Устройство для транспортирования листов в печатных машинах - RU2070113C1
Код документа: RU2070113C1
Чертежи





Описание
Изобретение относится к принадлежностям, предназначенным для печатных машин, в частности к листовыводному устройству для замедленной выкладки листов в печатных машинах.
Известно устройство, которое содержит механизмы регулирования выкладки печатной продукции, включающие ролик, соединенный с кареткой посредством торсиона и взаимодействующий с кулачком. В известном устройстве с помощью направляющего кулачка через взаимодействующий с ним ролик регулируется момент открытия захватов, при этом в случае более тяжелых печатных изделий положение кулачка выбирается с обеспечением сравнительно скорого открывания, т. е. захваты открываются раньше, чем в случае печатных изделий меньшего веса. Согласно описанию к известному устройству этим должно предотвращаться сильное ударение печатного изделия об упоры стапеля.
Недостаток этого устройства заключается в том, что точная и равномерная выкладка печатных изделий не обеспечена, и стапель получается неравномерным, в результате чего выступающие из стапеля печатные изделия могут повреждаться при дальнейшей перевозке стапеля (1).
На фиг.1
изображено устройство согласно изобретению ротационной печатной машины; на фиг.2 захватный механизм устройства согласно изобретению в увеличенном перспективном изображении;
на фиг. 3
захватный механизм устройства в нерабочем положении; на фиг.4 захватный механизм по фиг.2 в рабочем положении; на фиг.5 увеличенное изображение цепного транспортера в зоне выкладки устройства по фиг.1;
на фиг.6 увеличенное и упрощенное изображение цепного транспортера в зоне выкладки по фиг.5 в другом варианте выполнения изобретения; на фиг.7 увеличенное и упрощенное изображение цепного
транспортера в зоне выкладки по фиг.5 в следующем варианте выполнения изобретения.
На фиг.1 представлен цепной транспортер 1 листовыводного устройства согласно изобретению. Цепной транспортер направляется по приводному цепному колесу 2 и направляющему цепному колесу 3 и опирается на направляющие.
Цепной транспортер 1 снабжен захватными механизмами 4, расположенными на расстоянии друг от друга. Захватные механизмы 4 имеют помимо всего прочего известные сами по себе захваты 5, которые в варианте, показанном на фиг.1, если смотреть в направлении перемещения цепного транспортера 1, расположены вблизи цепного направляющего колеса 3. Захват 5 своим роликовым рычагом 6 перемещается по кулачку 7, открывающему захват, при этом лист 8 освобождается и укладывается относительно упоров 9 в стапель 10.
Здесь следует отметить, что цепные колеса 2, 3 имеются по обе стороны машины и соединены валом. Поэтому захватные механизмы 4 расположены между двумя цепными транспортерами 1.
Как видно на фиг. 2 и 3, по бокам захватного механизма расположены два козырька 11, шарнирно прикрепленные с помощью опорных пальцев 12 к цепным транспортерам 1 согласно фиг.1 и 2. Козырьки 11 имеют две направляющие 13, в которых расположена с возможностью перемещения каретка 14. На каретке 14 находятся захваты 5, состоящие из планки 15 для открывания захватов, рычага 16, роликового рычага 6, а также вала 17. Между шарниром 18 на козырьке 11 и шарниром 19 на каретке 14 расположена пружина растяжения 20.
Кроме того на обоих шарнирах 18, 19 закреплены концы обоих поводков 21, 22, соединенные друг с другом шарниром 23. На шарнире 23 смонтирован ролик 24.
На фиг. 4 захватный механизм показан в рабочем положении, т.е. ролик 24 взаимодействует с кулачком, причем каретка 14 перемещается под действием пружины растяжения 20 противоположно направлению перемещения А в направляющих 13. Угол между поводками 21, 22 по сравнению с фиг.3 увеличен от значения x до значения y согласно фиг.4.
На фиг.5 дано увеличенное изображение зоны выкладки цепного транспортера без цепного направляющего колеса 3. Здесь применяется захватный механизм 4, снабженный пружиной сжатия 25, т.е. каретка 14 перемещается под действием пружины сжатия 25 в направлении стрелки В. Пружина сжатия 25 закреплена между шарниром 19 и неподвижной точкой 26 на козырьке 11. Вместо пружины растяжения 20 или пружины сжатия 25 могут применяться другие эквивалентные им средства, например газовая пружина или витая изгибная пружина. Витая изгибная пружина устанавливается в этом случае в шарнире 23 в месте крепления ролика 24 и действует на оба поводка 21, 22.
