Устройство и способ для управления поворотом объекта на носителе - RU2736244C1
Код документа: RU2736244C1
Чертежи






Описание
Настоящее изобретение относится к устройству и способу для управления поворотом объекта на носителе.
Системы подачи на грузовые поддоны используются для формирования по условиям заказчика слоя для грузового поддона, формирующего изделия, посредством позиционирования и/или ориентации изделий на носителе. К ориентации изделий на носителе относится поворот упомянутого объекта на упомянутом носителе.
Под изделиями понимаются, помимо прочего, (картонные) коробки и подносы, а также наполненные пакеты. В заявке такие изделия в основном называются объектами.
Для позиционирования и/или ориентации таких изделий в системах подачи на грузовые поддоны может использоваться один или несколько элементов из числа направляющих дорожек, конвейерных лент или робототехники.
Целью большинства систем подачи на грузовые поддоны является обеспечение повышенной гибкости для формирования по условиям заказчика слоя для грузового поддона из самых разнообразных изделий и с максимально возможной пропускной способностью. Кроме того, чтобы гарантировать правильное формирование, также целью является точное размещение различных изделий с высокой пропускной способностью. Когда пропускная способность увеличивается, это часто приводит к снижению точности позиционирования и/или ориентации изделий.
Важно, чтобы независимые объекты имели достаточное пространство, которое позволяет индивидуально манипулировать этими объектами, то есть позиционировать и/или ориентировать эти объекты. На доступное пространство вокруг объекта может отрицательно влиять слишком ограниченное расстояние между последовательно расположенными объектами. Хотя между последовательными объектами, которые по существу выровнены относительно друг друга, может быть очень ограниченное пространство, смещенный вбок объект может еще больше уменьшать имеющееся пространство. В худшем случае в ситуации бокового смещения прямоугольного объекта - вместо одной из сторон объекта, расположенной вдоль оси, может оказаться вдоль оси диагональ объекта. Если последующие объекты не выровнены вдоль одной линии, то пространство между объектами уменьшается еще больше.
В документе US 2007/205083, который раскрывает наиболее близкий аналог изобретения, описаны способ и устройство для уменьшения вероятности заклинивания объекта в конвейерной системе. Измеряется габаритный размер объекта, который поворачивается в том случае, если этот габаритный размер превышает пороговое значение. Устройство в соответствии с документом US 2007/205083 только приблизительно и неточно выравнивает объекты. В этом случае достаточно, если исправленная ориентация объектов позволяет им проходить критический проход в конвейерной системе, например, войти в инспекционную единицу системы обработки багажа в аэропорту. В отличие от систем подачи на грузовые поддоны, выравнивание не является критическим фактором при обработке багажа. По сравнению с документом US 2007/205083 по меньшей мере отличительные признаки независимого пункта 1 формулы изобретения являются новыми.
Документ EP 2792663 раскрывает устройство и способ для формирования заранее определенной формы на конвейерной ленте. Захват перемещает объекты в желаемую форму. Чтобы захватить объект, сам захват требует, чтобы объекты были выровнены в линию. Следовательно, захват в документе EP 2792623 перегруппировывает объекты вместо выравнивания объектов, которые могут оказаться в произвольной ориентации.
Задачей настоящего изобретения является создание устройства, которое является улучшенным по сравнению с предшествующим уровнем техники, и в котором устранена по меньшей мере одна из вышеуказанных проблем.
Указанная задача достигается с помощью устройства по п. 1 настоящего изобретения.
Кроме того, указанная задача достигается с помощью способа по п. 5 настоящего изобретения.
Устройство содержит измеритель, выполненный с возможностью измерения размера объекта относительно по меньшей мере одного направления. С помощью такого измерителя можно измерять размер объекта относительно по меньшей мере одного направления и при повороте объекта вокруг вертикальной оси. На основании этих измерений можно определить изменение указанного размера объекта. Устройство содержит контроллер, выполненный с возможностью определения этого изменения размера объекта, причем указанный контроллер дополнительно выполнен с возможностью управления поворотом объекта для выравнивания указанного объекта в желаемой ориентации на основе установленного изменения размера объекта. С помощью измерителя дополнительно возможно измерять зазор между последовательными объектами.
