Бобиномотальное устройство - RU2339564C2
Код документа: RU2339564C2
Чертежи












Описание
Изобретение относится к бобиномотальному устройству для получения бобины посредством намотки нити или ленточки на сердечник бобины согласно ограничительной части п.1 формулы.
Бобиномотальные устройства служат для намотки нитей или ленточек на сердечник бобины, имеющий в большинстве случаев цилиндрическую или коническую форму. У известного, изображенного на фиг.1 на виде сбоку бобиномотального устройства нить 1 попадает непосредственно после ее выработки к первому направляющему ролику 2 бобиномотального устройства. Оттуда нить 1 движется дальше к так называемому компенсирующему валику 3, который представляет собой подпружиненный, отклоняющийся направляющий ролик, огибает компенсирующий валик и натягивается. От компенсирующего валика 3 нить 1 движется дальше к дополнительному направляющему ролику 4, а оттуда - к направляющему аппарату 5. Направляющий аппарат включает в себя нитенаправляющие элементы 6, которые могут быть выполнены в виде дужки защиты от перебега, и прижимной валик 7, который прижимает нить 1 в начале процесса намотки бобины сначала к периферийной поверхности сердечника 8 бобины, а затем, пока из подаваемой нити образуется бобина 9, - к периферии образующейся бобины 9. Сердечник 8 установлен с возможностью вращения вокруг оси А вращения. На направляющем аппарате 5 между нитенаправляющими элементами 6 и прижимным валиком 7 установлен нитеводитель 10, который возвратно-поступательно перемещает нить аксиально по бобине, обеспечивая, таким образом, равномерное образование бобины по заданной намоточной схеме. Для того чтобы поддержать равномерное усилие прижима прижимного валика 7 к бобине 9 при увеличении ее диаметра D, направляющий аппарат 5 установлен с возможностью поворота вокруг оси С поворота и компенсации, таким образом, увеличивающегося диаметра бобины. Стрелка ρ (D) обозначает угол поворота направляющего аппарата 5 в зависимости от диаметра D бобины.
Бобина 9 или сердечник 8 приводится во вращение электродвигателем (не показан) с угловой скоростью Ω. Для качества намотки бобины решающим является натяжение нити 1 во время намотки на бобину 9. При ослаблении натяжения нити необходимо повысить частоту вращения электродвигателя для восстановления нужного натяжения. Для регулирования частоты вращения электродвигателя служит компенсирующий валик 3, который благодаря тому, что он подпружинен, также сам заботится об определенной компенсации натяжения нити. Когда компенсирующий валик 3 из-за ослабления натяжения нити 1 опускается, это вызывает повышение частоты вращения электродвигателя. Когда компенсирующий валик 3 из-за повышения натяжения нити поднимается, частота вращения электродвигателя уменьшается. Изменения натяжения нити, делающие необходимыми изменения частоты вращения электродвигателя, возникают тогда, когда диаметр D бобины увеличивается или когда вырабатывание нити и тем самым подача нити к бобиномотальному устройству ускоряются или замедляются.
Другая причина колебаний натяжения нити заключается в осевом перемещении нитеводителя 10, как это поясняется на фиг.2 в перспективе. На фиг.2 изображен путь нити 1 от направляющего ролика 4 через нитенаправляющий элемент 6 в виде прямой дужки защиты от перебега, по нитеводителю 10 и прижимному валику 7 к бобине 9. Когда нитеводитель 10 при своем осевом возвратно-поступательном движении находится на концах бобины, нить 1 подается к краю бобины и описывает при этом более длинный путь от направляющего ролика 4 к краю бобины, чем когда нитеводитель 10 находится в середине бобины, а нить 1 описывает при этом путь от направляющего ролика 4 к середине бобины (обозначено штрихпунктиром). За счет сокращения пути нити она ослабляется в середине бобины. Поскольку, как правило, осевое перемещение нити происходит с относительно высокой частотой, вызванное этим колебание натяжения нити нельзя компенсировать регулированием частоты вращения приводного двигателя бобины, т.к. любой регулятор, например ПИД-регулятор, был бы слишком медленным или в таких условиях был бы склонен к раскачиванию, т.е. нестабильной регулировочной характеристике. Влияние разных по длине путей нити на краю и в середине бобины на натяжение нити до сих пор удавалось поэтому поддерживать в пределах только за счет как можно большего расстояния между направляющим роликом 4 и прижимным валиком 7. При увеличении расстояния уменьшается угол, заключенный между направляющим роликом 4 и обеими положениями нити 1 на краях бобины, и тем самым также коэффициент (косинус) изменения длины.
Обратившись снова к фиг.1, можно обнаружить, что в зависимости от диаметра D бобины изменяется длина х(ρ) пути нити между неподвижным направляющим роликом 4 и закрепленным на направляющем аппарате 5 нитенаправляющим элементом 6, поскольку увеличение диаметра бобины приводит к отклонению направляющего аппарата 5 в направлении направляющего ролика 4. Точно так же с отклонением направляющего аппарата 5 изменяется расстояние z(ρ) между расположенным на направляющем аппарате 5 прижимным валиком 7 и неподвижным направляющим роликом 4. Расстояние у между прижимным валиком 7 и нитенаправляющим элементом 6 остается постоянным независимо от поворота направляющего аппарата 5.
Последствия неправильных натяжений нити на качество бобины огромны. Здесь не следует подробно останавливаться на выборе натяжения нити при намотке, однако, в целом, можно сказать, что неправильное натяжение нити и особенно изменяющееся натяжение нити между краем и серединой бобины приводит к тому, что нить падает с края бобины, как показано на фиг.3. На фиг.3 видно, что нить упала с края бобины 9 на сердечник 8 и впоследствии намоталась бы на него. Это падение нити уже в процессе изготовления бобины сказалось бы на производительности и привело бы к остановкам станка или же при последующем использовании бобины, например при зарабатывании в ткань, - к остановкам или повреждения станка.
