Устройство разделения плоских предметов, соответствующие способ управления и почтовая машина - RU130981U1
Код документа: RU130981U1
Чертежи


Описание
Область техники, к которой относится полезная модель
Полезная модель относится к области разборки находящихся в стопе плоских предметов и, в частности, почтовых отправлений малого формата, таких как письма, или большего формата, таких как журналы, чтобы их рассортировать и транспортировать партиями на конвейере. В частности, полезная модель относится к разделению таких почтовых отправлений в случае, когда они перекрывают друг друга, образуя так называемые множественные захваты отправлений, как это принято обычно называть в этой области.
Уровень техники
Обычно почтовые отправления находятся на ребре в стопе в отсеке-накопителе напротив разборочной плиты и у подравнивающего борта. Эта разборочная плита оснащена средством перемещения, таким как перфорированная лента, взаимодействующая с электрическим вентилем, которая позволяет переместить первое отправление стопы в направлении выемки, в основном параллельном вышеуказанной плите.
Это средство перемещения направляет каждое отправление в сторону конвейера с целью его дальнейшей обработки. Обычно различные отправления приводятся в движение одно за другим без взаимного перекрывания. Однако иногда два смежных отправления перекрывают друг друга, образуя «множественный захват». В этом случае необходимо отделить их друг от друга, чтобы обеспечить оптимальную обработку каждого из отправлений из этого множественного захвата.
Можно сначала обработать множественные захваты до разборки при помощи механических систем. Эти системы предназначены для разделения отправлений до их направления в сторону конвейера. Можно также, как известно, отслеживать эти множественные захваты на выходе конвейера, где их отбрасывают.В этом последнем случае производительность обработки отправлений снижается.
В публикации US 2009/0218751 описаны способ и устройство, позволяющие разделять различные отправления, образующие множественные захваты. В этом документе используют два ряда приводных шкивов, расположенных с двух сторон от зоны прохождения отправлений. При номинальной работе скорости вращения шкивов увеличиваются в сторону выхода, при этом скорости вращения, шкивов, принадлежащих к одному ряду, превышают скорости вращения шкивов, находящихся напротив и принадлежащих к другому ряду.
В этих условиях в случае появления множественного захвата отправление, которое увлекается более быстрым рядом шкивов, перемещается со скоростью, слегка превышающей скорость другого из этих отправлений, увлекаемого более медленными шкивами. Эта разность скоростей приводит к созданию усилия сдвига, действующего вдоль плоскости отправлений и позволяющего отделять эти отправления друг от друга.
Однако это последнее решение имеет некоторые недостатки. Действительно, его эффективность не является удовлетворительной, так как на практике было установлено, что оно не обеспечивает систематического разделения отправлений, принадлежащих к множественному захвату. Кроме того, оно является относительно агрессивным, поскольку может привести к повреждению непрочных отправлений, таких как открытые или пластифицированные отправления.
Кроме того, в патенте US 3 599 967 описано устройство разделения плоских предметов, содержащее три приводных секции, при этом вторая приводная секция расположена частично напротив первой и третьей приводных секций, разделяя вместе с ними разные зоны перекрывания. Эти приводные секции оборудованы лентами, каждая из которых является перфорированной в двух разных участках. Эти ленты связаны с системами засасывания, обеспечивающими притягивание плоских предметов к одной или другой из лент в перфорированных зонах. Ленты синхронизированы между собой таким образом, чтобы прохождение их перфорированных участков на уровне зоны перекрывания происходило со смещением. Устройство разделения дополнительно содержит средства обнаружения присутствия предметов напротив приводных секций для селективного управления системами засасывания. В первом варианте, когда множественный захват поступает в первую приводную секцию, один из предметов остается заблокированным упором первой приводной секции, тогда как другой предмет прижимается к ленте второй секции и направляется в третью секцию. Во втором варианте, когда множественный захват поступает в первую приводную секцию и переходит во вторую приводную секцию, один из предметов остается заблокированным упором второй приводной секции, тогда как другой предмет прижимается к ленте третьей секции и направляется на выход устройства. Первый и второй варианты зависят от того, каким образом предметы перекрывают друг друга.
В патенте ЕР 0598641 описано устройство распределения плоских предметов, содержащее устройство разделения, включающее в себя две приводные секции с перфорированными лентами, которые находятся друг против друга, сближаясь на первом участке и расходясь на втором участке. Ленты связаны с различными системами засасывания таким образом, чтобы предметы предпочтительно прижимались к ведущей ленте. Кроме того, в расходящемся участке ленты разделены отражателем. Таким образом, в случае множественного захвата из двух предметов первый предмет остается прижатым к ведущей ленте, тогда как второй предмет отклоняется отражателем, выходит из стопы и прижимается к второй ленте.
Кроме того, в публикации JP 1 236 154 описано устройство разделения плоских предметов, содержащее две приводные ленточные секции, не зависимые друг от друга, при этом каждая приводная секция связана с системой засасывания, согласованной со средствами отслеживания предметов.
Наконец, в патенте US 6,494,446 описано устройство подачи плоских предметов, содержащее отсек-накопитель, в котором плоские предметы перемещаются в стопе на ребре в первом направлении перемещения, средство разделения для отделения самого переднего в стопе плоского предмета от остальной части стопы и его перемещения во втором направлении перемещения, по существу перпендикулярном к первому направлению перемещения, средство выемки, захватывающее отделяемый от стопы предмет для его подачи во втором направлении перемещения на вход конвейера. Это устройство подачи дополнительно содержит средства измерения толщины предмета после разделения и средство удержания, которое действует на отбираемый плоский предмет силой удержания, противодействующей его перемещению в направлении конвейера, при этом положение средства удержания по отношению к средству выемки можно регулировать и корректировать в зависимости от измеряемой толщины плоского предмета. Средство выемки смещено и отделено во втором направлении перемещения от средства разделения, и средство удержания предусмотрено напротив средства выемки.
Однако эти устройства не позволяют добиться точной и воспроизводимой разборки с сохранением целостности предметов.
