Способ и устройство для управления наматыванием и разматыванием кабеля в транспортном средстве с электрическим приводом - RU2188489C2
Код документа: RU2188489C2
Чертежи
Описание
Изобретение относится к способу управления наматыванием и разматыванием кабеля в транспортном средстве с электрическим приводом, при котором кабель наматывают путем вращения кабельного барабана с помощью подключенного к нему гидравлического двигателя, а разматывание кабеля с барабана тормозят, используя гидравлический двигатель в качестве гидравлического насоса, благодаря чему наматывание и разматывание соответственно происходят в направлении движения транспортного средства.
Кроме того, изобретение относится к устройству для наматывания и разматывания кабеля в транспортном средстве с электрическим приводом, содержащему кабельный барабан для кабеля, гидравлический двигатель для вращения кабельного барабана во время наматывания кабеля и для торможения его вращения во время разматывания кабеля, гидравлический насос для подачи рабочей жидкости и управляющие клапаны для управления подачей рабочей жидкости в гидравлический двигатель во время наматывания и для дросселирования потока рабочей жидкости во время разматывания кабеля.
Известен способ управления наматыванием и разматыванием кабеля в транспортном средстве с электрическим приводом, при котором кабель наматывают путем вращения кабельного барабана с помощью подключенного к нему гидравлического двигателя, а разматывание кабеля с барабана тормозят путем использования гидравлического двигателя в качестве гидравлического насоса, благодаря чему наматывание и разматывание соответственно происходят в направлении движения транспортного средства (US-PS 4114827А, 19.09.1978).
Известно устройство для разматывания и наматывания кабеля в транспортном средстве с электрическим приводом, содержащее кабельный барабан для кабеля, гидравлический двигатель для вращения кабельного барабана во время наматывания кабеля и для торможения его вращения во время разматывания кабеля, гидравлический насос для подачи рабочей жидкости и управляющие клапаны для управления подачей рабочей жидкости в гидравлический двигатель во время наматывания и для дросселирования потока рабочей жидкости во время разматывания кабеля. (US-PS 4114827А, 19.09.1978).
В транспортных средствах с электрическим приводом, например шахтных загрузчиках и т.д., наматывание и разматывание кабеля, идущего от барабана к источнику электропитания, до настоящего времени регулируют либо путем измерения натяжения кабеля, либо на основе движений кабельного барабана с помощью механической информации. Проблема при таком способе заключается в том, что при попытке управлять наматыванием или разматыванием кабеля с помощью натяжения кабеля система управления всегда опаздывает, потому что она не срабатывает до тех пор, пока кабель не натянется или не провиснет. Кроме того, повороты на изгибах, например, приводят к тому, что кабель волочится по полу, поскольку система не наматывает или не разматывает кабель, потому что при поперечном движении кабель не натягивается и не провисает так, как это происходит при движении прямо вперед. Медленное управление также приводит к тому, что кабель может подвергаться неожиданным, внезапным и очень сильным деформациям, вследствие чего он может ломаться или подвергаться другим повреждениям. Другая проблема при известном способе заключается в том, что системы гидравлического управления и подачи усложнены, легко выходят из строя и дороги.
Задача настоящего изобретения состоит в том, чтобы разработать способ и устройство для наматывания кабеля на барабан и разматывания с него в транспортном средстве с электрическим приводом, с помощью которых исключаются недостатки известных технических решений и можно управлять наматыванием и разматыванием настолько хорошо, насколько это возможно. Конкретная задача этого изобретения состоит в том, чтобы исключить изменения натяжения кабеля, вызываемые большой массой кабельного барабана, и его изменение при ускорении и торможении транспортного средства, поддержать натяжение кабеля по возможности одинаковым, несмотря на большое изменение диаметра кабельного барабана, и увеличить срок службы кабеля от нескольких сотен часов до нескольких тысяч часов.
