Устройство и способ управления разматыванием полотна - RU2631390C9
Код документа: RU2631390C9
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству и способу управления выравниванием полотна при разматывании полотна с рулона.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Во время изготовления некоторых товаров могут понадобиться исходные материалы, которые предоставляются в виде полотен 2, намотанных на стержнях 3 в рулон. Например, в производственном процессе для производства впитывающих изделий, таких как подгузники, трусы для приучения к горшку, женские гигиенические впитывающие изделия, применяемые при недержании впитывающие изделия и т. п., могут применяться материалы, намотанные на рулоны, такие как, например, слои впитывающего изделия, эластичные элементы и элементы впитывающей сердцевины.
В целом, с полотнами 2, разматываемыми с рулонов, могут возникать проблемы, связанные с выравниванием полотна 2 во время производственного процесса. К некоторым причинам проблем, связанных с выравниванием полотна 2, можно отнести свойства материала полотна 2 или способы, которыми материал полотна 2 наматывают на стержень. Например, при разматывании некоторых материалов полотна 2 с рулона свойства материалов полотна 2 могут приводить к тому, что материал полотна 2 либо сжимается, либо закручивается и/или идет складками на самом себе в поперечном направлении полотна 2. В других ситуациях материал полотна 2 может быть намотан на рулон таким образом, что при разматывании полотна 2 с рулона обязательно возникает поперечное перемещение полотна 2. Например, материал полотна 2, разматываемый с полученного намоткой витками рулона 1b, должен перемещаться в поперечном направлении относительно длины 5 рулона, что приводит к тому, что большое количество полотна 2 спутывается во время производственного процесса. Кроме того, некоторые полотна 2 могут быть склонны идти складками на самих себе в поперечном направлении полотна 2, когда полотно 2 подвергается изменению направления на пути полотна 2, такому как поворот на 90 градусов. В некоторых случаях, полотно 2 может подвергаться скручиванию, которое предусматривается на пути полотна 2 в качестве средства поворота полотна 2 или уменьшения спутанности полотна 2. В известных из уровня техники системах полотно 2 может скручиваться посредством применения длинного неподвижного стержня и поддерживающего ролика или невращающегося неподвижного стержня. Скручивания, предусмотренные на пути полотна 2 для некоторых материалов полотна 2, могут приводить к неточности хода полотна 2, что может обуславливать то, что полотно 2 идет складками на самом себе. То, что полотно 2 идет складками, может также приводить к выключениям станка для корректировки пути полотна 2. Специалисту в данной области техники может быть понятно то, что проблемы, связанные с выравниванием или неточностью хода полотна 2, которые возникают раньше при разматывании полотна 2, влияют на выравнивание полотна 2 на всех остальных стадиях процесса. Обнаружение проблем, связанных с выравниванием полотна 2 в конце производственного процесса, также приводит к тому, что проблемы, связанные с выравниванием полотна 2, остаются на всех стадиях производственного процесса.
Проблемы, связанные с выравниванием или неточностью хода полотна 2, могут влиять на качество готовой продукции в отношении внешнего вида или функциональности. Элементы готовой продукции, выполненные из полотна 2, у которых есть проблемы, связанные с выравниванием полотна 2, могут не быть расположенными в требуемом месте в готовой продукции. Как известно специалисту в данной области техники, проблемы, связанные с выравниванием и неточностью хода полотна 2, могут также приводить к возникновению брака и задержек в производственном процессе, когда скорость станка снижается для регулирования материала полотна 2 с целью требуемого стыкования одного рулона с другим рулоном или с целью требуемого размещения материала полотна 2 в готовой продукции, например в разрезанном и уже вставленном элементе впитывающей сердцевины, таком как слой для распределения жидкости. Таким образом, остается необходимость в раннем обнаружении в производственном процессе проблем у полотен 2, связанных с выравниванием полотен 2, когда они разматываются с рулона. Еще остается необходимость в как можно более быстром устранении в производственном процессе проблем у полотен 2, связанных с выравниванием полотен 2. Кроме того, остается необходимость в отказе от скручивания полотна 2 в производственном процессе.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном варианте осуществления устройство для управления разматыванием полотна, намотанного на стержень для образования рулона, содержит поворачивающий стержень. Рулон имеет длину рулона. Поворачивающий стержень может быть выполненным с возможностью приема полотна, разматываемого со стержня так, что часть полотна, размотанная со стержня и расположенная между стержнем и поворачивающим стержнем, представляет собой входящее полотно, а часть полотна после входа в контакт с поворачивающим стержнем представляет собой выходящее полотно. Входящее полотно имеет ось входящего полотна, а выходящее полотно имеет ось выходящего полотна. Поворачивающий стержень обеспечивает целевое положение для приема входящего полотна. С поворачивающим стержнем соединен исполнительный механизм, и исполнительный механизм имеет ось перемещения, по существу параллельную оси выходящего полотна. Для измерения расположения в поперечном направлении полотна относительно целевого положения предусмотрен датчик, и датчик пребывает в электрической связи с исполнительным механизмом посредством контроллера. Датчик выполнен с возможностью передачи входного сигнала контроллеру при несоответствии расположения в поперечном направлении полотна целевому положению. Контроллер выполнен с возможностью предоставления выходного сигнала исполнительному механизму на основании входного сигнала. Исполнительный механизм выполнен с возможностью приема выходного сигнала с контроллера и перемещения поворачивающего стержня вдоль оси перемещения в ответ на выходной сигнал так, что полотно остается по существу на одной прямой с целевым положением.
