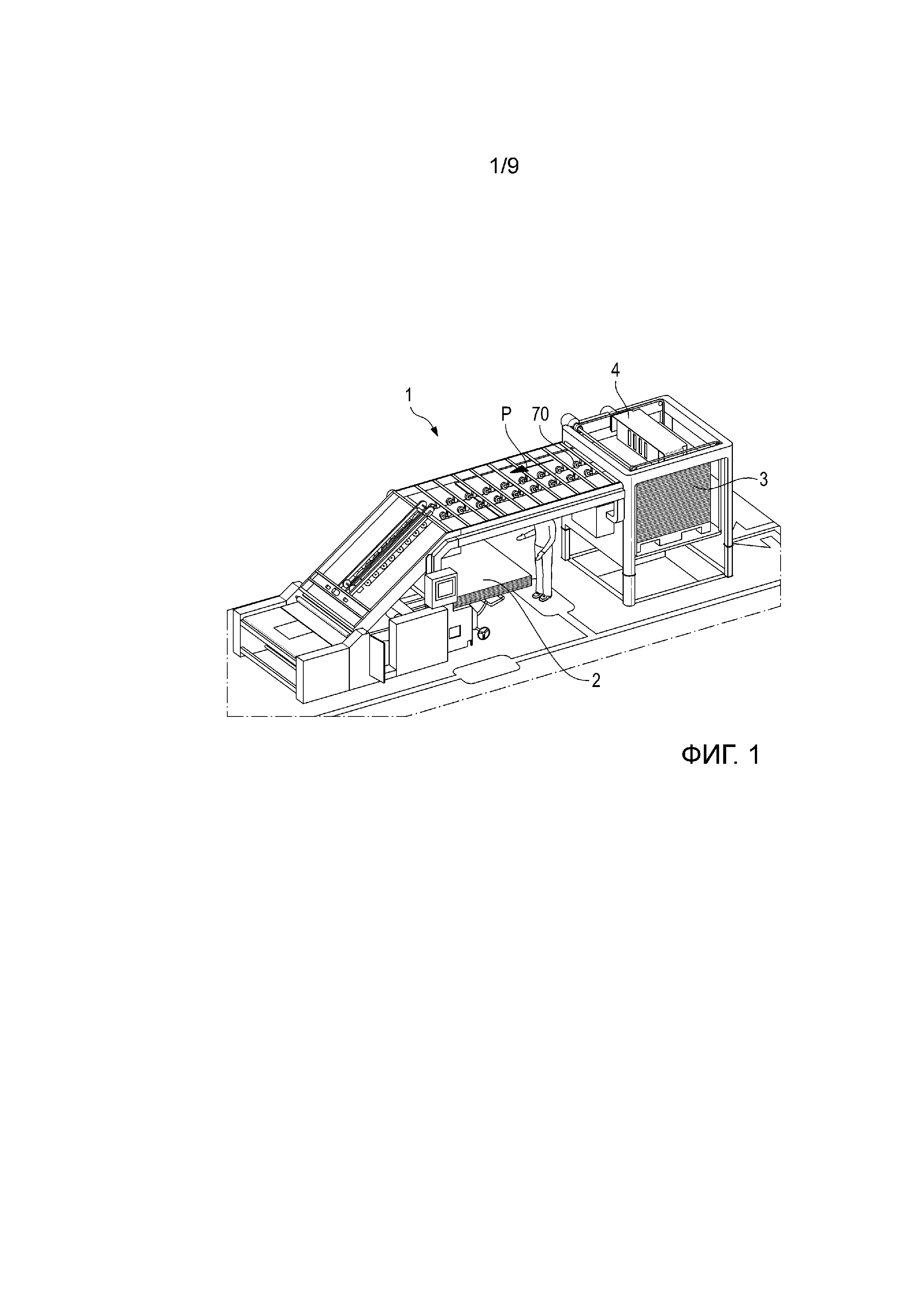
Фиг.1 схематично пример машины для обработки листообразного материала;
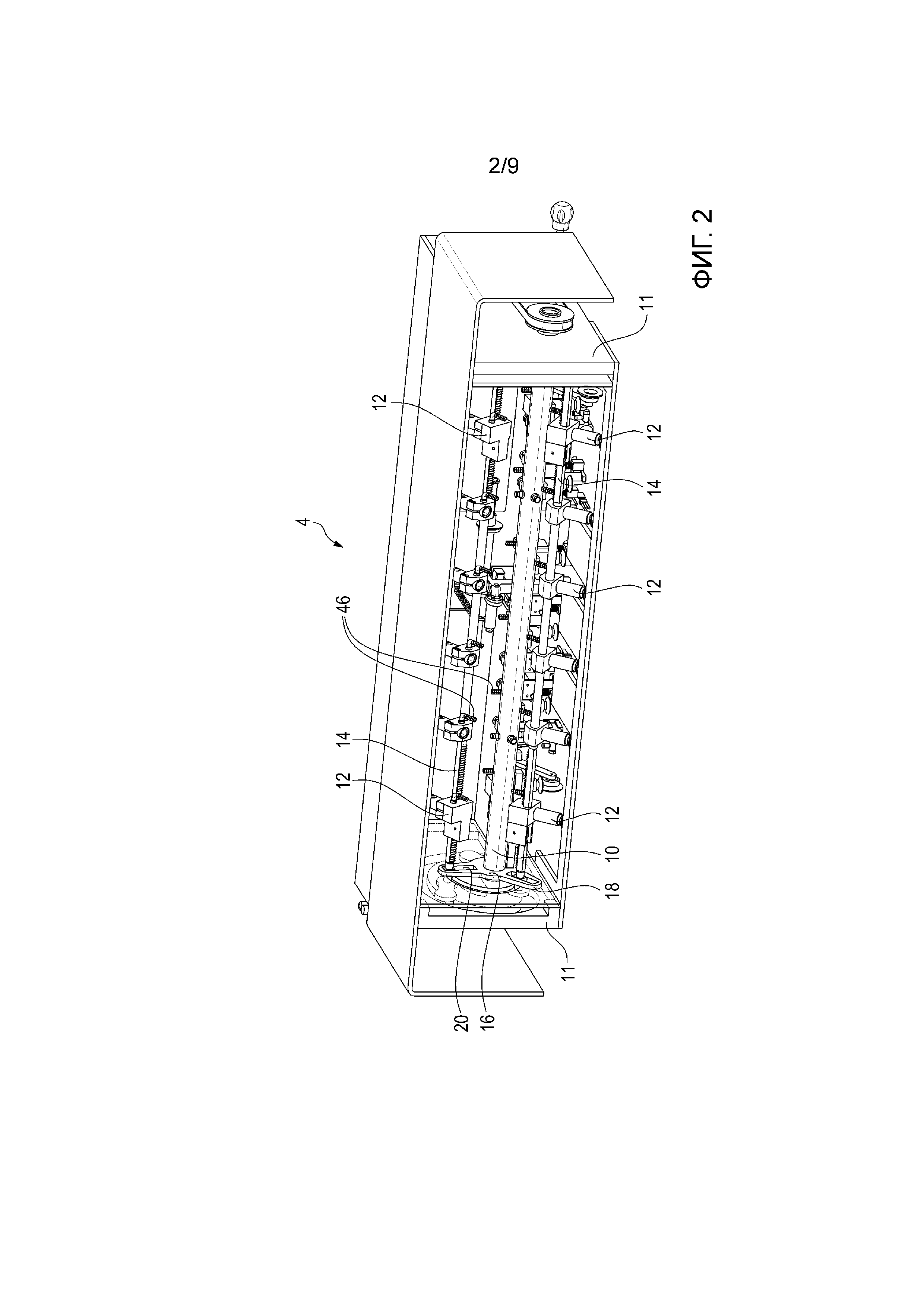
Фиг.2 в схематичном перспективном виде существенную часть самонаклада;
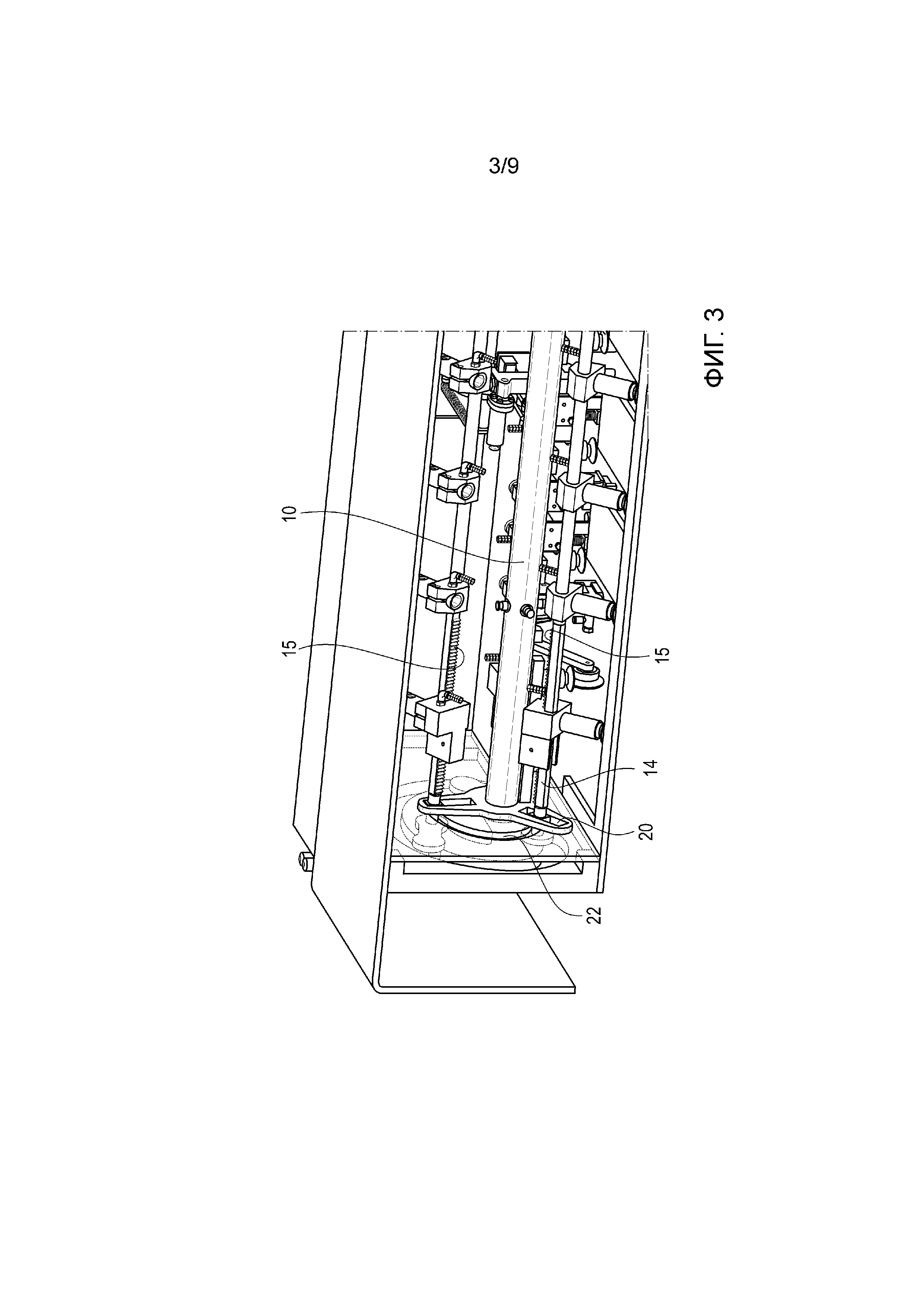
Фиг.3 в увеличенном виде часть самонаклада с фиг.2;
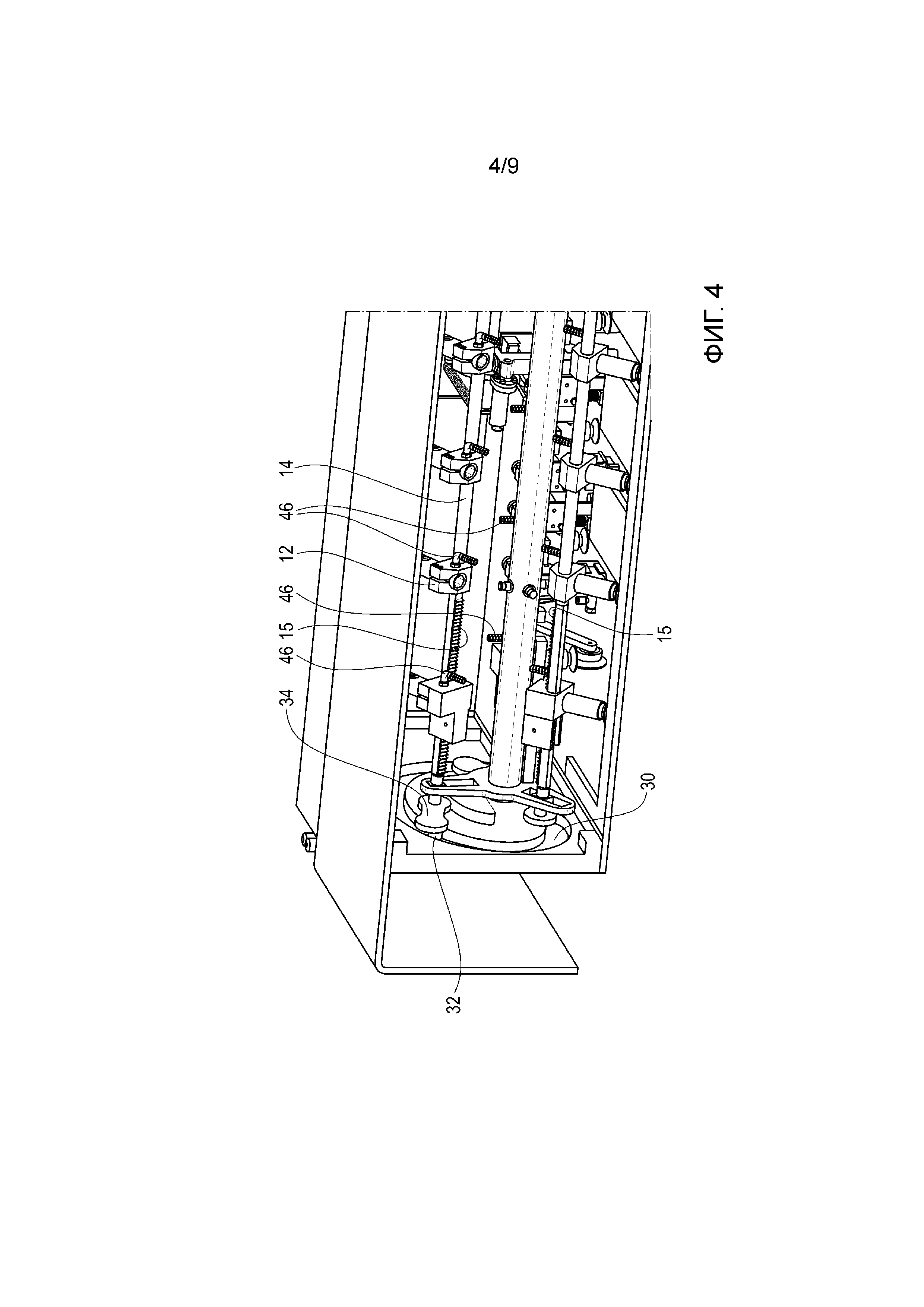
Фиг.4 изображенную на фиг.3 часть самонаклада, причем рамная часть опущена, чтобы можно было видеть лежащую за ней часть;
