Способ передачи табачных изделий и устройство дляего осуществления - RU2226485C2
Код документа: RU2226485C2
Чертежи







Описание
Настоящее изобретение относится к способу передачи изделий.
В частности, настоящее изобретение относится к способу передачи табачных изделий, например, сигарет или пачек сигарет.
В табачной промышленности пачки сигарет, как известно, изготавливают путем формирования групп сигарет, каждая из которых образована по крайней мере одним слоем сигарет, упаковывают группы в упаковочный материал для образования пачек, заклеивают упаковочный материал клеящим веществом и высушивают клеящее вещество для стабилизации пачек.
Используемые в настоящее время системы для осуществления упомянутого выше способа содержат одну или больше упаковочных машин шагового действия, т.е. такого типа, в которых сигареты, подаваемые россыпью во входной питатель упаковочной машины, отбирают из питателя и подают группами, обычно содержащими двадцать сигарет, на транспортер шагового действия. Транспортер обычно содержит последовательность ячеек, которые по мере продвижения транспортера на шаг последовательно задерживают около загрузочной станции перед питателем для приема соответствующей группы сигарет. Сформированные и переданные на транспортер группы сигарет размещают в ячейках последующих транспортеров, образующих траекторию манипулирования и упаковки, по которой группы передают в шаговом режиме для выполнения упомянутых процессов упаковки, заклеивания и сушки.
Хотя упаковочные машины шагового действия упомянутого выше типа весьма эффективны и надежны, они, как и любые другие машины периодического действия, что вполне очевидно, обладают рядом недостатков: с одной стороны, сильной вибрацией, высоким уровнем шума и относительно высокой стоимостью технического обслуживания, главным образом из-за чрезвычайно высокой скорости, на которой они работают, а с другой стороны, тем недостатком, что скорость транспортеров может быть повышена только до определенного предела.
С целью преодоления упомянутых выше недостатков и с учетом постоянного требования увеличения выпуска таких машин для упаковки современная тенденция заключается в создании машин, в которых все транспортеры действуют постоянно, для преодоления предела скорости, обычного для транспортеров шагового действия.
В противоположность изложенной выше тенденции, однако, представляется, что некоторые операции, такие как формирование слоев или групп сигарет и сушка пачек сигарет, наиболее успешно выполняются в шаговом режиме, что, таким образом, означает, что передачу сигарет или пачек от ячейки, занимающей заданную позицию, более конкретно, на плите выпускной станции питателя или в виде остановленной ячейки на транспортере шагового действия в подвижную ячейку, более конкретно, ячейку постоянно движущегося транспортера.
Эта проблема решена Европейским патентом 210544, который относится к цепному передающему транспортеру, содержащему последовательность ячеек, равномерно распределенных вдоль цепи, которая, посредством компенсационной системы подвижных шкивов, имеет постоянно движущуюся ветвь и ветвь, движущуюся в шаговом режиме, позволяющую передавать группы сигарет от выпускных позиций питателя на постоянно движущийся транспортер. Группы сигарет передают от выпускных позиций питателя в стационарные ячейки на движущейся в шаговом режиме ветви и из ячеек на постоянно движущейся ветви на постоянно движущийся транспортер. Ячейки на транспортере должны быть остановлены на достаточно продолжительное время, чтобы дать возможность отобрать сигареты из питателя и ввести их в ячейки, причем эти операции, хотя их выполняют на высокой скорости, требуют использования толкателя периодического действия, рабочая скорость которого ограничена не только по причинам, диктуемым механикой, но также из-за необходимости предотвращения воздействия на сигареты ускорений, превышающих заданные пределы.
Способ, раскрытый в выше упомянутом патенте, не позволяет получить удовлетворительное решение, так как он основан на принципе останова одной ветви передающего транспортера на такой промежуток времени, который необходим для передачи групп сигарет от выпускных позиций питателя к соответствующим ячейкам. В результате максимальная скорость передающего транспортера не отличается от скорости обычного транспортера шагового действия, и это ограничение неизбежно также влияет на постоянно движущиеся транспортеры, связанные с ним.
Техническим результатом настоящего изобретения является создание способа и устройства передачи изделий от ячейки, занимающей заданное положение, к подвижной ячейке, которые позволяют исключить указанные выше недостатки и при этом обеспечивают плавную, точную передачу изделий.
Этот технический результат достигается тем, что в способе передачи изделий от первой ячейки ко второй ячейке, причем первая ячейка расположена в заданном положении и выполнена таким образом, чтобы определять по крайней мере одно направление подачи/выпуска изделий, а вторую ячейку перемещают вдоль заданной первой траектории, при этом подают по крайней мере один захватывающий элемент, предназначенный для захвата изделий, вдоль второй траектории, расположенной между первой ячейкой и первой траекторией в существенной степени по касательной по отношению к первой траектории, и передают изделия от второй ячейки к захватывающему элементу, когда захватывающий элемент подают вдоль первой части второй траектории, согласно изобретению изделия передают от первой ячейки к захватывающему элементу, когда захватывающий элемент подают вдоль в существенной степени прямолинейной второй части второй траектории, параллельной направлению подачи/выпуска изделий по отношению к первой ячейке.
Вышеуказанный технический результат достигается также и тем, что в устройстве для передачи изделий, содержащем первую ячейку и вторую ячейку, причем первая ячейка расположена в заданном положении и выполнена так, чтобы определять по крайней мере одно направление перемещения подачи/выпуска изделий относительно первой ячейки, а вторая ячейка выполнена с возможностью перемещения вдоль заданной первой траектории, захватывающее приспособление, содержащее захватывающий элемент для захвата изделий и перемещения вдоль второй траектории, содержащей первую часть, направленную по касательной к первой траектории, и вторую часть, расположенную около первой ячейки, и приводные средства для подачи захватывающего элемента вдоль первой части траектории и для удерживания захватывающего элемента в направлении, параллельном второй ячейке, и для перемещения синхронно со второй ячейкой, когда захватывающий элемент перемещают вдоль первой части траектории для передачи изделий от второй ячейки к захватывающему элементу, согласно изобретению вторая часть второй траектории является в существенной степени прямолинейной частью, направленной параллельно упомянутому направлению перемещения.