В другом варианте осуществления устройство для управления разматыванием полотна, намотанного на стержень для образования рулона, содержит поворачивающий стержень, исполнительный механизм, датчик и контроллер. Рулон имеет длину рулона. Поворачивающий стержень может быть выполненным с возможностью приема полотна, размотанного со стержня так, что часть полотна, размотанная со стержня и расположенная между стержнем и поворачивающим стержнем, представляет собой входящее полотно, а часть полотна после входа в контакт с поворачивающим стержнем представляет собой выходящее полотно. Входящее полотно имеет ось входящего полотна, а выходящее полотно имеет ось выходящего полотна. Поворачивающий стержень обеспечивает целевое положение входящего полотна и целевое положение выходящего полотна. Датчик выполнен для измерения расположения в поперечном направлении входящего полотна относительно целевого положения входящего полотна. Датчик выполнен с возможностью передачи входного сигнала контроллеру при несоответствии расположения в поперечном направлении входящего полотна целевому положению. Контроллер выполнен с возможностью предоставления выходного сигнала исполнительному механизму на основании входного сигнала. Исполнительный механизм соединен с поворачивающим стержнем и выполнен с возможностью приема выходного сигнала с контроллера. Исполнительный механизм выполнен с возможностью перемещения поворачивающего стержня в ответ на выходной сигнал так, что полотно остается по существу на одной прямой с целевым положением.
В еще одном варианте осуществления в этой заявке предлагается способ управления разматыванием полотна, намотанного на стержень. Способ включает предоставление поворачивающего стержня для приема полотна, размотанного со стержня, при этом поворачивающий стержень имеет целевое положение. Поворачивающий стержень соединяют с исполнительным механизмом. Исполнительный механизм имеет ось перемещения, которая по существу параллельна оси части полотна после входа полотна в контакт с поворачивающим стержнем. Для измерения расположения в поперечном направлении полотна относительно целевого положения предусматривают датчик. Датчик передает сигнал исполнительному механизму на основании измерений, полученных от датчика, при несоответствии расположения в поперечном направлении полотна целевому положению. Исполнительный механизм перемещает поворачивающий стержень вдоль оси перемещения на основании сигнала, полученного исполнительным механизмом, так, что полотно находится по существу на одной прямой с целевым положением.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
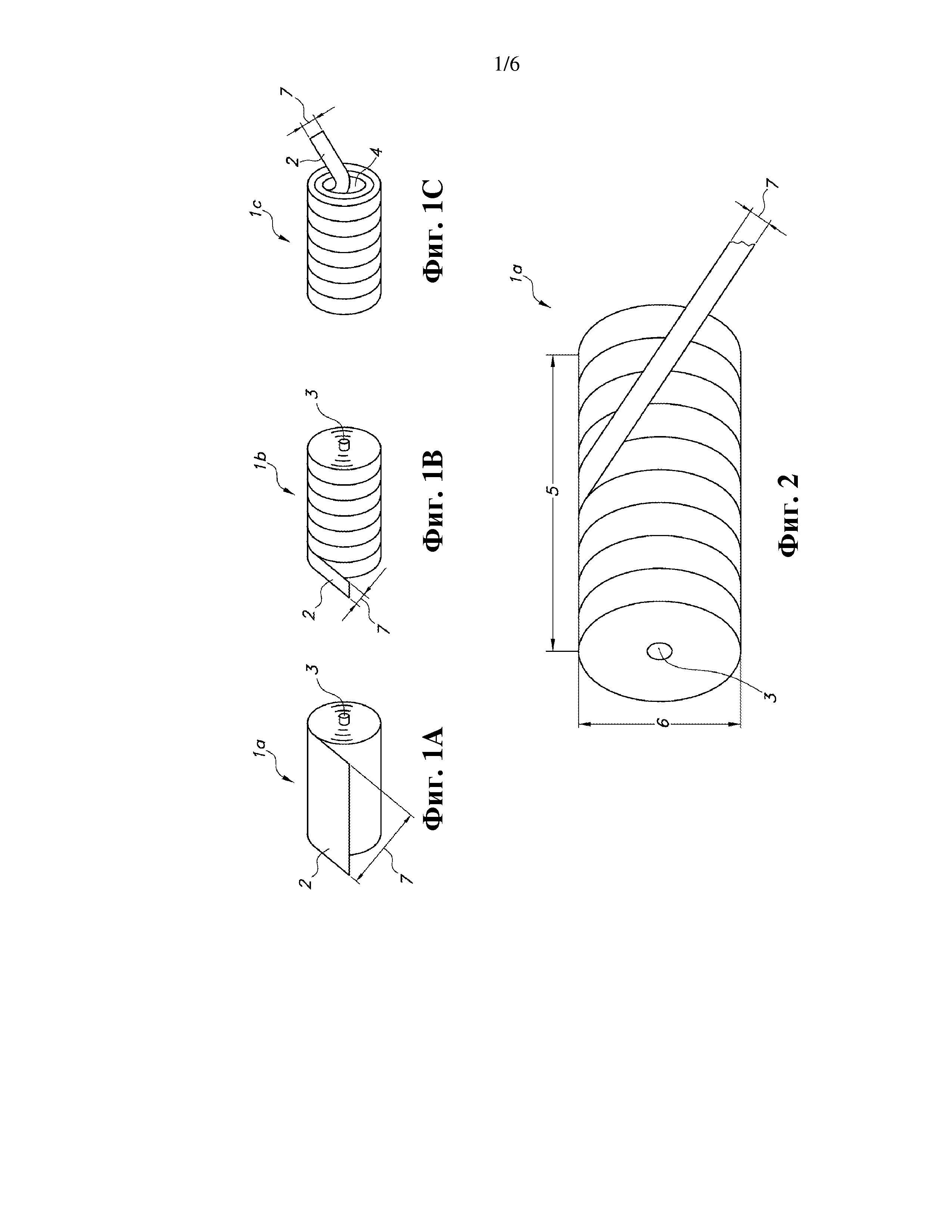
На фиг.1A схематически показан вид в перспективе обычного рулона материала полотна.
На фиг. 1B схематически показан вид в перспективе рулона из намотанного витками материала полотна.
На фиг. 1C схематически показан вид в перспективе рулона из намотанного с центральной подачей материала полотна.
На фиг. 2 схематически показан другой вид в перспективе рулона из намотанного витками материала полотна.
На фиг. 3 схематически показан вид в перспективе представленного в качестве примера устройства согласно настоящему изобретению и процесс применения устройства.
