Электрическая катушка шнура с функцией автоматической подачи и сматывания - RU2298866C2
Код документа: RU2298866C2
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к устройству для сматывания и подачи шнура питания и к способу управления натяжением шнура питания в приборе. Более конкретно, устройство и способ управления натяжением шнура питания предусматривают сматывание и подачу шнура питания при перемещениях прибора относительно электрической розетки.
Уровень техники
В обычном автономном или самоходном приборе или автоматическом устройстве для подачи электрического шнура из прибора его принудительно стягивают с катушки по мере удаления прибора от электрической розетки. Для того, чтобы втянуть шнур в прибор, включается или приводится в действие механизм, который втягивает шнур в прибор с довольно высокой скоростью под воздействием спиральной плоской пружины. При увеличении расстояния между прибором и электрической розеткой спиральная плоская пружина натягивает шнур все сильнее, что вызывает ускоренное обратное втягивание шнура в прибор. Таким образом, в известном самоходном приборе со шнуром имеются недостатки, связанные с подачей шнура из прибора и его втягиванием в прибор.
Раскрытие изобретения
Соответственно, существует потребность в создании нового усовершенствованного устройства и способа подачи и сматывания шнура для решения указанных проблем. Дополнительной задачей, на решение которой направлено настоящее изобретение, является поддержание и контроль минимального усилия натяжения шнура независимо от расстояния между прибором и розеткой.
В одном из аспектов изобретение относится к электрической катушке с функцией автоматической подачи и сматывания шнура. В соответствии с этим аспектом предложено устройство для управления шнуром питания прибора, содержащее кронштейн катушки, на котором установлена с возможностью вращения катушка шнура. Кронштейн электродвигателя установлен с возможностью перемещения относительно кронштейна катушки. Рычажный механизм