Способ погрузки сыпучих материалов в трюмы судна - RU2602519C1
Код документа: RU2602519C1
Чертежи
Описание
Изобретение относится к погрузочно-разгрузочным средствам, используемым в горной промышленности и производстве строительных материалов. Применяется при перегрузке сыпучих материалов, например песка, песчано-гравийной смеси или щебня, из пневмоколесного на водный транспорт.
Известно устройство для загрузки судов сыпучими материалами, включающее стрелу, установленную на портальном кране с возможностью подъема и опускания. Стрела несет ленточный транспортер, который загружается с помощью подающего ленточного конвейера и разгрузочного барабана, а разгружается через самотечную тележку [1].
Недостатками данного устройства являются высокие капитальные затраты, значительные эксплуатационные издержки за счет ведения дополнительных перевалочных операций и повышенная энергоемкость погрузочных работ.
Известно устройство для погрузки сыпучих грузов в трюмы судна [2], содержащее эстакаду с дорожным покрытием, размещенную вдоль причальной стенки на колоннах, загрузочный желоб, подвижно закрепленный на эстакаде, с возможностью перемещения вдоль эстакады по всей длине фронта погрузки.
Недостатками устройства являются значительные капитальные затраты, низкая производительность устройства, повышенная опасность ведения работ.
Наиболее близким по технической сущности является устройство для погрузки сыпучих грузов в трюм судна [3], содержащее эстакаду с дорожным покрытием, размещенную вдоль причальной стенки на колоннах, загрузочный желоб, подвижно закрепленный на тележке, с возможностью последовательного перемещения по рельсам под эстакадой вдоль фронта погрузки. С помощью данного устройства осуществляется прием на загрузочный желоб сыпучего материала с пневмоколесного транспорта, перемещение загрузочного желоба посредством кинематических связей с силовыми цилиндрами, обеспечивающими поворот загрузочного желоба в вертикальной плоскости и погрузку сыпучего материала в трюм судна, периодическое перемещение посредством привода тележки с загрузочным желобом по рельсам на всю длину фронта погрузки, равного суммарной длине трюмов судна.
Недостатками данного устройства являются высокие капитальные затраты, сложная система управления перемещением тележки вдоль фронта погрузки судна, низкая производительность устройства и повышенная опасность ведения работ.
Технический результат заключается в повышении производительности процесса погрузки сыпучих материалов за счет автоматизации управления процессом загрузки и перегрузки посредством двух желобов, повышении безопасности ведения работ, снижении капитальных затрат и повышении надежности.
Технический результат достигается тем, что в способе погрузки сыпучих материалов в трюмы судна, включающем прием на загрузочный желоб сыпучего материала с пневмоколесного транспорта, перемещение загрузочного желоба посредством кинематических связей с силовыми цилиндрами, обеспечивающими поворот загрузочного желоба в вертикальной плоскости и погрузку сыпучего материала в трюм судна, периодическое перемещение посредством привода тележки с загрузочным желобом по рельсам на всю длину фронта погрузки, равного суммарной длине трюмов судна, снабжением перемещающейся тележки дополнительным загрузочным желобом и кинематическими связями обоих загрузочных желобов с силовыми цилиндрами через Г-образные рычаги обеспечиваются одновременно протекающие процессы приема сыпучих материалов, их погрузка в трюм судна и периодическое перемещение тележки посредством привода, выполненного в виде автономной силовой установки, расположенной на тележке, при этом автоматически через блок управления обеспечивается синхронизация работы силовых цилиндров, установленных на тележке, и силовых цилиндров, установленных на загрузочных желобах, для исключения просыпки сыпучих материалов, при этом загрузочные желоба выполнены в виде емкости, равной вместимости пневмоколесного транспорта, с V-образным днищем.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Комплекс для осуществления способа погрузки сыпучих материалов в трюмы судна изображен на чертежах.