Неограничивающий вариант исполнения настоящего изобретения будет описан со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает вид в перспективе, на котором отдельные части удалены для ясности изображения, первого предпочтительного варианта исполнения устройства для передачи изделий, выполненного в соответствии с настоящим изобретением;
фиг.2 - вид в перспективе детали устройства, показанного на фиг.1;
фиг.3 - вид сверху, на котором отдельные части удалены для ясности изображения, устройства, показанного на фиг.1;
фиг.4 - схематический вид механизма устройства, показанного на фиг.1;
фиг.5 - вид сбоку устройства, показанного на фиг.1;
фиг.6 - вид в перспективе, на котором отдельные части удалены для ясности изображения, второго предпочтительного варианта исполнения устройства, выполненного в соответствии с настоящим изобретением;
фиг.7 - вид в перспективе, на котором отдельные части удалены для ясности изображения, варианта устройства, показанного на фиг.1;
фиг.8 - сечение в вертикальной плоскости узла, показанного на фиг.7;
фиг.9 - вид в перспективе устройства, соединенного с устройством, показанным на фиг.1;
фиг.10 - вид спереди, частично в разрезе, узлов, показанных на фиг.9.
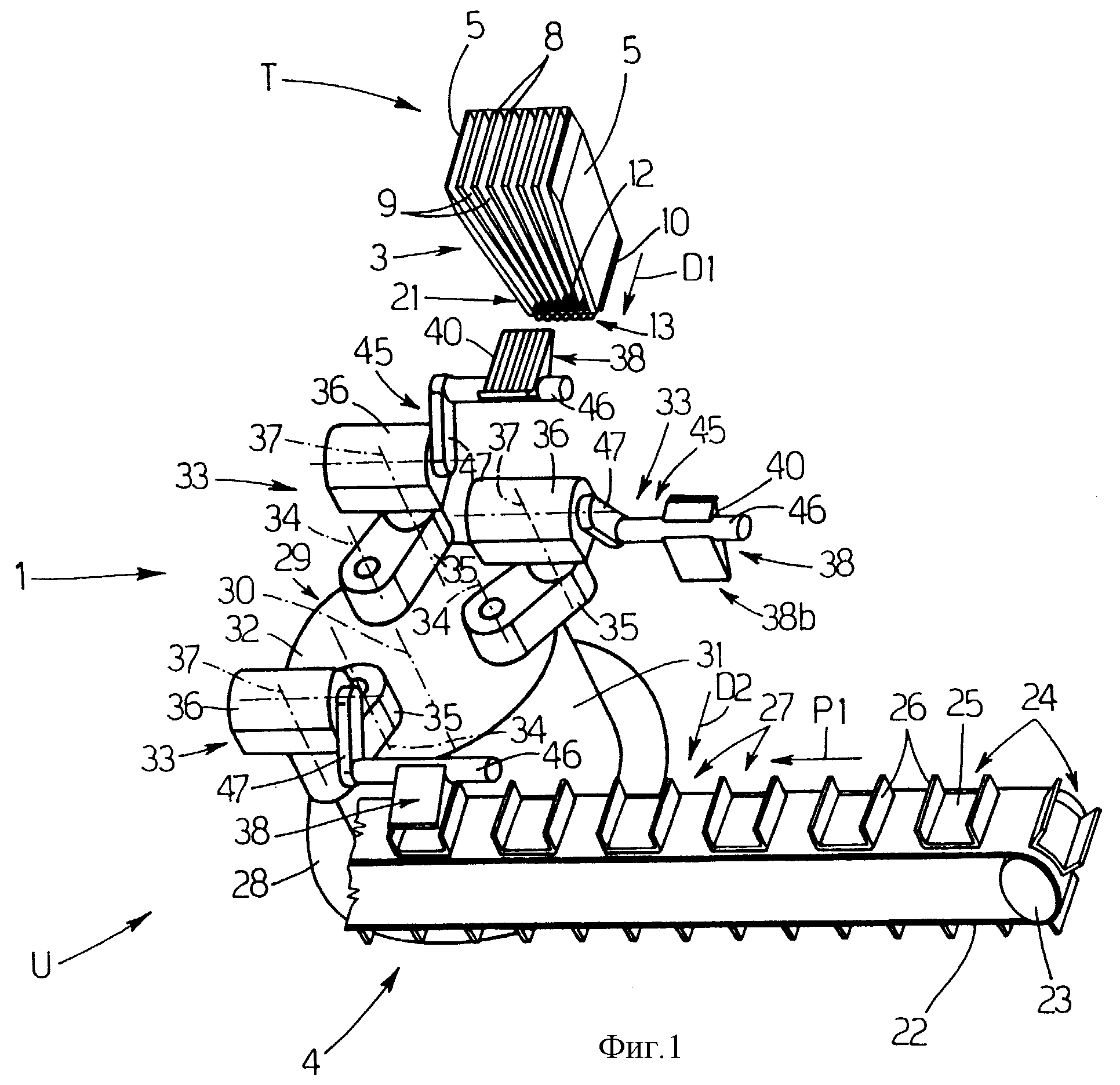
На фиг.1 и 5 показано захватывающее приспособление 1 для передачи сигарет 2 от входного питателя Т, имеющего по крайней мере один выпуск 3, к постоянно движущемуся выпускному транспортеру 4. Питатель Т, захватывающие приспособления 1 и выпускной транспортер 4 вместе составляют передающее устройство U для передачи сигарет 2.