Можно применять также торсионную пружину, которая устанавливается в поперечине между козырьками 11.
Силы инерции, возникающие при замедлении и следующим за ним ускорением каретки 14, лишь незначительно воздействуют на тяговое усилие цепи и, следовательно, на момент вращения. Большая часть этих сил гасится в захватных механизмах.
На фиг. 6 показан другой вариант выполнения устройства согласно фиг.5, причем для наглядности на чертеже не показаны отдельные элементы захватного механизма 4. Здесь кулачок 27 выполнен таким образом, что в момент подхода нижнего захватного механизма 4 к входному участку кулачка и контактирования ролика 24 с входным участком 28, предыдущий захватный механизм 4, если смотреть в направлении движения, скользит своим роликом 24 по участку 29 кулачка.
Благодаря выполнению входных участков 28, 29 кулачка для захватных механизмов 4 обеспечивается, что еще остающаяся незначительная часть сил инерции, действующая на цепной транспортер 1, компенсируется противодействующими силами инерции захватных механизмов 4, т.е. когда каретка 14 предыдущего захватного механизма 4, перемещающегося в направлении А, при переходе участка 28 в участок 29 получается ускорение, каретка 14 нижнего захватного механизма 4, перемещаясь по кулачку 27 и переходя на участок 28, замедляет свое перемещение. При этом участки 28, 29 кулачка 27 выполнены таким образом, что ролики 24 обоих захватных механизмов 4 одновременно взаимодействуют с соответствующими участками 28, 29.
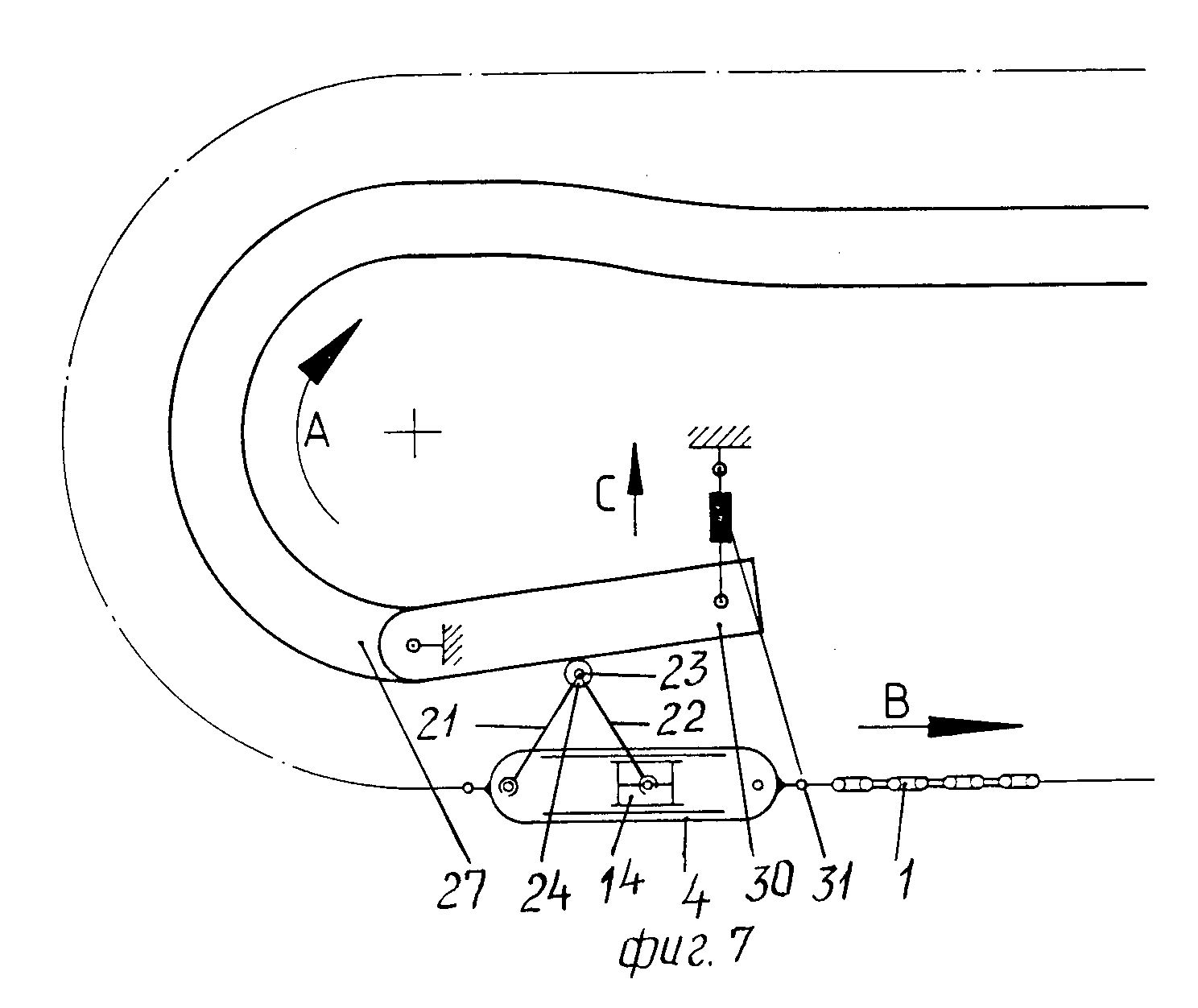
На фиг. 7 представлен еще один вариант выполнения устройства по фиг.5, причем отдельные элементы захватных механизмов 4 для наглядности на чертеже не показаны. Здесь кулачок 27 шарнирно связан со своим переставляемым участком 30. Перестановка участка 30 осуществляется с помощью регулирующего механизма 31, содержащего серводвигатель, или какого-либо другого механического, пневматического, гидравлического и т.п. регулирующего механизма. Регулирующий механизм 31 может быть также связан при независимом числе оборотов с устройством управления машиной.
Работа устройства осуществляется следующим образом.
Цепной транспортер 1 перемещается в направлении стрелки А. Согласно фиг. 7 захватный механизм 4 входит в зону переставляемого участка 30 кулачка. К ролику 24 в шарнире 23 прикладывается усилие, вследствие чего угол между поводками 21, 22 изменяется от значения x до значения y, как показано на фиг.3 и 4.