соединяет кронштейн катушки с кронштейном электродвигателя. Предусмотрен первый электродвигатель для избирательного привода рычажного механизма и перемещения кронштейна электродвигателя относительно кронштейна катушки Предусмотрен второй электродвигатель, расположенный с промежутком от первого электродвигателя, для привода узла, который избирательно вращает катушку шнура по меньшей мере в одном направлении.
В соответствии со вторым аспектом изобретения предложен способ управления натяжением электрического шнура питания прибора, намотанного на вращающуюся катушку шнура, перемещаемую указанным прибором, для обеспечения подачи и сматывания шнура. Способ содержит следующие этапы: определение осевого усилия в шнуре, соответствующего перемещению прибора, избирательное втягивание шнура при отсутствии в шнуре осевого усилия, и избирательная подача шнура при определении осевого усилия заранее установленной минимальной величины.
Перечень фигур чертежей
Изобретение может быть реализовано в физическом плане в различных деталях и механизмах. Далее со ссылками на прилагаемые чертежи будет подробно описан предпочтительный пример осуществления изобретения. На чертежах:
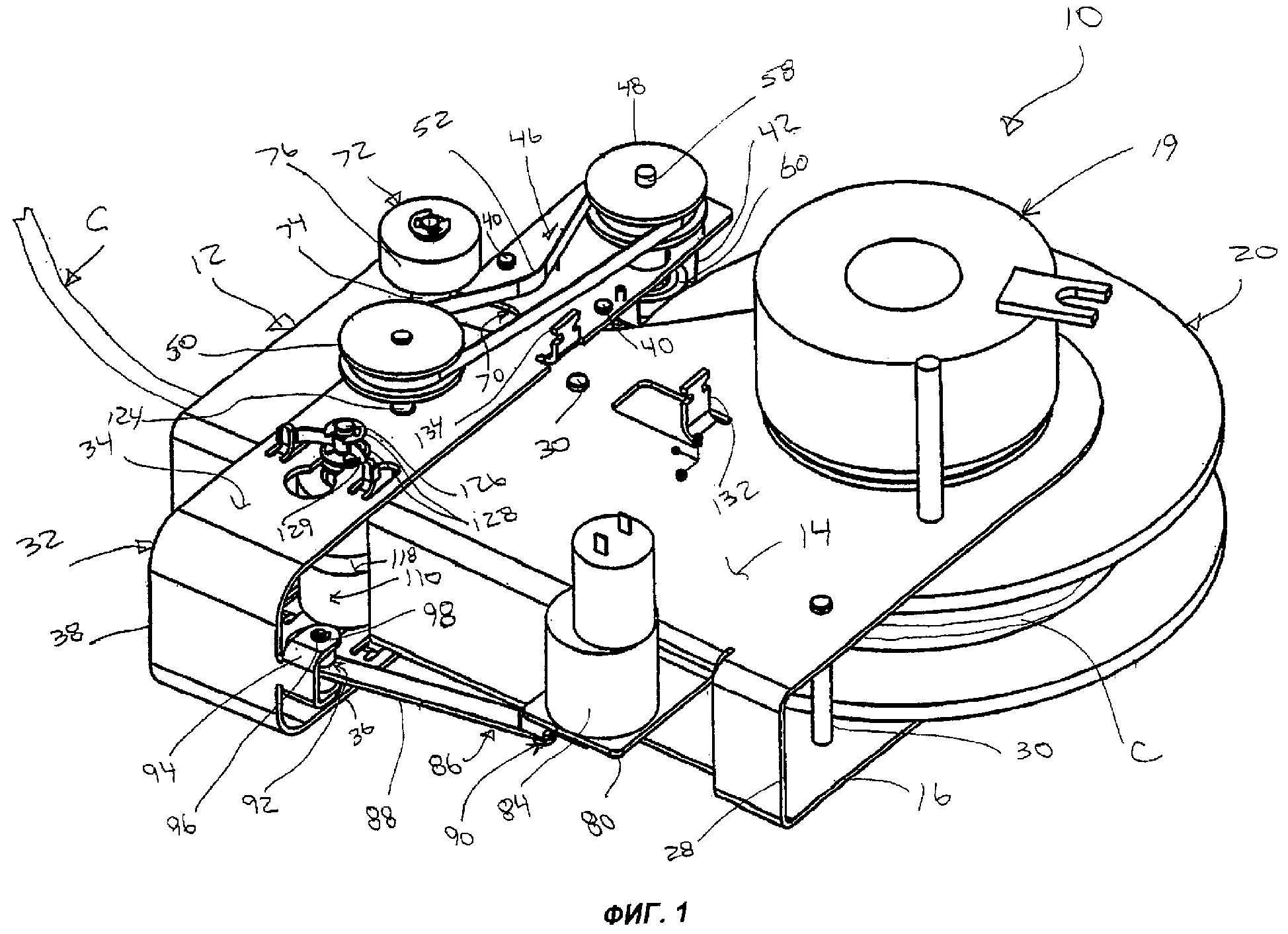
фиг.1 изображает электрическую катушку с функцией автоматической подачи и сматывания шнура на виде сверху в перспективе,
фиг.2 изображает электрическую катушку с функцией автоматической подачи и сматывания шнура на виде снизу в перспективе,
фиг.3 изображает электрическую катушку с функцией автоматической подачи и сматывания шнура на виде сбоку,
фиг.4 изображает в перспективе электрическую катушку с функцией автоматической подачи и сматывания шнура в положении сматывания шнура,
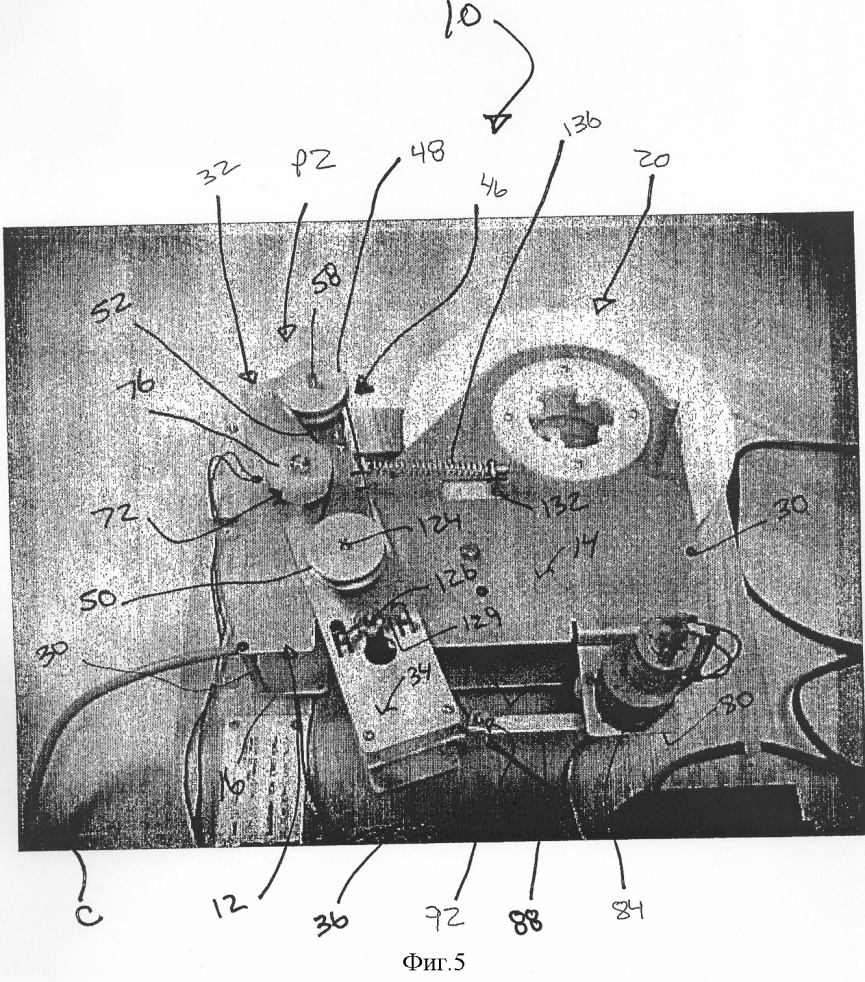
фиг.5 изображает в перспективе электрическую катушку с функцией автоматической подачи и сматывания шнура по фиг.4 в положении подачи шнура,
фиг.6 изображает функциональную схему способа поддержания натяжения в электрической катушке с функцией автоматической подачи и сматывания шнура,
