Цилиндр фальцевального аппарата с корпусом и, по меньшей мере, одним захватом - RU2340539C2
Код документа: RU2340539C2
Чертежи



Описание
Настоящее изобретение относится к цилиндру фальцевального аппарата с корпусом и по меньшей мере одним захватом согласно ограничительной части п.1 или 2 формулы изобретения.
Такой снабженный захватами цилиндр несет на своей боковой поверхности один или несколько захватов, способных перемещаться между положением, в котором они прижимают к боковой поверхности и удерживают в таком прижатом состоянии направляющий конец куска плоского материала, транспортируемого на этом цилиндре, и положением отпускания, в котором плоский материал может снова освободиться от цилиндра, соответственно в котором может быть принят и зажат новый кусок плоского материала. В общем, захваты выполняют качательное движение между этими двумя положениями. Так как периоды времени, имеющиеся в распоряжении для зажимания, соответственно отпускания продукта, малы, то качательное движение должно происходить с высокой скоростью, и амплитуда движения между зажимным положением и отпускающим положением захвата должна быть насколько возможно малой, чтобы удерживать в заданных пределах ускорения, которые приводят к износу материала.
Чтобы предотвратить повреждение удерживаемого захватом на цилиндре заднего конца куска плоского материала в результате движения захвата, следующего за этим куском в окружном направлении цилиндра, при зажиме заднего куска плоского материала, большинство снабженных захватами цилиндров спроектировано так, что они принимают куски плоского материала, подаваемые на такой цилиндр с интервалом между ними, так что куски плоского материала прилегают к цилиндру с образованием промежутка между следующими друг за другом кусками, и захват может перемещаться в промежутке, не касаясь предшествующего куска. Если эти куски плоского материала до этого были получены отрезанием от непрерывного полотна, то отрезанные куски, чтобы достичь такого промежутка, должны быть ускорены до скорости, которая превышает скорость полотна перед отрезанием. Но если транспортная система, которая после отрезания продолжает перемещать отрезанные от полотна продукты, работает с более высокой скоростью, чем скорость подаваемого полотна, то это приводит к проскальзыванию и тем самым к трению между транспортной системой и поступающим в нее передним участком полотна, который перед отрезанием вынужденно перемещается еще с первоначальной скоростью полотна. У плоского материала с чувствительной поверхностью, например у свежей печатной продукции, это трение может ухудшать качество поверхности, например, из-за следов скольжения на запечатанном материале или смазывания краски. Если же куски плоского материала составляются из стопы не связанных между собой листов, то дополнительно появляется проблема, которая заключается в том, что различное трение на разных страницах стопы может приводить к тому, что листы смещаются относительно друг друга и стопа разрыхляется, что значительно затрудняет дальнейшую обработку стопы.
Особенно проблематично, если куски плоского материала отрезаются от полотна непосредственно в контакте со снабженным захватами цилиндром, например с помощью вращающегося ножевого барабана, который вместе со снабженным захватами цилиндром ограничивает резальный зазор и, взаимодействуя с контропорой снабженного захватами цилиндра, разрезает полотно. Чтобы подлежащее разрезанию полотно прилегало равномерно к поверхности снабженного захватами цилиндра, захваты должны быть в состоянии погружаться внутрь этого цилиндра. После того как кусок плоского материала отрезан от подведенного полотна, в распоряжении остается лишь немного времени, чтобы захватить захватом вновь появившуюся переднюю кромку полотна и прижать ее к поверхности цилиндра. Однако путь между погруженным положением захвата и выдвинутым положением, в котором плоский материал прижимается к цилиндру, является длинным и требует высокой скорости движения захвата, которая может быть реализована лишь с помощью высококачественной дорогостоящей приводной механики. Кроме того, износ и тем самым повреждаемость приводных механических устройств тем выше, чем выше скорость работы.
Из заявки на Европейский патент ЕР 0931748 В1 и заявки на патент Германии DE 19857507 А1 известен снабженный захватами цилиндр, способный перемещать отрезанные от подводимого полотна печатные продукты без опережения, т.е. без промежутка между следующими один за другим печатными продуктами. Захват у этого цилиндра смонтирован на установленном в цилиндре с возможностью качания валу через механизм поступательного движения, который в соответствии качательным движением побуждает захват к параллельному перемещению. Этот механизм поступательного движения служит для того, чтобы перемещать захват между его погруженным положением и выступающим над боковой поверхностью цилиндра положением, из которого он может быть повернут вокруг вала, чтобы прижать переднюю кромку полотна печатных продуктов к поверхности цилиндра.
В заявках на патенты Германии DE 10060713 А1, США US 6093139 А и США US 953063 А описывается снабженный захватами цилиндр, имеющий марзан для ножа взаимодействующего с цилиндром ножевого барабана. Захваты цилиндра выполнены с возможностью качаний вокруг первой подвижной оси для зажимания подлежащего транспортировке материала. Эта первая ось в свою очередь установлена на рычаге, выполненном с возможностью качаний вокруг стационарной относительно цилиндра второй оси. Этот рычаг управляется посредством первого дискового кулачка, чтобы приводить захват в движение в окружном направлении. Второй дисковый кулачок управляет зажимным движением захвата.
В DE 10203059 А1 раскрывается транспортирующий цилиндр для листов запечатываемого материала с захватом. Захват выполнен с возможностью перемещения посредством двух стационарных относительно цилиндра осей качаний и еще одной оси, установленной с возможностью качаний вокруг одной из двух стационарных относительно цилиндра осей качаний. Для управления предусмотрен только один дисковый кулачок.
В US 5429578 А и US 5004451 А описаны фальцевально-ножевые цилиндры, которые для проводки продуктов взаимодействуют с конвейерными лентами. В основу изобретения положена задача создать цилиндр фальцевального аппарата с корпусом и по меньшей мере одним захватом, двухступенчатое движение которого происходит с небольшой нагрузкой механических компонентов и высокой точностью.
Эта задача решается согласно изобретению с помощью признаков отличительной части п.1 или 2 формулы изобретения.