На фиг. 4 схематически показан вид сверху полотна, получаемого поворачивающим стержнем в целевом положении входящего полотна и, таким образом, покидающего поворачивающий стержень в целевом положении выходящего полотна.
На фиг. 5 схематически показан вид сверху целевого положения входящего полотна и целевого положения выходящего полотна на поворачивающем стержне согласно настоящему изобретению.
На фиг. 6 схематически показан вид в перспективе предпочтительного варианта осуществления устройства согласно настоящему изобретению, при этом поворачивающий стержень удален для ясности.
На фиг. 7 схематически показан другой вид в перспективе предпочтительного варианта осуществления устройства согласно настоящему изобретению.
На фиг. 8 схематически показан вид сверху полотна, полученного поворачивающим стержнем, которое не находится на одной прямой с целевым положением входящего полотна и, таким образом, покидает поворачивающий стержень не на одной прямой с целевым положением выходящего полотна.
Повторное использование ссылочных позиций в настоящем описании и в графических материалах направлено на представление одинаковых или аналогичных признаков или элементов настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству 1 и способу управления разматыванием полотна 2 с рулона. Материал полотна 2 сначала может быть намотан на стержень 3 самыми разнообразными способами для получения рулона, при этом рулон обладает длиной 5 рулона и диаметром 6 рулона. В том смысле, в котором применяется в настоящем документе, длина 5 рулона означает длину материала полотна 2 вдоль длины стержня 3, на котором материал полотна 2 намотан. Является возможным то, что длина стержня 3 может представлять собой такую же длину, что и длина 5 рулона. В некоторых случаях длина стержня 3 может быть больше, чем длина 5 рулона; то есть часть стержня 3 может выходить за пределы области, в которой материал полотна 2 намотан на стержень 3. В зависимости от конечного применения и/или требований к доставке можно применять различные типы намотки в рулоны. На фиг. 1A показан обычный рулон 1a. Обычный рулон 1a получен намоткой материала полотна 2 вокруг стержня 3 путем накручивания материала полотна 2 на самого себя несколько раз. Полотно 2 перемещается с внешней стороны рулона 1a. Ширина 7 полотна в обычном рулоне 1a в целом такая же, как и длина 5 рулона. На фиг. 1B показан полученный намоткой витками рулон 1b. Полученный намоткой витками рулон 1b получен намоткой материала полотна 2 вокруг стержня 3 путем накручивания с поперечным перемещением материала полотна 2 вдоль длины 5 рулона несколько раз. Полотно 2 перемещается с внешней стороны рулона 1b. Ширина 7 полотна меньше, чем длина 5 рулона, а в большинстве случаев — значительно меньше, чем длина 5 рулона. Как показано на фиг. 1c, полученный намоткой с центральной подачей рулон 1c получен подобно полученному намоткой витками рулону 1b, за исключением того, что стержень 3 снят и полотно 2 перемещается, или подается, из центра 4 рулона. В случае полученного намоткой с центральной подачей рулона 1c, подобно полученному намоткой витками рулону 1b, ширина 7 полотна тоже меньше, чем длина 5 рулона.