Для решения указанной задачи предлагается способ управления наматыванием и разматыванием кабеля в транспортном средстве с электрическим приводом, при котором кабель наматывают путем вращения кабельного барабана с помощью подключенного к нему гидравлического двигателя, а разматывание кабеля с барабана тормозят путем использования гидравлического двигателя в качестве гидравлического насоса, благодаря чему наматывание и разматывание соответственно происходят в направлении движения транспортного средства, при этом наматыванием и разматыванием кабеля соответственно управляют на основе положения приводного и/или рулевого управляющего средств транспортного средства посредством блока управления, непрерывно отслеживающего сигналы с датчиков, определяющих количество кабеля и крайние положения управляющего рычага, который поворачивается относительно оси вращения кабельного барабана, и тем, что во время наматывания кабеля в гидравлический двигатель подают рабочую жидкость из источника рабочей жидкости, причем объемный расход рабочей жидкости регулируют на основе положения указанных приводного и рулевого управляющего средств транспортного средства.
В соответствии с предпочтительным вариантом осуществления изобретения во время разматывания кабеля гидравлический двигатель подсоединен так, что является частью замкнутого контура, содержащего клапан разматывания, ограничивающий поток рабочей жидкости, за счет чего дросселирование потока рабочей жидкости, вызываемое клапаном разматывания, регулируют на основе положения указанных приводного и рулевого управляющего средств транспортного средства.
Для решения задачи предлагается устройство для разматывания и наматывания кабеля в транспортном средстве с электрическим приводом, содержащее кабельный барабан для кабеля, гидравлический двигатель для вращения кабельного барабана во время наматывания кабеля и для торможения его вращения во время разматывания кабеля, гидравлический насос для подачи рабочей жидкости и управляющие клапаны для управления подачей рабочей жидкости в гидравлический двигатель во время наматывания и для дросселирования потока рабочей жидкости во время разматывания кабеля, причем предусмотрен только один клапан разматывания, который соединен последовательно с гидравлическим двигателем с возможностью регулировать противодавление рабочей жидкости, протекающей через гидравлические двигатель, а значит, и сопротивление вращению гидравлического двигателя во время разматывания кабеля с барабана, и один клапан наматывания, выполненный с возможностью регулировать соответственно количество рабочей жидкости, поступающей в гидравлический двигатель во время наматывания кабеля, причем устройство содержит блок управления, к которому подсоединены датчики, определяющие количество кабеля и крайние положения управляющего рычага, с возможностью управления клапанами разматывания и наматывания во время разматывания и наматывания кабеля соответственно, и по меньшей мере часть приводного и рулевого управляющего средств транспортного средства подсоединены с возможностью управления блоком управления.
Согласно одному из предпочтительных вариантов осуществления изобретения клапан разматывания и гидравлический двигатель соединены последовательно друг с другом с возможностью образования контура для потока рабочей жидкости, а клапан разматывания подсоединен с возможностью регулирования до величины давления большей, чем давление подачи гидравлического насоса во время наматывания кабеля.
Гидравлический насос является насосом с объемным расходом, регулируемым давлением, а клапан наматывания подсоединен с возможностью управления гидравлическим насосом в соответствии с сигналами, формируемыми блоком управления, причем канал для рабочей жидкости, идущий от гидравлического насоса, подсоединен к гидравлическому контуру, образованному посредством гидравлического двигателя и клапана разматывания, с помощью обратного клапана, предотвращающего протекание рабочей жидкости из указанного контура к гидравлическому насосу во время разматывания кабеля.
Согласно другому варианту осуществления изобретения к гидравлическому контуру, проходящему через гидравлический насос и клапан разматывания, подсоединены два обратных клапана, установленные в противоположных направлениях, а параллельно к обратным клапанам подсоединен датчик разности давлений, указывающий разность давлений рабочей жидкости на обратных клапанах и таким образом направление потока рабочей жидкости, причем датчик разности давлений подсоединен с возможностью управления блоком управления.
В соответствии с еще одним вариантом к блоку управления подсоединен избиратель переключения передач, сигнал которого, указывающий на использование передачи, подается с возможностью управления разматыванием или наматыванием кабеля через блок управления.
Согласно предпочтительному варианту тормозные средства подсоединены с возможностью управления блоком управления, при этом тормозные средства формируют сигналы, с помощью которых блок управления управляет разматыванием или наматыванием кабеля.