При этом каретка 14 перемещается в направляющих 12 в направлении стрелки В, т.е. против направления перемещения А. За счет этого относительного перемещения захват 5 замедляет скорость своего перемещения по отношению к окружной скорости цепи, открывается и лист 8 выдается к стапелю. Путем перестановки участка 30 кулачка скорость выкладки доводится приблизительно до нуля по сравнению с окружной скоростью цепного транспортера. При перестановке участка 30 кулачка в направлении стрелки С на фиг.7 замедление каретки 14 увеличивается. Таким образом, замедление каретки 14 может дополнительно регулироваться в зависимости от скорости машины. Поэтому при различных скоростях машины можно получить одинаковую скорость выкладки листов.
Устройство согласно изобретению позволяет выкладывать листы с желаемой скоростью. Благодаря регулируемости участка кулачка обеспечивается также возможность выкладки с одинаковой скоростью во всем диапазоне числа оборотов машины. Благодаря замедлению захвата можно работать с уменьшенными усилиями присасывания к присасывающему валику или другим присасывающим элементам, что имеет особенно большое значение для способа двухстороннего печатания. Кроме того, снижается подача сжатого воздуха на лист, что значительно облегчает стапелирование, так как снижается опасность образования воздушных подушек и перетаскивания при укладке листов. Одновременно предотвращается отклонение листов от установленного положения в зоне упора и деформирование вследствие сил инерции передней кромки отпечатанного материала при укладке. Действие сил инерции на захватный механизм уменьшается благодаря замедлению перемещения последнего, вследствие чего большая часть этих сил гасится в захватном механизме. С другой стороны, остальная часть этих сил компенсируется за счет противоположного выполнения входных участков кулачка, так как каретки захватных механизмов перемещаются в одно и то же время в соответствующих противоположных направлениях по отношению к направлению транспортирования по стрелке А.
Реферат
Использование: для замедленной выкладки в печатных машинах. Сущность изобретения: в устройстве, содержащем бесконечный цепной транспортер, перемещающийся по приводному цепному колесу и направляющему цепному колесу, захватные механизмы с захватами, расположенные на расстоянии друг от друга на бесконечном цепном транспортере, и поводки, захваты смонтированы на каретке, размещенной с возможностью перемещения под действием пружины противоположно направлению перемещения цепного транспортера в направляющих, смонтированных на козырьках захватных механизмов, причем первый поводок одним своим концом закреплен на козырьке, второй поводок одним концом закреплен на каретке, а другие концы первого и второго поводков соединены между собой посредством шарнира, который снабжен роликом, взаимодействующим с кулачком. 9 з.п.ф-лы, 7 ил.

Комментарии