Выпуск 3 содержит две боковые стенки 5, причем передняя стенка 6 обращена к приспособлению 1, задняя стенка 7 параллельна стенке 6, расположенной с противоположной стороны, шесть разделительных стенок 8 расположены перпендикулярно к стенкам 6 и 7, которые вместе со стенками 5 образуют семь в существенной степени вертикальных каналов 9, и в существенной степени горизонтальную плиту 10, расположенную между нижними краями стенок 5. Каналы 9 содержат соответствующие колонки 11 сигарет 2, плита 10 образует поверхность 12, служащую опорой для нижней сигареты 2 в каждой колонке 11, и сигареты 2, лежащие непосредственно на плите 10, образуют слой 13 сигарет, который передают приспособлением 1 от выпуска 3 на транспортер 4. Выпуск 3 также содержит отверстие 14, расположенное между нижним краем стенки 6 и плитой 10 и имеющее часть 15, находящуюся в одной плоскости со стенкой 6, и часть 16, находящуюся в одной плоскости с плитой 10, и заднее отверстие 17, расположенное между нижним краем стенки 7 и плитой 10.
Выпуск 3 соединен с толкателем 18, который расположен против отверстия 17 и содержит шток 19, сочлененный с определенным количеством пальцев 20, равным количеству каналов 9, и который перемещают вперед и назад между позицией выстоя, в которой пальцы 20 находятся за пределами выпуска 3, и рабочей позицией, в которой пальцы 20 расположены в отверстии 17 внутри соответствующего канала 9 и непосредственно поверх плиты 10 так, чтобы выталкивать слой 13 через отверстие 14 с опорной поверхности 12 плиты 10.
Опорная поверхность 12 плиты 10, нижние края стенок 5 и разделительных стенок 8 и отверстия 14 и 17, таким образом, образуют ячейку 21 для последовательного приема слоев 13, которые выталкивают через отверстие 14 с помощью скользящего вдоль поверхности 12 в направлении D1, параллельном поверхности 12, стенкам 5 и разделительным стенкам 8. Форма ячейки 21, таким образом, определяет ориентацию направления выпуска D1 сигарет из ячейки 21.
Транспортер 4 содержит ленту 22, огибающую два шкива 23 (только один показан на фиг.1), и ряд гнезд 24, равно отстоящих друг от друга вдоль ленты 22 и постоянно перемещаемых вдоль прямолинейной траектории Р1. Каждое гнездо 24 содержит нижнюю стенку 25 и две параллельных стенки 26, направленных перпендикулярно к нижней стенке 25, которые образуют ячейку 27 для приема слоев 13. Образованная только тремя стенками 25, 26 каждая ячейка 27 имеет определенное количество входных направлений, по которым можно подавать слои 13 в ячейку 27, причем одно из этих входных направлений, параллельное стенкам 25, 26 гнезда 24, обозначено как D2 на фиг.1.
Захватывающее приспособление 1 содержит платформу 28, на которой установлен барабан 29, который вращают относительно платформы 28 вокруг оси 30, перпендикулярной к поверхности 12. Барабан 29 содержит цилиндрическую обечайку 31 и круглую стенку 32, причем и обечайка и стенка соосны с осью 30, а на стенке 32 размещено три шарнирных рычага 33, вращаемых относительно соответствующих осей 34, параллельных оси 30 и равно удаленных от нее. Каждый шарнирный рычаг 33 содержит кривошип 35, вращаемый относительно соответствующей оси 34, головку 36, установленную на свободном конце кривошипа 35 с возможностью вращения относительно кривошипа 35 вокруг оси 37, параллельной оси 30, и захватывающий элемент 38 для приема слоев 13, который соединен с возможностью вращения с головкой 36 относительно головки 36 вокруг оси 39, перпендикулярной оси 30.
Захватывающий элемент 38 (фиг.4) перемещается по траектории Р2, расположенной между ячейкой 21 и траекторией Р1 и направленной по касательной к траектории Р1 в заданной точке Р, и он содержит плиту 40, имеющую, как показано на фиг.2, поверхность 41, на которой сформировано определенное количество параллельных удлиненных ячеек 42 для размещения соответствующих сигарет 2 слоя 13. Каждая ячейка 42 снабжена определенным количеством отверстий 43 для отсоса воздуха, расположенных вдоль продольной оси 42а ячейки 42, для удерживания соответствующей сигареты 2 в ячейке 42, и отделено от соседней ячейки 42 рифлей 44. Захватывающий элемент 38 также имеет край 38b, обращенный к станции подачи/выпуска сигарет 2, которые, через край 38b скользят вдоль ячеек 42 в направлении их осей 42а.
Захватывающий элемент 38 соединен с головкой 36 прямоугольным кривошипом 45, который содержит часть 46, выполненную за одно целое с плитой 40 и расположенную параллельно оси 39, и часть 47, перпендикулярную части 46, свободный конец которой соединен с головкой 36 с возможностью вращения относительно головки 36 вокруг оси 39.
Устройство работает следующим образом.
Сигареты 2 помещают в выпуске 3 в колонках 11 в соответствующих каналах 9, причем нижняя сигарета 2 каждой колонки 11 лежит на плите 10. Толкатель 18 перемещают вперед - назад циклически между позицией выстоя и рабочей позицией так, чтобы выталкивать из ячейки 21 в каждом цикле слой 13 сигарет 2, лежащих на плите 10, и в каждом цикле колонки 11 продвигаются вперед на один шаг, равный диаметру сигареты 2, чтобы уложить следующий слой 13 на плиту 10. В то же самое время ячейки 27 транспортера 4 перемещают постоянно и равномерно вдоль траектории Р1.