Фиг.5 на схематичном виде сверху видимую на фиг.4 кулисную направляющую;
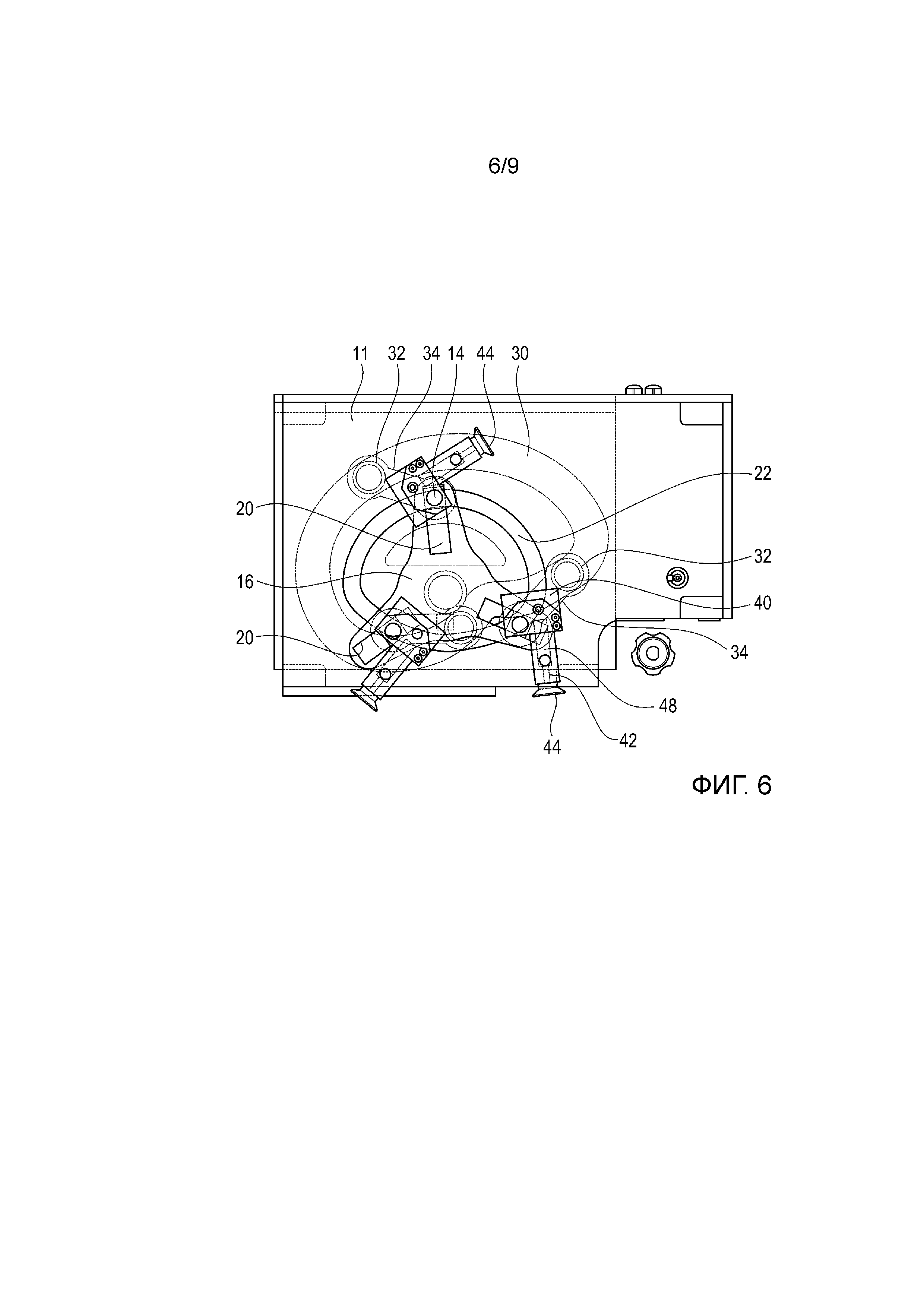
Фиг.6 на схематичном виде сверху группу вакуумных захватов вместе с их перестановочным механизмом;
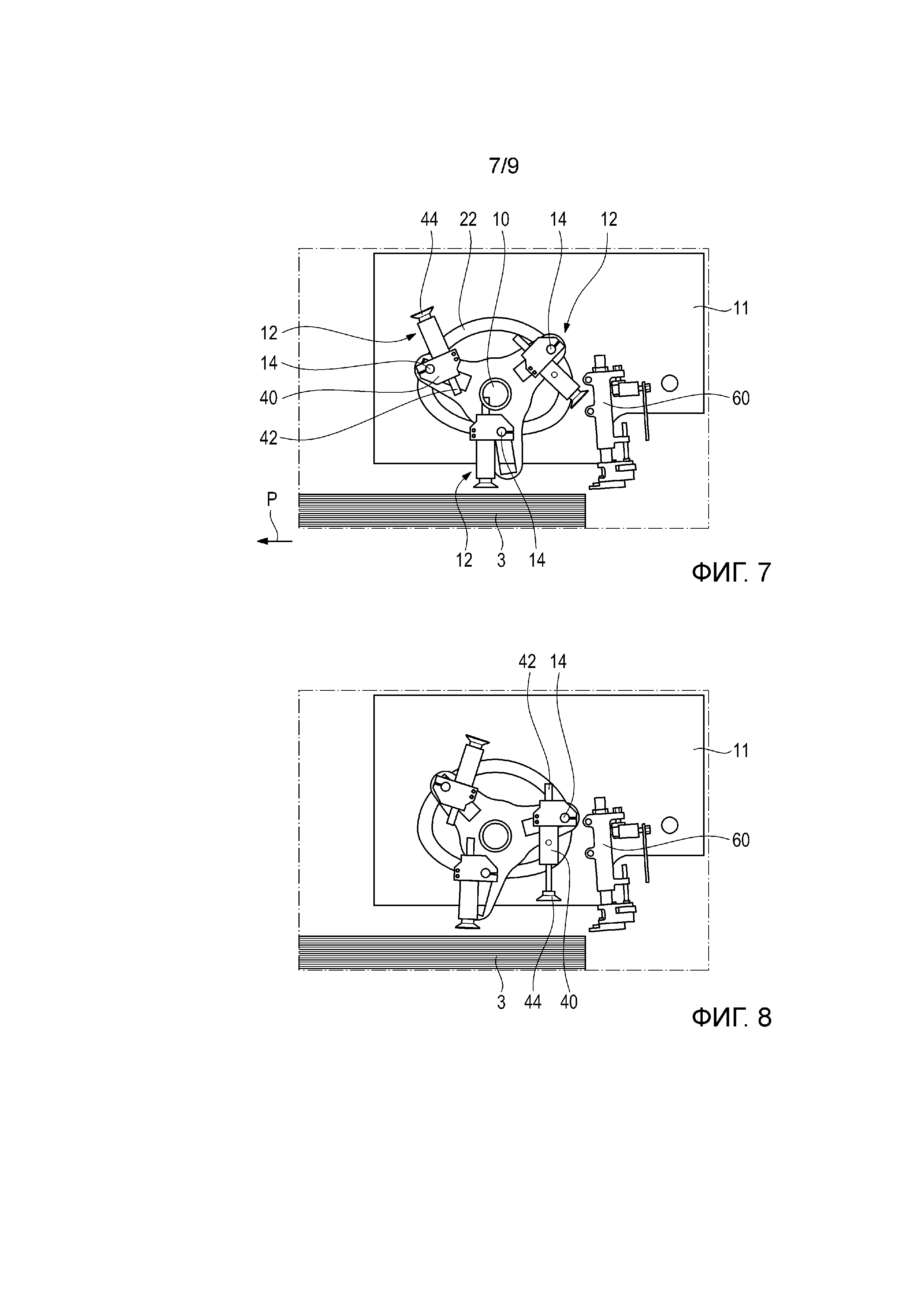
Фиг.7-12 на схематичных изображениях различные этапы извлечения самого верхнего листа из стопы.
На фиг.1 можно видеть машину 1, которая служит для того, чтобы обрабатывать листообразный материал. В показанном примере машина служит для того, чтобы