Полотна 2, разматываемые с полученных намоткой витками рулонов 1b, должны раскручиваться с поперечным перемещением по всей длине 5 рулона, так что полотно 2 уходит с рулона 1b в разных точках вдоль длины 5 рулона. Поперечное перемещение вдоль длины 5 полученного намоткой витками рулона 1b фактически создает спутывание большого количества полотна 2 во время производственного процесса. Например, когда полотно 2 разматывается с концов полученного намоткой витками рулона 1b, то полотно 2 поступает в производственный процесс под углом α, который больше предельного, чем когда полотно 2 разматывается с середины полученного намоткой витками рулона 1b. То, что полотно 2 покидает полученный намоткой витками рулон 1b под углами α, которые больше предельного, также может приводить к тому, что полотно 2 переворачивается или идет складками на самом себе в поперечном направлении. При размотке полотна 2 проблемы, связанные с выравниванием полотна 2, которое может быть несимметричным, могут усложняться другими факторами, в том числе высокими скоростями станка и свойствами полотна 2. Например, некоторые полотна 2 могут обладать свойствами, которые меняются между сторонами или поверхностями полотна 2.
На проблемы, связанные с выравниванием и неточностью хода полотна 2, также могут влиять материалы полотна 2, которые склонны либо к сжиманию, либо к закручиванию и/или идут складками на самих себе в поперечном направлении полотна 2 при размотке с рулона, такие как, например, материалы, характеризующиеся определенной степенью растягивания или отсутствием способности к восстановлению. Некоторые материалы, применяемые в производственных процессах, такие как, например, те, которые применяются для производства впитывающих изделий, могут представлять собой материалы, которые могут обуславливать проблемы, связанные с выравниванием полотна 2. Другими примерами материалов, которые могут обуславливать проблемы, связанные с выравниванием полотна 2, являются многослойные, или композитные, материалы. Такие материалы могут проявлять свойства поверхности, которые отличаются от свойств противоположной поверхности. Например, материал, который можно применять в качестве слоя для поглощения/распределения жидкости во впитывающем изделии, может быть двухслойным, нетканым, волокнистым композитным материалом, при этом два слоя связаны водоструйным скреплением, и одна поверхность гладкая, а противоположная поверхность содержит выступы. К другим примерам относятся, но этим они не ограничиваются, однослойный волокнистый нетканый материал, у которого на одной поверхности нанесено покрытие, а на противоположной поверхности — нет; однослойный волокнистый нетканый материал, у которого на одной поверхности нанесено одно покрытие, тогда как на противоположной поверхности нанесено покрытие, которое отличается от покрытия на другой поверхности; или однослойный пленочный нетканый материал, у которого на одной поверхности нанесено покрытие, а на противоположной поверхности — нет. К материалам полотна 2, которые можно привести в качестве примеров материалов, обуславливающих проблемы, связанные с выравниванием полотна 2, могут относиться, но этим они не ограничиваются, пленки из пластмассы и/или нетканые полотна, которые можно применять в качестве элементов во впитывающих изделиях, таких как, например, материалы внешнего покрытия, материалы для поглощения или распределения мочи или экскрементов, поясные эластичные элементы и эластичные элементы для ног. Тканые материалы тоже могут быть склонными к сжиманию или закручиванию и/или идут складками на самих себе в поперечном направлении полотна 2 при размотке с рулона. Термин «впитывающее изделие» в данном документе относится к изделию, которое может быть размещено вплотную на теле или вблизи тела (т. е. в соприкосновении с телом) пользователя для впитывания и удержания различных жидких и твердых выделений, выделяемых телом. Неограничивающими примерами впитывающих изделий являются впитывающие изделия личной гигиены, такие как подгузники, трусы-подгузники, трусы для приучения к горшку, одежда для купания, впитывающие трусы, изделия для взрослых, страдающих недержанием, в том числе предметы одежды и впитывающие прокладки, наматрасники, женские гигиенические прокладки или подкладки, вводимые пальцами тампоны, поглощающие пот прокладки, обувные стельки, подкладки для шлемов, влажные салфетки, ткани, полотенца, салфетки и т. п., а также медицинские впитывающие изделия, такие как медицинские впитывающие предметы одежды, бандажи, маски, раневые повязки, хирургические бандажи и губки, впитывающие подстилки и т. п.
