Устройство для разбора стопы листовых материалов - SU718004A3
Код документа: SU718004A3
Чертежи



Описание
(54) УСТРОЙСТВО ДЛЯ РАЗБОРА СТОПЫ ЛИСТОВЫХ
МАТЕРИАЛОВ дй№етн ая с конусами отделяющих валиков 3, Цепь 7 приводится в движение по стрелке 8 с помощью цепных колес 9, Общий вал 10 несет цепное колесо 11, которое с помощью цепи 12 соединено с ведущей шестерней электродвигателя . Направляющие б цепи 7 имеют наклонный участок 13, расположенный пе ред опорными планками 1. Опорная поверхность 5 стопы 2 расположена п углом к направлению движения отделя ющих валиков 3, Вакуумный присос 4 смонтирован н одном плече двуплечего рычага 14, свободный конец которого с помощью ролика 15 связан с кулисой liS. В то ке 17 двуплечий рычаг 14 имеет пово ротную опору, которая эксцентрично закреплена на подвижной шестерне 18 планетарного механизма. Шестерня 18 находится в зацеплении с зубчатым колесом 19 и вращает ся при помощи водила 20. Вследствие вращения водила 20 шестерня 18 катится по внутренней поверхности зубчатого колеса 19, вр щающегося в направлении стрелки 21 относительно собственной оси. Поворотная опора (точка) 17 перемещается по траектории в виде гипоциклоида 22 (сМ.фиг.9). ..-.:-. Соответственно траектории перемещения поворотной опоры (точка) 17 перемещается вакуумный присос 4 по траекторий 23 (см,фиг,4), котора аналогична гипоциклоиду 22, но по сравнению с ним имеет одну удлиненн сторону вследствие линейного прохож дения одного плеча рычага 14. Траектория 23 перемещения имеет простирающийся в зоне опорной повер ности 5 стопы 2 с верхней стороны опоры к нижней ее стороне участок 2 и следующий по траектории перемещен участок 25, который выходит из зоны опорной поверхности 5 стопы 2. Следовательно,, вакуумный присос в своем верхнем мертвом положении (см.фиг. 4) входит в опорную поверхность 5, затем в процессе своего пе ремещения вдоль участка 24 попадает , на нижнюю стордну опорной поверхности 5 стопы 2 и затем вдоль ка 25 своей траектории выходит из зоны опорной поверхности стопы 1 в боковое, мертвое положение. Участок 26 траектории перемещения возвращае вакуумный присос 4 снова в свое вер нее мертвое положение. Вакуумный присос 4 приводится в действие в такт с передвигающимис мимо него валиками 3 таким образом что после прохождения одного валика 3 входит в проем 27 между этим вали ком и последующим (см.фиг.4) и затем своевременно выходит для того, чтобы освободить путь следующему