соединить друг с другом соответственно два листа, например, ламинировать друг с другом.
Ссылочной позицией 2 обозначена первая стопа листов, а ссылочной позицией 3 обозначена вторая стопа листов. В процессе эксплуатации соответственно один лист из стопы 2 объединяется с одним листом из стопы 3, например, склеивается.
В отношении отдельных листов речь идет о листах из бумаги, полимерной пленки, картона или аналогичных материалов.
Чтобы извлечь отдельные листы из стоп, предусмотрен самонаклад. Он здесь в качестве примера у стопы 3 снабжен ссылочной позицией 4.
Самонаклад 4 поясняется более подробно далее на основании фиг.2-7.
Существенной составной частью самонаклада 4 является приводной вал 10, который расположен над плоскостью, в которой находится самый верхний лист стопы 3. При этом приводной вал 10 проходит параллельно этой плоскости и перпендикулярно направлению, в котором каждый извлеченный из стопы 3 лист затем транспортируется далее (см. стрелку Р на фиг.1, это направление также называется как направление укладки листов).
Для установки приводного вала 10 и прочих релевантных составных частей самонаклада предусмотрена рама 11, которая расположена над местом, на котором находится стопа 3.
На приводном валу 10 расположены несколько вакуумных захватов 12. Вакуумные захваты 12 служат для того, чтобы захватывать соответственно самый верхний лист стопы и перемещать его относительно стопы 3 вперед в направлении стрелки Р.
Вакуумные захваты 12 расположены на расстоянии от оси вращения приводного вала 10, так что они, когда приводной вал 10 приводится, перемещаются вдоль замкнутой траектории движения вокруг оси вращения.
Вакуумные захваты 12 расположены в различных, дистанцированных друг от друга в осевом направлении группах. Как можно видеть на фиг.2, вдоль оси вращения приводного вала 10 предусмотрено всего шесть групп вакуумных захватов 12. Как можно видеть на фиг.3, каждая группа вакуумных захватов здесь содержит три вакуумных захвата 12.