Раскрытие полезной модели
Задачей полезной модели является устранение вышеуказанных недостатков, присущих известным устройствам. В частности, предложено устройство, позволяющее разделять по существу все поступающие в него множественные захваты. Также предложено устройство, позволяющее гарантировать целостность проходящих через него предметов.
Поставленная задача решена в устройстве разделения плоских предметов, содержащее вход, выход, зону прохождения предметов, расположенную между входом и выходом, первое и второе средства перемещения предметов, расположенных с двух сторон от зоны прохождения, и первое и второе средства удержания, по меньшей мере, одного плоского предмета по отношению, по меньшей мере, к одному другому плоскому предмету, выполненные с возможностью их отделения друг от друга, при этом первое и второе средства удержания связаны соответственно с первым и вторым органами перемещения, при этом, согласно полезной модели, первое и второе средства перемещения отстоят друг от друга, образуя указанную зону прохождения предметов, при этом первое и второе средства удержания выполнены с возможностью создания по существу поперечных первой и второй сил в противоположных направлениях, чтобы притягивать, по меньшей мере, один предмет к соответствующему средству перемещения, причем содержит средства управления, выполненные с возможностью активации и деактивации, независимо друг от друга, каждого первого и второго средства перемещения и каждого первого и второго средства удержания.
Основополагающей идеей полезной модели является создание в основном поперечной силы, действующей на отправления, с целью их разделения, в отличие от силы, действующей в продольном направлении в известных решениях. Это решение отличается меньшей агрессивностью по отношению к отправлениям и позволяет уменьшить общую длину устройства.
Устройство разделения в соответствии с полезной моделью может также содержать следующие отличительные признаки:
- первое и второе средства перемещения разделены расстоянием, составляющим от 5 до 50 мм, предпочтительно близким к 10 мм;
- оно содержит средства изменения расстояния, разделяющего первое и второе средства перемещения;
- первое и второе средства удержания содержат средства засасывания, выполненные с возможностью воздействия поперечной силой засасывания на предметы множественного захвата, а также средства управления этими средствами засасывания;
- каждое первое и второе средство перемещения представляет собой перфорированную ленту, и каждое средство засасывания выполнено с возможностью создания разрежения на поверхности этой перфорированной ленты;
- каждое средство засасывания содержит вакуумный насос, управляемый электрическим вентилем, образующим средство управления, причем этот вакуумный насос выполнен с возможностью создания разрежения в камере засасывания, расположенной вблизи соответствующей перфорированной ленты;
- оно дополнительно содержит средство обнаружения возможного множественного захвата, образованного несколькими взаимно перекрывающимися предметами;
- оно дополнительно содержит устройство предварительного засасывания, установленное с одной стороны зоны прохождения;
- оно содержит средства измерения толщины каждого предмета или каждого множественного захвата предметов, связанные со средствами изменения расстояния между первым и вторым средствами перемещения.
Поставленная задача решена также в способе применения вышеуказанного средства разделения, в котором i) создают, по меньшей мере, одну поперечную силу для разделения этого захвата на единственный первый предмет и, по меньшей мере, на один другой предмет и ii) удаляют единственный предмет, задерживая при этом другой или каждый другой предмет, и после удаления единственного первого предмета: а) если имеется другой единственный предмет, его удаляют за пределы зоны прохождения; и b) если имеются несколько других предметов, образующих множественный захват порядка 2, этот захват обрабатывают при помощи вышеуказанных этапов i) и ii) до получения множественного захвата высшего порядка, образованного только двумя предметами.
Объектом полезной модели является также почтовая сортировочная машина, содержащая устройство разборки и конвейер, при этом устройство разборки содержит отсек-накопитель, в котором плоские предметы расположены на ребре напротив разборочной плиты, которая выполнена с возможностью отделения первого предмета по отношению к другим предметам стопы и его приведения в движение в направлении выемки, а конвейер выполнен с возможностью транспортировки партиями разобранных таким образом предметов, причем, согласно изобретению, она дополнительно содержит описанное выше устройство разделения, установленное между устройством разборки и конвейером.
Краткое описание чертежей
Далее следует более подробное описание неограничивающих примеров осуществления полезной модели со ссылками на прилагаемые чертежи.