Как и снабженный захватами цилиндр, известный из ЕР 0931748 В1, цилиндр по изобретению используют для сокращения движения между погруженным положением и зажимным положением захвата, в дополнение к качательному движению, поступательное движение, однако с тем отличием, что приводной механизм поступательного движения не совершает качательных движений вместе с захватом вокруг оси качаний последнего и таким образом не повышает момент инерции захвата, при этом ось захвата как таковая смещается в радиальном направлении. Так как радиальный ход, необходимый для зажимания или отпускания плоского материала на снабженном захватами цилиндре, является небольшим в сравнении с необходимой амплитудой движения захвата в окружном направлении, то для этого достаточно небольшой амплитуды движения радиального перемещения, которое может быть реализовано с незначительной затратой энергии и незначительной нагрузкой механических компонентов.
Если подлежащий зажиманию захватом плоский материал представляет собой стопу листов, то в момент зажимания стопы желательно исключить составляющую движения захвата в окружном направлении цилиндра, с тем чтобы стопа не подвергалась действию срезающих сил. В то время как зажимание обычно осуществляется лишь благодаря качательному движению захвата и тем самым нельзя избежать действия срезающей силы на стопу листов при зажимании, у снабженного захватами цилиндра по изобретению предпочтительно предусмотрено, что в конечной фазе качательного движения в зажимное положение первая ось перемещается радиально внутрь.
Самая простая и надежная возможность создания привода для радиального движения первой оси внутрь состоит в том, что эту ось монтируют на первом плече, способном поворачиваться вокруг стационарно установленной на корпусе цилиндра второй оси, так что радиальное движение первой оси соответствует качательному движению этого первого плеча.
Это качательное движение первого плеча, как и качательное движение самого захвата, может быть весьма просто обеспечено дисковым кулачком, который не вращается вместе со снабженным захватами цилиндром и форма которого ощупывается рычагом, соединенным с первым плечом.
Для приведения захвата в качательное движение между погруженным положением и зажимным положением предусмотрена соединительная тяга, которая шарнирно соединена, с одной стороны, с захватом, а с другой стороны, с установленным с возможностью качания вокруг третьей оси вторым плечом. Качательное движение второго плеча также может быть обеспечено, как указано выше, дисковым кулачком.