фиг.7 изображает в перспективе электрическую катушку с функцией автоматической подачи и сматывания шнура, смонтированную на приборе.
Сведения, подтверждающие возможность осуществления изобретения
На чертежах представлен предпочтительный пример осуществления изобретения, не вносящий каких-либо ограничений. В этом примере показан конкретный тип катушечного устройства 10 с функцией автоматической подачи и сматывания шнура (управления шнуром), в котором реализовано поддержание натяжения электрического шнура С питания. Устройство может использоваться с прибором любого типа, оснащенным шнуром питания и перемещающимся относительно розетки питающей сети, к которой подключен шнур посредством штепсельного соединения.
Далее будет подробно описано действие устройства и способа по изобретению со ссылками на чертежи. Однако следует понимать, что устройство 10 может иметь другие варианты выполнения, отличные от показанных на чертежах.
На фиг.1 и 2 в перспективе сверху и снизу показано электрическое устройство 10 с функцией автоматической подачи и сматывания шнура С питания, предназначенного для подачи питания на прибор А. В качестве примера прибор может представлять собой автономный пылесос.
Как показано на фиг.1, электрическое устройство 10 с функцией автоматической подачи и сматывания шнура питания содержит кронштейн 12 катушки с верхней пластиной 14, нижней пластиной 16 и втулкой 18 между ними (фиг.2). Катушка или бобина 20 шнура установлена с возможностью вращения на втулке 18 между верхней и нижней пластинами 14 и 16. Втулка 18 может быть снабжена токосъемным кольцом 19, способствующим управлению вращением катушки 20. Верхняя и нижняя пластины 14, 16 соединены между собой соединительной пластиной 28 и множеством жестко прикрепленных к ним опорных стоек 30, проходящих перпендикулярно между пластинами 14, 16. Электрический шнур С питания избирательно сматывается (втягивается) и разматывается (подается) с катушки 20, как будет описано далее.