Согласно настоящему изобретению предлагается устройство 1 и способ для преодоления проблем, связанных с выравниванием полотна 2, которые могут возникнуть при разматывании полотна 2 с рулона. Как показано со ссылкой на фиг. 3—5, в одном варианте осуществления полотно 2 разматывается с полученного намоткой витками рулона 1b, как представлено на фиг. 3, однако устройство 1 и способ, описанные в настоящем документе, можно применять с другими типами рулонов, такими как рассмотренные выше. Устройство 1 содержит поворачивающий стержень 10, датчик 30 и исполнительный механизм 20 (в целях ясности на фиг. 3 не показан). Поворачивающий стержень 10 принимает входящее полотно 12, то есть часть полотна 2, которая разматывается со стержня 3 и расположена между стержнем 3 и поворачивающим стержнем 10. Выходящее полотно 14 представляет собой часть полотна 2 после введения в контакт с поворачивающим стержнем 10. Входящее полотно 12 имеет ось 16 входящего полотна, которая может быть по существу параллельной продольному направлению 40, а выходящее полотно 14 имеет ось 18 выходящего полотна, которая может быть по существу параллельной боковому направлению 42, как представлено на фиг. 4. Поворачивающие стержни 10 применяются на пути полотна 2 для изменения направления полотна 2 во время производственного процесса. Поворачивающие стержни 10 могут быть размещены под углом α относительно оси 16 входящего полотна, которая параллельна продольному направлению 40. Зачастую поворачивающий стержень 10 расположен под углом α, составляющим 45 градусов, для поворота входящего полотна 12 так, что ось 18 выходящего полотна расположена под приблизительно 90 градусов, или по существу перпендикулярно, относительно оси 16 входящего полотна. Представленные в качестве примера вариант осуществления и расположение поворачивающего стержня 10, показанные и рассмотренные в настоящем документе, обеспечивают поворот полотна 2 на 90 градусов, при этом ось 16 входящего полотна по существу перпендикулярна оси 18 выходящего полотна. Однако в устройстве 1 и способе могут использоваться поворачивающие стержни 10, расположенные для получения других углов α между осью 16 входящего полотна и осью 18 выходящего полотна. Можно отметить то, что поворачивающий стержень 10 может быть расположенным под любым углом α для обеспечения необходимого поворота на пути полотна 2 в том или ином производственном процессе, например от 1 градуса до 89 градусов и, в частности, от приблизительно 10 градусов до приблизительно 80 градусов. Как представлено на фиг. 4 и фиг. 5, поворачивающий стержень 10 обеспечивает целевое положение, которое представляет собой целевое положение 51 входящего полотна и целевое положение 52 выходящего полотна. Как представлено на фиг. 4, поворачивающий стержень 10 принимает входящее полотно 12 в целевом положении 51. Целевое положение 51 входящего полотна на поворачивающем стержне 10, в свою очередь, обеспечивает целевое положение 52 выходящего полотна, также представленное на фиг. 5. Целевое положение 52 выходящего полотна представляет собой положение на поворачивающем стержне 10, при котором выходящее полотно 14 должно входить в контакт с поворачивающим стержнем 10, если входящее полотно 12 входит в контакт с поворачивающим стержнем 10 в целевом положении 51 входящего полотна. Несмотря на то, что целевое положение 51 входящего полотна и целевое положение 52 выходящего полотна показаны на фиг. 4 и фиг. 5 в виде зон, которые соответствуют ширине 7 полотна, целевое положение может быть взято как точка или ширина, которая меньше, равна или в несколько раз больше ширины 7 полотна. Целевое положение может быть сколь угодно малым или большим, пока оно служит базовым положением по отношению к полотну 2. Поворачивающий стержень 10 может быть изготовленным из материалов, которые обладают низким трением и уменьшают сопротивление полотна 2, например из полированной стали или с соответствующим покрытием, и/или поворачивающий стержень 10 может предусматривать применение в сочетании с воздухом, но не ограничивается такими конфигурациями.
Как представлено на фиг. 6 и 7, устройство 1 дополнительно содержит исполнительный механизм 20. Исполнительный механизм 20 содержит приводной механизм 21, который размещен внутри исполнительного механизма 20. Приводной механизм 21 может обеспечивать перемещение элемента, такого как, например, каретка 26, который может быть соединенным с исполнительным механизмом 20. Приводной механизм 21 может содержать мотор и определенное средство для сообщения этого перемещения каретке 26. Например, на фиг. 6 и 7 представлен вид в разрезе, где видно приводной механизм 21 с ремнем, при этом ремень 23 показан на ременном шкиве 27 (в целях ясности все элементы приводного механизма 21 с ремнем не показаны), при этом ремень 23 может быть соединен с кареткой 26 посредством элемента 28 для соединения с кареткой, так что линейное перемещение ремня 23 может обеспечивать каретке 26 линейное перемещение.
Как представлено на фиг. 6 и 7, каретка 26 может быть с возможностью перемещения соединена с исполнительным механизмом 20. Исполнительный механизм может содержать направляющую 25 для каретки, на которой каретка 26 может осуществлять перемещение, такое как, например, скользящее перемещение. С кареткой 26 также может быть соединена опорная пластина 24. С опорной пластиной 24 может быть соединен держатель 22 поворачивающего стержня, при этом поворачивающий стержень 10 может быть соединен с держателем 22 поворачивающего стержня.
