Способ позиционирования бобины и устройство для его осуществления - RU2066290C1
Код документа: RU2066290C1
Чертежи

Описание
Изобретение касается способа и устройства для позиционирования бобины, подаваемой подающим устройствам и опрокидываемой из положения подачи в положение, удобное для ее захвата.
Современные прядильные машины оборудованы обычно транспортными устройствами, которые забирают изготовленные этими машинами бобины с пряжей или накапливают их и отводят на упаковку. Обычно бобины упаковывают на поддонах для оправки таким образом, что они расположены на поддонах вертикально для защиты слоев пряжи. Горизонтально поступающие бобины необходимо привести в это положение и по возможности без касания слоев пряжи транспортировать от машины на поддон.
Известен, например, шестикоординатный модулятор для автоматического съема бобин с пневматической прядильной машины, который оснащен захватом
с
электронным управлением. Манипулятор распознает бобину и ее положение на конце выталкивающего ее транспортера машины, захватывает бобину и передает с электронным управлением к транспортной тележке
("VDI Nachrichten" N 44, 30 окт. 1987 г. с. 36). Это устройство является чрезвычайно дорогим и сложным из-за использования управляемого по шести координатам робота [1]
Известна также
обработка бобин посредством систем для размещения на поддонах и их полностью автоматического удаления из машины. Для размещения бобин на поддоне в заданном месте необходимо точно знать положение
бобины и положение ее оси, с тем чтобы манипулятор взял бобину и транспортировал ее без повреждений. Для этой цели при размещении на поддоне с помощью системы "Палли" бобины с горизонтальной осью
подают с транспортера прядильной машины к ее концу и там снимают посредством этой системы. Если система расположена на конце транспортера, бобины опрокидывают на два параллельных транспортера. При
этом выступающая за торец бобины гильза находится между транспортерами, несущими бобину на ее торце. Эти параллельные транспортеры подают опрокинутые бобины в нужное положение под захватным
устройством, для того чтобы оно могло снять их и уложить на поддон. Это устройство занимает очень много места и имеет относительно сложную конструкцию. Требуются поисково-позиционирующие устройства с
электронным управлением, с тем чтобы снимающее устройство на каждой прядильной машине можно было установить на соответствующий размер бобин.
(Из DE N 3912683 AI) Известно устройство,
состоящее из опрокидывающего органа 25, сочлененного с ним позиционирующего ленточного транспортера 26 и центрирующего устройства 35. Орган 25 служат для вертикального ориентирования оси бобины путем
ее поворота на 90o. Он передает бобины после их опрокидывания на транспортер 26, который подает их к устройству 35, обеспечивающему точное позиционирование каждой бобины, с тем, чтобы
захват 47 мог взять бобину и подать ее к плоскости погрузки. Это устройство относительно сложное и дорогое. Кроме того, при центрировании бобины существует опасность повреждения слоев пряжи [2]
Задача изобретения состоит в устранении недостатков уровня техники и разработке способа и устройства для приведения, простым надежным образом с экономией места подаваемых транспортером бобин в
определенное положение, из которого они могут быть взяты захватным устройством.
Эта задача решается согласно изобретению посредством признаков пп.1 и 8 формулы. Бобины приводятся при опрокидывании вместе с движением опрокидывания в предусмотренное для их взятия захватом положение. Большое преимущество этого решения состоит в том, что оба действия опрокидывание и центрирование бобин накладываются друг на друга или комбинируются и выполняются в одном устройстве. Это имеет то преимущество, что требуется только один привод и что комбинированное устройство занимает очень мало места. Большое преимущество также в том, что для позиционирования бобин в противоположность уровню техники не требуется дополнительное время, поскольку позиционирование происходит при опрокидывании.
Предпочтительным образом процесс опрокидывания инициируется подаваемой транспортным устройством бобиной, а не внешними датчиками или коммутационными устройствами. Благодаря этому непосредственному управлению, обходящемуся без промежуточных звеньев, опрокидывающее устройство не начинает опрокидываться пока не будет бобины. Преимущество в том, что процесс опрокидывания начинается лишь тогда, когда к опрокидывающему устройству бобина прилегает в стабильном равновесии, лишь после чего начинается позиционирование. При этом происходит щадящее манипулирование бобиной.