На фиг.1 схематично показано устройство разборки и устройство разделения плоских предметов в соответствии с полезной моделью, вид сверху;
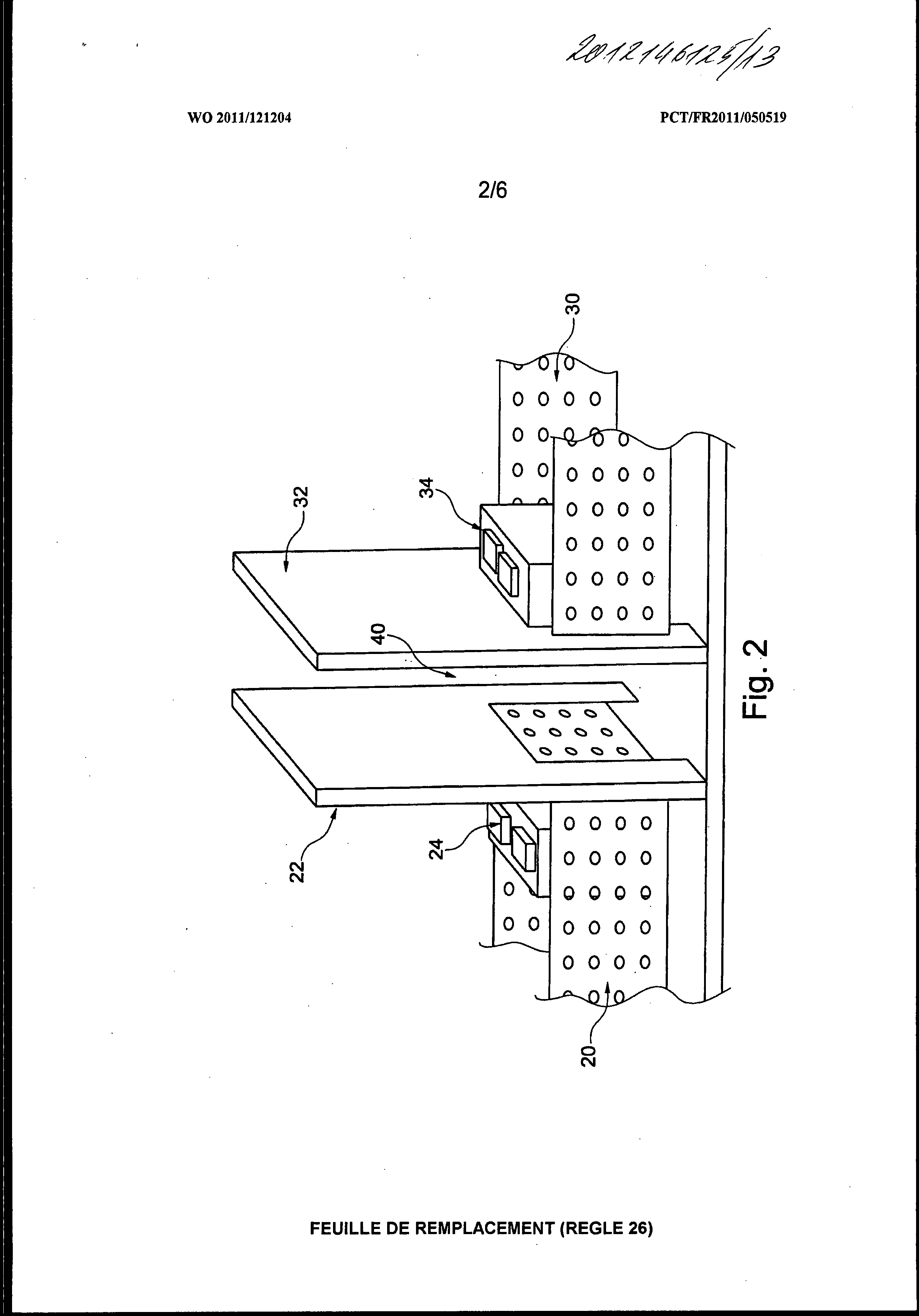
на фиг.2 показано устройство разделения в перспективе под другим углом;
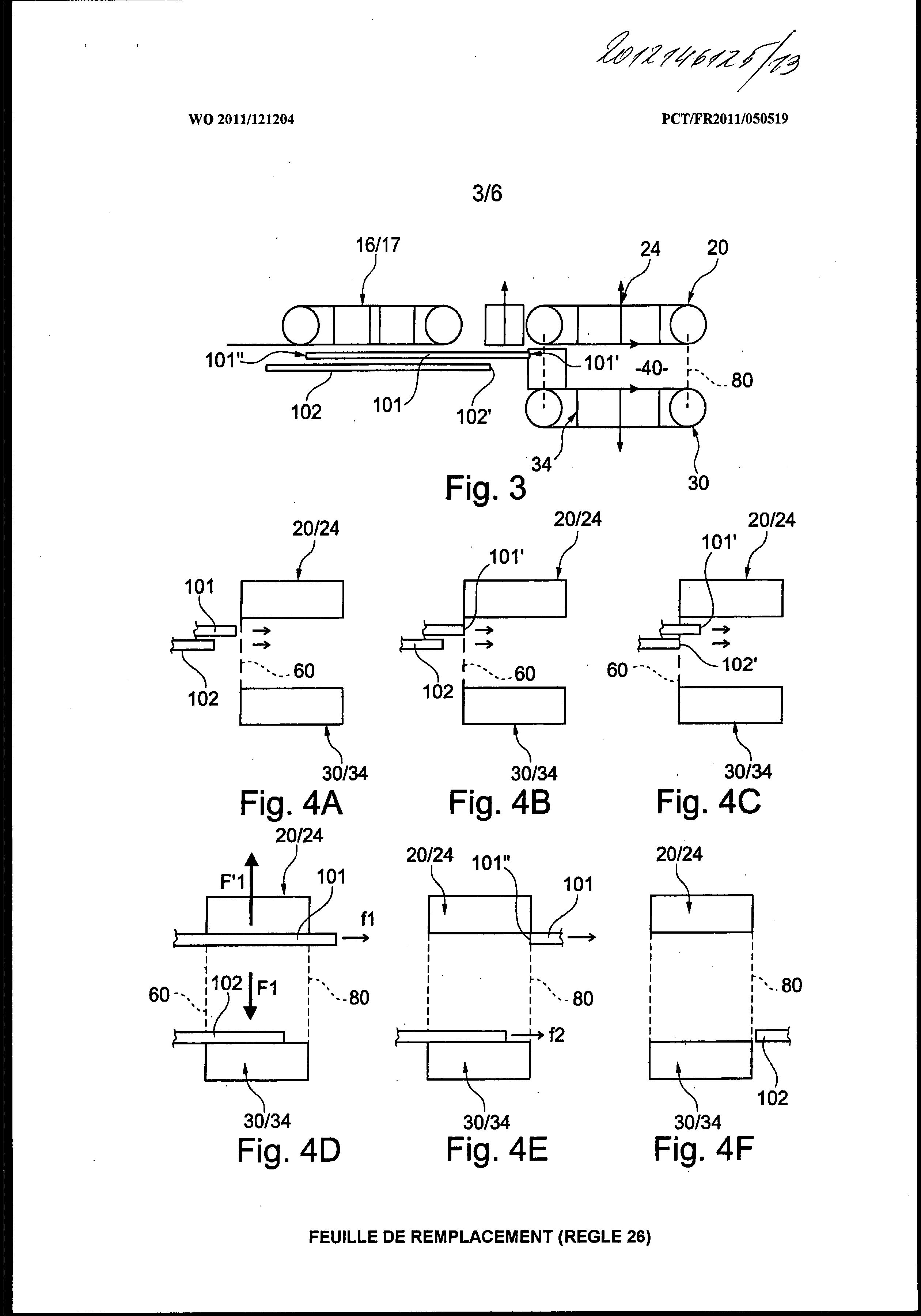
на фиг.3 показан первый вариант применения этого устройства разделения, вид сверху;
на фиг.4A-4F показано поступательное перемещение предметов вдоль устройства разделения в варианте применения, представленном на фиг.3, вид сверху;
на фиг.5 показан второй вариант применения этого устройства разделения, вид сверху;