Устройство 10 управления шнуром содержит также кронштейн 32 электродвигателя, который установлен с возможностью перемещения относительно кронштейна 12 катушки. Как показано на фиг.2, кронштейн 32 электродвигателя содержит верхнюю пластину 34 и нижнюю пластину 36, жестко соединенные между собой соединительной пластиной 38 и опорными стойками 40, проходящими перпендикулярно между пластинами 34, 36. На верхней пластине 34 кронштейна 32 электродвигателя установлена ременная передача 46, показанная на фиг.1. Ременная передача 46 содержит первый шкив 48, второй шкив 50 и огибающий их ремень 52.
Как показано на фиг.3, первый шкив 48 имеет вал 58, проходящий через верхнюю пластину 34 кронштейна 32 электродвигателя. Монтажное устройство 42 для электродвигателя прикреплено к верхней пластине 34. Между верхней пластиной 34 и монтажным устройством 42 на валу 58 установлено фрикционное колесо 60. Под монтажным устройством 42 вал 58 соединен с электродвигателем 68, таким как электродвигатель постоянного тока. Включение электродвигателя 68 обеспечивает вращение вала 58, фрикционного колеса 60 и первого шкива в правом направлении или по часовой стрелке. В одном из примеров выполнения электродвигатель 68 вращается только в одном направлении.
Как показано на фиг.1, верхняя пластина 34 кронштейна 32 электродвигателя содержит криволинейную прорезь 70. На верхней пластине 14 кронштейна 12 катушки установлено натяжное устройство 72, расположенное в непосредственной близости кронштейна 32 электродвигателя. Как показано на фиг.3, натяжное устройство 72 содержит вал 74 и установленное на нем фрикционное колесо 76. Фрикционное колесо 76 расположено на уровне ремня 52 и может вращаться вокруг своего вала 74 при вхождении в избирательный контакт с ремнем 52 и его натяжении. Вал 74 имеет такие размеры и положение, что может входить в криволинейную прорезь 70 на верхней пластине 34 кронштейна 32 электродвигателя.
Как лучше всего видно на фиг.1, кронштейн 12 катушки содержит монтажный фланец 80, несущий электродвигатель 84, который может быть электродвигателем постоянного тока. Электродвигатель 84 может вращаться как по часовой стрелке, так и в обратном направлении, например, при изменении полярности напряжения постоянного тока величиной 12 В, подаваемого на положительную (+) и отрицательную (-) клеммы электродвигателя. Переключение направления вращения электродвигателя 84 может управляться с помощью известного микропроцессора или электронного управляющего устройства (не показаны) с вводом сигналов от комплекта датчиков, связанных с микропроцессором. Подобным же образом избирательное вращение электродвигателя 68 может управляться с помощью микропроцессора с вводом сигналов от комплекта датчиков, связанных с микропроцессором. Датчики могут представлять собой датчики оптического распознавания, использующие оптические (телевизионные) камеры для определения меток на шнуре. В альтернативном варианте датчики могут быть торсионными датчиками или датчиками натяжения в виде датчиков нажимного или тянущего типа. Дополнительно, как показано на фиг.2, могут использоваться два датчика 78, 79 положения, то есть два связанных с микропроцессором микропереключателя, для определения положения кронштейна 32 электродвигателя по отношению к кронштейну 12 катушки.
Разумеется, устройство 10 управления шнуром может работать также в режиме ручного управления, в котором оператор управляет электродвигателями 68, 84 вручную с приоритетом над микропроцессором. Отмена управления от микропроцессора может осуществляться с помощью обычного переключателя (не показан), связанного с микропроцессором. Переключатель может иметь фиксированные позиции для автоматического и ручного режимов. Установка ручного режима позволяет оператору далее избирательно управлять вращением электродвигателей 68, 84. Так, например, обычный кулисный переключатель может использоваться для включения электродвигателя 68 и/или для включения электродвигателя 84. Дополнительно переключатель может иметь «нейтральную» позицию или позицию ожидания для прекращения вращения электродвигателя 68.