Преимущество изобретения также в том, что бобины приводятся в заданном положении независимо от их диаметра и конусности. Трудностей, связанных с манипулированием подаваемых бобин разного диаметра, при этом способе вообще не возникает, поскольку бобины позиционируются посредством гильзы и тем самым очень простым образом достигается всегда однозначное позиционирование середины бобины.
Предпочтительным образом позиционирующее и опрокидывающее устройства снабжены общим приводом, причем предпочтительно также расположить параллельно два опрокидывающе-позиционирующих устройства и снабдить их общим приводом, предпочтительно пневматическим. Этот привод лучше электрического или гидравлического, однако могут использоваться и такие приводы.
Предпочтительным образом позиционирующее устройство снабжено только одним подвижным упором. В противоположность нескольким подвижным упорам, движущимся отчасти также по сложным траекториям, этот упор, движущийся в одном направлении, прост и функционально надежен. Другие описаны в зависимых пунктах.
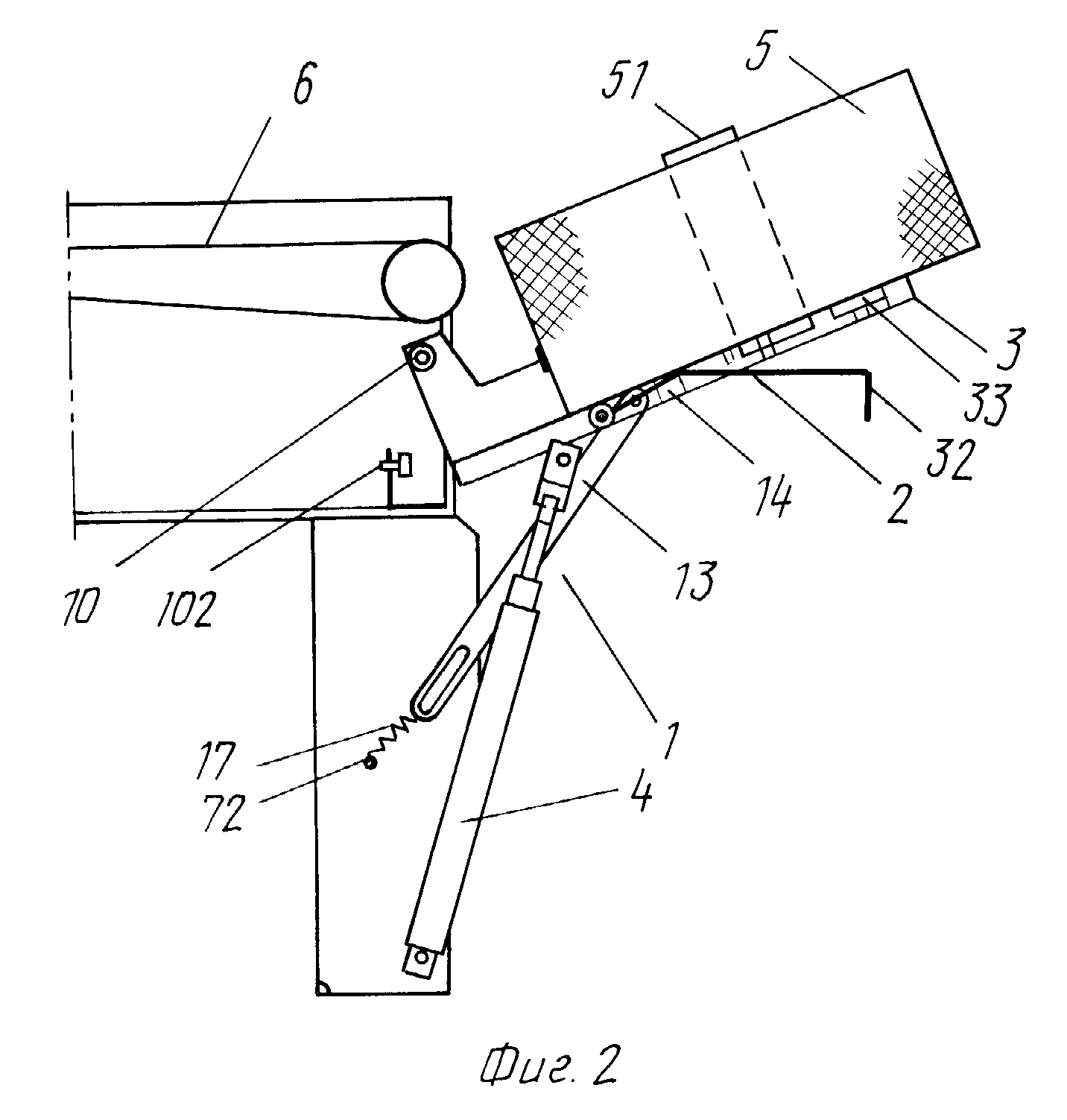
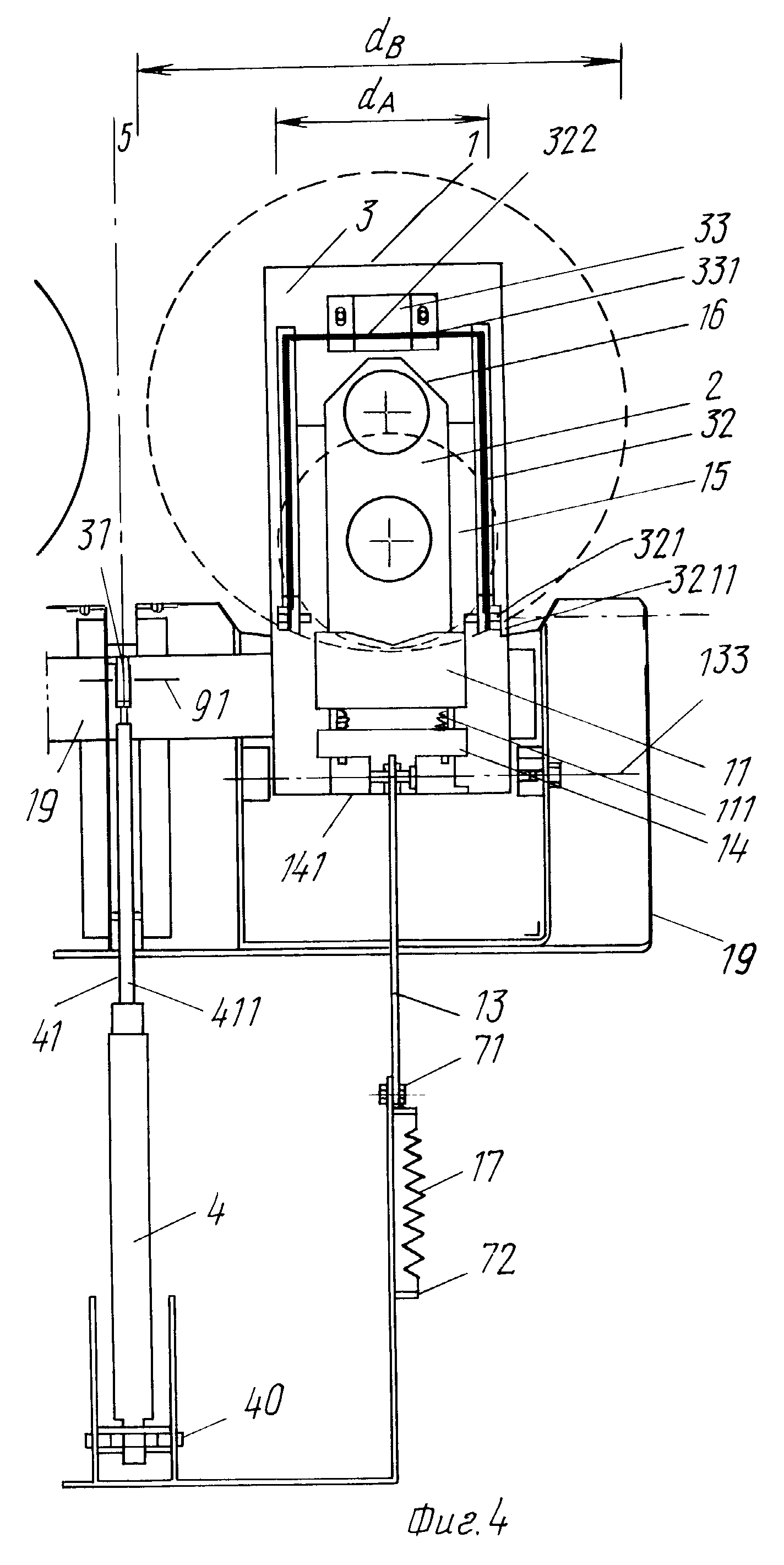
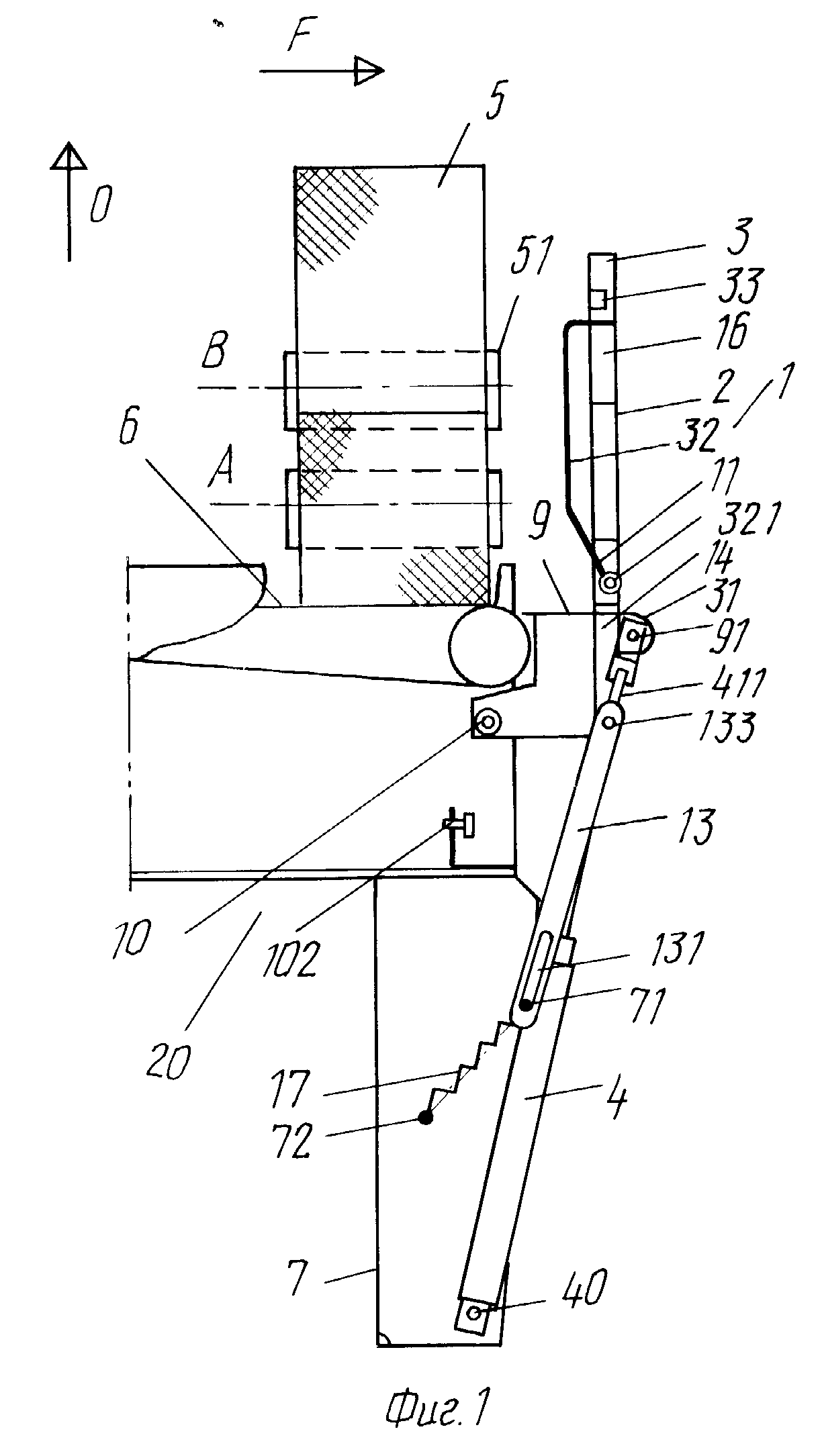
На фиг. 1 изображено предлагаемое устройство перед опрокидыванием бобины, вид сбоку, на фиг. 2 то же, во время опрокидывания бобины, на фиг. 3 то же, после опрокидывания бобины, на фиг. 4 предлагаемое устройство перед опрокидыванием, вид спереди.