То, что нить не падает, является одним из важнейших признаков бобины. Однако у известных бобиномотальных устройств было трудно удовлетворительным образом выполнить этот критерий. В частности, из-за высокой частоты намотки было невозможно компенсировать колебания натяжений нити между краем и серединой бобины за счет систем регулирования электродвигателя.
Изобретение поставило поэтому своей задачей создание бобиномотального устройства, которое устраняло бы названные недостатки и на котором можно было бы наматывать бобины существенно более высокого качества.
Бобиномотальное устройство для получения бобины посредством намотки нити или ленточки на сердечник бобины согласно изобретению включает в себя держатель для удержания и вращения сердечника бобины вокруг оси вращения, нитеприжимные элементы для прижатия нити или ленточки к периферийной поверхности бобины, образующейся на сердечнике, причем нитеприжимные элементы установлены, по существу, радиально подвижными по отношению к оси вращения и выполнены предпочтительно в виде прижимного валика с ориентированной параллельно оси вращения продольной осью, расположенный вблизи нитеприжимных элементов нитеводитель для возвратно-поступательного движения нити или ленточки вдоль оси вращения и нитеподдерживающие элементы, которые направляют подаваемую к бобине нить аксиально неподвижно по отношению к оси вращения. Решение согласно изобретению состоит в том, что нитеприжимные элементы сообща с нитеподдерживающими элементами установлены, по существу, радиально подвижными по отношению к оси вращения, так что расстояние между нитеприжимными и нитеподдерживающими элементами остается постоянным. Благодаря этой мере исключается влияние возрастающего при намотке диаметра бобины на натяжение нити.
Следует упомянуть, что в нижеследующем описании в большинстве случаев употребляется термин «нить». Его следует понимать, однако, в данном контексте так, что он подразумевает также ленточки. В качестве примера выполнения ленточки следует назвать вытянутую, одно- или многослойную полимерную ленточку.
Далее следует упомянуть, что сердечник бобины представляет собой в большинстве случаев элемент из картона, пластика или металла, закрепляемый на установленном с возможностью вращения держателе и образующий опору для наматываемой нити. В некоторых случаях, однако, держатель может быть выполнен в виде веретена, на которое непосредственно наматывают нить, а после получения бобины ее снимают с веретена. В таких случаях термин «сердечник бобины» относится, как здесь сказано, к веретену.
Хотя можно расположить нитеводитель без дополнительной поддержки нити между нитеприжимными и нитеподдерживающими элементами, для более спокойной подачи нити на бобину предпочтительно, если между нитеприжимными и нитеподдерживающими элементами расположен, по меньшей мере, один нитенаправляющий элемент, который сообща с нитеприжимными и нитеподдерживающими элементами выполнен радиально подвижным по отношению к оси вращения. При этом нитенаправляющий элемент может быть выполнен в качестве средства компенсации пути нити, которое компенсирует разный по длине путь нити от нитеподдерживающего элемента к нитеприжимному элементу между краем и серединой бобины, как это более подробно поясняется ниже. В таком очень стабильном и надежном варианте средство компенсации пути нити выполнен в виде криволинейной с заданным радиусом дужки защиты от перебега. В соответствии с уровнем техники выполнение средства компенсации пути нити в виде дужки защиты от перебега в форме дуги окружности удалось оптимизировать только для определенного диаметра бобины, при котором радиус дужки защиты от перебега был согласован с расстоянием между нитеподдерживающим элементом и дужкой, тогда как при увеличении или уменьшении этого определенного диаметра бобины возникали разные по длине пути нити между краем и серединой бобины. Согласно изобретению расстояние между нитеподдерживающим элементом и дужкой защиты от перебега независимо от данного диаметра остается неизменным, так что с помощью дужки защиты от перебега в форме дуги окружности, радиус которой согласован с суммой путей нити от нитеподдерживающего элемента к дужке, может быть достигнута совершенная компенсация пути нити между краем и серединой бобины для любых диаметров бобины.
В одном предпочтительном варианте выполнения бобиномотального устройства согласно изобретению нитеприжимные, нитеподдерживающие и, при необходимости, также нитенаправляющие элементы установлены с возможностью поворота вокруг общей оси поворота, проходящей параллельно оси вращения бобины. В механически очень стабильном и компактном варианте выполнения нитеприжимные, нитеподдерживающие и, при необходимости, также нитенаправляющие элементы интегрированы в направляющий аппарат, установленный с возможностью поворота вокруг названной оси поворота
Высокая конструктивная надежность бобиномотального устройства достигается тогда, когда нитеподдерживающие элементы выполнены в виде ролика или ушка. В одном очень стабильном варианте осуществления изобретения нитенаправляющий элемент выполнен в виде дужки защиты от перебега.
В одном предпочтительном варианте выполнения бобиномотального устройства согласно изобретению вверх по ходу от нитеподдерживающего элемента установлен датчик натяжения нити. Иначе, чем у устройств в соответствии с уровнем техники, этот датчик натяжения нити не подвержен, однако, никаким обусловленным разными диаметрами бобин быстрым колебаниям натяжения нити, так что его выходной сигнал с высокой надежностью может быть привлечен к регулированию натяжения нити.
В первом, механически простом варианте выполнения датчик натяжения нити установлен неподвижно. Будучи обусловлено конструкцией в этом варианте выполнения угол обвива нитью датчика натяжения нити изменился бы, что объясняется изменением положения нитеподдерживающего элемента при увеличении диаметра бобины. Для устранения этого возможного недостатка в одном варианте осуществления изобретения между нитеподдерживающим элементом и датчиком натяжения нити может быть установлен неподвижный нитенаправляющий элемент.