на фиг.6А-6Е показано поступательное перемещение предметов вдоль устройства разделения в варианте применения, представленном на фиг.5, вид сверху;
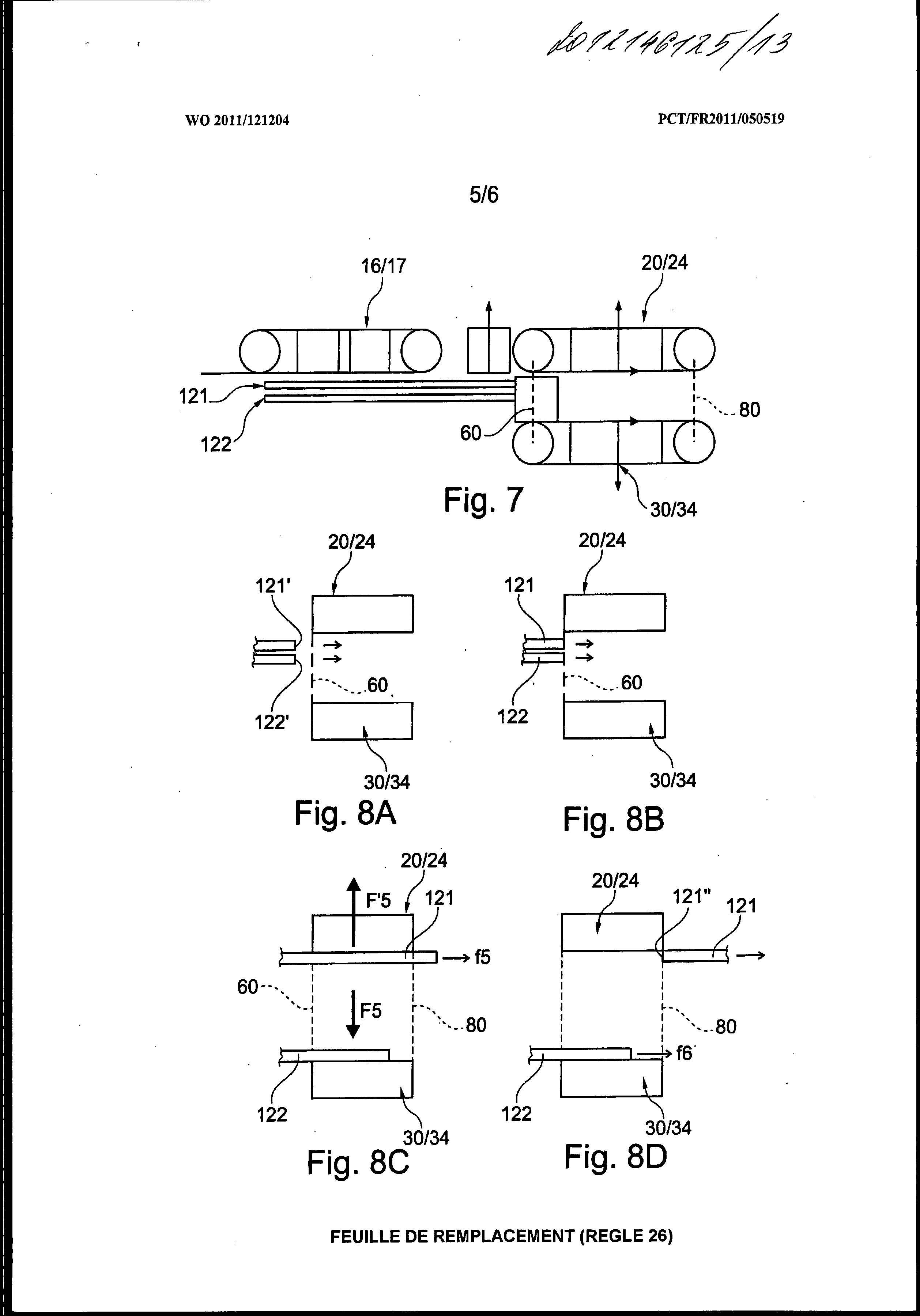
на фиг.7 показан третий вариант применения этого устройства разделения, вид сверху;
на фиг.8A-8D показано поступательное перемещение предметов вдоль устройства разделения в варианте применения, представленном на фиг.7;
на фиг.9 показан четвертый вариант применения этого устройства разделения, вид сверху;
на фиг.10A-10D показано поступательное перемещение предметов вдоль устройства разделения в варианте применения, представленном на фиг.9, вид сверху.