По существу, прямоугольные объекты должны интерпретироваться широко в описании данного изобретения и могут также включать в себя, например, мешкообразные объекты (например, мешки с песком, почву для горшков, удобрения или корма для животных). Для настоящего изобретения объект интерпретируется как являющийся по существу прямоугольным, если он устанавливает ориентацию с помощью его стороны, которая может быть выровнена по одной линии с направлением транспортировки указанного объекта.
Если выравнивание первого объекта известно и предпочтительно он по существу на линии, которая совпадает с направлением транспортировки объекта, то измеритель может использовать указанный зазор между этим первым объектом с известным выравниванием, чтобы определить, правильно ли выровнен следующий объект, или может потребоваться регулировка. Кроме того, как описывалось во введении, также важно, чтобы независимые объекты имели достаточное пространство, которое позволяет индивидуально манипулировать ими, то есть позиционировать и/или ориентировать.
Для многих практических вариантов применения, особенно для систем подачи на грузовые поддоны, точное выравнивание по одной линии является критическим фактором. Точное выравнивание объекта относительно, например, направления его транспортировки требует, чтобы был определен один или более чем один абсолютный внешний размер объекта. Напротив, известное устройство из документа US 2007/205083 измеряет фронтальную поверхность объекта, чтобы оценить, может ли он пройти через критический