В одном альтернативном варианте выполнения датчик натяжения нити сообща с нитеподдерживающими элементами установлен подвижно, так что расстояние между ними остается постоянным. В этом варианте выполнения названной проблемы изменения угла обвива нитью датчика натяжения нити не возникает.
В одном предпочтительном варианте осуществления изобретения датчик натяжения нити содержит кронштейн с тензометром, причем кронштейн несет нитенаправляющий элемент, который предпочтительно вызывает обвив нити или ленточки на 150-180°.
Благодаря мерам согласно изобретению по предотвращению изменений длины пути нити при намотке на бобину и обусловленному этим предотвращению высокочастотных колебаний натяжения нити стало возможным использовать выходные сигналы датчика натяжения нити для регулирования двигателя бобины.
Для этого представляющие натяжение нити выходные сигналы датчика натяжения нити подают к регулятору, предпочтительно ПИД-регулятору, в качестве входных сигналов, который управляет скоростью вращения приводного двигателя бобины в зависимости от входных сигналов и опорного сигнала. С помощью электронного регулирования существенно повышается качество бобин. Приводной двигатель вращает предпочтительно держатель сердечника бобины или нитеприжимной элемент.
Изобретение более подробно поясняется с помощью не ограничивающих его вариантов осуществления со ссылкой на чертежи, на которых изображают:
- фиг.1: принципиальную схему известного бобиномотального устройства;
- фиг.2: нитенаправляюще-нитеприжимной механизм известного бобиномотального устройства;
- фиг.3: влияние неправильного натяжения нити при изготовлении бобины;
- фиг.4А, 4В: схематично первый вариант выполнения бобиномотального устройства согласно изобретению при различных диаметрах бобин;
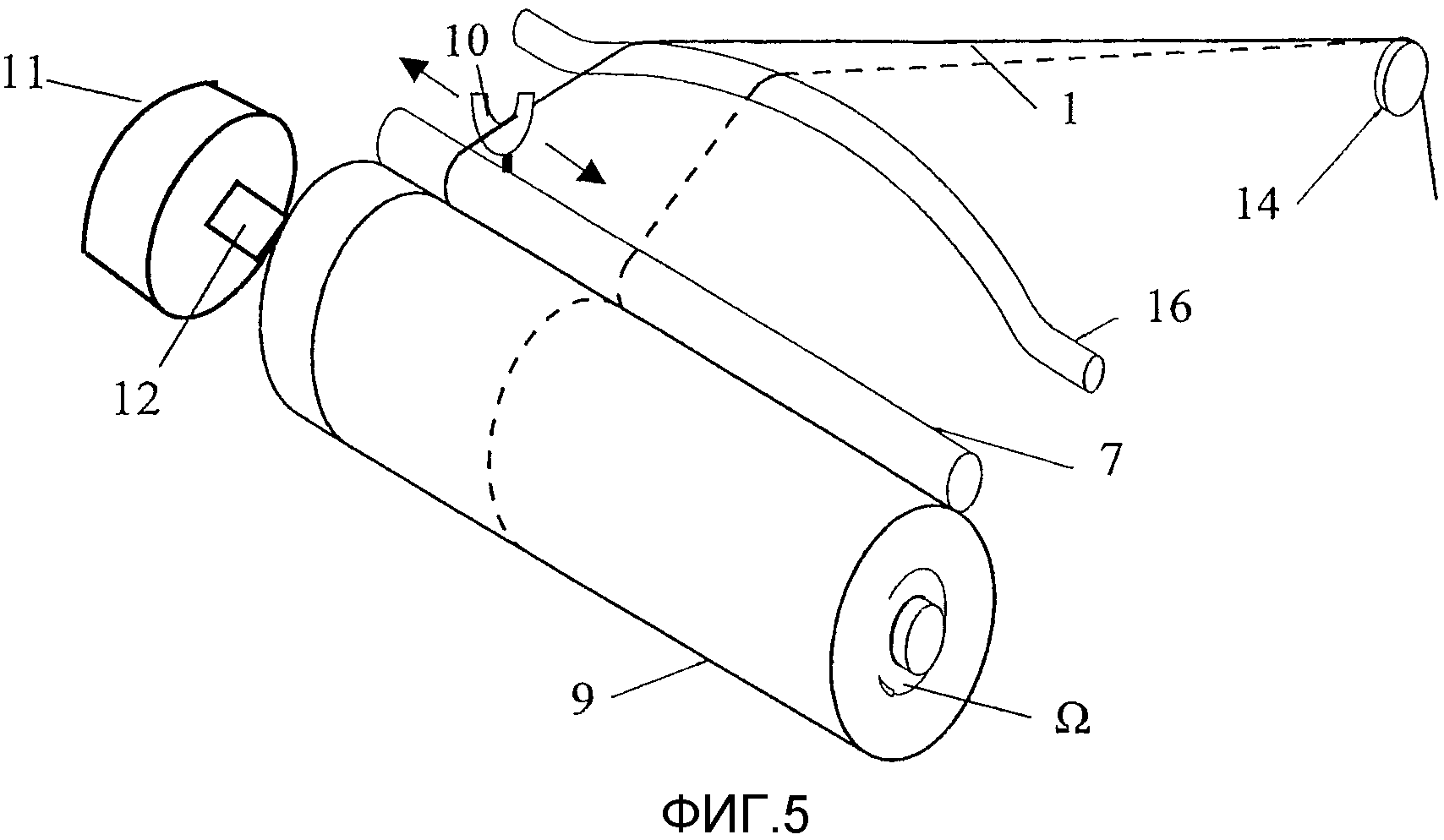
- фиг.5: средство компенсации пути нити в качестве части бобиномотального устройства согласно изобретению;
- фиг.6: действие средства компенсации пути нити по фиг.5 по сравнению с прямой дужкой защиты от перебега;