Осуществление полезной модели
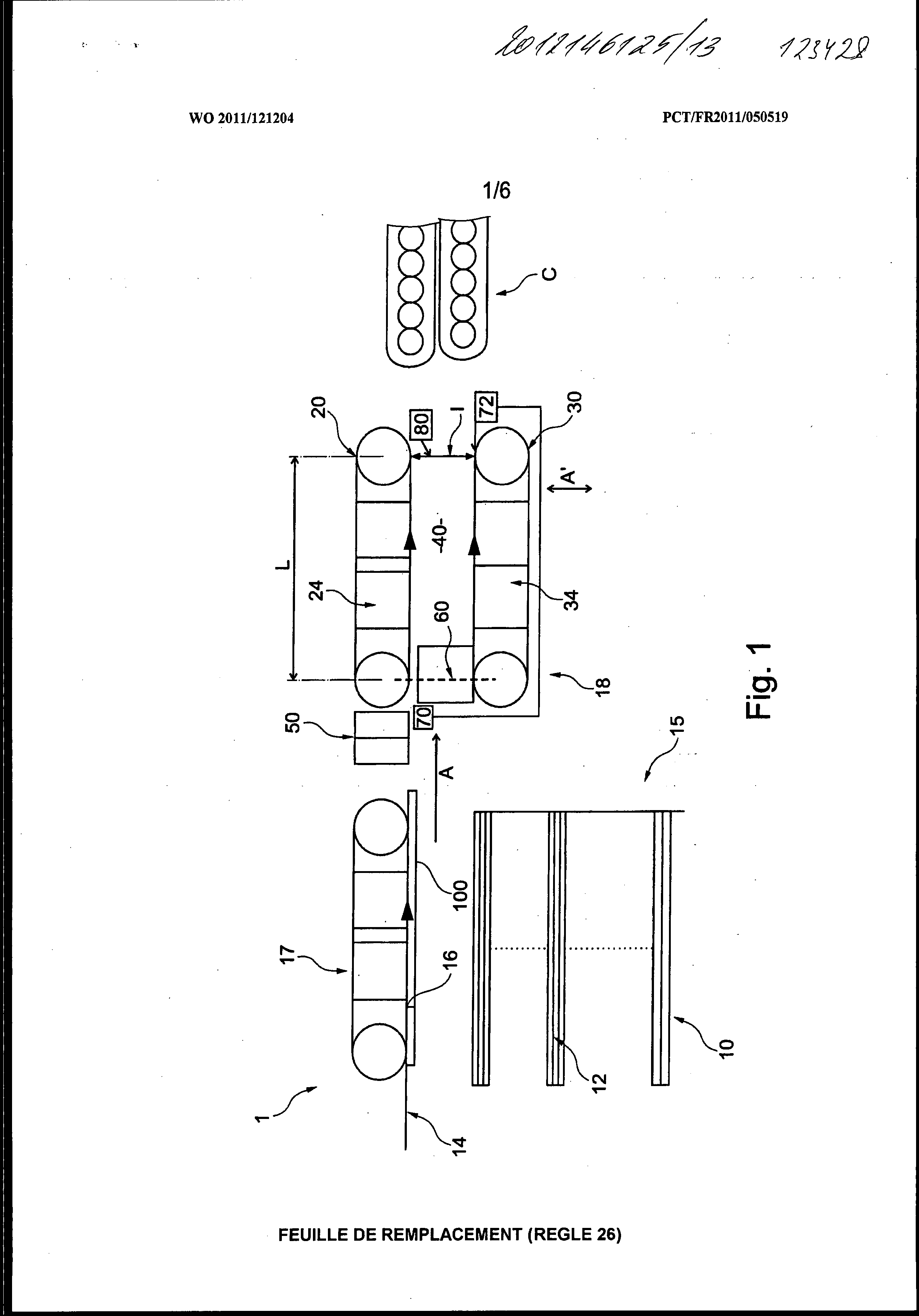
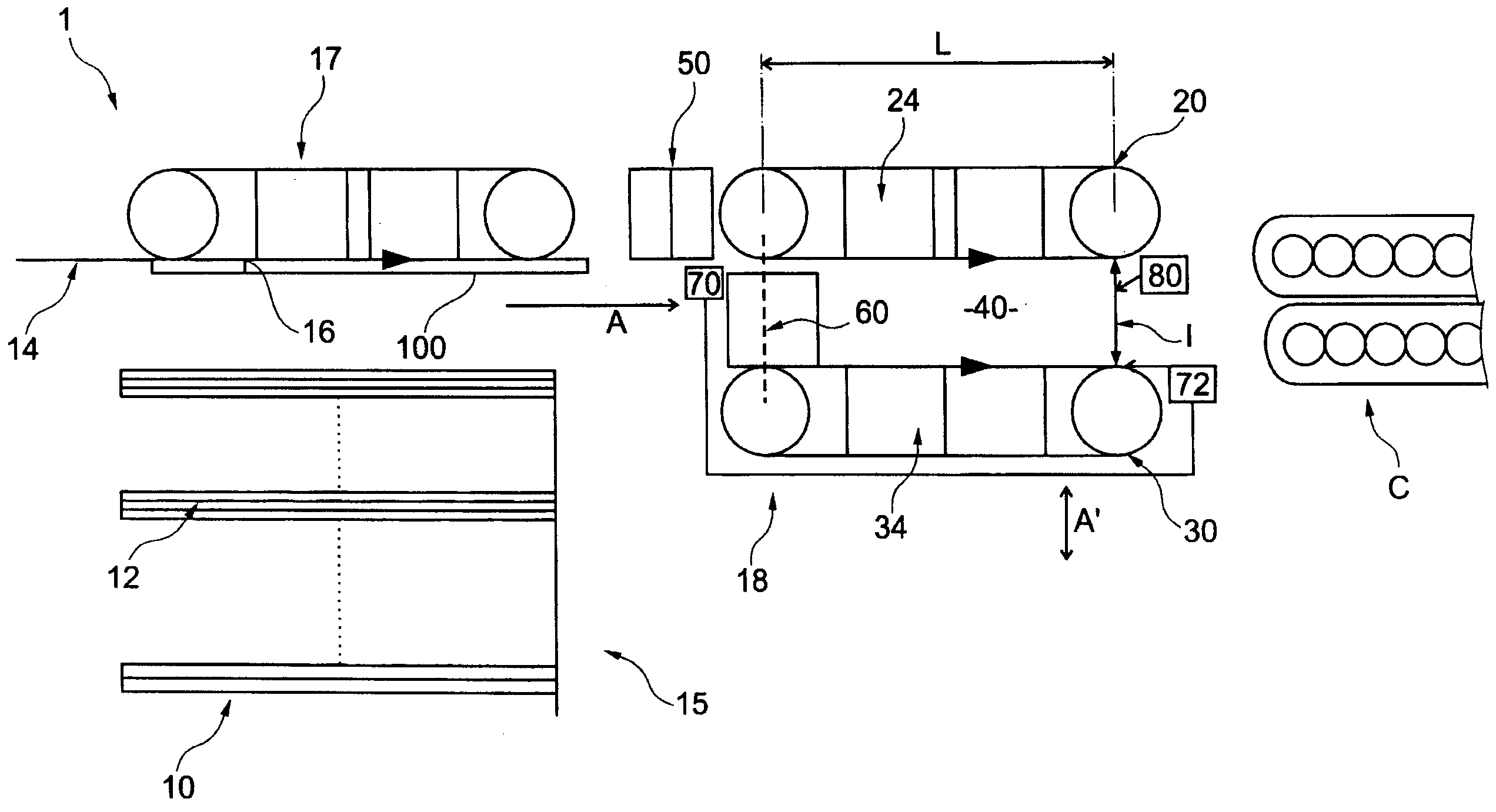
На фиг.1 представлен вид сверху устройства 1, позволяющего производить разборку плоских предметов, которые в данном случае являются почтовыми отправлениями. Это устройство прежде всего содержит отсек-накопитель 10, в котором предназначенные для разборки почтовые отправления расположены в стопе 12. По краям этого отсека-накопителя расположены разборочная плита 14, на которую опираются отправления, а также подравнивающий борт 15, по существу перпендикулярный к разборочной плите.