Кронштейн 12 катушки и кронштейн 32 электродвигателя связаны между собой рычажным механизмом 86. Он содержит тягу 88, прикрепленную одним концом 90 к электродвигателю 84. Как лучше всего видно на фиг.1, другой конец 92 тяги 88 прикреплен к монтажному кронштейну 94, который прикреплен к соединительной пластине 38 кронштейна 32 электродвигателя. В монтажном кронштейне 94 установлен палец 96, проходящий через тягу 88. Предусмотрены также два зажима 98 для крепления конца 92 тяги в монтажном кронштейне. Таким образом, тяга 88 может совершать шарнирный поворот относительно монтажного кронштейна 94 и монтажного фланца 80.
Как лучше всего видно на фиг.3, между верхней и нижней пластинами 14, 16 кронштейна 12 катушки установлена пара роликов 108, 110, расположенных рядом друг с другом. Каждый ролик имеет боковую поверхность, соответственно, 112, 114 с канавкой 116, 118. Расположение канавок 116, 118 на одном уровне образует по существу круглое отверстие 120, через которое может проходить электрический шнур С. Ролик 108 смонтирован на валу 124, связанном со вторым шкивом 50. Вращение второго шкива 50 приводит во вращение вал 124 и ролик 108. Ролик 110 свободно вращается вокруг оси 126, которая жестко прикреплена к верхней и нижней пластинам 34, 36 с помощью зажимов 128 и опорных элементов 129, установленных около концов оси над пластиной 34 и под пластиной 36. Вращение первого ролика 108, например, по часовой стрелке вызывает вращение второго ролика 110 в противоположном направлении, то есть против часовой стрелки, за счет фрикционного контакта роликов. Фрикционный контакт обеспечивает также сдавливание шнура С роликами 108, 110 для его подачи через отверстие 120.
Кронштейн 32 электродвигателя шарнирно поворачивается вокруг вала 124 первого ролика 108. Как лучше всего видно на фиг.4 и 5, кронштейн 32 электродвигателя шарнирно поворачивается из первого положения Р1 во второе положение Р2 в результате действия электродвигателя 84 и тяги 88. В первом положении Р1 фрикционное колесо 60, укрепленное на валу 58 первого шкива 48, входит во фрикционный контакт с катушкой 20 шнура. Вращение фрикционного колеса 60 по часовой стрелке вращает катушку 20 шнура против часовой стрелки. Это вращение катушки 20 шнура против часовой стрелки вызывает втягивание шнура к катушке и его сматывание на катушку 20. Как показано на фиг.4, в это время ремень 52 между первым и вторым шкивами 48, 50 свободно проскальзывает. Когда катушка 20 приводится во вращение для сматывания шнура С, ролики 108, 110 свободно вращаются. Другими словами, ролики 108, 110 могут свободно вращаться при проходе шнура С через отверстие 120 между ними.
Фиг.5 изображает катушечное устройство 10 во втором положении Р2 подачи шнура. В положении Р2 фрикционное колесо 60 отведено от катушки 20 шнура и позволяет ей свободно вращаться. Одновременно ремень 52 находится в контакте с натяжным роликом 76, что обеспечивает включение ременной передачи 46 и привод во вращение второго шкива 50. Вращение второго шкива 50 по часовой стрелке приводит во вращение первый ролик 108. Шнур С проталкивается между двумя канавками 116, 118 роликов 108, 110. В результате шнур С подается с катушки 20 шнура через отверстие 120.
Как видно на фиг.4 и 5, верхняя пластина 14 кронштейна 12 катушки и верхняя пластина 34 кронштейна 32 электродвигателя содержат монтажные кронштейны 132, 134, к которым прикреплена пружина 136. Пружина 136 создает возвратное усилие, которое способствует перемещению кронштейна 32 электродвигателя из второго положения Р2 в первое положение Р1. Таким образом, кронштейн 32 электродвигателя с усилием переводится в первое положение Р1 и занимает второе положение Р2 только при работе электродвигателя 84.