Вакуумные захваты 12 распределены по в целом трем несущим штангам 14, которые проходят параллельно оси вращения приводного вала 19. Если смотреть в окружном направлении, несущие штанги 14 расположены относительно друг друга с угловым расстоянием в 120°.
В частности, на фиг.3 и 4 можно видеть, что расположенные снаружи группы вакуумных захватов 12 имеют возможность перестановки в осевом направлении (см. зубчатые рейки 15). Это позволяет настраивать рабочую ширину самонаклада на различные форматы.
Упомянутые три несущие штанги 14 установлены в двух удерживающих элементах 16, которые расположены на противоположных друг другу осевых концах приводного вала 10. Каждый удерживающий элемент 16 имеет три проходящих в радиальном направлении кронштейна 18, причем в каждом кронштейне 18 предусмотрен направляющий паз 20, который проходит радиально и в котором установлен конец несущей штанги 14.
Направляющие пазы 20 позволяют несущим штангам 14 переставляться относительно оси вращения приводного вала 10 в радиальном направлении.
Радиус, на котором находится каждая несущая штанга 14, определяется посредством направляющей дорожки 22, которую можно видеть, в частности, на фиг.3. Направляющая дорожка 22 имеет круговую, в самом широком смысле, форму, причем она сглажена на обращенной к стопе 3 стороне.
При этом направляющая дорожка 22 предусмотрена в одной из боковых пластин рамы 11, в которой также установлен приводной вал 10.
Несущие штанги 14, когда вращается приводной вал 10, не только перестанавливаются при каждом обороте относительно радиального расстояния от оси вращения, но соответственно и поворачиваются в некоторых границах относительно соответствующих кронштейнов 18. Чтобы регулировать это поворачивание предусмотрена криволинейная дорожка 30 (см. в частности фиг.4), в которой перемещаются несколько кулачковых повторителей 32. При этом, каждый кулачковый повторитель 32 сопряжен через шатун 34 с несущей штангой 14.
Направляющий паз 20 вместе с направляющей дорожкой 22, а также криволинейная дорожка 30 с кулачковыми повторителями 32 образуют перестановочный механизм, с помощью которого регулируется положение и ориентация вакуумных захватов 12 при каждом обороте приводного вала 10. В общем, каждый вакуумный захват 12 при этом перемещается так, что его «передняя сторона», т.е. подлежащая контактированию с соответствующим листом вакуумная присоска, ориентирована параллельно плоскости соответствующего листа, пока вакуумный захват взаимодействует с листом. Затем соответствующий вакуумный захват 12 переводится «через голову» вновь в то положение, в котором он снова может воздействовать на лист.
На основании этого процесса движения криволинейная дорожка, если смотреть в осевом направлении, чаще всего лежит снаружи направляющей дорожки 22.
Каждый вакуумный захват 12 имеет тело 40 (см. фиг.3), которое закреплено без возможности вращения на одной из несущих штанг 14. На теле 40 с возможностью смещения установлен телескопически выдвигаемый шток 42, на передней стороне которого размещена собственная вакуумная присоска 44.
Внутри тела 40 расположена возвратная пружина 48 (см. фиг.6), которая нагружает шток 42 во втянутое положение, в котором вакуумная присоска 44 переставлена к телу 40.
Вакуумные захваты 12 активируются сжатым воздухом и содержат сопло Вентури, так что на вакуумной присоске 44 может создаваться желательное пониженное давление. Подведенный для активирования вакуумной присоски 44 сжатый воздух ведет к тому, что шток 42 телескопически переставляется из тела 40 наружу против действия возвратной пружины.
Сжатый воздух внутри приводного вала 10 подводится в пневматическом канале и оттуда через видимый на фиг.2 присоединительные патрубки 46 направляется к телу 40; размещенные на присоединительных патрубках 46 шланги здесь не изображены для лучшей обзорности.
В зависимости от типа регулирования и вакуумных захватов может быть предусмотрен один единственный пневматический канал, к которому подключены все вакуумные захваты, или для вакуумных захватов каждой несущей штанги предусмотрен собственный пневматический канал.