В варианте компактного размещения вторая и третья оси находятся на противоположных сторонах захвата относительно окружного направления цилиндра.
Из двух плеч первое ориентировано преимущественно в окружном направлении, а второе - преимущественно в радиальном направлении корпуса цилиндра; другими словами, ориентация первого плеча ближе к окружному направлению, чем ориентация второго плеча, и ориентация второго плеча ближе к радиальному направлению, чем ориентация первого плеча.
На корпусе цилиндра для каждого захвата предусмотрена контропора, которая во взаимодействии с ножом, перемещаемым совместно с захватом, служит для разрезания плоского материала, подаваемого снабженным захватами цилиндром и захватываемого захватом.
Относительно направления вращения такого снабженного захватами цилиндра захват расположен перед предусмотренной для него контропорой, и участок поверхности снабженного захватами цилиндра, к которому захват прижимает разрезанный плоский материал, предпочтительно и является той самой контропорой для него, эластичность которой таким образом и поддерживает как процесс резания, так и захватывание.
Ниже изобретение подробнее поясняется описанием примера его осуществления со ссылкой на прилагаемые чертежи, на которых фигуры показывают:
Фиг.1 схематическое изображение аппарата для поперечной фальцовки, в котором использован снабженный захватами цилиндр;
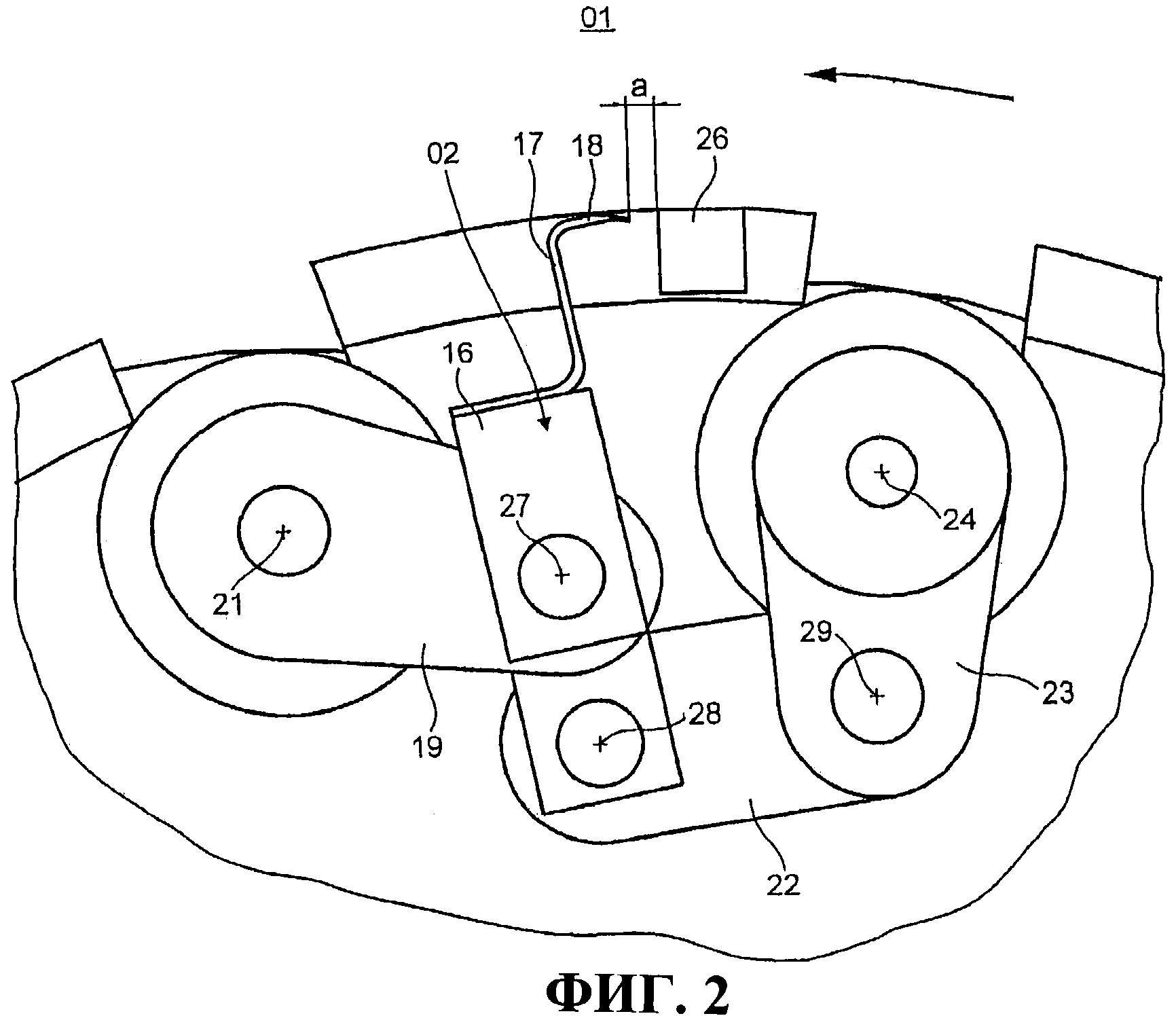
Фиг.2 увеличенный частичный разрез снабженного захватами цилиндра, показывающий захват в его погруженном положении;
Фиг.3 частичный разрез, аналогичный таковому на Фиг.2, показывающий захват во время выдвижения из его погруженного положения;
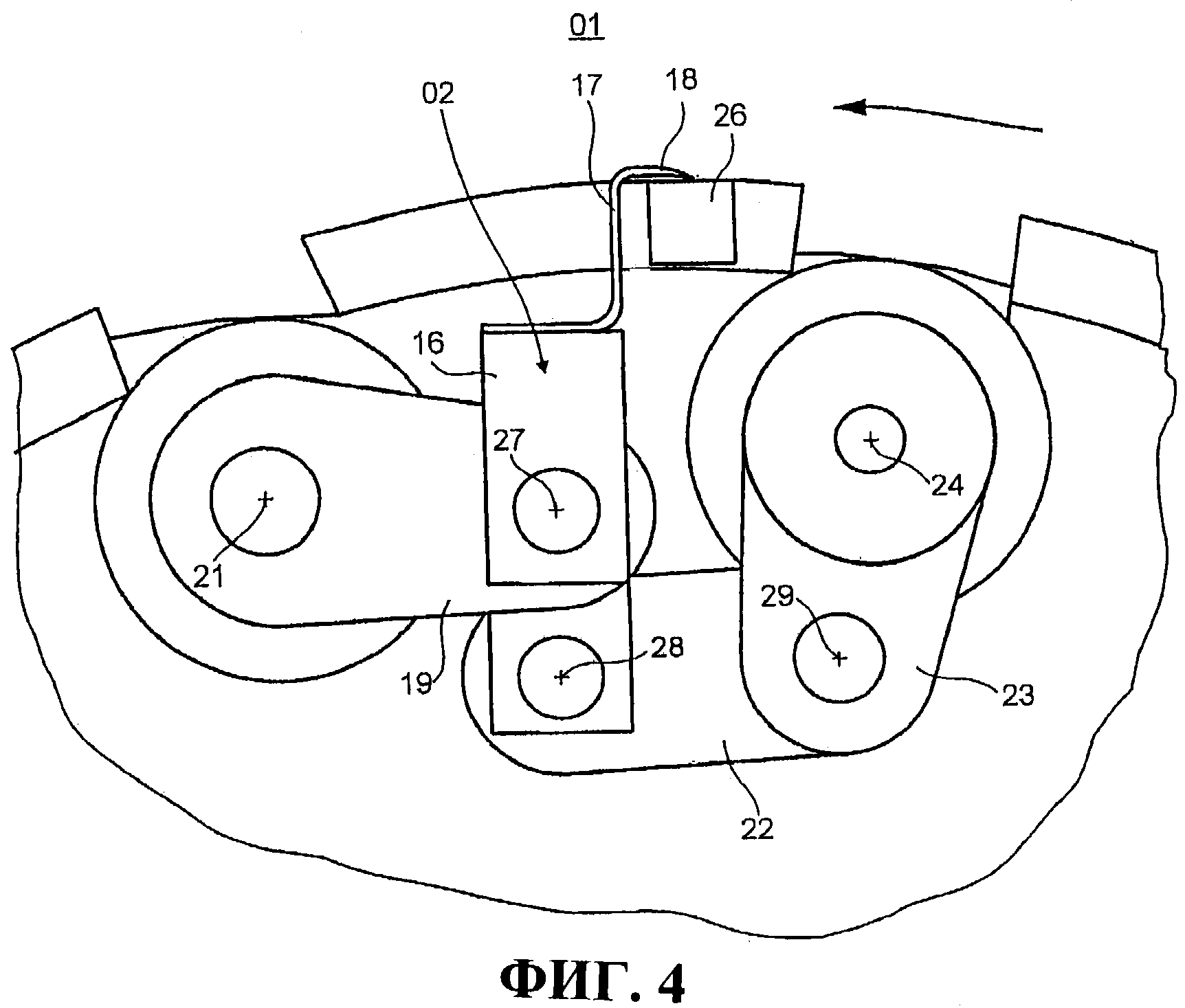
Фиг.4 частичный разрез, показывающий захват в его зажимном положении;
Фиг.5 частичный разрез, показывающий захват на его обратном пути в погруженное положение;
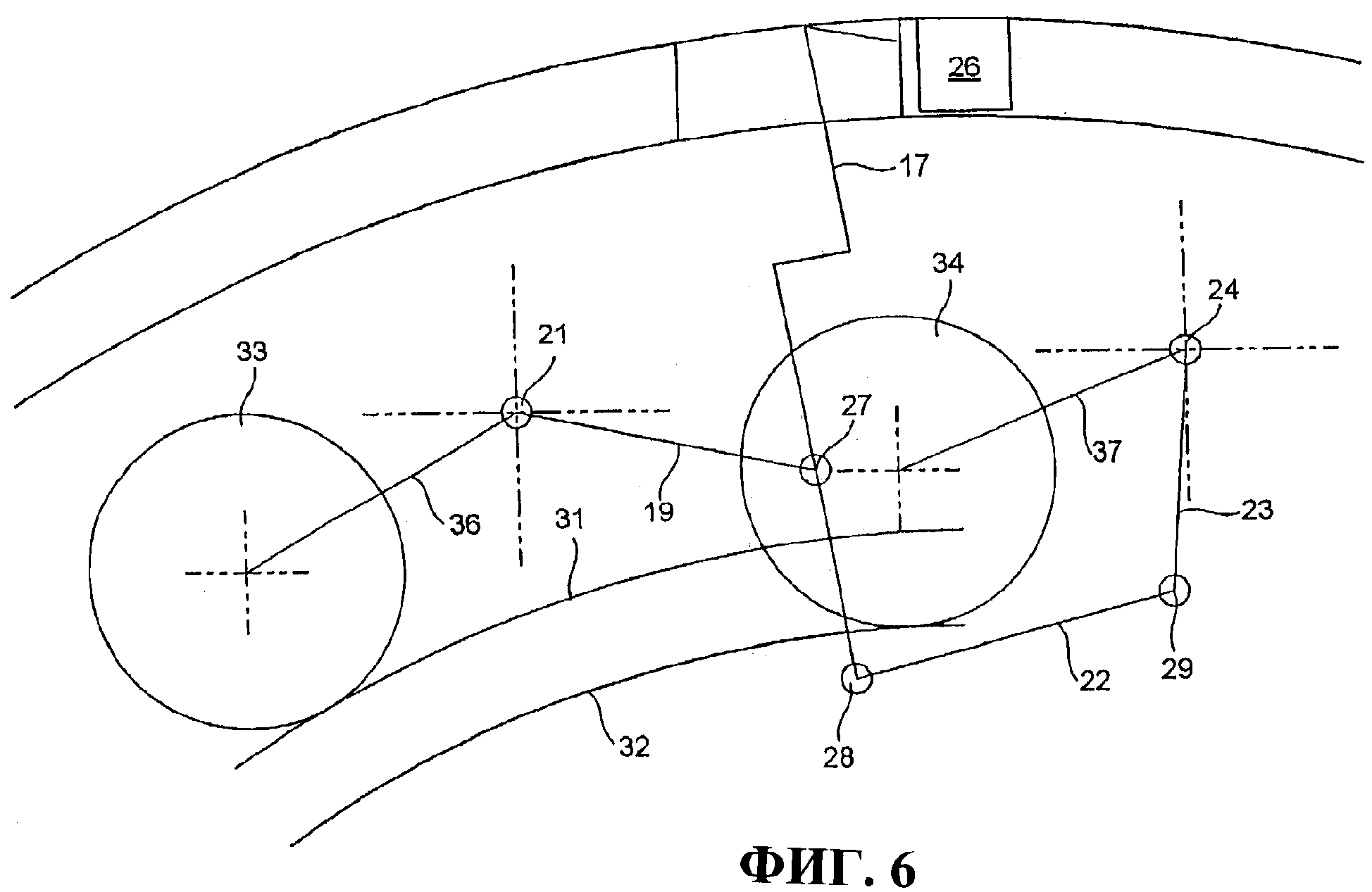
Фиг.6 схематическое изображение, соответствующее Фиг.2;
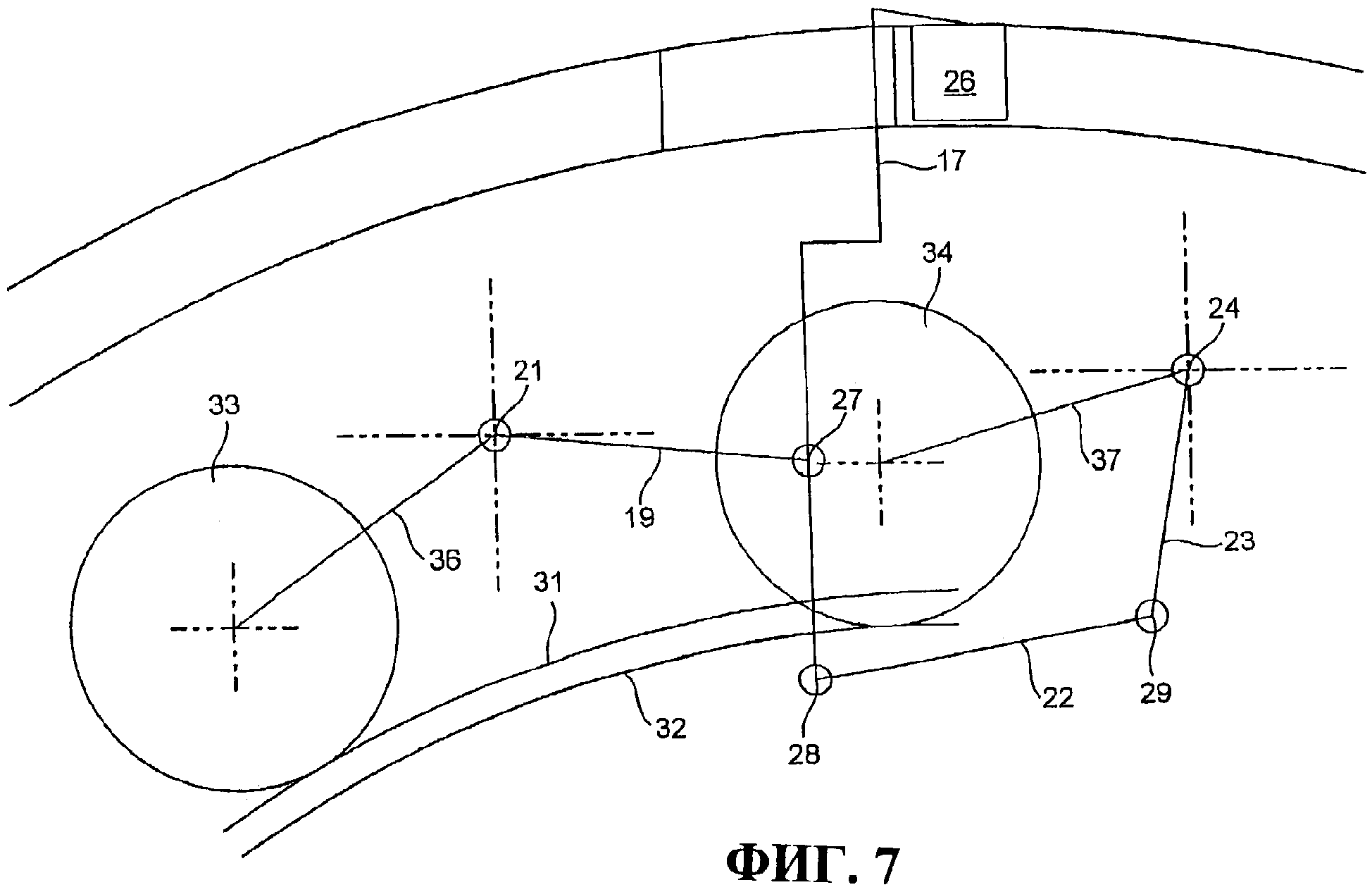
Фиг.7 схематическое изображение, соответствующее Фиг.4;
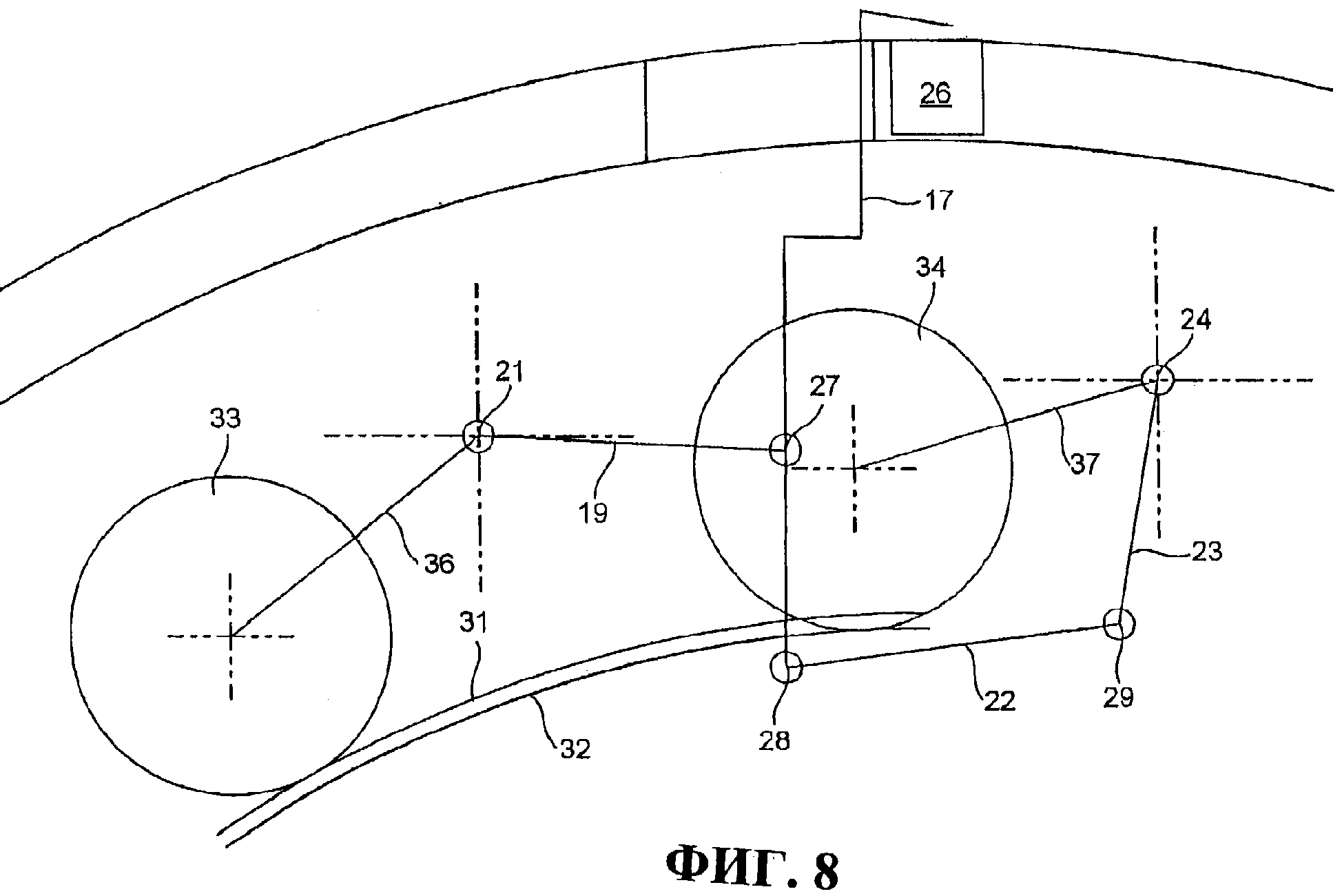
Фиг.8 схематическое изображение, соответствующее Фиг.5;
Фиг.9 схематическое изображение, соответствующее Фиг.1;
Фиг.10 схематический вид сверху на снабженный захватами цилиндр.