Кроме того, предусмотрен орган 16 перемещения, выполненный в виде перфорированной ленты, взаимодействующей с разборочным электрическим вентилем 17. Этот орган 16 выполнен с возможностью приведения в движение первого отправления 100 стопы, опирающегося на плиту 14, в направлении выемки, обозначенном стрелкой А. Это направление параллельно разборочной плите 14, то есть является горизонтальным на фигурах и направлено вправо. Различные вышеупомянутые механические органы являются известными, поэтому их дальнейшее описание опускается.
На выходе органа 16 перемещения относительно направления А предусмотрено устройство разделения в соответствии с полезной моделью, обозначенное общей позицией 18. Оно содержит два средства перемещения, в представленном примере выполненные в виде двух перфорированных лент 20 и 30. Эти ленты, как известно, образуют бесконечную петлю и приводятся в движение обычными приводными средствами, не показанными на фигурах. Как показано на фиг.2, каждая лента 20 или 30 встроена в стойку 22 или 32, обеспечивающую опору для отправлений, в частности, большого размера.
Приводные ленты имеют находящиеся друг против друга стороны, которые ограничивают пространство 40 для движения отправлений, называемое также «каналом». Например, но не ограничительно продольный размер или длина L этого канала 40 относительно направления перемещения отправлений составляет от 50 до 200 мм, в частности, приблизительно равна 100 мм. Кроме того, его поперечный размер или ширина 1, которая соответствует промежутку между двумя лентами, обычно составляет от 5 до 50 мм, в частности, приблизительно равна 10 мм. Иначе говоря, при любом варианте работы устройства ленты отстоят друг от друга, то есть не входят во взаимный контакт.
Каждая лента 20 или 30 связана с вакуумным насосом классического типа, не показанным на фигурах. Каждый насос может создавать разрежение внутри тоже не показанной камеры засасывания, которая расположена сзади передней стороны соответствующей ленты. Это позволяет создавать силу засасывания, действующую через отверстия ленты.
Кроме того, электрические вентили 24 и 34 выполнены с возможностью управлять активацией соответствующего вакуумного насоса. Каждая пара электрический вентиль/вакуумный насос образует средство удержания в рамках полезной модели. Пару лента 20/электрический вентиль 24 называют левой, тогда как пару 30/34 называют правой, относительно направления перемещения. Кроме того предусмотрены различные не показанные средства управления, выполненные с возможностью приведения в действие лент и электрических вентилей, независимо друг от друга.
Кроме того, устройство 18 факультативно может содержать элемент 50 предварительного засасывания, установленный между органом 16 перемещения и двумя лентами 20 и 30. Этот элемент 50, который сам по себе известен, установлен с той же стороны, что и лента 20, то есть слева относительно направления перемещения А.
Устройство разделения в соответствии с полезной моделью содержит также систему отслеживания, обозначенную общей позицией 60. Как показано сверху на фиг.1, эта система расположена на высоте, меньшей высоты конвейерных лент 20 и 30. Иначе говоря, она обеспечивает визуальный контроль отправлений 10 снизу.
Эта система, установленная вблизи входа канала 40, выполнена с возможностью определения профиля прихода каждого отправления, проходящего изолировано или в множественном захвате напротив этой системы.. Например, она может через равномерные интервалы выдавать информацию о положении точки пересечения каждого отправления с линией, перпендикулярной к направлению перемещения конвейера. Эта система отслеживания описана, например, в документе FR-A-2 891 168, поданном на имя заявителя.
Система 60 отслеживания выполнена с возможностью взаимодействия с различными вышеупомянутыми приводами. Для этого предусмотрены различные, не показанные линии связи, соединяющие попарно эту систему и эти приводы.
Вблизи системы отслеживания расположен дополнительный датчик 70, предназначенный для определения толщины каждого отправления или группы отправлений. Этот датчик 70 связан со средствами 72, позволяющими отодвигать или приближать одну из лент и ее камеру засасывания по отношению к другой ленте и к ее камере засасывания. Это движение, показанное двойной стрелкой А', позволяет изменять ширину канала 40. Этот датчик 70 и эти средства 72 перемещения схематично показаны на фиг.1.
Наконец, вблизи выходного конца канала установлен так называемый выходной датчик 80. Этот датчик соответствующего классического типа позволяет обнаруживать, когда отправление действительно выходит из канала. Выход канала направлен на конвейер С классического типа, который схематично показан на фиг.1 и позволяет известным образом производить последующую обработку отправлений.
Далее следует описание различных вариантов применения полезной модели.
При номинальной работе устройства средства управления активируют две ленты 20 и 30, а также два электрических вентиля 24 и 34. Иначе говоря, движение отправлений обеспечивается с двух сторон канала, так же как и силы засасывания.