Далее на основании фиг.7-12 поясняется принцип действия самонаклада 4. При этом рассматривается в качестве примера один из вакуумных захватов 12 группы вакуумных захватов, причем соответствующее вакуумное устройство для лучшей отслеживаемости обозначено черной точкой.
Приводной вал вращается относительно фиг.7-12 в направлении движения часовой стрелки, чтобы извлечь из стопы соответственно самый верхний лист стопы 3 в направлении стрелки Р, так что он может обрабатываться далее.
Рассматриваемый здесь вакуумный захват 12 приближается к стопе 3 сверху, причем он посредством перестановочного механизма, в частности посредством криволинейной дорожки 30 и соответствующего кулачкового повторителя 32, поворачивается так, что шток 42 находится примерно перпендикулярно плоскости самого верхнего листа стопы 3 (сравни фиг.7 и 8). При этом несущая штанга 14 находится на относительно большом радиусе.
Также при подведении вакуумного захвата 12 к стопе 3 шток 42 вместе с вакуумной присоской 44 выдвигается (сравни опять фиг.7 и 8). Когда приводной вал 10 достаточно повернется далее, вакуумный захват 44 накладывается на самый верхний лист 50 стопы 3 (см. фиг.9).
После того, как вакуумная присоска 44 наложена на лист 50 и соответственно этому вакуумная присоска уплотнена, включается обеспечение сжатым воздухом вакуумного захвата 12 так, что возвратная пружина втягивает шток 42 в тело 40, в то время как одновременно в вакуумной присоске 44 продолжает действовать пониженное давление. Вследствие этого лист 50 поднимается от стопы 3 (см. фиг.10). Одновременно активируется прижим 60, который фиксирует нижележащий лист стопы 3.
Также является возможным поддерживать отделение самого верхнего листа от стопы посредством вдувания воздуха известным самим по себе способом.
При дальнейшем поворачивании приводного вала 10 вакуумный захват 12 двигается дальше по часовой стрелке (см. фиг.11), причем из-за направляющей дорожки 22 он выполняет по существу линейное движение параллельно плоскости листов в стопе 3 и в направлении стрелки Р.
На фиг.12 показано состояние, в котором лист 50 переставлен влево так далеко, что он захватывается схематично показанным на фиг.1 транспортирующим устройством 70. Приблизительно одновременно вакуумная присоска 44 деактивируется, так что лист освобождается. На фиг.8 можно видеть, что в этом состоянии уже следующая вакуумная присоска приближается к затем самому верхнему листу стопы 3, так что может зацепляться следующий лист и подводиться к транспортирующему устройству 70.
Приводной вал 10 не обязательно должен быть выполнен в виде цельного конструктивного элемента, который проходит вдоль оси вращения, вокруг которой переставляются вакуумные захваты 12. Вместо этого возможны также другие конструкции. Важным является лишь то, что вакуумные захваты 12 могут перемещаться вдоль криволинейной дорожки вокруг оси вращения.
Реферат
Изобретение касается самонаклада для машины для обработки листообразного материала, как бумага, картон или пленка. Самонаклад (4) для машины (1) для обработки листообразного материала содержит приводной вал (10), который проходит по существу перпендикулярно направлению укладки листов и снабжен по меньшей мере одним вакуумным захватом (12), который вращается над листообразным материалом, когда приводной вал (10) приводится в действие. Вакуумный захват (12) выполнен с возможностью перестановки между неактивным положением, в котором он не взаимодействует с листообразным материалом, и активным положением, в котором он может воздействовать на верхнюю сторону листообразного материала и захватывать его с собой. Каждый вакуумный захват (12) имеет тело (40) и выполненную с возможностью перестановки относительно него вакуумную присоску (44). Тело (40) размещено на расстоянии от центральной оси приводного вала (10). Приводной вал (10) имеет несколько несущих штанг (14), которые проходят параллельно оси вращения приводного вала (10) и на которых размещено тело (40) вакуумного захвата (12). Несущие штанги (14) установлены в двух удерживающих элементах (16), которые расположены на противоположных друг другу осевых концах приводного вала (10). Каждый удерживающий элемент (16) имеет проходящие в радиальном направлении кронштейны (18). В каждом кронштейне (18) предусмотрен направляющий паз (20), который проходит радиально и в котором установлен конец несущей штанги (14). Изобретение позволяет создать более простое в своей конструкции устройство. 13 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и устройство для транспортировки плоских изделий
Комментарии