В другом варианте тормозные средства оснащены двумя детекторами усилия торможения, указывающими усилие торможения, и таким образом управляющими блоком управления во время разматывания и наматывания кабеля соответственно.
Устройство для разматывания и наматывания кабеля содержит датчики, определяющие угол поворота управляющего рычага кабеля и управляющие блоком управления на основе угла поворота управляющего рычага, за счет чего блок управления подсоединен с возможностью управления разматыванием или наматыванием кабеля на основе сигналов, сформированных датчиками.
В предпочтительном варианте устройство содержит по меньшей мере один датчик, определяющий количество кабеля на барабане и подсоединенный с возможностью управления блоком управления таким образом, что когда кабель почти сошел, блок управления останавливает транспортное средство в заранее определенном месте.
Основополагающая идея изобретения заключается в том, что наматыванием кабеля на барабан или разматыванием его с барабана управляют на основе работы приводного и рулевого управляющего средств транспортного средства и путем измерения количества кабеля на кабельном барабане, вследствие чего можно применить программируемое логическое устройство к наматыванию и разматыванию кабеля на основе свойств транспортного средства, предпочтительно с помощью таблицы, хранящейся в памяти управляющего логического устройства. Далее наматывание и разматывание кабеля можно организовать так, что кабель будет наматываться и разматываться с той же скоростью, с какой движется транспортное средство, когда его ускоряют или тормозят. Это предотвращает необязательную деформацию кабеля в любой ситуации вождения и в то же время исключает волочение кабеля при повороте транспортного средства.
Изобретение будет описано более подробно со ссылками на прилагаемые чертежи, где фиг. 1 схематически изображает рабочую систему наматывания кабеля в соответствии с изобретением, а фиг. 2 схематически изображает то, как систему, показанную на фиг. 1, подключают к приводному средству транспортного средства способом, соответствующим изобретению.
На фиг. 1 показан кабельный барабан 1, имеющий намотанный на него кабель 2. Кабель 2 наматывают на барабан и разматывают с барабана между отдельными направляющими роликами 3. Кабельный барабан вращается или его вращение тормозится с помощью гидравлического двигателя 4. Также имеется гидравлический насос 5, который является насосом с объемным расходом, регулируемым давлением. Для управления насосом во время наматывания имеется клапан 6 наматывания, регулирующий давление управляющего канала гидравлического насоса 5, а значит, и количество рабочей жидкости, подаваемой насосом в соответствии с ситуацией вождения транспортного средства, управляемого отдельным управляющим логическим устройством. Кроме того, на фиг. 1 изображен клапан 7 разматывания, регулирующий противодавление во время разматывания кабеля таким образом, что натяжение кабеля остается требуемым в соответствии с условиями и ситуацией вождения транспортного средства. На фиг. 1 также показаны сдвоенные обратные клапаны 8, параллельно которым установлен датчик 9 разности давлений, измеряющий давление. Во время разматывания кабеля соединение, показанное на фиг. 1, работает таким образом, что гидравлический двигатель 4 кабельного барабана 1 служит тормозящим гидравлическим насосом, подсоединенным к замкнутому гидравлическому контуру. Из гидравлического двигателя 4 рабочая жидкость течет по каналу 10 к сдвоенному обратному клапану 8, а через канал 11 - также к клапану 7 разматывания, значение давления которого регулируется в соответствии с ситуацией вождения транспортного средства. Клапан 7 разматывания содержит три сектора 7а-7с, причем сектор 7а является регулирующим сектором, управляемым логическим устройством и дополнительно содержащим регуляторы 7b и 7с максимального и минимального давления, выполненные в виде пружин. Регулятор 7с минимального давления гарантирует, что наматывание происходит в ситуациях неисправностей, за счет чего машину можно останавливать в случае электрической неисправности до того, как будет поврежден кабель. С другой стороны, установка максимального давления гарантирует, что система не будет подвергаться избыточному давлению по какой бы то ни было