- фиг.7: блок-схему электронного регулятора двигателя в бобиномотальном устройстве согласно изобретению;
- фиг.8: регулятор натяжения нити бобиномотального устройства согласно изобретению, вид в перспективе;
- фиг.9: геометрические взаимосвязи бобиномотального устройства по фиг.4В;
- фиг.10: геометрическую корректировку угла направляющих роликов бобиномотального устройства;
- фиг.11: диаграмму натяжения нити в зависимости от диаметра бобины;
- фиг.12: геометрические взаимосвязи другого варианта выполнения бобиномотального устройства;
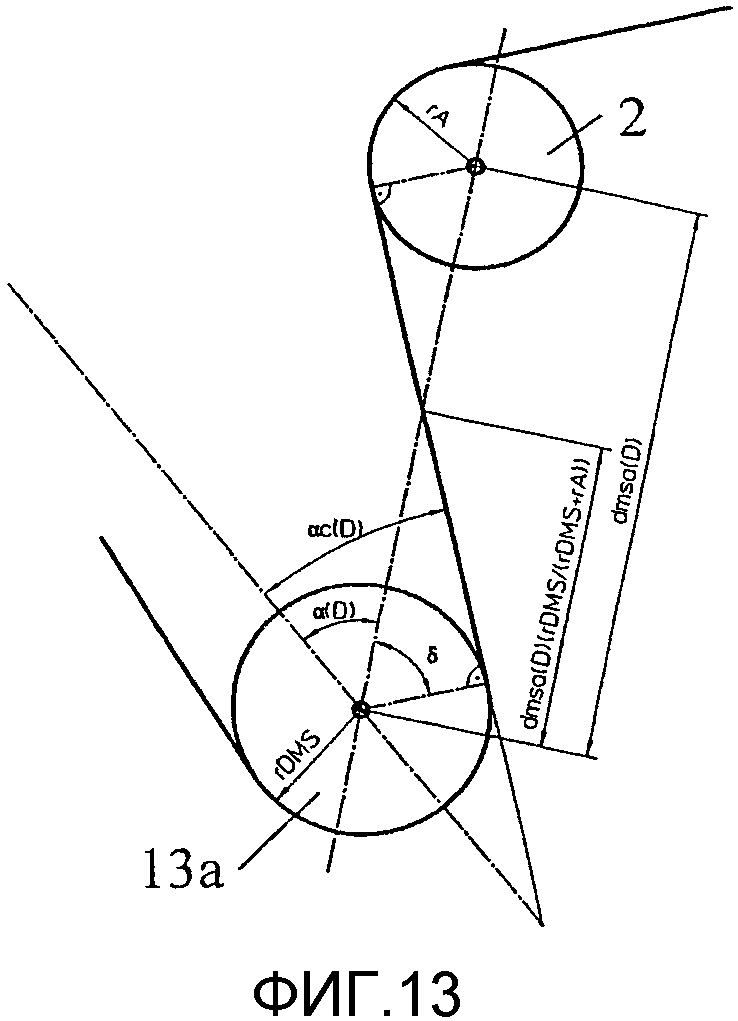
- фиг.13: геометрическую корректировку угла направляющих роликов бобиномотального устройства из фиг.12;
- фиг.14: диаграмму натяжения нити в зависимости от диаметра бобины по варианту выполнения по фиг.12;
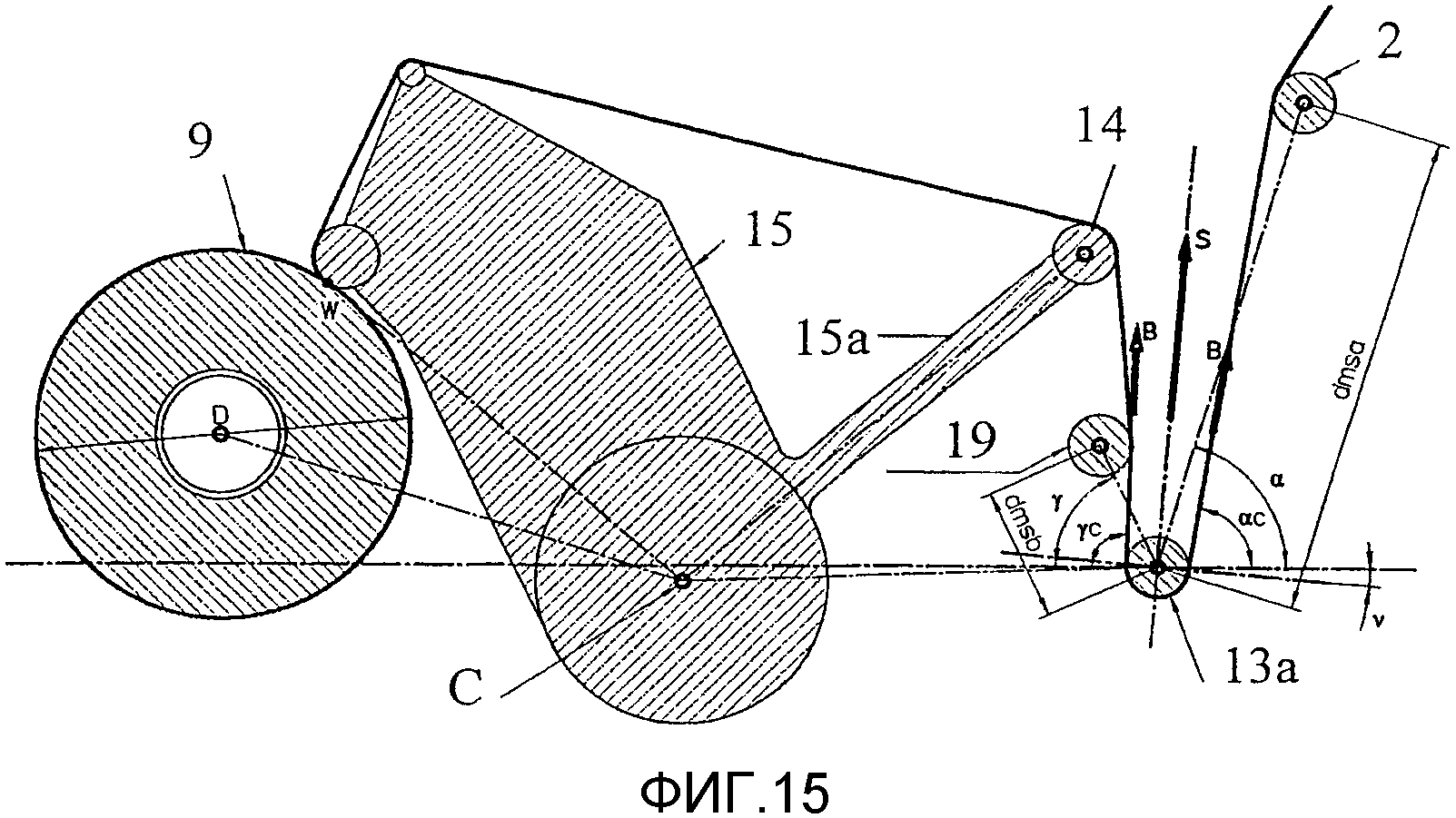
- фиг.15: геометрические взаимосвязи другого варианта выполнения бобиномотального устройства;
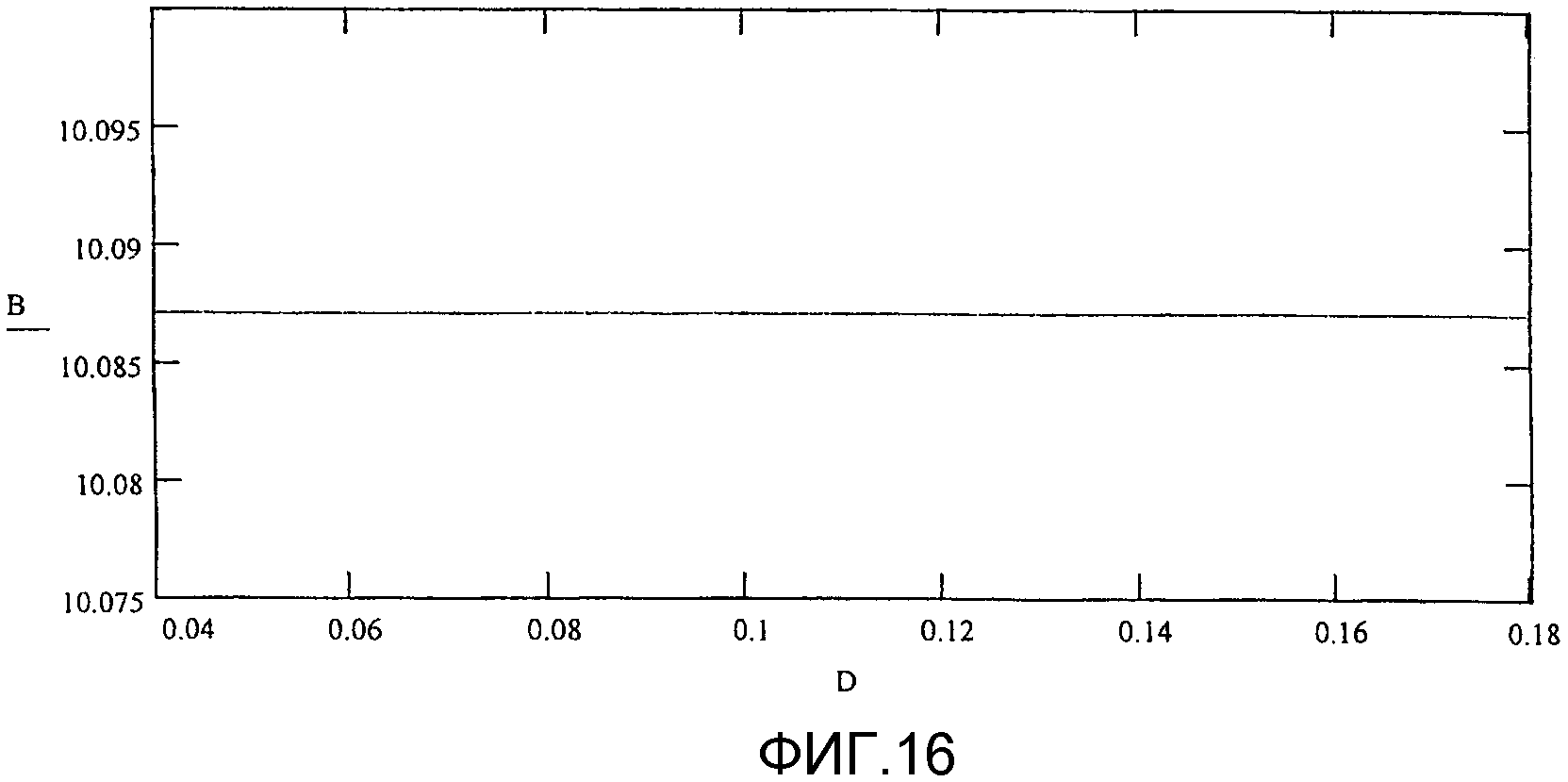
- фиг.16: диаграмму натяжения нити в зависимости от диаметра бобины по варианту выполнения по фиг.15.