Если предположить, что в канал 40 заходит единственное отправление, система отслеживания оповещает о его поступлении. Это отправление перемещается вдоль канала при помощи одной или другой из лент. Кроме того, сохраняется активное состояние электрических вентилей.
Теперь предположим, что в канал 40 поступает множественный захват, образованный двумя отправлениями 101 и 102, показанными на фиг.3. Передний торец 101' отправления опережает передний торец 102' отправления 102 относительно направления движения вправо, как показано на фигурах. Кроме того, на фиг.4A-4F показано последовательное положение этих отправлений в зависимости от времени.
В момент ТО (фиг.4А) система отслеживания не наблюдает никакого отправления. Затем в момент Т1 (фиг.4 В) она сигнализирует о поступлении «переднего» отправления 101, находящегося со стороны левой пары лента 20/электрический вентиль 24.
Затем в момент Т2 (фиг.4С) система обнаруживает также присутствие «заднего» отправления 102, находящегося со стороны правой пары лента 3 О/электрический вентиль 34. При этом в момент ТЗ (фиг.4D) подается команда на остановку ленты 30, но при сохранении активного состояния электрического вентиля 34 и, следовательно, связанного с ним вакуумного насоса.
В результате возникает поперечная сила, обозначенная на этой фигуре F1, которая способствует прижатию отправления 102 к ленте 30. Кроме того, электрический вентиль 24, тоже остающийся активным, создает при помощи своего соответствующего вакуумного насоса поперечную силу F'l лежащую на одной оси, но противоположно направленную вышеуказанной силе F1. Это позволяет отделить отправление 102 от отправления 101, с которым оно первоначально было соединено.
Следует отметить, что инерция остановки ленты 30 позволяет отправлению 102 перекрыть существенную часть этой ленты, когда оно оказывается заблокированным на месте. За счет этого сила F1 засасывания, создаваемая электрическим вентилем 34, в основном поглощается этим отправлением 102, поэтому эта сила не мешает силе F'l действовать на другое отправление 101.
В этих условиях в канале 40 продолжает двигаться только переднее отправление 101, как показано стрелкой fl на фиг.4D, в направлении конвейера С.Когда выходной датчик обнаруживает прохождение заднего торца 101" в момент Т4 (фиг.4Е), опять подается команда на активацию ленты 30, при этом отправление 102 возобновляет свое поступательное движение вдоль канала по стрелке Q, пока не попадет на конвейер С.
Наконец, в момент Т5 (фиг.4F) система 60 не обнаруживает никакого отправления. Ленты 20 и 30 остаются активными, как и электрические вентили 24 и 34, и устройство опять оказывается в своем номинальном режиме работы.
Теперь рассмотрим фиг.5 и 6 и предположим, что образовался множественный захват из отправлений 111 и 112, расположенных в обратном порядке по сравнению с предыдущими фигурами. Так, передний торец 112' отправления 112, обращенного к паре перфорированная лента 3 О/электрический вентиль 34, опережает торец 111' отправления 111.
В момент ТО (фиг.6А) система отслеживания не наблюдает никакого отправления. Затем в не показанный на фигурах момент Т1 она сигнализирует только о поступлении «переднего» отправления 112. Затем в момент Т2 (фиг.6 В) система обнаруживает также присутствие «заднего» отправления 111.
При этом подается команда на остановку ленты 20, а также на выключение электрического вентиля 24. Электрический вентиль 34 создает при этом поперечную силу, обозначенную на этой фигуре F2, которая способствует засасыванию одновременно отправлений 111 и 112 в направлении ленты 30, как показано на фиг.6С.
Сразу при обнаружении этого притягивания отправлений к ленте, противоположный электрический вентиль 24 опять активируется, тогда как лента 20 остается в состоянии покоя. За счет этого отправление 111 прижимается к ленте 20 под действием поперечной силы F3, противоположной силе F2 (фиг.6D). Следует отметить, что сила F2 не мешает перемещению отправления 111, так как она по существу поглощается отправлением 112, прижатым к ленте 30.
В этих условиях в канале продолжает двигаться только переднее отправление 112 по стрелке G на фиг.6D. Необходимо отметить, что ленту 30 можно остановить на. короткое время в процессе разделения между отправлениями 111 и 112.
Затем, когда выходной датчик обнаруживает прохождение заднего торца 112" в момент Т4 (фиг.6Е), опять подается команда на активацию ленты 30, и отправление 111 возобновляет свое поступательное движение- вдоль канала по стрелке f4. Следует отметить, что в некоторых вариантах применения засасывающая сила F2 увлекает только отправление 112, тогда как отправление 111 остается вблизи ленты 20. В этом случае переходят непосредственно от конфигурации, показанной на фиг.6 В, к конфигурации, показанной на фиг.6D.
Наконец, в не показанный на фигурах момент Т5 система 60 не обнаруживает никакого отправления, как в случае, представленном на фиг.4F. Ленты 20 и 30 остаются активными, как и электрические вентили 24 и 34, и устройство опять оказывается в своем номинальном режиме работы.
Теперь рассмотрим фиг.7 и 8 и предположим, что образовался множественный захват из отправлений 121 и 122, передние торцы 121' и 122' которых находятся на одном уровне. В момент ТО (фиг.8А) система отслеживания не наблюдает никакого отправления. Затем в момент Т1 (фиг.8 В) она обнаруживает одновременное поступление двух отправлений, то есть данная ситуация аналогична ситуации, соответствующей моменту Т2 в первом случае (см. фиг.4С).
Управление происходит так же, как и в случае, описанном со ссылками на фиг.4D и последующие. Так, в момент Т2 (фиг.8С) подается команда на остановку ленты 30, но электрический вентиль 34 остается активным. Это создает поперечную силу, обозначенную F5 на этой фигуре, которая прижимает отправление 122 к ленте 30, отделяя его от отправления 121, которое остается притянутым к ленте 20 под действием противоположной силы F'5.