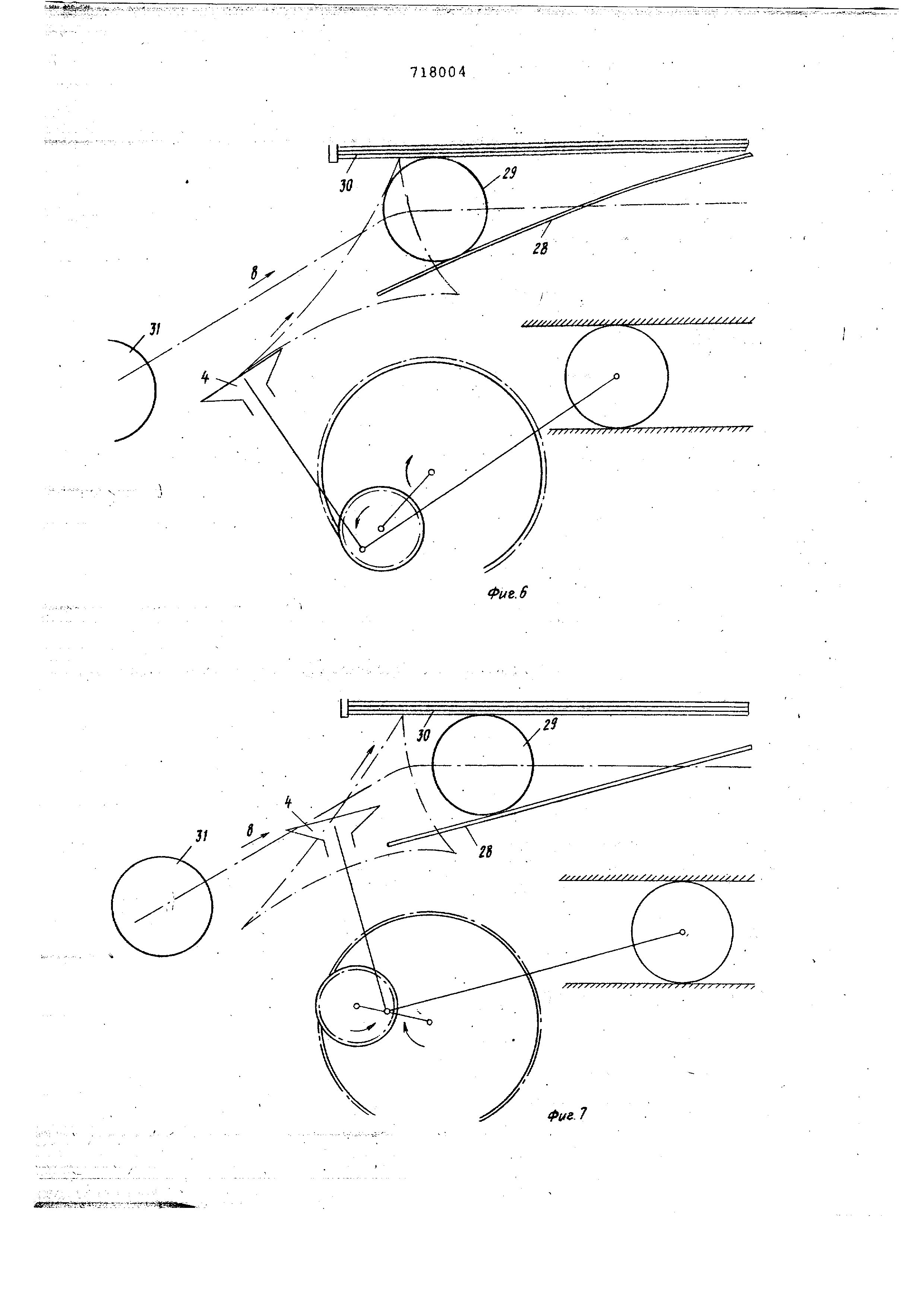
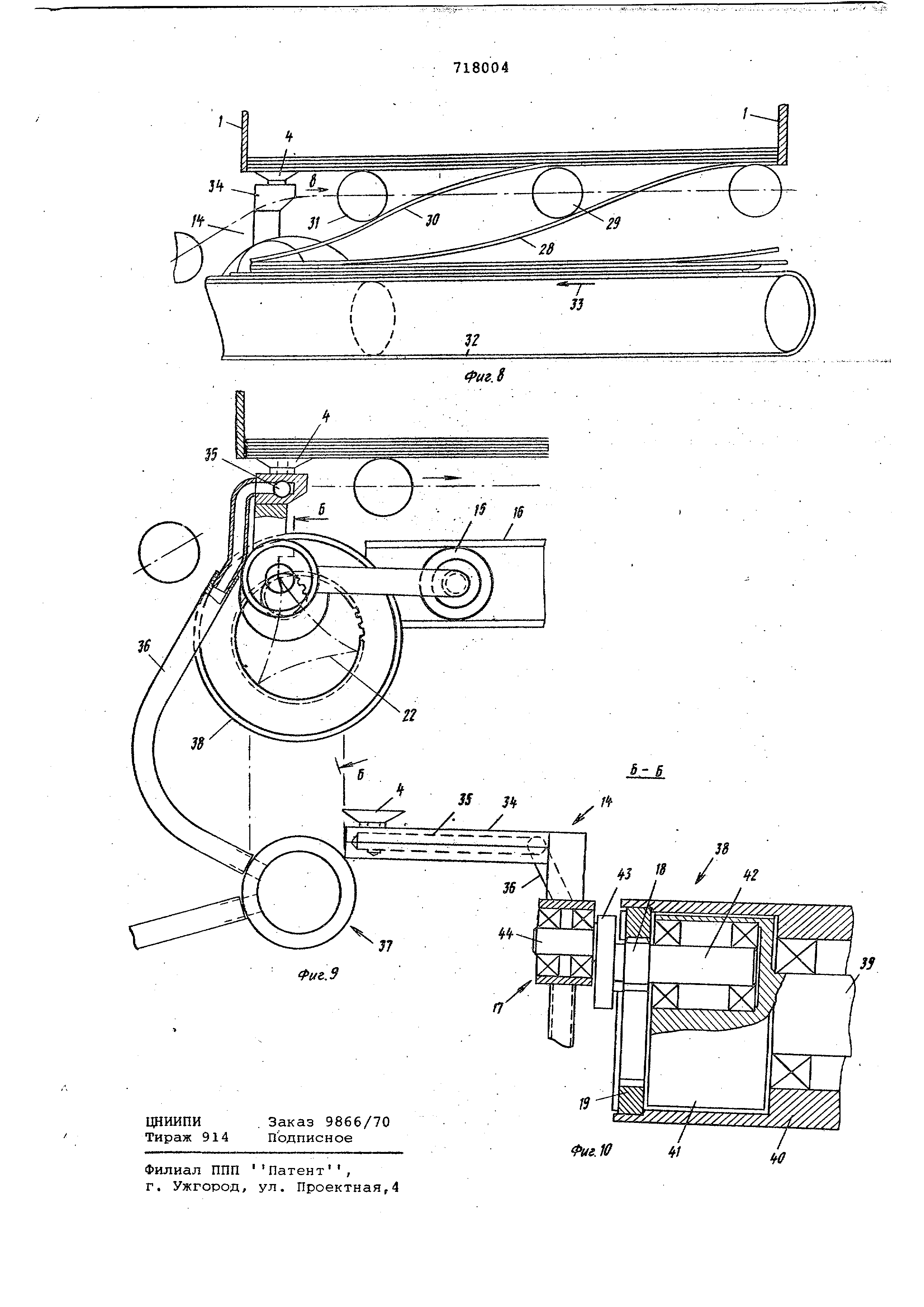
: :ггг ггг : . валику (см.фиг.5). Затем вакуумный присос 4 снова возвращается через следующий после.упомянутого ваЛика рроем в свое верхнее мертвое положение , Вакуумный присос 4 в своей верхней мертвой точке соединен с источником разреж.ения, но отсоединяется от него в своей нижней мертвой точке . Следовательно, вакуумный присос 4при прохождении участка 24 своей траектории перемещения является активным , а при прохождении остальных пассивным. В своем верхнем мертвом положении вакуумный присос 4 присасывает обращенный к направлению движения угол самой нижней части 28 стопы 2 и при перемещении в нижнее мертвое положение тянет захваченный угол с верхней стороны опорной поверхности 5стопы 2 через проем. Следующий валик 29 (см.фиг.5) может теперь поехать на отогнутый угол части 28 стопы (см.фиг.б). Вакуумный присос 4 сразу же отсоединяется от источника разряжения и продолжает перемещаться по своей траектории, причем, удаляясь от удерживаемого валиком 29 в отогнутом положении угла части 28 стопы, снова попадает в верхнее мертвое положение , чтобы там захватить соответствующий угол самой нижней теперь части 30 стопы 2 и ввести угол в проем между валиком 29 и следующим валиком 31. Валик 31 наезжает на отогнутый угол части 30 стопы, и йакуумный присос 4 продолжает перемещаться по своей траектории. , В ходе перемещения валики 29 и 31 (см.фиг.8) осуществляют постепенное от-деттение частей 28 и 30 стопы 2. - Параллельно, основанию опорных планок 1 для .стопы 2 находи.тся приемный транспортер 32, расположенный под тем же углом к оси отделяющих валиков 3. Отсоединенные от стопы 2 листы падают на транспортер 32 и транспортируются в направлении стрелки 33. Валики 2 выполняют не только несущую функцию, но и функцию разделения независимо от веса стопы 2. Двуплечий рычаг 14 имеет консоль 34, через отверстие 35 которой вакуумный присос 4 соединен со всасывающей трубопроводом 36, подключенным через клапанную систему 37 к источнику разряжения. Привод за вакуумного присоса 4 с помощью вала 39 соединен с электродви .