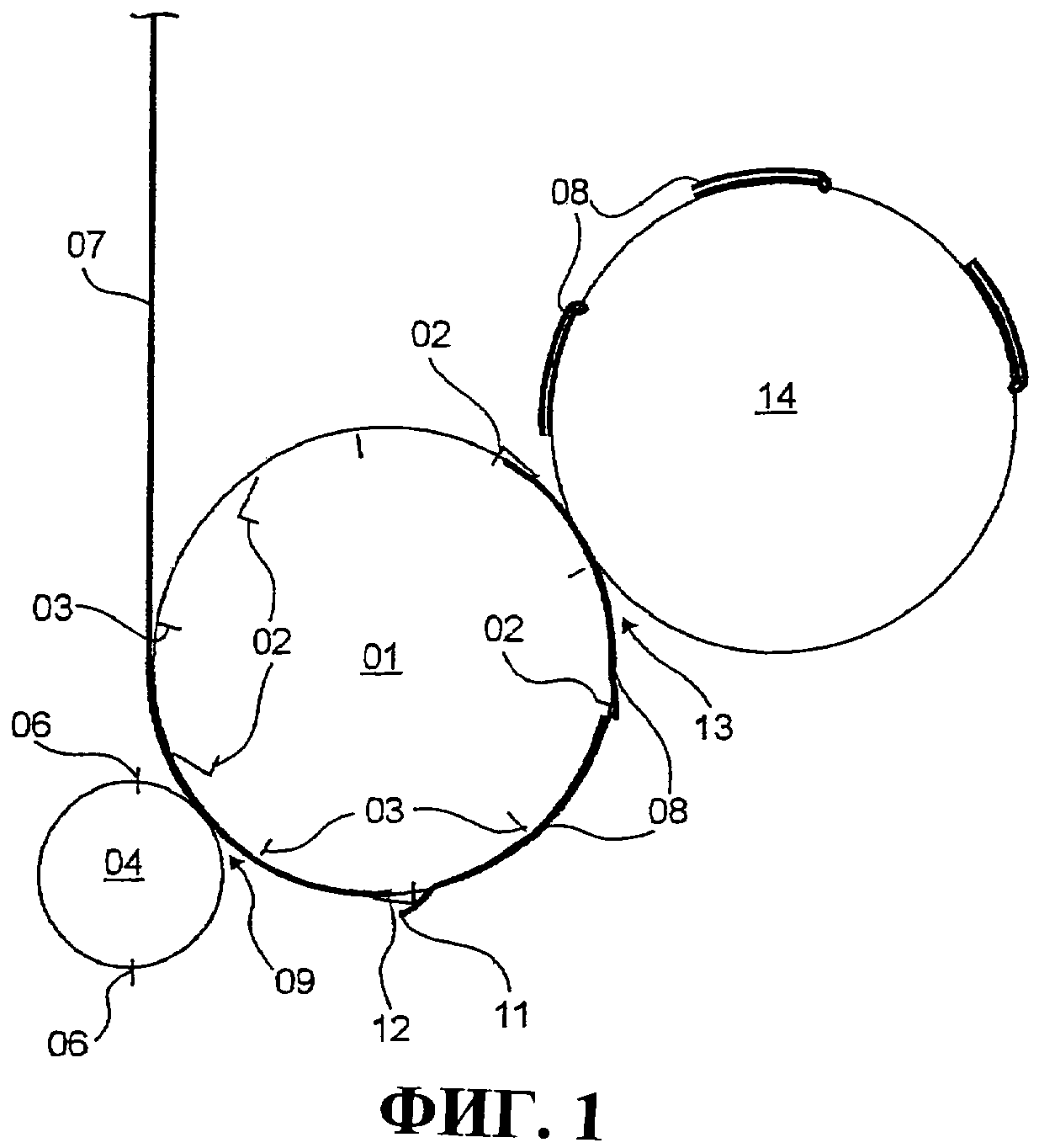
На Фиг.1 показан сильносхематизированный разрез через фальцевальный аппарат, например рулонной ротационной печатной машины, согласно настоящему изобретению. Фальцаппарат включает в себя цилиндр 01, например снабженный захватами цилиндр 01, который в показанном примере оснащен равномерно распределенными в окружном направлении пятью захватами 02 и соответственно пятью фальцевальными ножами 03. В аксиальном направлении цилиндра 01 предпочтительно расположено множество таких, например, индивидуально подпружиненных захватов 02. Снабженный захватами цилиндр 01 образует совместно с ножевым барабаном 04, в данном примере с двумя ножами 06, резальный зазор 09, в котором подаваемый плоский материал 07, например полотно 07, состоящее, как правило, из множества уложенных одно на другое запечатанных полотен материала, например бумажных полотен, разрезается на отдельный плоский материал 08, например на отдельные печатные продукты 08, имеющие длину, соответствующую печатной странице.
Во время прохождения через резальный зазор 09 захваты 02 и фальцевальные ножи 03 утоплены внутрь снабженного захватами цилиндра 01. Окружная скорость снабженного захватами цилиндра 01 точно соответствует скорости подачи полотна 07, так что отрезанные от полотна 07 печатные продукты 08 следуют друг за другом на окружности снабженного захватами цилиндра 01 без промежутков, т.е. между расположенным внизу материальным полотном и рабочей поверхностью снабженного захватами цилиндра 01 относительное движение отсутствует.
Слова «точно» и «отсутствует» следует понимать в техническом смысле, т.е. при определенных обстоятельствах возможно появление пренебрежимо малых, допустимых относительных движений.
После прохождения через резальный зазор 09 захваты 02 под задним участком 11 одного из печатных продуктов 08 выдвигаются из снабженного захватами цилиндра 01 и откидываются против направления вращения цилиндра, чтобы прижать к поверхности снабженного захватами цилиндра 01 соответствующую переднюю кромку 12 полотна 07. Задние участки 11 каждого печатного продукта 08 приподняты таким образом на небольшую высоту над поверхностью снабженного захватами цилиндра 01, однако это не мешает равномерному наматыванию полотна 07 на снабженный захватами цилиндр 01, так как эти участки 11 приподнимаются над поверхностью цилиндра 01 только после отрезания.
Снабженный захватами цилиндр 01 образует с клапанным цилиндром 14 фальцаппарата фальцевальный зазор 13. Во время прохождения через фальцевальный зазор 13 фальцевальные ножи 03 выдвигаются из снабженного захватами цилиндра 01, чтобы ввести печатные продукты 08 вдоль средней линии в (непоказанные) фальцевальные клапана клапанного цилиндра 14. Поперечно сфальцованные таким образом печатные продукты 08 перемещаются на клапанном цилиндре 14 фальцаппарата до того места, где они будут переданы, например, на (непоказанное) лопастное колесо для раскладки на ленточный транспортер.