причине. Чтобы предотвратить неуправляемое разматывание кабеля, давление, действующее через клапан 7 разматывания, всегда должно быть больше нуля. Из клапана 7 разматывания рабочая жидкость течет дальше через канал 12 обратно в гидравлический двигатель 4. Давление клапана 7 разматывания регулируется в соответствии со скоростью транспортного средства путем использования положения его избирателя переключения передач и положения его сцепления привода. Если происходит торможение транспортного средства, давление клапана 7 разматывания вырастает настолько, что скорость вращения кабельного барабана соответственно замедляется, и кабель не может свободно разматываться. Двойной обратный клапан 8 и датчик 9 разности давлений служат в качестве защитных устройств, что препятствует неправильному срабатыванию, когда рулевое управление транспортным средством противоречит действительному направлению его движения. В ситуациях, когда транспортное средство пытается двигаться вперед, индикаторы, подсоединенные к системе управления, показывают, что нужно разматывать кабель с барабана. Если в этой ситуации наклон холма назад заставляет транспортное средство скользить назад к подножию холма, это приводит к возникновению давления через сдвоенные возвратные клапаны, которое указывается датчиком 9 разности давлений. Этот сигнал отменяет все остальные управляющие сигналы и переключает кабельный барабан на наматывание кабеля, чтобы предотвратить его переезд колесами транспортного средства. Клапан 6 наматывания содержит регулирующий сектор 6а, управляемый логическим устройством, и регулятор 6b минимального давления, регулируемый посредством пружины. Регулятор 6b минимального давления регулирует минимальную величину давления, подаваемого насосом, причем эта величина составляет 60 бар (6 МПа) в приводимом примере. Гидравлический поток насоса 5 регулируется давлением, причем скорость потока (расход) зависит от ситуации вождения. Когда транспортное средство не движется, т.е. барабан 1 не вращается, расход насоса устанавливается на ноль. Во время разматывания кабеля 2 с барабана 1 регулирующий сектор 6а не управляется, благодаря чему давление насоса всегда составляет 60 бар (6 МПа) в соответствии с управлением от регулятора 6b. Поскольку давление в двигателе 4 барабана 1 всегда превышает 60 бар (6 МПа) во время разматывания кабеля, насос всегда установлен на нулевую производительность и гидравлический поток через насос отсутствует. Чтобы обеспечить эту функцию, соединение дополнительно содержит обратный клапан 13, размещенный между гидравлическим насосом 5 и каналом 11. Управляющий канал гидравлического насоса 5 подсоединен к нагнетательному каналу клапана 6 наматывания, и они оба подсоединены к нагнетательному каналу гидравлического насоса 5 через дроссель 15.
При наматывании кабеля, т.е. когда транспортное средство движется к размотанному кабелю, гидравлическим насосом управляют в соответствии с рулевым управляющим и приводным средствами транспортного средства соответственно. Тогда величину давления клапана 6 наматывания регулируют таким образом, что гидравлический насос 5 подает рабочую жидкость через обратный клапан 13 и далее через канал 10 в гидравлический двигатель 4. Из гидравлического двигателя 4 рабочая жидкость течет в контейнер 14 для гидравлической жидкости. Во время наматывания установку давления клапана 7 разматывания регулируют до такой величины, что гидравлическая жидкость не может протекать через него в нормальных условиях. Во время ускорения производительность и давление гидравлического насоса увеличивают, чтобы обеспечить возможность согласования скорости вращения барабана 1 с количеством наматываемого на него кабеля. Поскольку длина одного витка намотанного кабеля изменяется в соответствии с количеством кабеля, намотанного на кабельный барабан, управление также предусматривает наличие датчиков, показывающих количество кабеля на кабельном барабане; функция и работа этих датчиков будут описаны точнее в связи с фиг. 2. Посредством этих датчиков можно, с одной стороны, управлять скоростью вращения кабельного барабана в соответствии с текущими потребностями, а с другой стороны, останавливать транспортное средство, когда кабель полностью размотан прежде, чем кабель подвергнется воздействию избыточных усилий.