Для передачи сигарет 2 из ячейки 21 в ячейку 27 барабан 29 поворачивает шарнирные рычаги 33 по часовой стрелке (фиг.1, 3, 4) вокруг оси 30, в то время как с помощью известного механизма (на чертеже не показан), расположенного в барабане 29 и предназначенного для ориентации кривошипов 35 относительно осей 34 в соответствии с законом движения ЗД1, который является функцией углового положения соответствующей оси 34 относительно оси 30 и который предназначен для позиционирования осей 37 вдоль траектории Р3. Траектория Р3 лежит в заданной плоскости А и содержит замкнутую криволинейную часть 48 и прямолинейную возвратно-поступательную часть 49, соединенную одним концом с частью 48. Головки 36 перемещают вдоль траектории РЗ и удерживают в положении, при котором они остаются параллельными самим себе, с помощью известного эпициклического механизма (на чертеже не показан), в то время как другой механизм, предпочтительно известный кулачковый механизм (на чертеже не показан), расположенный в головках 36, кривошипах 35 и барабане 29, предназначенный для вращения соответствующих элементов 38 по часовой стрелке (фиг.5) относительно соответствующей оси 39 в соответствии с законом движения ЗД2, являющимся функцией углового положения соответствующей оси 34 относительно оси 30, и который предназначен для позиционирования рельефной поверхности 41 плиты 40 каждого захватывающего элемента 38 преимущественно в одной плоскости с опорной поверхностью 12 плиты 10 в плоскости В по мере перемещения головки 36 вдоль прямолинейной части 49 траектории в направлении к выпуску 3. Когда захватывающий элемент 38 перемещают вдоль траектории Р2 вдоль прямолинейной части 50 траектории, совпадающей с направлением D1 и лежащей в плоскости В, толкатель 18 таким образом перемещают вперед, чтобы вытолкнуть слой 13 сигарет в направлении ячеек 42 захватывающего элемента 38. При достижении конца прямолинейной части 50 траектории захватывающий элемент 38 в существенной степени образует продолжение плиты 10 и занимает нижнюю часть 16 отверстия 14, и толкателем 18 подают сигареты 2 слоя 13 в соответствующие ячейки 42 захватывающего элемента 38. Когда задействуют сопла 43 для отсоса воздуха, расположенные вдоль ячеек 42, захватывающий элемент 38 отводят от плиты 10 с помощью соответствующей головки 36, которую перемещают назад вдоль прямолинейной части 49 траектории Р3 и с помощью элемента 38 одновременно поворачивают относительно соответствующей оси 39, чтобы опустить поверхность 41 относительно плоскости В.
Захватывающий элемент 38 затем перемещают вместе с соответствующим слоем 13 сигарет вдоль части 51 траектории, вдоль которой (захватывающий элемент переносят от выпуска 3 к транспортеру 4, поворачивая относительно оси 30 с помощью барабана 29) его удерживают в положении, параллельном самому себе, поворачивая в одинаковой степени в противоположных направлениях относительно соответствующих осей 34 и 37 с помощью известных механизмов (на чертеже не показаны), и поворачивают на 180° относительно положения при перемещении вдоль части 50 траектории, поворачивая относительно оси 39.
Захватывающий элемент 38 затем перемещают вдоль криволинейной части 52 траектории передачи, касательной к траектории Р1 в точке Р, поворачивая, как уже указывалось, относительно оси 30, и поддерживают в положении, параллельном самому себе, как уже указывалось, поворачивая в одинаковой степени в противоположных направлениях относительно соответствующих осей 34 и 37 так, что соответствующая рельефная поверхность 41 располагается параллельно нижней стенке 25 ячейки 27. При перемещении вдоль части 52 траектории каждый захватывающий элемент 38 синхронизируют с соответствующей ячейкой 27 с помощью составляющей скорости движения элемента 38 в направлении, параллельном траектории Р1, поддерживаемой равной скорости движения соответствующей ячейки 27.
При движении вдоль части 52 траектории захватывающий элемент 38 перемещают в направлении к траектории Р1 и разгружают в соответствующую ячейку 27 до момента, когда ячейка достигает точки Р, и за это время поверхность 41 располагают так, чтобы она была обращена к нижней стенке 25 ячейки 27 и была параллельна ей. В этой точке сопла 43 для отсоса воздуха отключают известным способом (на чертеже не показано), чтобы освободить слой 13, который удерживают известными позиционирующими средствами (на чертеже не показаны), сопряженными с ячейкой 27, и захватывающий элемент 38 затем постепенно отводят от ячейки 27.
Часть 52 траектории передачи и прямолинейная часть 50 траектории Р2 соединены криволинейной частью 53, вдоль которой перемещают захватывающий элемент 38, поворачивая относительно оси 30 по направлению к выпуску 3, и удерживают в положении, параллельном самому себе, поворачивая в одинаковой степени в противоположных направлениях относительно соответствующих осей 34 и 37, и поворачивают на 180° относительно оси 39, чтобы установить рельефную поверхность 41 так, чтобы она в существенной степени совмещалась с плоскостью В, для приема следующего слоя 13 сигарет.
На фиг.6 изображен другой вариант устройства, содержащего захватывающие приспособления 54 для передачи слоев 13 сигарет от девяти выпусков 3 входного питателя Т передающего устройства U на транспортер 4 для формирования групп 55 сигарет, каждая из которых содержит три наложенных друг на друга слоя 13а, 13b, 13с сигарет. Выпуски 3 равно удалены друг от друга с шагом Рх в направлении, параллельном траектории Р1 движения транспортера 4, и разбиты на три группы 56, 57, 58 по три выпуска 3 в каждой. Группа 56 содержит три расположенных рядом выпуска 3а, каждый из которых содержит семь каналов 9, имеет соответствующую плиту 10, расположенную в плоскости передачи В1, и образует соответствующую ячейку 21а. Группа 57 содержит три расположенных рядом выпуска 3b, каждый из которых содержит шесть каналов 9, имеет соответствующую плиту 10, расположенную в плоскости передачи В2, параллельной и расположенной ниже плоскости В1, и образует соответствующую ячейку 21b. Группа 58 содержит три расположенных рядом выпуска 3с, каждый из которых содержит семь каналов 9, имеет соответствующую плиту 10, расположенную в плоскости передачи В3, параллельной и расположенной ниже плоскости В2, и образует соответствующую ячейку 21с.