Далее будет описан способ управления электрическим шнуром С для автономного прибора А со ссылкой на фиг.6.
Прибор А передвигают на участок работы. Затем, для подачи питания на прибор, шнур С подают или разматывают с катушки шнура и его штепсельный конец подключают к электрической розетке. Питание подается через электрический шнур на прибор и электродвигатели катушечного устройства для шнура. Включается датчик для определения осевого усилия в шнуре, соответствующего перемещению прибора. Прибор совершает различные перемещения, в основном к электрической розетке или от нее. Датчики определяют, натянут ли шнур, то есть имеется ли осевое усилие в шнуре.
Если шнур не натянут, то есть имеется слабина, определяется отсутствие осевого усилия, и катушечное устройство включает электродвигатель 68, который прикладывает вращательное усилие для вращения катушки шнура в первом направлении с целью сматывания (втягивания) шнура на катушку. Датчики непрерывно контролируют наличие слабины. В случае таковой катушка шнура продолжает вращаться в первом направлении для сматывания шнура. Если слабина выбрана, электродвигатель 68 находится в режиме ожидания. Если шнур натянут, катушечное устройство включает электродвигатель 84, который переводит кронштейн 32 электродвигателя из первого во второе положение. Теперь включение электродвигателя 68 приводит ременную передачу, когда кронштейн электродвигателя находится во втором положении. Ременная передача передает вращательное усилие на пару роликов, в результате чего ременная передача вращается в первом направлении для разматывания (подачи) электрического шнура между парой роликов.
Датчики непрерывно контролируют осевое усилие в электрическом шнуре. Если шнур все еще натянут, ременная передача продолжает приводить пару роликов и соответственно подавать электрический шнур. Если шнур больше не находится под натяжением, но и слабины тоже нет, электродвигатель 68 переводится в режим ожидания. Если шнур снова ослаблен, электродвигатель 84 включается для перевода кронштейна электродвигателя из второго положения по фиг.5 в первое положение по фиг.4. Указанные этапы повторяются по мере перемещения прибора в различных направлениях. Если шнур более не натянут, но и слабины тоже нет, электродвигатели 68 и 84 находятся в режиме ожидания.
На фиг.7 показан пример установки устройства 10 на приборе А. Прибор в данном примере является пылесосом корпусного типа. Следует отметить, что устройство 10 может быть установлено в вертикальном, горизонтальном или другом положении в приборе А. Кроме того, хотя на чертеже показан пылесос корпусного типа, устройство для управления шнуром питания может использоваться в комбинации с вертикальным пылесосом, аппаратом для чистки ковров, пылесосами для влажной/сухой уборки и с множеством других электрических бытовых приборов, как комнатных, так и для наружного использования. Так например, изобретение может использоваться в электрических газонокосилках и других садовых электроаппаратах от триммеров и инструментов для подрезки изгородей до электропил и подобных инструментов.
Изобретение было описано на примере конкретного варианта осуществления. Для специалиста в данной области понятно, что при реализации изобретения возможны различные изменения и модификации, не выходящие за пределы объема охраны, который определен в формуле изобретения с учетом эквивалентов.
Реферат
Электрическая катушка (10) с функцией автоматической подачи и сматывания шнура для управления шнуром питания прибора содержит кронштейн (12) катушки, на котором установлена с возможностью вращения катушка (20) шнура. Кронштейн (32) электродвигателя установлен с возможностью перемещения относительно кронштейна (12) катушки, а рычажный механизм (86) соединяет кронштейн (12) катушки с кронштейном (32) электродвигателя. Предусмотрен первый электродвигатель (84) для избирательного привода рычажного механизма (86) и перемещения кронштейна (32) электродвигателя относительно кронштейна (12) катушки. Предусмотрен второй электродвигатель (68), расположенный с промежутком от первого электродвигателя (84). Имеется узел, приводимый вторым электродвигателем для избирательного вращения катушки шнура по меньшей мере в одном направлении. 2 н. и 18 з.п. ф-лы, 7 ил.
Комментарии