Датчик 30 устройства 1 пребывает в электрической связи с исполнительным механизмом 20 и может быть выполненным для измерения поперечного перемещения 1) входящего полотна 12 относительно целевого положения 51 входящего полотна или 2) выходящего полотна 14 относительно целевого положения 52 выходящего полотна. Например, может быть обнаружено несоответствие 60 целевого положения входящего полотна, когда имеет место несоответствие тому, где входящее полотно 12 входит в контакт с поворачивающим стержнем 10 относительно целевого положения 51 входящего полотна. Что касается обнаружения датчиком 30 несоответствия 60 целевого положения входящего полотна, то входящее полотно 12 содержит левую кромку 12a входящего полотна и правую кромку 12b входящего полотна, и целевое положение 51 входящего полотна содержит левую кромку 51a целевого положения входящего полотна и правую кромку 51b целевого положения входящего полотна. Датчик 30, например, может обнаружить несоответствие 60 целевого положения входящего полотна, когда левая кромка 12a входящего полотна находится не на одной прямой с левой кромкой 51a целевого положения входящего полотна или когда правая кромка 12b входящего полотна находится не на одной прямой с правой кромкой 51b целевого положения входящего полотна. В таком случае датчик 30 может называться датчиком положения кромки. Как показано на фиг. 8, поперечное перемещение входящего полотна 12 может иметь место до левой стороны 51a целевого положения входящего полотна или до правой стороны 51b целевого положения входящего полотна. Как представлено на фиг. 4, 5 и 8, поперечное перемещение входящего полотна 12 по существу параллельно боковому направлению 42.
В качестве альтернативы, датчик 30 может обнаружить несоответствие 62 целевого положения выходящего полотна, при этом выходящее полотно 14 содержит нижнюю кромку 14a выходящего полотна и верхнюю кромку 14b выходящего полотна, и целевое положение 52 выходящего полотна содержит нижнюю кромку 52a целевого положения выходящего полотна и верхнюю кромку 52b целевого положения выходящего полотна. Как также показано на фиг. 8, несоответствие 62 целевого положения выходящего полотна может обнаружено, когда имеет место несоответствие тому, где выходящее полотно 14 входит в контакт с поворачивающим стержнем 10 относительно целевого положения 52 выходящего полотна, так что поперечное перемещение выходящего полотна 14 может происходить выше верхней стороны 52b целевого положения выходящего полотна или ниже нижней стороны 52a целевого положения выходящего полотна. Как представлено на фиг. 4, 5 и 8, поперечное перемещение выходящего полотна 14 по существу параллельно продольному направлению 40.
Датчик 30 другого типа может обнаружить центральную линию 12c входящего полотна относительно некой исходной точки, такой как, например, центральная линия 51c целевого положения входящего полотна, при этом центральная линия 12c входящего полотна и центральная линия 51c целевого положения входящего полотна коллинеарны с осью 16 входящего полотна. Датчик 30 может обнаружить несоответствие 60 целевого положения входящего полотна, когда центральная линия 12c входящего полотна находится не на одной прямой с центральной линией 51c целевого положения входящего полотна. В качестве альтернативы, датчик 30 может обнаружить центральную линию 14c выходящего полотна относительно некой исходной точки, такой как, например, центральная линия 52c целевого положения выходящего полотна, при этом центральная линия 14c выходящего полотна и центральная линия 52c целевого положения выходящего полотна коллинеарны с осью 18 выходящего полотна. Датчик 30 может обнаружить несоответствие 62 целевого положения выходящего полотна, когда центральная линия 14c выходящего полотна находится не на одной прямой с центральной линией 52c целевого положения выходящего полотна. Поперечное перемещение входящего полотна 12 в боковом направлении 42 непосредственно влияет на поперечное перемещение выходящего полотна 14 в продольном направлении 40, при этом ось 16 входящего полотна по существу параллельна продольному направлению 40, а ось 18 выходящего полотна по существу параллельна боковому направлению 42, как представлено на фиг.4, фиг. 5 и фиг. 8.
В одном варианте осуществления исполнительный механизм 20 устройства 1 представляет собой электронное устройство, которое может обеспечить линейное перемещение по оси 29 перемещения, так что ось 29 перемещения по существу параллельна оси 18 выходящего полотна, как представлено на фиг. 7. Исполнительный механизм 20 выполнен с возможностью приема сигнала от датчика 30, при этом поворачивающий стержень 10 перемещается для удерживания входящего полотна 12 по существу на одной прямой с целевым положением 51 входящего полотна и/или выходящего полотна 14 по существу на одной прямой с целевым положением 52 выходящего полотна. Исполнительный механизм 20 устройства 1 может представлять собой исполнительный механизм 20 с вращательным движением, который может также применяться для обеспечения линейных перемещений за счет преобразования вращательного движения в поступательное движение с применением, например, винтового, кулачкового, храпового, цепного или ременного механизмов. В качестве альтернативы, некоторые исполнительные механизмы 20, такие как, например, пьезоэлектрические исполнительные механизмы, исполнительные механизмы с линейным мотором или исполнительные механизмы с подвижной катушкой, обеспечивают прямое, линейное перемещение. Примером исполнительного механизма 20 устройства 1 является исполнительный механизм с ременным приводом, доступный от компании Tolomatic, Хамел, Миннесота, США, модель B3W15/M3W15. Следует понимать, что исполнительный механизм 20 может обеспечивать любое перемещение, такое как, например, вращательное, несмотря на то, что линейное перемещение рассматривается как один из путей получения ответа от исполнительного механизма 20 на сигнал от датчика 30. Кроме того, исполнительный механизм 20 может перемещаться в более чем одном линейном направлении. Например, предусматривается то, что исполнительный механизм 20 может обеспечивать движение в направлении, параллельном оси 18 выходящего полотна и/или оси 16 входящего полотна.