Захватывающее приспособление 54 содержит платформу 59, оснащенную барабаном 60, который вращают относительно платформы 59 вокруг оси 61, перпендикулярной плоскости ВЗ и расположенной ниже плоскости В3. Приспособление 54 также содержит платформу 62, оснащенную барабаном 63, который вращают относительно платформы 62 вокруг оси 64, параллельной оси 61 и расположенной над плоскостью В1. Компоненты барабанов 60 и 63 будучи одинаковыми между собой и с барабаном 29, обозначены теми же позициями, что и соответствующие части барабана 29.
Барабаны 60 и 63 вращают относительно соответствующих осей 61 и 64 с одинаковой скоростью и в одном и том же направлении (по часовой стрелке на фиг.6) так, что в каждый момент времени угловое положение относительно оси 61 каждой головки 36 на барабане 60 такое же, как и угловое положение относительно оси 64 каждой головки 36 на барабане 63. Два кривошипа 45 каждой пары соответствующих головок 36 содержат общие части 46 и две общие части 46 образуют штангу 65, вдоль которой равномерно размещено с шагом Рх девять захватывающих элементов 38, имеющих соответствующие плиты 40, соединенные со штангой 65 соответствующими кронштейнами 66. Захватывающие элементы 38 разбиты на три группы 67, 68, 69, каждая из которых содержит по три элемента 38. Группа 67 содержит три элемента 38а, поверхности 41 которых расположены в одной плоскости, и они взаимодействуют с ячейками 21а в плоскости В1. Группа 68 содержит три элемента 38b, поверхности 41 которых расположены в одной плоскости, и они взаимодействуют с ячейками 21b в плоскости В2. Группа 69 содержит три элемента 38с, поверхности 41 которых расположены в одной плоскости, и они взаимодействуют с ячейками 21с в плоскости В3. Элементы 38а, 38b, 38с содержат соответствующие плиты 40, предназначенные для приема соответствующих слоев 13а, 13b, 13с, соответственно содержащих семь, шесть и семь сигарет 2.
Приспособление 54 действует следующим образом: захватывающие элементы 38а, 38b, 38с располагают около соответствующих ячеек 21а, 21b, 21с и одновременно захватывают девять слоев 13а, 13b, 13с в ячейках 21а, 21b, 21с, как описано со ссылкой на первый вариант исполнения, и перемещают захватывающие элементы 38а, 38b, 38с и соответствующие группы 67, 68, 69 вдоль соответствующих траекторий (на чертеже не показаны) в существенной степени одинаково к траектории Р2 и в существенной степени по касательной к траектории Р1 около соответствующих точек Ра, Рb, Рс для передачи каждого слоя 13а, 13b, 13с в соответствующую ячейку 27.
Ячейки 27 перемещают на расстояние, равное трем шагам Ps в интервале между проходом следующих друг за другом захватывающих элементов 38а, 38b, 38с через точки касания Ра, Рb, Рс так, чтобы три пустые ячейки 27 были расположены соответственно трем захватывающим элементам 38а для приема трех слоев 13а, причем три ячейки 27, содержащие соответствующие слои 13а сигарет, располагают соответственно расположению захватывающих элементов 38b для приема трех слоев 13b поверх слоев 13а, а три ячейки 27, содержащие слои 13а и 13b, располагают соответственно расположению элементов 38с для приема соответствующих слоев 13с поверх слоев 13b и таким образом одновременно завершают комплектование трех групп 55 сигарет.
Помимо расположения захватывающих элементов 38а, 38b, 38с для приема сигарет 2 около соответствующих ячеек 21а, 21b, 21с и высвобождения сигарет 2 около ячеек 27 транспортера 4 поворот штанг 65 относительно осей 39 также предназначен для предотвращения столкновений между тремя штангами 65, соединяющими рычаги 35 соответствующих барабанов 60 и 63.
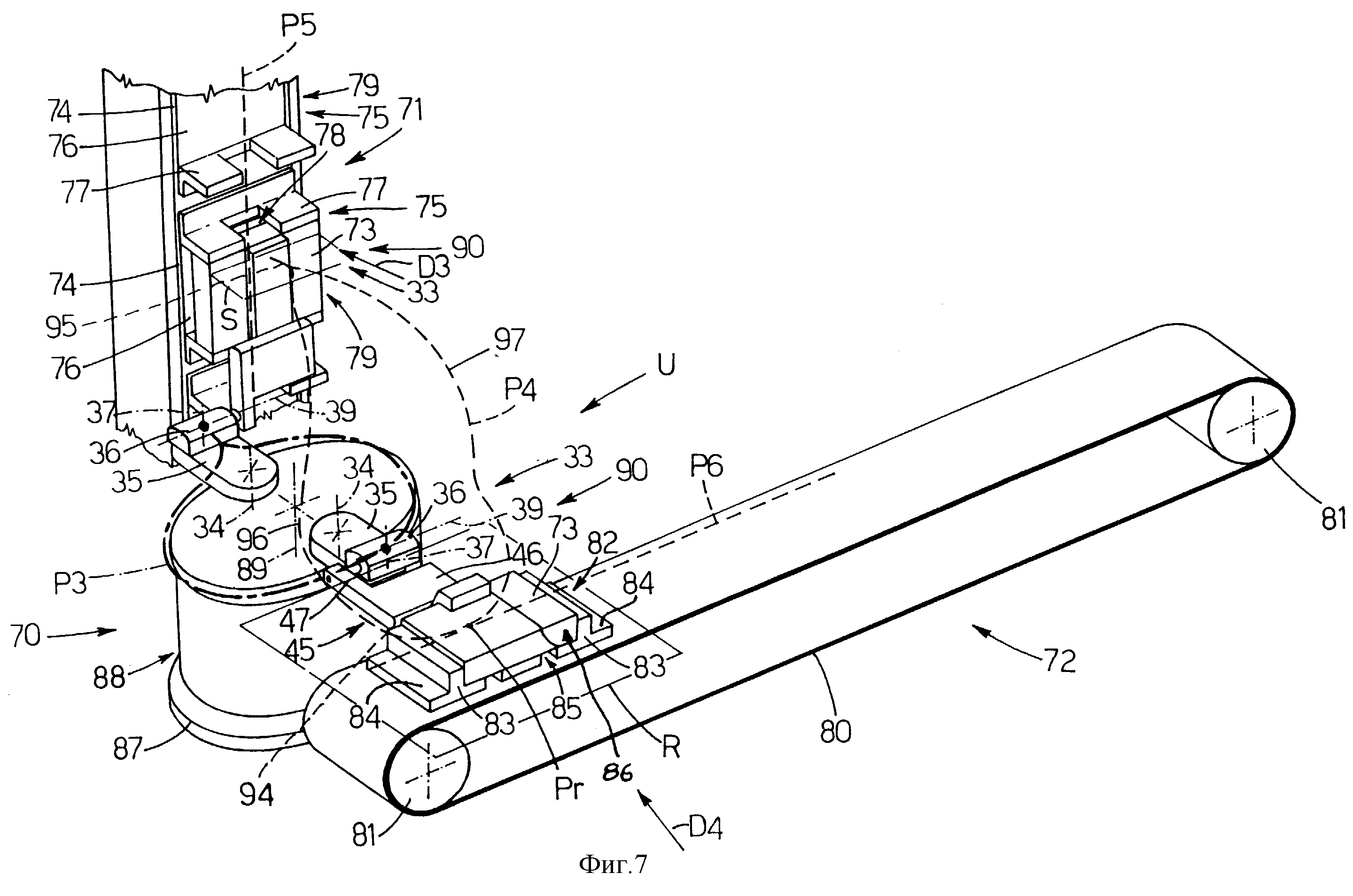
На фиг.7 показан вариант исполнения устройства U для передачи изделий, содержащего захватывающее приспособление 70, расположенное между транспортером 71 шагового действия и постоянно движущимся транспортером 72 для передачи пачек 73 сигарет с транспортера 72 на транспортер 71.