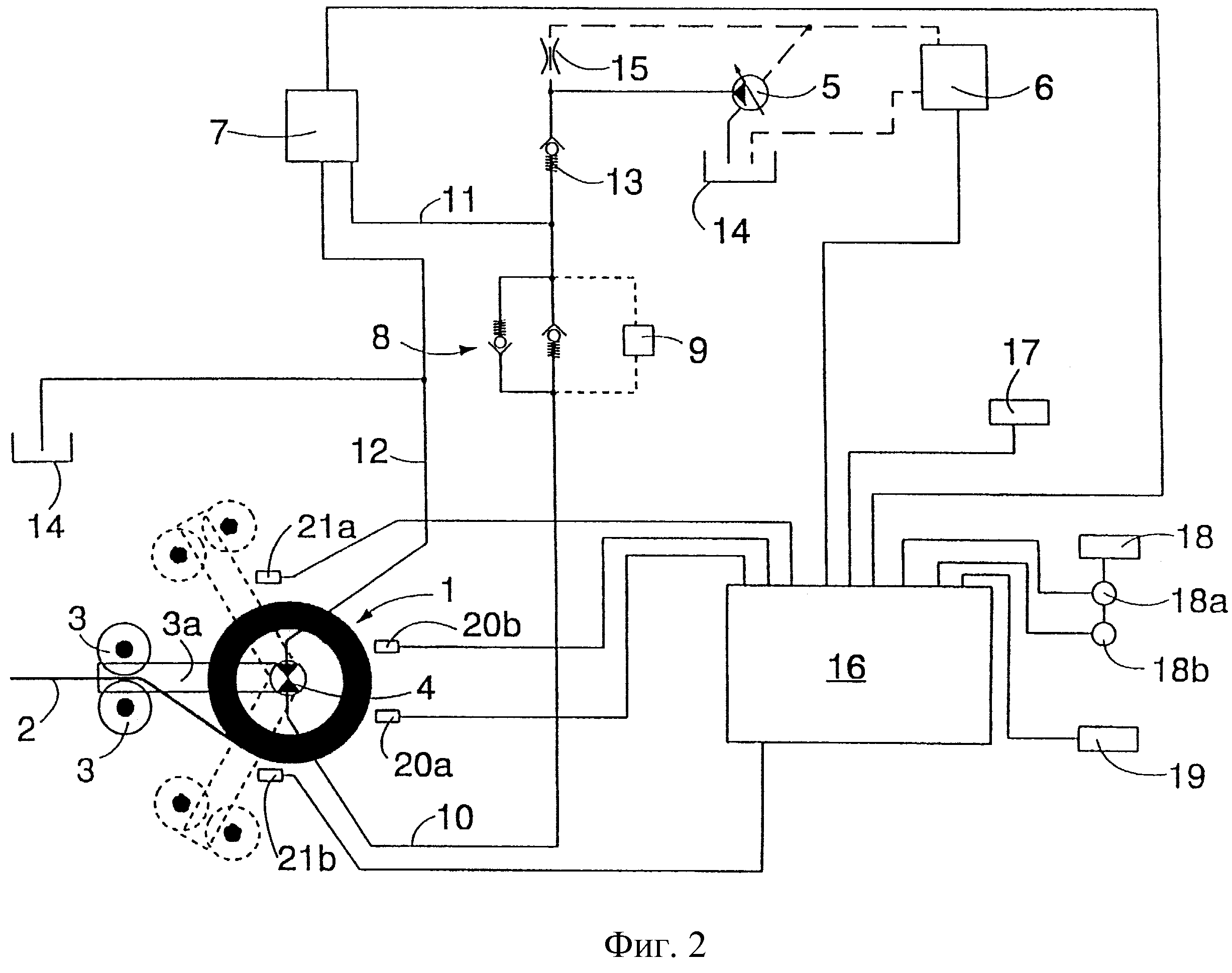
На фиг. 2 более подробно показана структура гидравлического соединения, показанного на фиг. 1, и связанное с ней электрическое управление. На фиг. 2 использованы те же позиции для идентичных частей, что и на фиг. 1.