В канале продолжает двигаться только отправление 121 по стрелке f5. Когда выходной датчик обнаруживает прохождение заднего торца 121" в момент ТЗ (фиг.8D), опять подается команда на активацию ленты 30, и отправление 122 возобновляет свое поступательное движение вдоль канала по стрелке f6.
Наконец, рассмотрим фиг.9 и 10 и предположим, что множественный захват образован тремя отправлениями 131, 132 и 133, соответственно называемыми передним, промежуточным и задним отправлениями, передние торцы 131', 132' и 133' которых смещены, следуя друг за другом. В момент ТО система не отмечает присутствия какого-либо отправления. Затем в момент Т1 она сигнализирует о поступлении «переднего» отправления 131, находящегося со стороны пары перфорированная лента 20/электрический вентиль 24. Эти два первых этапа аналогичным ранее описанным этапам и на фигурах не представлены.
После этого в момент Т2 (фиг.10А) система 60 обнаруживает присутствие двух дополнительных отправлений 132 и 133. Для упрощения можно предположить, что эти два отправления обнаружены одновременно. При этом вариант применения является таким же, как если бы эти два обнаружения следовали друг за другом.
В момент ТЗ (фиг.10 В) подается команда на остановку ленты 30, при этом электрический вентиль 34 остается активным. Создаваемая поперечная сила F7 прижимает два отправления 132 и 133 к ленте 30, отделяя их от отправления 131, с которым они первоначально были соединены. Это отправление 131 остается прижатым к ленте 20 под действием силы F'7, создаваемой электрическим вентилем 24.
Таким образом, в канале продолжает двигаться только отправление 131 по стрелке f7. Как только выходной датчик обнаруживает прохождение заднего торца 131" в момент Т4 (фиг.10С), правый электрический вентиль 34 деактивируют, и промежуточное отправление 132 притягивается по стрелке F8 к левому электрическому вентилю 24, который остается активным. Выключение электрического вентиля 34 способствует тому, что он не мешает свободному поперечному перемещению отправления 132, передний край которого, выступающий по отношению к заднему отправлению, находился в контакте с правой лентой 30. Кроме того, следует отметить, что заднее отправление остается прижатым к этой ленте 30.
Как только промежуточное отправление входит в контакт с левой лентой 20, правый электрический вентиль опять активируют, сохраняя при этом ленту 30 неподвижной, чтобы удерживать в положении заднее отправление 133. При этом промежуточное отправление 132 удаляют из канала по стрелке f8 на фиг.10С.Когда система 60 обнаруживает прохождение его заднего торца 132" (фиг.10D), заднее отправление 133 опять перемещается лентой 30 по стрелке f9 и выходит из канала.
Наконец, как и в предыдущих вариантах применения, система 60 не обнаруживает никакого отправления. Ленты 20 и 30 остаются активными, как и электрические вентили 24 и 34, и устройство опять находится в своем номинальном режиме работы.
Обработку множественных захватов, образованных отправлениями в количестве более трех, можно осуществлять итеративно, следуя вышеуказанным этапам. Как правило, для захвата из п отправлений, сначала отделяют первое отправление от (п-1) других, затем его удаляют. После этого оставшиеся отправления обрабатывают как вторичный множественный захват, называемый захватом порядка 2. При этом речь идет об отделении единственного отправления от (п-2) других, которые образуют множественный захват порядка 3, обрабатываемый, как было указано выше. По завершении этих этапов получают множественный захват порядка (п-1), образованный только двумя отправлениями, которые разделяют, как было описано выше.
Полезная модель позволяет решить вышеупомянутые задачи. Действительно, использование в основном поперечной силы с целью разделения отправлений, принадлежащих к множественному захвату, имеет свои особые преимущества.
Так, в известном решении, раскрытом в US2009/0218751, разделение этих отправлений происходит за счет трения, то есть при помощи силы, действующей в основном в продольном направлении. Это может привести к повреждению отправлений, особенно непрочных отправлений. Кроме того, описанное в этом документе устройство разделения неизбежно имеет большую длину, так как оно не позволяет производить остановку отправления, отделяемого от множественного захвата.
В отличие от этого решения, согласно полезной модели, сила, действующая в поперечном направлении, обеспечивает надежное отделение, что позволяет гарантировать целостность отправлений. Кроме того, поскольку применение сопровождается четкой остановкой движения отправлений, устройство в соответствии с полезной моделью может иметь разумные продольные размеры.
Реферат
1. Устройство (18) разделения плоских предметов, находящихся в множественном захвате, содержащее вход, выход, зону (40) прохождения предметов, расположенную между указанным входом и указанным выходом, первое (20) и второе (30) средства перемещения указанных предметов в зоне (40) прохождения в определенном направлении (А) перемещения, и первое (24) и второе (34) средства удержания, по меньшей мере, одного первого предмета (101) по отношению, по меньшей мере, к одному второму предмету (102), прилегающему к первому предмету (101), выполненные с возможностью их отделения друг от друга, при этом первое (24) и второе (34) средства удержания связаны соответственно с первым (20) и вторым (30) средствами перемещения, при этом первое (20) и второе (30) средства перемещения имеют находящиеся напротив друг друга приводные стороны и отстоят друг от друга с образованием указанной зоны (40) прохождения предметов в виде капала прохождения, расположенного так, чтобы движение каждого предмета, поступающего в зону (40) прохождения, осуществлялось одним или другим из первого (20) и второго (30) средств перемещения, причем первое (24) и второе (34) средства удержания выполнены с возможностью создания с одной и с другой стороны указанного канала по существу поперечных первой (F'1; F3; F'5; F'7; F8) и второй (F1; F2; F5; F7) сил, расположенных на одной прямой, но противоположных друг к другу, так, чтобы первое средство удержания притягивало и прижимало указанный первый предмет к указанному первому средству перемещения, и чтобы указанное второе средство удержания притягивало и прижимало второй предмет к указанному второму средству перемещения, отличающееся тем, что дополнительно содержит ср
Формула
Комментарии