Транспортер 71 содержит ленту 74, огибающую два шкива известной конструкции (на чертеже не показаны), и ряд гнезд 75, распределенных равномерно вдоль транспортера 74. Каждое гнездо 75 содержит заднюю стенку 76 и две боковых стенки 77, каждая из которых содержит центральный паз 78. Стенки 76 и 77 гнезда 75, таким образом, образуют ячейку 79 для соответствующей пачки 73, которую можно подать в ячейку 79 по ряду входных направлений через отверстия в гнезде 75, причем одно из входных направлений D3 перпендикулярно к задней стенке 76 гнезда 75.
Транспортер 72 содержит ленту 80, огибающую два шкива 81 и ряд гнезд 82 (только одно показано на фиг.7), расположенных вдоль полотна 80. Каждое гнездо 82 содержит две боковые стенки 83 и нижнюю стенку 84, в которой имеется сквозное отверстие 85. Стенки 83 и 84 гнезда 82 таким образом образуют ячейку 86 для приема пачки 73, которую можно взять из ячейки 86 по ряду выпускных направлений через отверстия в гнезде 82, причем из этих выпускных направлений на фиг.7 обозначено выпускное направление D4, параллельное боковым стенкам 83 и нижней стенке 84 ячейки 86.
Захватывающее приспособление 70 содержит платформу 87 и барабан 88, который вращают (по часовой стрелке на фиг.7 и относительно платформы 87) вокруг соответствующей оси 89. Компоненты барабана 88 будучи сходными с барабаном 29, обозначены теми же позициями, что и соответствующие части барабана 29, где захватывающие элементы 38 заменены захватывающими элементами 90.
На фиг.7 барабан 88 оснащен двумя шарнирными рычагами 33, несущими соответствующие захватывающие элементы 90, подвижные в направлении траектории Р4, один захватывающий элемент 90 показан внутри ячейки 86 в процессе захвата соответствующей пачки 73, а другой показан внутри ячейки 79 в процессе высвобождения соответствующей пачки 73.
Каждый захватывающий элемент 90 содержит фиксированную губку 91 и подвижную губку 92, поворотную относительно оси 93, параллельной оси 39, и подвижную относительно фиксированной губки 91 между закрытым положением, которое показано сплошными линиями на фиг.8, и открытым положением, показанным пунктирными линиями на фиг.8. Захватывающий элемент 90 также содержит край 90h для подачи и выпуска пачек 73.
Транспортер 71 перемещают в шаговом режиме, причем каждый шаг равен шагу между ячейками 79, для расположения свободной ячейки 79, как показано на фиг.7, при каждом шаге, и для перемещения ячеек вдоль траектории Р5, при этом транспортер 72 перемещают постоянно для подачи пачек 73 последовательно вдоль траектории Р6 к захватывающему приспособлению.
Приспособление 70 предназначено для захвата пачек 73 из ячеек 86 на транспортере 72 и передачи пачек 73 одну за одной в соответствующие ячейки 79. Барабан 88 вращают по часовой стрелке на фиг.7 и кривошипы 35 ориентируют в соответствии с законом движения ЗД1, являющимся функцией углового положения оси 34 относительно оси 89, для расположения соответствующих головок 36 вдоль траектории Р3. Каждый захватывающий элемент 90 поворачивают относительно соответствующей оси 39 и относительно соответствующей головки 36 согласно заданному закону движения ЗД3, который является функцией углового положения соответствующей оси 34 относительно оси 89 и который предназначен для циклического поворота захватывающего элемента 90 на 90°, и вместе с движениями рычагов 33, описанными выше, также для подачи захватывающего элемента 90 вдоль траектории Р4. Траектория Р4 (фиг.7) содержит криволинейную часть 94 траектории передачи, лежащую в заданной плоскости R и касательную к траектории Р6 в точке Рr, прямолинейную часть 95 траектории передачи, лежащую в плоскости S, параллельной плоскости R, и две криволинейные части 96, 97, соединяющие части 94 и 95 на противоположных сторонах.