На Фиг.2 показаны в частичном разрезе, поперечно к оси снабженного захватами цилиндра 01, захват 02 и его окружение. Захват 02 включает в себя несущую балку 16, простирающуюся во всю используемую ширину снабженного захватами цилиндра 01, и несет на стороне, обращенной радиально наружу, двойной L-образный или Z-образный профиль 17 из эластичного материала, например из рессорной стали, каковой профиль может выдвигаться для зажимания печатных продуктов 08. Профиль 17 может простираться в аксиальном направлении цилиндра 01 в виде сплошного элемента или быть разделен на множество расположенных с расстоянием друг от друга в аксиальном направлении зубцов, каждый из которых проступает через отверстие в боковой поверхности снабженного захватами цилиндра 01.
Несущая балка 16 шарнирно соединена, с одной стороны, с первым плечом 19, которое жестко соединено с валом 21, установленным в снабженном захватами цилиндре 01 стационарно относительно цилиндра 01, но с возможностью вращения. Первое плечо 19 простирается приблизительно параллельно боковой поверхности цилиндра 01. С другой стороны, несущая балка 16 шарнирно соединена через изменяющую свое положение относительно снабженного захватами цилиндра 01 ось 28 качаний с соединительной тягой 22, которая также ориентирована приблизительно параллельно боковой поверхности цилиндра 01 и со своей стороны шарнирно соединена через изменяющую свое положение относительно цилиндра 01 ось 29 качаний с приблизительно радиально ориентированным вторым плечом 23. Это второе плечо 23 жестко соединено с валом 24, установленным с возможностью вращения в снабженном захватами цилиндре 01. Вращательное положение двух плеч 19, 23, как показано на Фиг.6, 7 и 8, зафиксировано двумя дисковыми кулачками 31, 32, которые не вращаются совместно со цилиндром 01 и ощупываются соответственно роликами 33, 34, каждый из которых соединен через соответствующее плечо 36; 37 с валом 21, соответственно 24.
Ролики 33, 34 предпочтительно прижаты к дисковым кулачкам 31, 32 пружиной, в частности торсионной пружиной. Дисковые кулачки 31, 32 расположены со смещением в аксиальном направлении.
Из Фиг.2 легко заключить, что вращение плеча 19 вокруг вала 21 вызывает в основном радиальное движение захвата 02 внутрь и наружу и во всяком случае в меньшем объеме качательное движение захвата 02 вокруг оси 27, с которой шарнирно соединены несущая балка 16 и первое плечо 19. Вращение вала 24, напротив, приводило бы, если принять вал 21 неподвижным, к качательному движению захвата 02 вокруг оси 27.
Поэтому через оба дисковых кулачка 31, 32 возможно выполнение двухступенчатого движения. Благодаря дисковым кулачкам 31, 32 качательное движение и зажимное движение захвата 02 могут происходить в основном независимо одно от другого.
Снабженный захватами цилиндр 01, показанный на Фиг.2 в виде выреза, вращается против часовой стрелки. За предусмотренным в боковой поверхности цилиндра, в направлении часовой стрелки, отверстием для профиля 17 в боковую поверхность цилиндра вставлена эбонитовая полоска, которая служит, например, в качестве проходящей в аксиальном направлении контропоры 26 для ножей 06 ножевого барабана при разрезании полотна 07. Захват 02 расположен в направлении движения цилиндра 01 непосредственно перед контропорой 26 для разрезания. Расстояние а между кончиком захвата 02 в погруженном положении и краем контропоры 26 составляет менее 30 мм, в частности менее 10 мм. В показанной на Фиг.2 конфигурации, в которой захват 02 погружен внутрь снабженного захватами цилиндра 01, захват 02 может проходить резальный зазор 09, причем полотно 07 (на Фиг.2 не показано) разрезается на высоту контропоры 26. Чтобы при этом захватить образующуюся переднюю кромку 12 полотна 07 и прижать ее к контропоре 26, захват 02 выводится из снабженного захватами цилиндра 01.
На Фиг.3 показано промежуточное положение во время выдвигания захвата. Как можно видеть, между конфигурациями Фиг.2 и 3 вал 21 отчетливо повернулся против часовой стрелки, благодаря чему ось 27 сместилась радиально наружу и профиль 17 захвата выдвинулся из отверстия в боковой поверхности цилиндра. В результате небольшого вращения вала 24 по часовой стрелке захват 02, кроме того, повернулся по часовой стрелке вокруг оси 27, так что кончик свободного колена 18 профиля 17 лежит радиально над контропорой 26.
В результате поворота вала 21 по часовой стрелке, как показано на Фиг.4, ось 27 захвата 02 снова смещается радиально внутрь снабженного захватами цилиндра 01, так что свободный конец профиля 17 опускается на контропору 26 и при этом сжимает расположенный между ним и контропорой 26 передний конец полотна 07 (не показано).
После прохождения захвата 02 через фальцевальный зазор 13 захват 02 в результате вращения вала 21 против часовой стрелки снова приподнимается и сжатый между свободным концом и контропорой 26 печатный продукт 08 освобождается, как показано на Фиг.5. Из этой стадии вал 24 поворачивается против часовой стрелки, чтобы оттянуть свободное колено 18 захвата 02 над контропорой 26 и отверстием в боковой поверхности цилиндра. В результате последующего вращения вала 21 по часовой стрелке захват 02 снова оттягивается внутрь снабженного захватами цилиндра 01, в показанное на Фиг.2 положение. Захват 02 теперь готов к следующему проходу через резальный зазор 09.
Таким образом, можно видеть, что достаточно незначительного угла поворота захвата 02, чтобы он мог переместиться из зажимного положения в погруженное положение, и наоборот, и что радиальный ход также ограничивается в зависимости от толщины подлежащих обработке печатных продуктов 06 несколькими миллиметрами. Благодаря простой конструкции захвата 02 его вес и момент инерции незначительны. Короткие ходы между погруженным положением и зажимным положением захвата 02 требуют незначительных ускорений и тем самым умеренных, щадящих материал приводных усилий.