проход. Если измеряемый объект не выровнен идеально, как это обычно бывает с багажом в системе обработки багажа, фронтальная поверхность определяется внутренним размером в разрезе объекта. Согласно изобретению требуется использование измерителя внешнего размера боковой поверхности объекта, что позволяет контроллеру выровнить боковую поверхность объекта по существу по одной линии с направлением транспортировки.
Предпочтительные варианты осуществления являются предметом зависимых пунктов формулы изобретения.
В последующей части описания предпочтительные варианты осуществления настоящего изобретения дополнительно поясняются со ссылкой на чертежи, на которых:
фиг. 1 - вид в перспективе устройства согласно изобретению;
фиг. 2 - схематический вид сверху варианта применения устройства согласно изобретению в системе подачи для укладки на поддонах;
фиг. 3 - схематический вид сверху устройства согласно фиг. 1;
фиг. 4 - схематический вид сверху устройства в соответствии с фиг. 3, в котором объекты поворачиваются вокруг вертикальной оси;
фиг. 5 и 6 - схематические виды сверху устройства в соответствии с фиг. 3 и 4, в котором выявляются объекты, которые располагаются на носителе со смещением от центра;
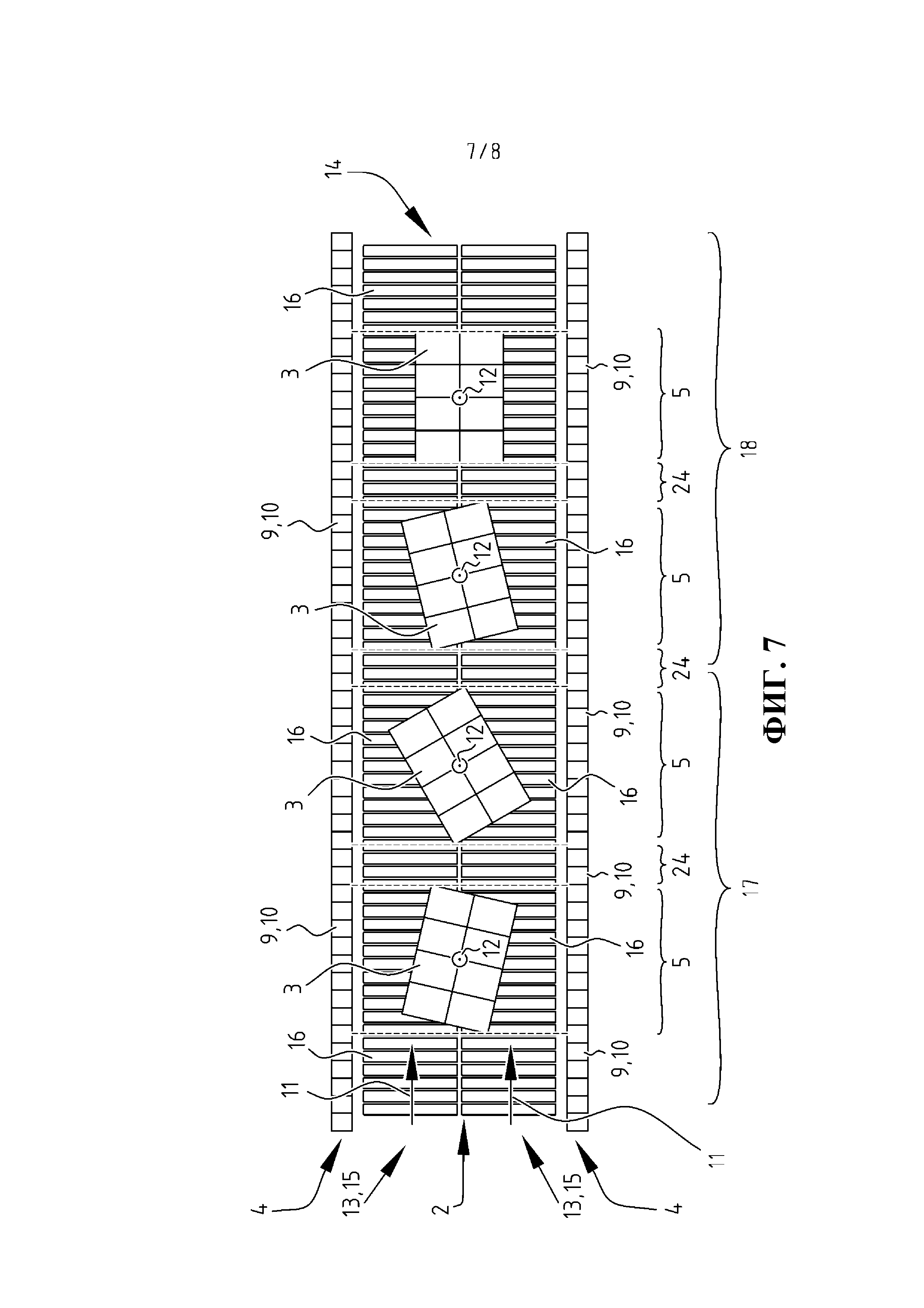
фиг. 7 - вид сверху еще одного варианта осуществления изобретения, в котором носитель представляет собой секционный роликовый конвейер; и
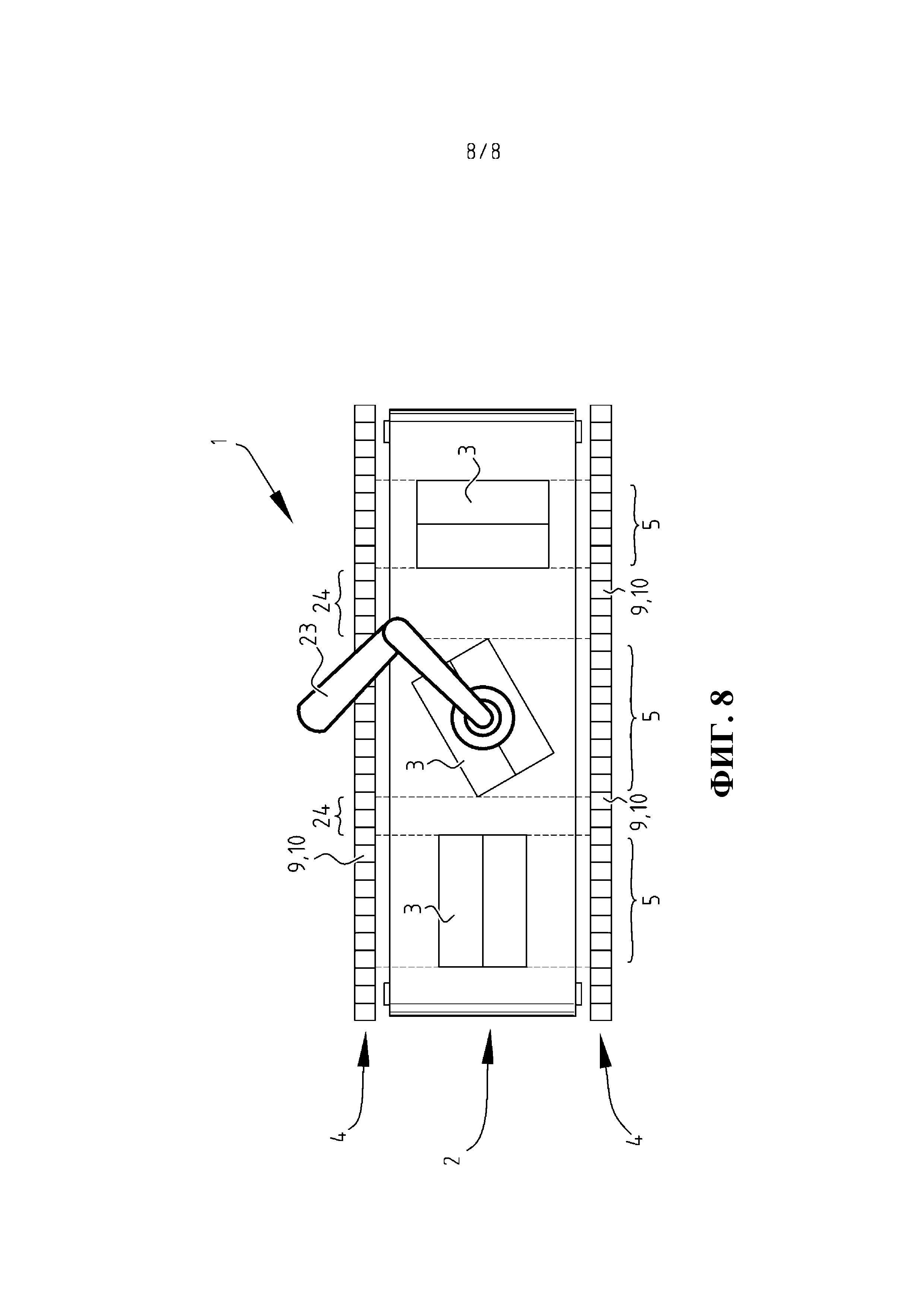
фиг. 8 - вид сверху еще одного варианта осуществления изобретения, содержащего робот.