При движении вдоль части 94 траектории захватывающего элемента 90 губки 91 и 92 располагают против соответствующей ячейки 86 и перемещают вдоль части 94 траектории с составляющей скорости, параллельной траектории Р6, равной скорости перемещения ячейки 86. При движении вдоль части 94 траектории захватывающий элемент 90 с помощью известных побудителей (на чертеже не показаны) удерживает подвижную губку 92 в открытом положении и постепенно вводит фиксированную губку 91 внутрь через отверстие 85 под пачку 73 вплоть до точки касания Рr.
Когда очередной захватывающий элемент 90 достигает точки касания Рr, известные побудители (на чертеже не показаны) переводят подвижную губку 92 в закрытое положение, чтобы захватить пачку 73 в ячейке 86. Пачку 73 затем постепенно вынимают из ячейки 86 в направлении D4 с помощью захватывающего элемента 90, который посредством перемещения соответствующего рычага 33, описанного со ссылкой на предыдущий вариант исполнения, удерживают около ячейки 86 и в одинаково сориентированном положении относительно нее.
При перемещении вдоль части 96 траектории захватывающий элемент 90 вместе с пачкой 73 поворачивают на 90° относительно оси 39 и располагают вместе с пачкой 73 в плоскости S, содержащей прямолинейную часть 95 траектории, ориентированную в направлении D3. Захватывающий элемент 90 вместе с пачкой 73 затем подают в направлении D3 вдоль части 95 траектории по направлению к задней стенке 76 ячейки 75 для постепенного введения пачки 73 в ячейку 79. В то же время подвижная губка 92 (которая в закрытом положении входит в сопряжение с пазом 78 в нижней боковой стенке 77 ячейки 79) открыта для высвобождения пачки 73. Как только пачка 73 уложена, захватывающий элемент 90 выводят из задней стенки 76, перемещая вдоль части 95 траектории, чтобы вывести из сопряжения подвижную стенку 92 с ячейкой 79 и таким образом не влиять на высвобожденную пачку 73. При перемещении вдоль части 97 траектории Р4 захватывающий элемент поворачивают на 90° и располагают в плоскости R синхронно с ячейкой 86 на постоянно перемещаемом транспортере 72, чтобы захватить следующую пачку 73.
В следующем варианте исполнения, который не показан на чертеже, транспортер 71 шагового действия содержит равномерную последовательность ячеек, каждая из которых может вмещать шесть уложенных подряд пачек 73, и захватывающее приспособление содержит два барабана, каждый из которых снабжен двумя шарнирными рычагами, соединенными с рычагами на противоположном барабане с помощью штанг, оснащенных шестью захватывающими элементами такого же типа, который был описан в предыдущем варианте исполнения, чтобы одновременно передавать шесть пачек сигарет с постоянно перемещаемого транспортера 72 на транспортер 71 шагового действия.
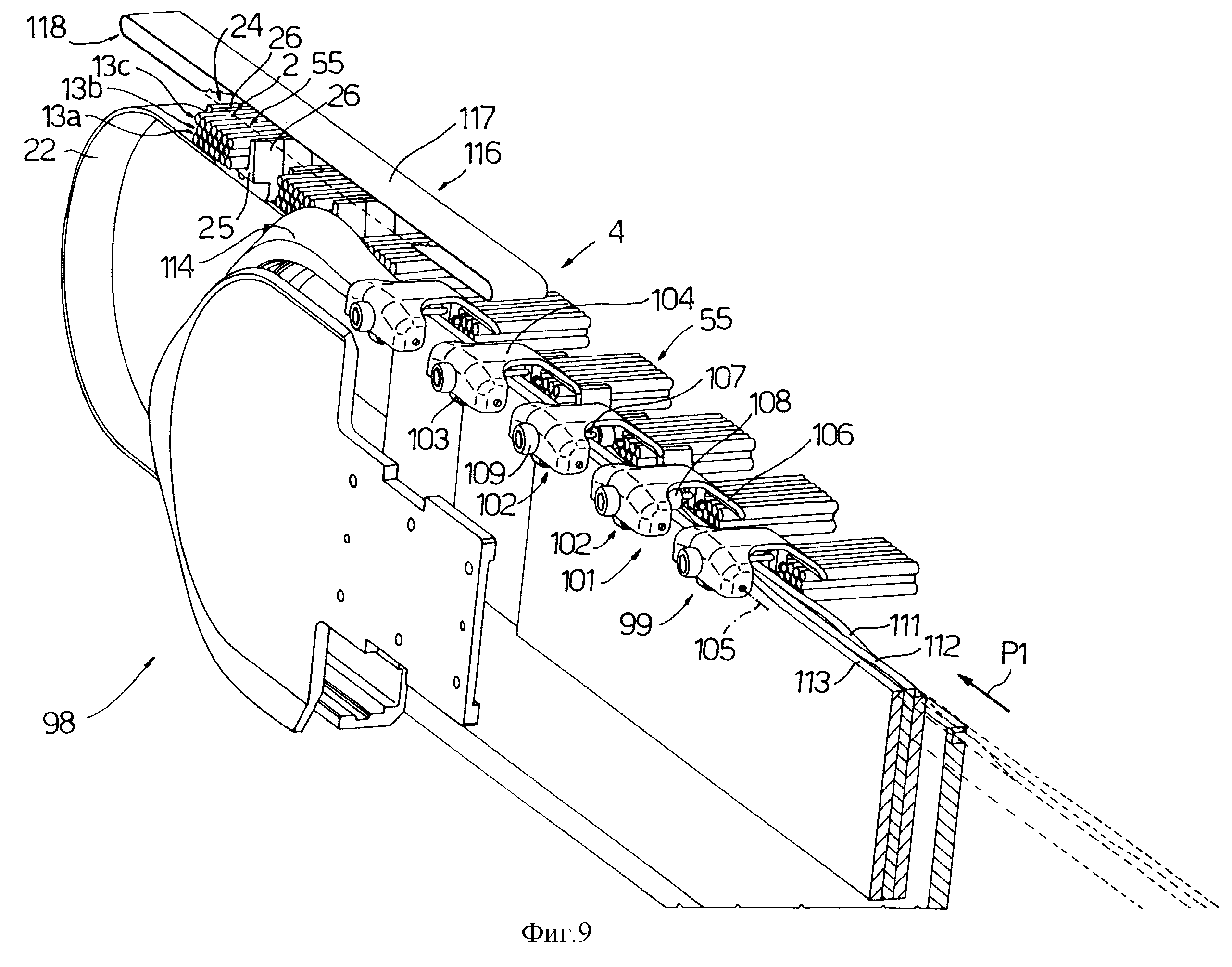
На фиг.9 и 10 показано приспособление 98 для удерживания сигарет в гнездах 24 транспортера 4, которое содержит транспортер 99, в свою очередь содержащий бесконечную ленту 100 (не показана на фиг.9) и ветвь 101, параллельную траектории Р1 в зоне, в которой слои 13а, 13b и 13с передают в гнезда 24.