Представленные в качестве примера исполнительные механизмы 20, которые могут применяться при разматывании полученных намоткой витками рулонов 1b, должны быть способными обеспечить подходящую длину хода, соответствующую длине 5 рулона. В вариантах осуществления, предназначенных для применения с полученными намоткой витками рулонами 1b, 1), исполнительный механизм 20 должен быть способным к по меньшей мере перемещению вдоль всей длины 5 рулона, когда входящее полотно 12 входит в контакт с поворачивающим стержнем 10; и 2) исполнительный механизм 20 может также обеспечить длину хода, превышающую длину 5 рулона, для обеспечения возможности обнаружения несоответствия 60 целевого положения входящего полотна или несоответствия 62 целевого положения выходящего полотна, которые могут возникать на каждом из концов полученного намоткой витками рулона 1b, определяющих длину 5 рулона. Например, длина хода исполнительных механизмов 20, применяемых в производственном процессе впитывающих изделий, может представлять собой длину от приблизительно 120 мм до приблизительно 1500 мм и, в частности, от приблизительно 600 мм до приблизительно 900 мм. Несмотря на то, что была рассмотрена длина хода, обычно применяемая в изготовлении впитывающих изделий, следует понимать, что в случае других применений может использоваться длина хода, выходящая за пределы указанного диапазона. Представленные в качестве примера исполнительные механизмы 20 также способны перемещаться со скоростями, которые согласуются со скоростью входящего полотна 12 относительно диаметра 6 рулона; то есть скорость исполнительного механизма 20 меньше, когда у полученного намоткой витками рулона 1b диаметр 6 рулона полный, и скорость исполнительного механизма 20 увеличивается, когда входящее полотно 12 разматывается с рулона 1b и приближается к стержню 3.
Датчик 30 и исполнительный механизм 20 могут пребывать в электрической связи друг с другом за счет пребывания в электрической связи с программным обеспечением, которое предусмотрено в контроллере 70. Контроллер 70 может представлять собой программируемый логический контроллер (PLC) и/или может быть предусмотренным в компьютере или центральном процессоре (CPU). Исполнительный механизм 20 выполнен с возможностью перемещения поворачивающего стержня 10 на основании выходных сигналов, полученных от контроллера 70. Сигнал, отправленный с контроллера 70 исполнительному механизму 20, определен управлением с обратной связью, то есть на основании входной информации, полученной контроллером 70 от датчика 30 посредством входных сигналов от датчика 30. За счет управления с обратной связью можно рассчитать величину ошибки, или несоответствие между измеренной переменной и требуемой заданной величиной, такое как, например, несоответствие 60 целевого положения входящего полотна или несоответствие 62 целевого положения выходящего полотна. Датчик 30 отправляет величину ошибки контроллеру 70, при этом контроллер 70 стремится свести к минимуму величину ошибки путем отправки надлежащего выходного сигнала исполнительному механизму 20 для запуска перемещения исполнительного механизма 20 и, следовательно, поворачивающего стержня 10. Некоторые примеры управления с обратной связью включают, но без ограничения, пропорциональное управление, пропорционально-интегральное (PI) управление или пропорционально-интегрально-дифференциальное (PID) управление.
В одном варианте осуществления, как представлено на фиг. 7, датчик 30 может обнаружить несоответствие 60 целевого положения входящего полотна. Датчик 30 передает сигнал контроллеру 70, и, если необходимо, контроллер 70 предоставляет сигнал исполнительному механизму 20 для изменения расположения поворачивающего стержня 10. Исполнительный механизм 20 может вызывать перемещение поворачивающего стержня 10, задействуя приводной механизм 21 для обеспечения скользящего перемещения каретки 26 вдоль направляющей 25 для каретки в направлении оси 29 перемещения. Перемещение каретки 26, в свою очередь, перемещает опорную пластину 24, к которой поворачивающий стержень 10 прикреплен посредством держателя 22 поворачивающего стержня.