На фиг. 2 показано, как направляющие ролики кабеля соединены с отдельным управляющим рычагом 3а, который может поворачиваться относительно оси вращения кабельного барабана 1. Поворот управляющего рычага 3а можно наблюдать и учитывать во время наматывания и разматывания кабеля. На фиг. 2 показаны блок 16 управления, принадлежащий средствам управления, который принимает управляющий сигнал из избирателя 17 переключения передач, педаль 18 тормоза и сцепление 19 привода. Сцепление 19 привода обычно бывает педального типа и используется в начале движения, а также при изменении направления движения или диапазона скорости. Это сцепление функционирует таким образом, что оно может обеспечить отвод части тяговой мощности транспортного средства, а затем автоматически замыкается и передает всю тяговую мощность на валы. Вообще говоря приводной двигатель транспортного средства вращается с постоянной скоростью, благодаря чему ускорение и скорость движения зависят от выбранной передачи. Сцепление привода только показывает, задействован привод или нет. Благодаря такой конструкции легко табулировать различные скорости движения и ситуации вождения, так что сигналы, формируемые различными регуляторами и контроллерами, можно объединить в заранее определенную рабочую величину для управления наматыванием кабеля. Тогда можно использовать несколько разных таблиц, содержащих необходимые величины давления, вычисленные для каждой ситуации вождения, чтобы преодолеть силы инерции кабельного барабана. К числу рассматриваемых аспектов следует отнести диаметр кабельного барабана, т.е. массу барабана, зависящую от него, ускорение с выбранной передачей, положение управляющего рычага, тормозное давление, положение сцепления привода, сигналы, формируемые различными защитными устройствами, и количество кабеля на барабане. Блок 16 управления также подсоединен к датчику 9 разности давлений, указывающему давление на двойном обратном клапане 8, и на этой основе направление наматывания кабеля. Педаль 19 тормоза выдает свое давление либо непосредственно, либо используются ограничивающие давление детекторы 18а и 18b в соответствии с фиг. 2, причем определяемые ими пределы давления отличаются друг от друга. Далее к блоку 16 управления подсоединены датчики 20, определяющие количество кабеля, и датчики 21а и 21b, определяющие крайние положения управляющего рычага 3а. Блок 16 управления непрерывно отслеживает сигналы из этих датчиков и управляет на основании этих сигналов электрически управляемыми клапаном 6 наматывания и клапаном 7 разматывания соответственно.
При ускорении транспортного средства путем нажатия сцепления 19 привода блок 16 управления замечает это и посредством клапана 6 наматывания на основе этого осуществляет регулирование управляющего давления, а значит, и производительности гидравлического насоса 5 в сторону увеличения во время наматывания кабеля, благодаря чему скорость вращения кабельного барабана 1 увеличивается с тем же ускорением, что и скорость транспортного средства. Таким образом, транспортное средство не обгоняет кабель и он остается под подходящим натяжением и наматывается в соответствии со скоростью транспортного средства. Во время торможения управляющее давление управляющего клапана 6, а значит, и подача рабочей жидкости гидравлического насоса 5 снижаются, благодаря чему наматывание соответственно становится медленнее. Во время разматывания кабеля с барабана нажатие сцепления 9 привода формирует в блоке 16 управления управляющий сигнал, уменьшающий давление клапана 7 разматывания, и таким образом обеспечивает более легкое разматывание кабеля с барабана. Во время разматывания, конечно, осуществляется управление производительностью гидравлического насоса 5 таким образом, чтобы она была равной нулю, и насос практически отключен от цепи гидравлического двигателя 4 кабельного барабана 1. Во время торможения он выдает в блок управления сигнал, который отличается в зависимости от того, с менее значительным или более значительным усилием осуществляется торможение. В соответствии с тем, определяется ли тормозное усилие ограничивающим давление детектором 18a или 18b, блок 16 управления затем управляет величиной давления клапана 7 разматывания так, чтобы оно стало более или менее выше, чем мгновенная величина давления, и таким образом замедляет вращение кабельного барабана 1 и предотвращает свободное разматывание кабеля.