гателем. Вал 39 размещен в неподвижном 40 и несет диск 41, в котором эксцентрично по отношению к валу 39 насажен вал 42, на котором неподвижно сидит шестерня 18. Поворотная опора (точка) П закреплена , на несущем плече 43 с помошью опорной 44, которйя устдно лена эксцентрично по отношению к валу 42 так, чтобы ось опорной цапфы 44 пересекала круг обкатывания шестерни 18 и чтобы цапфа 44 перемещалась по гипоциклоидной траектории 22, От этой геометрически определяемой траектории 22 опорной цапфы 44 с помощью направ ляющей двуплечего рычага 14 и с помо щью ролика 15 кулисы 16 выводится траектория передвижения вакуумного присоса 4, Формула изобретения 1. Устройство для разбора стопы листовых материалов, содержащее опор ные планки для стопы, средство для отделения листов, включающее вакуумный присос и отделяющие валики с при водом, расположенные под опорными планками, и приемный транспортер, о т л и ч а ю щ е е с я тем, .что, с целью увеличения производительност устройства, средство-для отделения листов снабжено планетарным механизмом , двуплечим рычагом, эксцентрично смонтированным на подвижной шестерне планетарного механизма, и направ ляющими , причем вакуумный присос смонтирован на одном плече рычага, а второе плечо рычага установлена в направляющих при помощи ролика. 2,Устройство по п.1, о т л ичающееся тем, что привод отделяющих валиков выполнен в виде бесконечной цепи с направляющими, кинематически связанной с водилом планетарного механизма. 3,Устройство по п.2, о т л ичаюиееся тем, что направляющие для цепи имеют наклонный участок , расположенный перед опорными планками для стопы, причем вакуумный присос установлен под веЕяяиной наклонного участка, а его наклон направлен в сторону, противоположную движению цепи. 4.Устройство по ПП.1 и 2, о тличающееся тем, что основание опорных планок для стопы расположено под- углом к оси. отделяющих валиков. 5.Устройство по П.1, отличающееся тем, что приемный транспортер расположен параллельно основанию опорных планок под углом к ОСИ отделяющих валиков . Источники .информации, принятые во внимание приэкспертизе 1. Акцептованная заявка ФРГ № 1137746; кл. 15 Е 8/11, 1962.


Реферат
Формула
Комментарии