Устройство 1, показанное на фиг. 1 и 2, содержит носитель 2 для последовательного перемещения объектов 3, и измеритель 4, включенный с возможностью измерения размера 5 объекта 3 по меньшей мере в одном направлении 6. Устройство 1 содержит контроллер 7, выполненный с возможностью определять изменение размера 5 объекта 3 и управлять поворотом объекта 3 для выравнивания объекта 3 в желаемой ориентации на основе определенного изменения размера 5 объекта 3.
Измеритель 4 выполнен с возможностью измерения внешнего размера боковой поверхности объекта 3, а контроллер 7 выполнен с возможностью выравнивания боковой поверхности упомянутого объекта 3, по существу, по одной линии с направлением транспортировки объекта 3. На основе внешнего размера боковой поверхности объекта 3, контроллер 7 может точно выравнивать указанный объект 3 в желаемой ориентации.
Носитель 2 выполнен с возможностью последовательно поворачивать объекты 3 на носителе 2, а контроллер 7 выполнен с возможностью управления поворотом объекта 3 на носителе 2. Таким образом, устройство 1 способно последовательно ориентировать и позиционировать объекты 3, чтобы формировать индивидуальный слой 8 грузового поддона, как показано на фиг. 2.
Измеритель 4 содержит один или несколько детекторов 9. Измеритель 4 содержит по меньшей мере один детектор 9 из группы, содержащей по меньшей мере один из следующих датчиков: датчик приближения, фотодатчик, видеодатчик, ультразвуковой датчик. Как показано на фиг. 3-8, измеритель 4 содержит массив датчиков 10.