На фиг. 4А схематично изображен первый вариант выполнения бобиномотального устройства согласно изобретению, представляющего собой усовершенствование известного бобиномотального устройства по фиг.1. Нить 1 или ленточка попадает непосредственно после своей выработки к первому направляющему ролику 2 бобиномотального устройства. Оттуда нить 1 движется дальше к датчику 13 натяжения нити, снабженному направляющим роликом. Один вариант выполнения этого датчика 13 натяжения нити подробно описан ниже. От датчика 13 натяжения нить 1 движется далее к нитеподдерживающему элементу 14, который может быть выполнен в виде направляющего ролика, закрепленного с возможностью вращения на кронштейне 15а направляющего аппарата 15. Направляющий аппарат 15 включает в себя далее направляющие элементы 6, которые, как в этом примере, могут быть выполнены в виде прямой дужки защиты от перебега, а также прижимной валик 7, который прижимает нить 1 в начале процесса намотки бобины сначала к периферийной поверхности сердечника 8 бобины, а затем во время образования бобины 9 из подаваемой нити - к периферии образующейся бобины 9. Сердечник 8 установлен с возможностью вращения вокруг оси А вращения. На направляющем аппарате 15 между направляющими элементами 6 и прижимным валиком 7 установлен нитеводитель 10, который движет нить возвратно-поступательно аксиально по бобине, обеспечивая, таким образом, равномерное образование бобины по заданной намоточной схеме. Для поддержания равномерного усилия прижима прижимного валика 7 к бобине 9 при увеличении ее диаметра D направляющий аппарат 15 установлен с возможностью поворота вокруг оси С поворота и компенсации, таким образом, увеличивающегося диаметра бобины. Стрелка ρ (D) обозначает угол поворота направляющего аппарата 15 в зависимости от диаметра D бобины.
Благодаря мере согласно изобретению по интегрированию нитеподдерживающего элемента 14 посредством кронштейна 15а в направляющий аппарат 15 в противоположность бобиномотальному устройству в соответствии с уровнем техники расстояние х между нитеподдерживающим элементом 14 и направляющим элементом 6, а также расстояние z между нитеподдерживающим элементом 14 и нитеприжимным элементом 7 остается постоянным независимо от мгновенного диаметра D бобины 9 и мгновенного угла ρ (D) поворота направляющего аппарата 15. Это лучше всего видно в сравнении фиг.4А, где бобина 9 имеет еще небольшой диаметр D, с фиг.4В, где бобиномотальное устройство изображено на более поздней стадии процесса намотки бобины, на которой диаметр бобины уже значительно увеличился, а направляющий аппарат тем самым повернулся на больший угол ρ (D). Как видно, независимо от угла поворота направляющего аппарата образованный нитеподдерживающим 14, направляющим 6 и нитеприжимным 7 элементами треугольник со сторонами x-y-z остается постоянным. Таким образом, было успешно исключено влияние изменяющегося диаметра бобины на натяжение нити.
Вариант выполнения бобиномотального устройства согласно изобретению по фиг.4А, 4В с выполненным в виде прямой дужки защиты от перебега нитенаправляющим элементом 6 имеет, однако, по-прежнему описанную с помощью фиг.2 зависимость длины пути нити от положения нити в середине или на краю бобины. Для уменьшения этого влияния требуется большое расстояние х между нитеподдерживающим 14 и нитенаправляющим 6 элементами и большое расстояние z между нитеподдерживающим 14 и нитеприжимным 7 элементами.
Возможность полной компенсации разных длин пути нити на краю и в середине бобины показана в перспективе на фиг.5 и основана на выполнении нитенаправляющего элемента в качестве средства компенсации пути нити в виде криволинейной дужки 16 защиты от перебега, причем радиус кривизны дужки защиты от перебега соответствует длине L нити 1 между нитеподдерживающим элементом 14 и дужкой 16 защиты от перебега. Если бы у варианта выполнения на фиг.4А, 4В вместо прямой дужки 6 защиты от перебега была установлена криволинейная, то сумма расстояний х и у в каждой точке отклонения нити по отношению к оси бобины была бы постоянной, тогда как расстояние у до краев бобины было бы меньше. Действие этой компенсации длины нити показано на фиг.6 в сравнении между прямой 6 и криволинейной 16 дужками защиты от перебега. Видно, что у прямой дужки 6 путь нити в середине бобины выступает на отрезок L1 за дужку. Это приводит к ослаблению натяжения нити каждый раз, когда нить находится в середине бобины. Хотя выполнение нитенаправляющего элемента в виде криволинейной дужки 16 защиты от перебега само по себе известно, эта мера проявляет свое полное действие только благодаря настоящему изобретению, согласно которому расстояние между нитеподдерживающим элементом 14 и дужкой 16 защиты от перебега остается постоянным независимо от диаметра бобины. В соответствии с уровнем техники до сих пор можно было только оптимизировать радиус кривизны дужки защиты от перебега для одного диаметра бобины, так что при любом отклонении диаметра бобины возникали различия длин пути нити между краем и серединой бобины.
Возвращаясь к фиг.5, можно видеть, что на ней схематично изображен двигатель 11, который приводит во вращение держатель 12 сердечника бобины в виде веретена и за счет этого вращает бобину 9 с угловой скоростью Ω.
Как уже сказано, для качества намотки бобины решающим является натяжение нити 1 во время намотки на бобину 9. При ослаблении натяжения нити следует повысить частоту вращения двигателя, чтобы восстановить желаемое натяжение, а при возрастании натяжения частоту вращения двигателя следует уменьшить. Поскольку благодаря изобретению колебания высокой частоты натяжения нити при возвратно-поступательном движении нитеводителя 10 в значительной степени или полностью устранены, впервые можно, таким образом, использовать для регулирования частоты вращения двигателя электронную регулирующую схему, не склонную к колебаниям. Желаемое натяжение нити может быть настроено благодаря электронному регулированию существенно точнее, чем в соответствии с уровнем техники, где это реализовано механически за счет натяжения нити на компенсирующем валике. Электронный регулирующий контур показан в виде блок-схемы на фиг.7. При этом двигатель 11 вращает через держатель 12 сердечника бобину 9 и создает тем самым в намотанной на нее нити 1 определенное натяжение, которое регистрируется датчиком 13 натяжения нити и подается в виде электрического сигнала TS к регулирующей схеме 17. Регулирующая схема 17 может быть выполнена предпочтительно в виде ПИ- или ПИД-регулятора. Когда регулирующая схема 17 определит, что мгновенное натяжение нити отличается от заданного значения Ref, то она вырабатывает (или изменяет) выходной сигнал OS, который воздействует на возбудитель 18 двигателя для изменения частоты вращения двигателя 11, с тем чтобы довести натяжение нити до заданного значения. Возбудитель 18 двигателя может быть выполнен в зависимости от выполнения двигателя 11, например, в виде статического преобразователя частоты.