На фиг. 1 изображено устройство l перед опрокидыванием бобины 5 незадолго до того, как она покинет транспортер 6 и попадает на подставку 9 приспособления 1. Подставка 9 может быть снабжена сбоку небольшим возвышением для предварительного центрирования бобины 5 так, чтобы ее гильза 51 надежно вошла в позиционирующий механизм 2. Приспособление 1 изображено здесь в установленном на конце подающего устройства варианте. Подающее устройство содержит ленточный транспортер 6, на который бобины крестовой намотки разной величины укладываются посредством не показанного устройства и транспортируются транспортером 6 к концу подающего транспортера (на примере вправо) для опрокидывания и позиционирования приспособления 1, за счет чего бобина (в положении, показанном на фиг. 3) может быть взята подходящим сверху манипулятором. Здесь показаны бобины двух размеров маленькая бобина с осью А и большая бобина с осью Б. Бобины подаются транспортером 6 в направлении стрелки F к плите 3 приспособления 1.
Плита 3 установлена с возможностью поворота вокруг горизонтальной оси 10. Подставка 9 закреплена под прямым углом на плите 3 приблизительно на высоте транспортера 6 и продолжается в виде рычага 31, в точке опоры 91 которого шарнирно закреплен шток 411 поршня 41. Поршень 41 является подвижной частью пневмоцилиндра 4, шарнирно закрепленного одним концом в неподвижной точке опоры 40. Устройство отрегулировано таким образом, что поршень 41, когда он движет шток 411 в цилиндре 4 вниз, опрокидывает плиту 3 вокруг оси 10 по часовой стрелке, в результате чего плита 3 располагается горизонтально, упираясь в регулируемый упор 102, установленный неподвижно на конце подающего транспортера 20 (фиг. 3). В точке сочленения 91 рычага 31, прочно соединенного с плитой 3, шарнирно закреплен шток 411. На плите 3 расположен упор 41, перемещающийся в направляющей 15. На оси 133 упора 14 шарнирно закреплен шатун 13. Упор 14 свободно перемещается между кромкой набегания 141 к неподвижным упором 16 на плите 3. Противоположный точке сочленения 91 конец шатуна 13 снабжен пазом 131, через который проходит неподвижно закрепленный на держателе 7 штифт 71. На шатуне 13 закреплена пружина 17, которая притягивает шатун 13 к точке своего крепления 72, как только он сможет в результате опрокидывания плиты 3 совершить движение в зоне паза 131. С возможностью перемещения относительно упора 14 расположена насадка 11, отжимаемая от упора 14 пружинами 111. При движении упора 14 по стрелке О насадка 11 может подпружинено двигаться к нему, если натолкнется на препятствие. Таким образом, устройство захватывает гильзу 51, выступающую за поверхность прилегающей к приспособлению 1 бобины 5, и позиционирует ее. Позиционирование происходит независимо от диаметра бобины, поскольку оно определяется только гильзой 51. Взятие бобины 5 захватом значительно облегчено, поскольку ее центр при одинаковых диаметрах находится всегда в одном и том же положении.
На плите 3 с возможностью поворота вокруг оси 321 расположен хомут 32 прижимаемый посредством опирающейся на плиту 3 спиральной пружины 3211 и направлении транспортера 20 и фиксированный на удерживающей кромке 331 выключателя 33. Этот выключатель, закрепленный на плите 3, выполнен в виде индуктивного выключателя, причем коммутирующий импульс вырабатывается в зависимости от того, находится ли перед выключателем металлический предмет или нет. В данном примере этим металлическим предметом является поперечная штанга 322.