На показанных фигурах направление 6 измерения в основном сбоку: прямо (поясняется на фиг. 4) и/или наклонно (поясняется на фиг. 5 и 6), но направление 6 измерения может соответствовать по меньшей мере одному из следующих видов: сбоку, сверху, фронтальный, задний или наклонный.
Система 26 подачи для укладки на поддоны, показанная на фиг. 2, содержит поворотную часть 27, часть 28 формирования и накопитель 29 слоя. В поворотной части 27 объекты 3 ориентируются и/или позиционируются. Для такого ориентирования и позиционирования используется измеритель 4, как более подробно описывается ниже.
На фиг. 1 и 2 дополнительный измеритель 4' располагается над носителем 2 и поперечно по отношению к направлению перемещения 11 конвейеров 13, 15. Этот дополнительный измеритель 4' также показан на фиг. 6, где он обеспечивает альтернативный способ определения наклонной ориентации объекта 3 на носителе 2. Если смотреть сверху вниз в направлении носителя 2, специальные детекторы 9, 10 измерителя 4' будут выявлять объект 3. Если объект 3 выровнен с направлением 11 перемещения носителя 2, множество детекторов 9, 10 будут более или менее одновременно обнаруживать объект 3, который приближается к передней части детектируемой области. Однако, если объект 3 смещен, как показано на фиг. 6, наиболее выступающий вперед угол объекта 3 будет обнаруживаться первым. Таким образом, дополнительный измеритель 4' способен обнаруживать различие между объектами 3, которые выровнены с направлением перемещения 11, и объектами 3, которые ориентированы наклонно относительно направления перемещения 11. Кроме того, в зависимости от того, какой угол объекта 3 наиболее выдвинут вперед в направлении перемещения 11, контроллер 7 может решать, какой поворот приведет к желаемому выравниванию наиболее эффективным образом.
Часть 28 формирования может быть снабжена дополнительными измерителями 4'' (фиг. 2), которые используются для определения положения объекта 3 на части 28 формирования. С использованием полозьев 30, объекты 3 могут быть смещены в желаемое положение.
Кроме того, накопитель 29 слоя может быть снабжен дополнительными измерителями 4''', которые способны определять расстояние между (рядами) объектов 3 в накопителе 29 слоя (фиг. 2).
На фиг. 4 показаны этапы способа: подача объекта 3, измерение размера 5 объекта 3 относительно по меньшей мере одного направления 6, поворот объекта 3 вокруг вертикальной оси 12 и определение изменения размера 5 объекта 3, тем самым осуществляется выравнивание объекта 3 в желаемой ориентации на основе установленного изменения. Если прямоугольный объект 3 выровнен с направлением транспортировки носителя 2, измеритель 4, который располагается на боковой стороне носителя 2 на фиг. 3, будет измерять размер 5 объекта 3, который соответствует длине L (показана) или ширине W объекта 3.
В вариантах, показанных на фиг. 1, 3-7, носитель 2 содержит два параллельных конвейера 13. Два параллельных конвейера 13 способны функционировать как поворотный конвейер. Объект 3 может поддерживаться на двух параллельных конвейерах 13, и за счет разницы в скоростях между двумя параллельными конвейерами 13, объект может поворачиваться. Если два параллельных конвейера 13 приводятся в движение в одном и том же направлении 11 перемещения во время поворота объекта 3, объект 3 поворачивается во время непрерывного перемещения вперед. Альтернативно, также возможно поворачивать объект на месте, приводя в движение два параллельных конвейера 13 в противоположных направлениях.