На фиг.8 подробно изображен вариант выполнения датчика 13 натяжения нити. Датчик 13 натяжения нити содержит направляющий ролик 13а, установленный на свободном конце консоли (кронштейна) 13b. Другой конец консоли прочно закреплен на опоре 19. Примерно на половине длины консоли 13b размещен тензометр (DMS) 13с, который постоянно измеряет натяжение нити 1, движущейся вокруг ролика 13а. Точнее говоря, тензометр 13с измеряет вызванное натяжением нити растяжение или сжатие консоли 13b. Выработанный тензометром измерительный сигнал привлекается впоследствии для регулирования частоты вращения, как это пояснялось выше. Растягивающее усилие нити 1, действующее на направляющий ролик 13а, зависит от угла поступающего и сходящего конца нити к направлению измерения тензометра. В зависимости от конструктивного выполнения углы изменяются с диаметром бобины или остаются постоянными. Ниже с помощью чертежей описаны некоторые варианты, причем геометрическая взаимосвязь между изменяющимся диаметром D бобины и усилием B(D) нити при заданном усилии S изображена аналитически. S - это сумма действующих на тензометр составляющих усилий B(D) нити, которая является здесь постоянной.
Прежде всего с помощью фиг.9 следует пояснить геометрию бобиномотального устройства по фиг.4В, имеющего жестко закрепленный направляющий ролик 13а датчика натяжения нити, а также изменяемый угол между направляющим роликом 13а и нитеподдерживающим элементом 14. При этом варианте угол α остается постоянным. Насколько большой является постоянная доля поступающего конца нити, зависит от угла α и от направления измерения натяжения нити. Доля сходящей доли связана с диаметром бобины. Эта зависимость подробно описана ниже. Из фиг.9 видно, что углы α и γ приходится корректировать из-за радиуса направляющих роликов, чтобы получить направление усилия ленточек. Необходимая корректировка углов направляющих роликов показана на фиг. 10.
Следующие величины возникают за счет простых угловых отношений из конструктивно данных параметров положения:
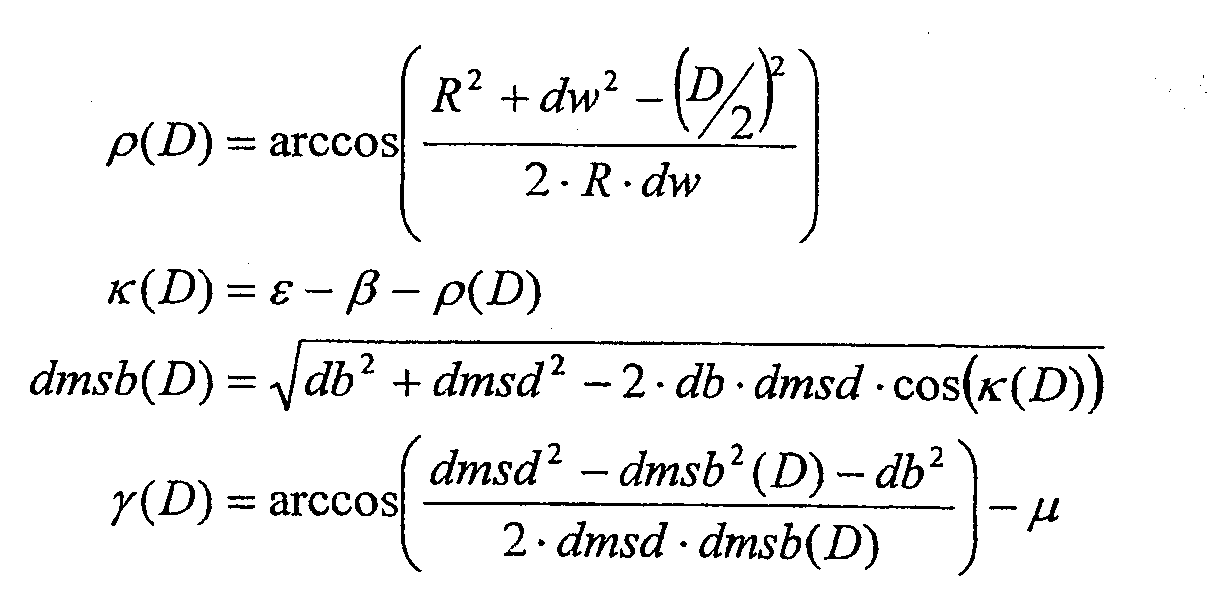
С учетом диаметра ролика угол γс(D) составляет (фиг.10):
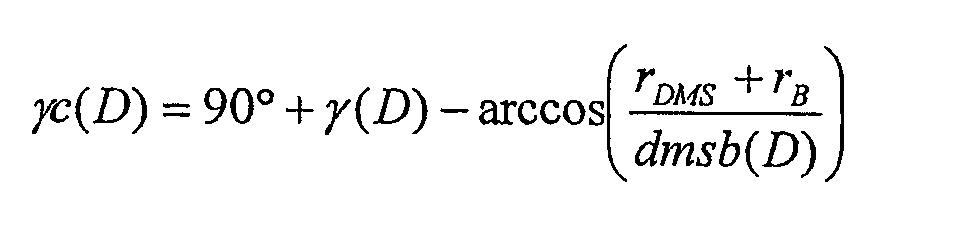
Аналогично γс(D) αс составляет:

Если с вычисленными выше углами сложить или вычесть из них наклонное положение направления ν усилия тензометра DMS, то можно вычислить усилие B(D) нити из заданного усилия S:
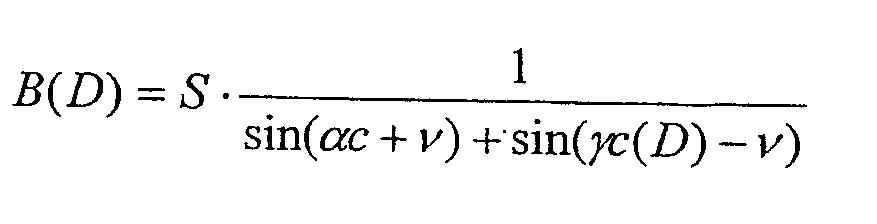
На фиг.11 в качестве примера изображена характеристика усилия B(D) нити в ньютонах [N] в зависимости от диаметра D бобины в метрах [м]. Угол ν был выбран так, что направление усилия DMS является симметралью угла между усилием нити относительно ролика 2 и симметралью угла конечных положений при D=40 мм и D=180 мм нитеподдерживающего элемента 14. При этом следует обратить внимание на то, что симметраль угла нити относительно нитеподдерживающего элемента 14 достигается не при среднем диаметре бобины D=90 мм, а только при большем диаметре D. Главный фактор асимметрии максимального усилия имеет, однако, иную причину. Усилие относительно ролика 2 постоянное, наибольший вклад усилия нити в нитеподдерживающий элемент 14 получают тогда, когда нить лежит параллельно направлению усилия DMS, а не тогда, когда направление усилия DMS лежит в симметрали угла обоих усилий нити.