В одном варианте осуществления датчик 30 может быть размещен на пути полотна 2 в месте 1) перед поворачивающим стержнем 10 для обнаружения входящего полотна 12, например в месте 32 для датчика входящего полотна, или 2) за поворачивающим стержнем 10 для обнаружения выходящего полотна 14, например в месте 34 для датчика выходящего полотна, как представлено на фиг. 3. В другом варианте осуществления датчик 30 может быть соединенным с исполнительным механизмом 20 для обнаружения выходящего полотна 14. В еще одном другом варианте осуществления, который является предпочтительным, датчик 30 соединен с исполнительным механизмом 20 для обнаружения входящего полотна 12, как представлено на фиг. 6 и фиг. 7. Конфигурация устройства 1 согласно этому варианту осуществления обеспечивает ряд преимуществ, в том числе: 1) раннее обнаружение несоответствия 60 целевого положения входящего полотна; 2) более быстрое внесение корректировок для устранения проблем, связанных с выравниванием или неточностью хода полотна 2, на основании несоответствия 60 целевого положения входящего полотна до того, как проблемы, связанные с выравниванием полотна 2, возникнут дальше ниже по потоку; 3) сниженная вероятность того, что материал полотна 2 пойдет складками на самом себе или скрутится; 4) уменьшенный простой станка; 5) меньшее количество этапов обработки, так как, например, исчезает необходимость в этапах скручивания полотна 2; 6) меньшее количество выключений станка; 7) повышенное качество изделий; и 8) уменьшенный объем брака.
В одном варианте осуществления способ управления разматыванием полотна 2, намотанного на стержень 3, включает предоставление поворачивающего стержня 10 для приема входящего полотна 12 в целевом положении 51 входящего полотна. Поворачивающий стержень 10 может быть соединенным с исполнительным механизмом 20, при этом исполнительный механизм 20 имеет ось 29 перемещения, которая по существу параллельна оси 18 выходящего полотна, как показано на фиг. 6 и 7. Для измерения несоответствия 60 положения входящего полотна или несоответствия 62 положения выходящего полотна предусмотрен датчик 30. Датчик 30 передает сигнал исполнительному механизму 20 за счет применения контроллера 70, когда имеется несоответствие 60 положения входящего полотна или несоответствие 62 положения выходящего полотна в отношении целевого положения 51 входящего полотна или целевого положения 52 выходящего полотна соответственно. Исполнительный механизм 20 перемещает поворачивающий стержень 10 вдоль оси 29 перемещения на основании сигнала, полученного с контроллера 70 на основании показаний датчика 30, так что входящее полотно 12 находится по существу на одной прямой с целевым положением 51 входящего полотна. Датчик 30 может быть соединенным с исполнительным механизмом 20, как показано на фиг. 6 и 7. Преимущество такой конфигурации заключается в том, что датчик 30 может перемещаться в поперечном направлении с поворачивающим стержнем 10 и, таким образом, с входящим полотном 12. При такой конфигурации может отсутствовать необходимость в том, чтобы ширина датчика 30 была такой же, как и при конфигурации, в которой датчик 30 не соединен с исполнительным механизмом 20. Например, при конфигурации, в которой датчик 30 не соединен с исполнительным механизмом 20, как показано на фиг. 3, может быть необходимо, чтобы ширина датчика 30 была очень большой, например, больше, чем длина 5 рулона, для обнаружения несоответствия 60 целевого положения входящего полотна или несоответствия 62 целевого положения выходящего полотна, что может обуславливать большее поперечное перемещение поворачивающего стержня 10 для корректировки выравнивания полотна 2.
При представлении элементов настоящего изобретения или его предпочтительного варианта (вариантов) осуществления употребление терминов в единственном или множественном числе, а также в сопровождении определения «указанный» предусматривает, что существует один или несколько элементов. Термины «содержащий», «включающий» и «имеющий» имеют включающий смысл и означают, что могут существовать дополнительные элементы, отличные от перечисленных. Без отклонения от сути и объема настоящего изобретения может быть предложено много его модификаций и вариантов. Следовательно, представленные в качестве примера варианты осуществления, описанные выше, не должны применяться для ограничения объема изобретения.
Реферат
Группа изобретений относится к области размотки полотен. Устройство для управления разматыванием намотанного на стержень полотна содержит поворачивающий стержень, исполнительный механизм, датчик и контроллер. Поворачивающий стержень имеет целевое положение для приема полотна. Исполнительный механизм соединен с поворачивающим стержнем и имеет ось перемещения. Датчик измеряет расположение в поперечном направлении полотна относительно целевого положения и передает входной сигнал контроллеру. Сигнал передается при несоответствии расположения в поперечном направлении полотна целевому положению. Контроллер предоставляет выходной сигнал исполнительному механизму. Исполнительный механизм перемещает поворачивающий стержень вдоль оси перемещения так, что полотно остается по существу на одной прямой с целевым положением. Обеспечивается быстрое обнаружение и устранение проблем, связанных с выравниванием полотен. Исключается скручивание полотен. 3 н. и 16 з.п. ф-лы, 10 ил.
Комментарии