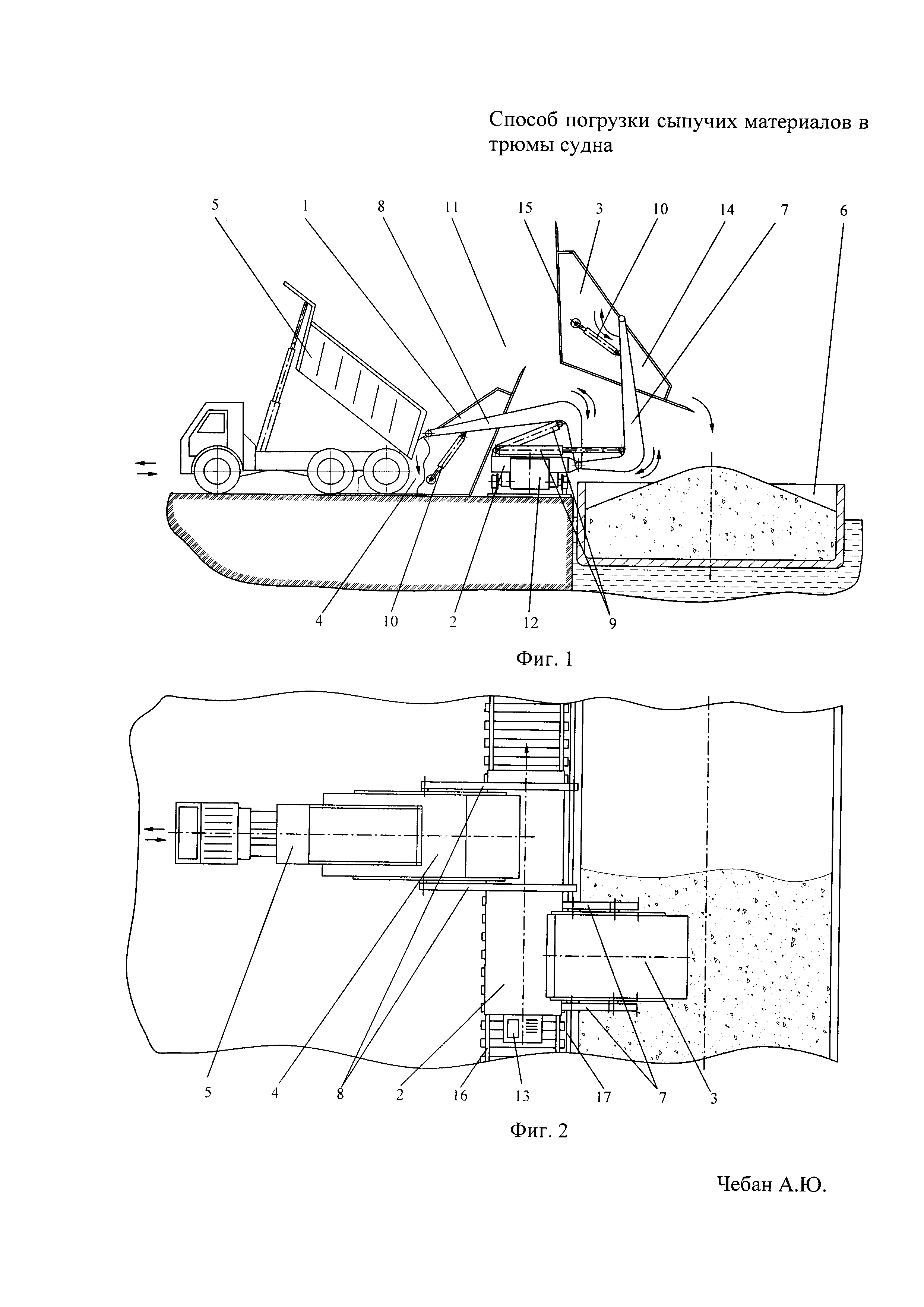
На фиг. 1 - общий вид комплекса в процессе приема на один из загрузочных желобов сыпучего материала с пневмоколесного транспорта и одновременного пересыпания с другого загрузочного желоба сыпучего материала в трюмы судна; на фиг. 2 - вид сверху на фиг. 1.