Хомут 32 выполнен двойным в форме перевернутой буквы U. Поперечная штанга 322 хомута (фиг. 4) находится в положении, в котором в плиту 3 не упирается бобина 5 в активной зоне выключателя 33. Удаление штанги 322 из этой зоны вызывает подачу выключателя 33 коммутирующего импульса к устройству управления 18 (не показано) для инициирования процесса опрокидывания.
Процесс протекает следующим образом.
Транспортер 6 движется по стрелке F и несет бобину 5 к опрокидывающему приспособлению 1. Бобина 5 покидает транспортер 6, попадает на подставку 9 под действием транспортера и движет хомут 32 по направлению к плите 3, в результате чего хомут 32 поворачивается вокруг оси 321 и бобина 5 отклоняется. Поперечная штанга 322 хомута 32 движется из активной зоны выключателя 33 и вызывает выключение привода транспортера 6. Одновременно с этим выключатель 33 управляет электромагнитным клапаном (не показан) под действием которого шток 411 движется внутрь пневмоцилиндра 4. Поскольку шток 411 сочленен в точке 91 с рычагом 31 плиты 3, она опрокидывается за счет движения штока 411 вокруг оси 10. Это вызывает одновременно поворот точки сочленения 133 шатуна 13 и соответственно плиты 3 вокруг оси 10. Шатун 13 движется за счет силы тяжести и при поддержке пружины 17, закрепленной одним концом в точке 72 на держателе 7 и воздействующей другим концом на конец шатуна 13 со стороны паза 131. Точка сочленения 133 шатуна поворачивается вокруг оси 10, а другой конец шатуна одновременно поворачивается посредством движущегося в пазу 131 штифта 71, пока он не достигнет "верхнего" конца паза. Начиная с этого момента шатун 13 поворачивается только вокруг неподвижного штифта 91, за счет чего сочлененный с шатуном 13 упор 14, расположенный на плите 3 с возможностью перемещения, движется по направлению к неподвижному упору 16 и подвигает выступающий в траекторию движения упора 14 конец гильзы 51 бобины 5 и саму бобину по направлению к упору 16. Устройство отрегулировано таким образом, что после поворота плиты 3 вокруг оси 10 это то положение, в котором плита 3 упирается в упор 102 гильза 51 бобины 5 подвинута ровно настолько, что она прочно упирается в V-образный упор 16 и V-образную насадку упора 14 и тем самым точно позиционирована (фиг. 3). Предпосылкой, правда, является то, что в основу регулировки устройства положен определенный диаметр гильзы бобины. Это, однако, не представляет, как правило, трудностей, поскольку гильза имеет коническую форму, она, при условии что бобина была ориентирована большим диаметром в направлении опрокидывающего приспособления, точно позиционирована между упорами 14, 16.
В дальнейшем процессе, идущий сверху, захват (не показан) берет бобину 5 за гильзу 51 и, двигаясь вверх, снимает бобину 5 с плиты 3. Это вызывает пружинение хомута 32, за счет чего он возвращается своей поперечной штангой 322 в активную зону выключателя 33. Устройству управления (не показано) подается команда о том, что на плите 3 нет больше бобины 5. За счет управления посредством реле времени или оптического опроса электромагнитный клапан получает коммутирующий импульс, а пневмоцилиндр 4 снова нагружается давлением, в результате чего шток 411 выдвигается и плита 3 устройства l возвращается в первоначальное вертикальное положение. При этом принудительным образом шатун 123 движется вверх и за счет принудительного ведения паза 131, зависающего на штифте 71 начиная с определенного момента времени, упор 14 отделяется от упора 16. Это создает предпосылку того, что гильза 51 новой бобины 5 может без проблем "погрузиться" между обоими упорами, в результате чего процесс опрокидывания начинает заново.
На фиг. 2 устройство l показано в положении, в котором плита 3 повернута вокруг оси 10 настолько, что упор 14 воздействует на гильзу 51 бобины 5. В этом положении процесс позиционирования начинается за счет смешения во время опрокидывания плиты 3 из вертикальное.