Транспортер 99 содержит несколько удерживающих элементов 102, расположенных вдоль ленты 100 с шагом Рх, т.е. с шагом расположения гнезд 24 и элементов 38.
Каждый удерживающий элемент 102 содержит каретку 103, которую перемещают лентой 100 и которая сопряжена с известными направляющими (на чертеже не показаны), и прижим 104, подвижный относительно каретки 103 и соединенный с кареткой 103 осью 105, перпендикулярной к плоскости чертежа на фиг.10. Каждый прижим 104 имеет арочную форму и содержит краевой палец 106 для выборочного взаимодействия с ячейкой 27 гнезда 24, и несет вал 107, расположенный перпендикулярно оси 105. Вал 107 несет ролик 108, расположенный между пальцем 106 и осью 105, и консольный ролик 109, расположенный на оси 105. Таким образом, ролики 108 и 109 расположены по разные стороны от оси 105. Каждый удерживающий элемент 102 также содержит пружину 110, соединенную с кареткой 103 и с прижимом 104, и создает закрывающее усилие между прижимом 104 и кареткой так, чтобы палец 106 прижимался к нижней стенке 25 соответствующего гнезда.
Транспортер 99 содержит три установленных рядом кулачка 111, 112, 113, расположенные параллельно траектории Р1 в зоне, в которой слои 13а, 13b, 13с передают в гнезда 24, взаимодействующие с роликами 108 и предназначенные для подъема прижимов 104. В зоне, где лента 100 огибает шкив известной конструкции (на чертеже не показан), кулачки 111, 112, 113 соединены в виде одного кулачкового профиля 114. Транспортер 99 также содержит горку 115, которая взаимодействует с роликом 109.
Приспособление 98 также содержит транспортер 116, который, в свою очередь, содержит бесконечную ленту 117, нижняя ветвь 118 которой параллельна траектории Р1 и расположена над ней, чтобы удерживать укомплектованные группы 55.
Приспособление 98 действует следующим образом: транспортер с удерживающими элементами 102 перемещают вперед синхронно с соответствующими гнездами 24 транспортера 4 так, чтобы в зоне, в которой слои 13а, 13b, 13с передают, каждое гнездо 24 было обращено и спарено с соответствующим удерживающим элементом 102. Соответствующие ролики 108 трех последовательно расположенных и смежных удерживающих элементов 102 смещены (как показано на фиг.10, где ролики 108 двух последовательно расположенных элементов изображены пунктирными линиями) так, что каждый ролик 108 сопрягается с кулачками 111, 112, 113, отличным от кулачков 111, 112, 113, с которым сопряжены другие ролики 108. Это в сочетании с заданными профилями кулачков 111, 112, 113 предназначено для одновременного подъема трех последовательно расположенных и смежных прижимов 104 на одинаковую величину и таким образом обеспечивает возможность ввода элемента 38 и соответствующего слоя 13а, 13b, 13с в гнездо 24. Когда слой 13а, 13b, 13с введен в гнездо 24, прижимы 104 опускают с помощью пружины 110 и соответствующие пальцы 106 удерживают на заданном уровне с помощью горки 115, которая определяет уровень, соответствующий слою 13а, 13b, 13с, который был введен. Это означает, что так как точки Ра, Рb, Рс вдоль траектории Р1, в которых соответствующие слои 13а, 13b, 13с вводят, известны и предварительно определены, то горка 115 определяет различные уровни как функции положения элементов 102 вдоль траектории Р1.
Транспортер 116 предназначен для поддерживания групп 55 в соответствующих гнездах 24 путем расположения нижней ветви 118 над гнездами 24 и в контакте со слоем 13с группы 55 при движении вдоль части траектории Р1, в которой группы 55 укомплектованы и готовы для передачи на упаковочное колесо известной конструкции (на чертеже не показано).
На этой стадии пальцы 106 поднимают, чтобы высвободить группу 55 с помощью профиля 114, и элементы 102 подают назад вдоль возвратной ветви в зону передачи слоев 13а, 13b, 13с, чтобы повторить описанный выше цикл.
Реферат
Изобретение относится к способу и устройству передачи табачных изделий, например сигарет или пачек сигарет, между первой ячейкой, расположенной в заданном положении, и второй ячейкой, которую перемещают вдоль заданной первой траектории. При этом перемещают, по меньшей мере, один захватывающий элемент для захвата изделий вдоль второй траектории, расположенной между первой ячейкой и первой траекторией, по существу, по касательной к первой траектории, и передают изделия между захватывающим элементом и второй ячейкой при перемещении захватывающего элемента вдоль первой части второй траектории. Причем изделия передают между первой ячейкой и захватывающим элементом при перемещении захватывающего элемента вдоль прямолинейной второй части второй траектории, параллельной направлению подачи/выпуска изделий относительно первой ячейки. Изобретение позволяет осуществить плавную и точную передачу изделий от ячейки, занимающей заданное положение, к подвижной ячейке с большой скоростью. 2 с. и 19 з.п. ф-лы, 10 ил.
Комментарии