Когда выбирают другую скорость передачи редуктора с помощью избирателя 17 переключения передач, блок 16 управления учитывает это и управляет установкой давления либо клапана 6 наматывания, либо клапана 7 разматывания так, чтобы обеспечить соответствие изменяющейся скорости движения.
Посредством решения, соответствующего изобретению, можно регулировать наматывание и разматывание кабеля таким образом, что в случае, если изменяется положение какого-либо приводного средства транспортного средства, блок 16 управления по существу немедленно прогнозирует поведение транспортного средства и управляет кабельным барабаном 1 без затрат времени на значительное изменение натяжения кабеля 2. В этом случае предотвращаются и исключаются волочение и поломка кабеля и переезд его транспортным средством, потому что предотвращаются излишне резкое натяжение и провисание кабеля под транспортным средством. Поворот транспортного средства и во время разматывания и во время наматывания кабеля можно учесть с помощью датчиков 21 а и 21b, указывающих положение управляющего рычага 3а. В конкретном варианте осуществления, изображенном на фиг.2, эти датчики только указывают крайние положения управляющего рычага 3а, но если необходимо, то путем подходящего измерения можно учесть углы поворота управляющего рычага между крайними положениями и положением, непосредственно указывающим направление транспортного средства. Когда кабель почти сошел с барабана, датчики 20а и 20b обнаруживают наступающую ситуацию. Затем датчики 20а и 20b сигнализируют, например - с помощью звукового или светового сигнала, о том, что на кабельном барабане 1 практически нет кабеля. Таким же образом датчики 20а и 20b заставляют блок 16 управления остановить двигатель транспортного средства и автоматически привести в действие стояночные тормоза незадолго до полного разматывания кабеля с барабана. Это не дает водителю случайно порвать кабель. Когда датчики 20а и 20b служат в качестве счетчика оборотов, мгновенная длина кабеля 2 на барабане 1, а также соответствующая масса кабельного барабана известны во всех ситуациях вождения. Датчики 20а и 20b установлены на кузове транспортного средства таким образом, что они также cоблюдают направление вращения барабана 1, и это свойство можно использовать в качестве меры безопасности. Прогнозируемое направление вращения получают, исходя из положения избирателя 17 переключения передач и управляющего рычага 3а.
В вышеизложенном описании и на фиг.1,2 приведен лишь пример изобретения, никак не ограничивающий его. Работу блока управления и связь различных приводных средств транспортного средства с блоком управления можно осуществлять разными путями. Например, можно получать тормозное давление непосредственно с педали тормоза или, как показано на фиг. 2, можно получать заранее определенные величины давления посредством ограничивающих переключателей. Аналогично количество витков на кабельном барабане можно замерять путем подсчета количества витков и коррекции разматывания и наматывания кабеля соответственно согласно среднему диаметру витка кабеля, о котором идет речь. Угол поворота управляющего рычага 3а можно указывать либо как непосредственный угол поворота, либо на подходящих шагах между крайними положениями. В транспортных средствах, где используют обычную педаль газа для регулирования скорости движения транспортного средства, можно, в свою очередь, учитывать положение педали газа, которое можно определять различными способами в зависимости от требуемой точности. Даже если это затрудняет использование табуляции при управлении, ее все же можно реализовать.
Реферат
Изобретение относится к области электротехники. Способ и устройство для управления наматыванием и разматыванием кабеля в транспортном средстве с электрическим приводом. При этом способе наматыванием и разматыванием кабеля соответственно управляют на основе приводного и/или рулевого управляющего средств транспортного средства. Устройство содержит только один клапан разматывания, который соединен последовательно с гидравлическим двигателем и посредством которого противодавление рабочей жидкости, протекающей через гидравлический двигатель, можно регулировать во время разматывания кабеля с барабана, и один клапан наматывания, соответственно посредством которого количество гидравлической жидкости, поступающей в гидравлический двигатель, можно регулировать во время наматывания кабеля. Техническим результатом является исключение изменения натяжения кабеля и его изменение при ускорении и торможении транспортного средства, поддержание натяжения кабеля одинаковым. 2 с. и 9 з.п.ф-лы, 2 ил.

Комментарии