Комплекс 1 включает тележку 2, на которой установлены загрузочные желоба 3, 4 для приема и пересыпания сыпучего материала с пневмоколесного транспорта 5 в трюмы судна 6. Оба загрузочных желоба 3, 4 через кинематические связи с Г-образными рычагами 7, 8 связаны с силовыми цилиндрами 9, 10. Перемещение загрузочных желобов 3, 4 обеспечивает их поворот в вертикальной плоскости 11. Периодическое перемещение тележки 2 осуществляется посредством привода 12, выполненного в виде автономной силовой установки, расположенной на тележке 2. Блок управления 13 автоматически обеспечивает синхронизацию работы силовых цилиндров 9, 10 для исключения просыпания сыпучего материала. Загрузочные желоба 3, 4 выполнены в виде емкости 14, равной вместимости пневмоколесного транспорта 5, с V-образным днищем 15. Тележка 2 устанавливается на рельсы 16 на всю длину фронта погрузки 17.
Способ погрузки сыпучих материалов в трюмы судна реализуется следующим образом.
Осуществляется прием на один из загрузочных желобов 3 комплекса 1 сыпучего материала с пневмоколесного транспорта 5. Поскольку загрузочные желоба 3, 4 с V-образным днищем 15 выполнены в виде емкости 14, равной вместимости пневмоколесного транспорта 5, обеспечивается высокая производительность и безопасность ведения работ. Затем осуществляется поворот в вертикальной плоскости 11 загрузочного желоба 3 с помощью Г-образных рычагов 7 посредством кинематических связей с силовыми цилиндрами 9, 10 и погрузка сыпучего материала в трюм судна 6. Автоматически через блок управления 13 обеспечивается синхронизация работы силовых цилиндров 9, установленных на тележке 2, и силовых цилиндров 10, установленных на загрузочных желобах 3, 4 для выравнивания угла наклона V-образного днища 15, перемещаемого в пространстве для исключения просыпки сыпучих материалов. Снабжением перемещающейся тележки 2 дополнительным загрузочным желобом 4 и кинематическими связями обоих загрузочных желобов 3, 4 с силовыми цилиндрами 9, 10 через Г-образные рычаги 7, 8 обеспечиваются одновременно протекающие процессы приема сыпучих материалов, их погрузка в трюм судна 6 и периодическое перемещение тележки 2 посредством привода 12, выполненного в виде автономной силовой установки, расположенной на тележке 2, которая перемещается по рельсам 16 на всю длину фронта погрузки 17, равного суммарной длине трюмов судна 6.
Способ повышает производительность погрузки сыпучих материалов за счет автоматизации управления процессом загрузки и перегрузки посредством двух желобов, а также повышает безопасность ведения работ, снижает капитальные затраты и повышает надежность.
Источники информации
1. Патент РФ №2176215 от 16.02.1996. Устройство для загрузки судов сыпучими материалами.
2. Патент РФ №2329937 от 26.02.2007. Устройство для погрузки сыпучих грузов в трюмы судна.
3. Патент РФ №2268225от 22.07.2004. Устройство для погрузки сыпучих грузов в трюм судна.
Реферат
Изобретение относится к погрузочно-разгрузочным средствам, используемым в горной промышленности и производстве строительных материалов. Для погрузки сыпучих материалов в трюмы судна включают прием на загрузочный желоб сыпучего материала с пневмоколесного транспорта, а перемещают загрузочный желоб посредством кинематических связей с силовыми цилиндрами. Силовые цилиндры обеспечивают поворот загрузочного желоба в вертикальной плоскости, а погрузку сыпучего материала в трюм судна периодически перемещают посредством привода тележки с загрузочным желобом по рельсам на всю длину фронта погрузки, равного суммарной длине трюмов судна. Тележка снабжена дополнительным загрузочным желобом и кинематическими связями обоих загрузочных желобов с силовыми цилиндрами через Г-образные рычаги. Привод выполнен в виде автономной силовой установки, а силовая установка расположена на тележке. Синхронизация работы силовых цилиндров обеспечивается автоматически через блок управления, которые установлены на тележке и на загрузочных желобах. Загрузочные желоба выполнены в виде емкости, равной вместимости пневмоколесного транспорта, с V-образным днищем. Достигается повышение производительности и безопасность ведения работ, повышение надежности. 2 ил.
Комментарии