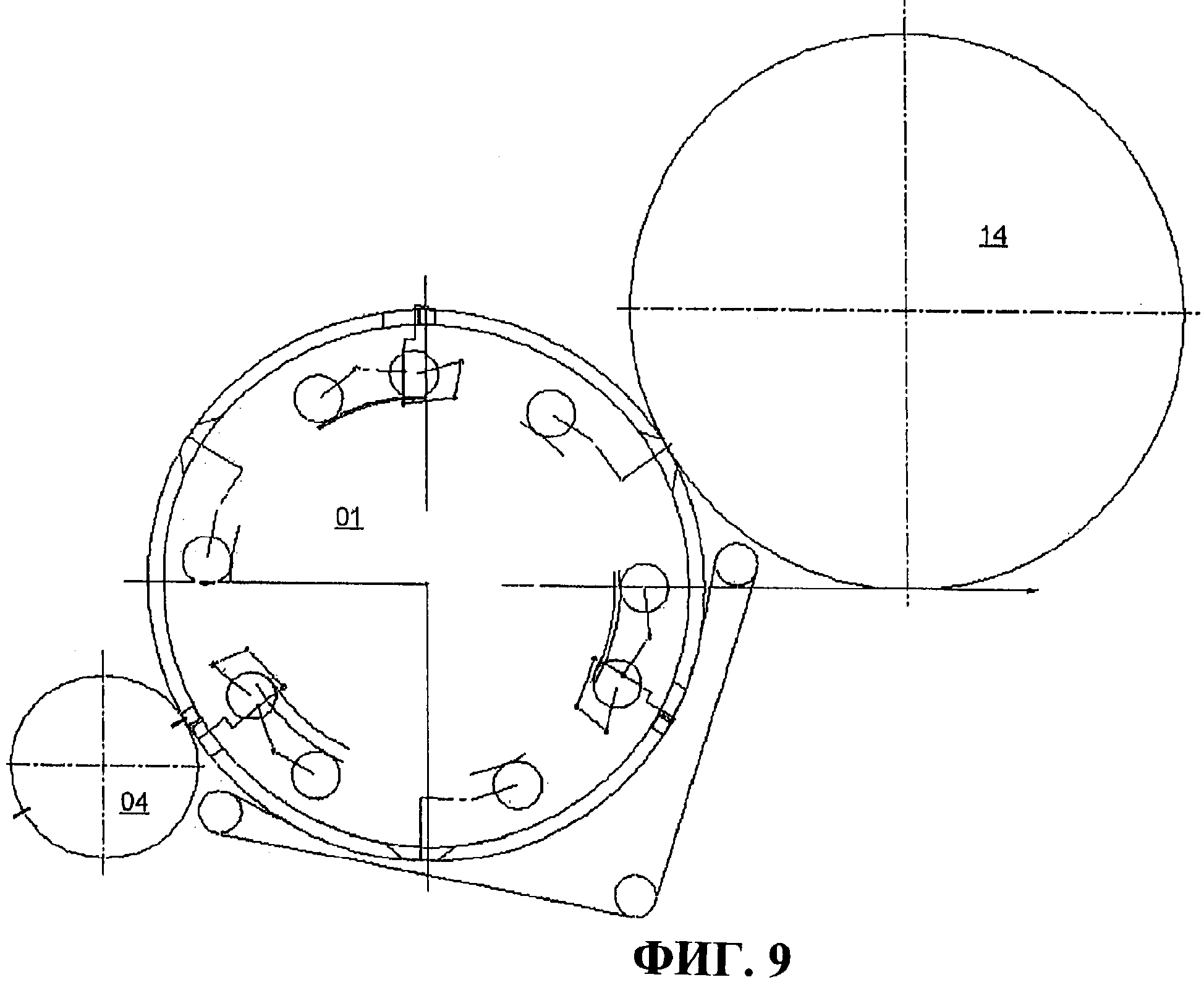
На Фиг.9 показан снабженный захватами цилиндр 01 с тремя захватными системами 02, например захватами 02, причем находящаяся в зоне ножевого барабана 04 захватная система 02 находится в погруженном положении, т.е. в позиции резания, находящаяся в зоне между ножевым барабаном 04 и клапанным цилиндром 14 фальцаппарата захватная система 02 находится в закрытом положении, т.е. в зажимной позиции, и расположенная после клапанного цилиндра 14 фальцаппарата захватная система 02 находится в открытом положении, т.е. в позиции отпускания.
Между ножевым барабаном 04 и клапанным цилиндром 14 фальцаппарата может быть дополнительно расположена конвейерная лента. Эти ленты прижимают отрезанные печатные продукты 06, т.е. сигнатуры, к боковой поверхности снабженного захватами цилиндра 01. В аксиальном направлении несколько лент расположены с расстоянием одна от другой, чтобы захваты 02 могли беспрепятственно двигаться в этих промежутках.
Конвейерная лента может приводиться в действие как снабженным захватами цилиндром 01, так и клапанным цилиндром 14 фальцаппарата. Но конвейерная лента может приводиться в действие также путем фрикционного замыкания или иметь собственный двигатель.
На Фиг.10 захватная система 02 схематически показана на виде сверху.
Реферат
Изобретение относится к цилиндру фальцевального аппарата (варианты). Цилиндр содержит корпус и захват с носиком. Захват способен перемещаться между погруженным внутри корпуса цилиндра положением, выдвинутым положением и зажимным положением. В зажимном положении носик захвата прижимает плоский материал снаружи к участку поверхности корпуса цилиндра. Захват совершает качательное движение вокруг оси между погруженным и выдвинутым положением. На корпусе цилиндра предусмотрена контропора для захвата захватами плоского материала. Во втором варианте исполнения предусмотрена одна конвейерная лента, частично взаимодействующая с цилиндром в зоне между ножевым барабаном и клапанным цилиндром фальцаппарата. Достигается создание цилиндра фальцевального аппарата, движение которого происходит с высокой точностью. 2 н. и 18 з.п. ф-лы, 10 ил.
Комментарии