На фиг.12 изображен вариант выполнения бобиномотального устройства согласно изобретению, имеющего поворотный вместе с направляющим аппаратом 15 направляющий ролик 13а датчика натяжения нити, а также изменяемый угол между этим направляющим роликом 13а и неподвижным направляющим роликом 2. Направляющий ролик 13а датчика натяжения нити соединен посредством кронштейна 15b с направляющим аппаратом 15. За счет этого изменяется также направление измерения DMS. Таким образом, у этого варианта угол α зависит от диаметра бобины. У этого варианта угол нити относительно нитеподдерживающего элемента 14 и направления усилия DMS постоянный. Вместо этого изменяется угол DMS относительно ролика 2. Этот изменяющийся угол зависит в противоположность прежнему варианту не только от диаметра D бобины, но и от высоты положения бобиномотального устройства. Также здесь углы α и γ следует скорректировать, как показано на фиг.13.
Таким образом, следующие величины возникают за счет простых угловых отношений из конструктивно данных параметров положения:

С учетом диаметров роликов угол γс составляет (фиг.10):

Из фиг.13 αс(D) составляет:

Если с вычисленным выше углом γс сложить наклонное положение направления ν усилия DMS, то можно вычислить усилие B(D) нити из заданного усилия S:
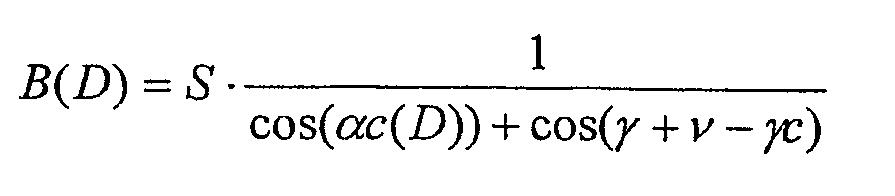
На фиг.14 в качестве примера изображена характеристика усилия B(D) нити в ньютонах [N] в зависимости от диаметра D бобины в метрах [м].
У другого, изображенного на фиг.15 варианта бобиномотального устройства согласно изобретению направляющий ролик 13а датчика натяжения нити установлен неподвижно. За счет дополнительного направляющего ролика 19 достигается постоянное результирующее направление усилия на направляющем ролике 13а датчика натяжения нити. В этом варианте направления усилий нити остаются постоянными. Они, таким образом, не зависят от диаметра D бобины. Оба угла α и

Аналогично γс αс составляет:

Если с вычисленными выше углами сложить или вычесть из них наклонное положение направления ν усилия DMS, то можно вычислить усилие B нити из заданного усилия S:

На фиг.16 в качестве примера изображена характеристика усилия B нити в ньютонах [N]. Видно, что она совершенно не зависит от диаметра бобины.
Реферат
Бобиномотальное устройство для получения бобины посредством намотки нити или ленточки на сердечник бобины включает держатель для удержания и вращения сердечника бобины вокруг оси вращения и нитеприжимные элементы для прижатия нити или ленточки к периферийной поверхности, образующейся на сердечнике бобины. Нитеприжимные элементы установлены, по существу, радиально подвижными по отношению к оси вращения, расположенной вблизи нитеприжимных элементов. Предусмотрены нитеводитель для возвратно-поступательного движения нити или ленточки вдоль оси вращения и нитеподдерживающие элементы, выполненные с возможностью ведения подаваемой к бобине или сердечнику бобины нити аксиально фиксированно по отношению к оси вращения. Нитеприжимные элементы сообща с нитеподдерживающими элементами установлены, по существу, радиально подвижными по отношению к оси вращения, так что расстояние между нитеприжимными элементами и нитеподдерживающими элементами остается постоянным. Устройство обеспечивает поддержание стабильного натяжения нити при наматывании бобины и хорошее качество намотки нити. 11 з.п. ф-лы, 16 ил.

Комментарии