На фиг. 3 изображено описанное выше положение, в котором бобина 5 позиционирована и готова для ее взятия захватом. Лежащие перед опрокидыванием одна над другой оси А, В маленькой и большой бобин находятся в том же месте. Бобина 5 сдвинута за счет смещения упора 14 с подставки 9 по направлению к упору 16.
На фиг. 4 изображено исполнение устройства согласно изобретению, установленного на двойном ленточном транспортере, причем предпочтительным образом для двух плит 3 требуется один пневмоцилиндр 4. Устройство для кратности изображено не полностью. Его следует представить себе по оси симметрии S. Обе плиты 3 соединены соединительной пластиной 19, причем точка сочленения 91 рычага 31 плиты 3 смещена от плиты 3 точно в середину между обеими плитами. Благодаря этому требуется только один цилиндр 4, а именно каждый раз для одной опрокидывающейся плиты 3. Преимущество в том, что цикл загрузки и выгрузки транспортеров можно регулировать так, что один транспортер загружается бобинами не показанными устройством и во время этого процесса неподвижен, а другой транспортер разгружается, причем бобины подаются к концу транспортера, опрокидываются, позиционируются и удаляются. Можно также оборудовать это устройство для трех и более расположенных рядом транспортеров только одним пневмоцилиндром, который в этом случае должен быть более мощным для компенсации холостой массы устройства.
Такое расположение нескольких плит 3 на опрокидывающем устройстве l может, конечно, использоваться и непосредственно на ленточном транспортере для бобин прядильной машины.
Вместо пневмоцилиндра может использоваться червячный или реечный привод. Коммутационно управляющее устройство с хомутом 32 и выключателем 33 может быть заменено обычными выключателями и/или датчиками. Возможно также, чтобы хомут 32 приводил в действие непосредственно пневмоклапан для управления пневмоцилиндром 4.
Импульс для инициирования процесса опрокидывания может подаваться также устройством косвенного управления, устанавливающим, например, положение поступающей по транспортеру 6 бобины в предназначенном для опрокидывания месте. Шатун 13 может быть выполнен без паза, а с отверстием на конце, в которое вставлен штифт 71. Однако тогда уже будет невозможно надежно и точно опрокидывать между упорами в "открытом" положении подаваемые транспортером бобины разных диаметров. Диапазон диаметров бобин был бы значительно сужен. На фиг. 4 изображено также расположение насадки 11 упруго соединенной с упором 14. Насадка 11 и упор 14 движутся, например, в направляющих 15, выполненных в виде гребня, паза и т.п. На фиг. 4 хорошо видно, в каком диапазоне могут обрабатываться диаметры бобин без использования на опрокидывающем устройстве каких-либо особых или сложных механизмов. Этот диапазон составляет здесь dA-dB.
Изобретение не ограничено изображенным вариантом исполнения. Можно также расположить устройство неподвижно на транспортерах и т.п. а в передвижных устройствам для укладки на поддоны или упаковочных устройствах, которые подаются к разгружаемому транспортеру и осуществляют процесс разгрузки.
Реферат
Использование. Изобретение относится к оборудованию для прядильных машин, а именно для позиционирования бобин, подаваемых подающим приспособлением. Сущность изобретения: cпособ позиционирования бобины включает подачу бобины транспортирующим механизмом и опрокидывание ее из положения подачи в положение, удобное для ее захвата, при этом бобину подают с горизонтально расположенной осью и опрокидывают в положение с вертикально расположенной осью, причем одновременно с опрокидыванием бобину размещают в предусмотренное для приема захватом положение, не зависимое от ее диаметра, при этом процесс опрокидывания начинают подачей бобины, которую дополнительно позиционируют посредством выступающей за пределы ее поверхности гильзы, а процесс позиционирования начинают лишь после начала процесса опрокидывания. Устройство для осуществления указанного способа содержит транспортирующий механизм для подачи бобины, опрокидывающее приспособление и позиционирующий механизм, при этом позиционирующий механизм встроен в опрокидывающее приспособление с возможностью совместного перемещения. 3 з. п. ф -лы, 4 ил.
Комментарии