Конвейеры 13 могут представлять собой конвейерную ленту (фиг. 3-6) или, предпочтительно, секционный роликовый конвейер 14 (фиг. 7). Секционный роликовый конвейер 14 содержит две параллельные дорожки 15 ведомых роликов 16. Преимущество секционного роликового конвейера 14 состоит в том, что он может содержать по меньшей мере две секции 17, 18, которые могут приводиться в действие независимо и которые расположены последовательно на одной линии, то есть в направлении 11 перемещения конвейеров 13. Измеритель 4 предпочтительно выполнен с возможностью измерения расстояния 24 между последовательными объектами 3, и в этом случае контроллер 7 выполнен с возможностью регулировки расстояния 24. Регулирование расстояния 24 между последовательными объектами 3 может быть выполнено посредством независимого приведения в движение по меньшей мере двух секций 17, 18 носителя 2 с различной скоростью. Например, когда расположенная выше по ходу перемещения секция 17, управляемая приводом, перемещается с более медленной скоростью, чем расположенная ниже по ходу перемещения секция 18, управляемая приводом, расстояние 24 между последовательными объектами 3 увеличивается.
Каждый из двух параллельных конвейеров 13 может иметь наклон в направлении, поперечном направлению перемещения 11 конвейеров 13, при этом два параллельных конвейера 13 вместе образуют V-образную форму. Таким образом, два параллельных конвейера 13 вместе образуют V-образную форму, в которой каждая ветвь буквы V образована одним из параллельных конвейеров 13. Если сторона объекта 3, обращенная к конвейерам 13, является изогнутой, а не по существу плоской, V-образная форма может увеличить поверхность контакта между объектом 3 и конвейерами 13. Таким образом, объекты, опирающиеся на изогнутые стороны, могут быть эффективно повернуты с использованием двух параллельных конвейеров 13.
Предпочтительно, наклон двух параллельных конвейеров 13 является регулируемым. Контроллер 7 может регулировать уровень наклона на основе измеренного размера 5 объекта 3. V-образная форма может способствовать равномерному распределению объектов 3 по двум параллельным конвейерам 13. Если объект 3 распределен равномерно, то есть центрирован, на двух параллельных конвейерах 13, объекты 3 могут поворачиваться с высокой степенью точности. Кроме того, для объектов 3, опирающихся изогнутой поверхностью на два параллельных конвейера 13, контактная поверхность может быть оптимизирована посредством регулировки уровня наклона на основе кривизны поверхности, которой объект 3 опирается на два параллельных конвейера 13.
Может быть предусмотрен дополнительный (не показан) пресс, который выполнен с возможностью прижимать объект 3 по меньшей мере во время поворота объекта вокруг его вертикальной оси на двух параллельных конвейерах 13. Таким образом, пресс прижимает объект с силой, ориентированной противоположно вертикальной оси 12. Таким образом, пресс обеспечивает сцепление между двумя параллельными конвейерами и объектом 3, и тем самым гарантирует надежный и точный поворот объекта 3.
Способ содержит этап поворота объекта 3 вокруг вертикальной оси 12 и определения изменения размера 5 объекта 3 (фиг. 4). Способ предпочтительно также содержит этап определения по меньшей мере одного минимального значения размера 5 объекта 3. Это минимальное значение не обязательно соответствует абсолютному минимуму, то есть наименьшей стороне (ширине W) прямоугольного объекта 3. Во время поворота, например, прямоугольного объекта 3, ширина W и длина L изделия будут измеряться как минимальное значение при повороте. Способ, показанный на фиг. 4, включает поворот объекта 3 вокруг вертикальной оси 10 до тех пор, пока не будет измерено по меньшей мере одно минимальное значение. Следует заметить, что крайняя правая позиция объекта 3 имеет длину L, которая выровнена с направлением 11 транспортировки носителя 2. Длина L является размером 5, который меньше размеров 5 других трех объектов 3, которые ориентированы наклонно на держателе 2. Кроме того, эта длина L измеряется как минимальное значение, поскольку размер 5 будет увеличиваться, если объект 3 будет поворачиваться дальше, и станет наклонным относительно направления 11 транспортировки носителя 2.
Способ также может содержать этапы поворота объекта 3 вокруг вертикальной оси 12, последовательного или непрерывного измерения размера 5 объекта 3 относительно по меньшей мере одного направления 6, и прогнозирования по меньшей мере одного минимального значения объекта. Поворот объекта 3 приводит к периодической математической функции, из которой размер объекта может быть получен путем оценки минимумов, максимумов и/или локальных минимумов функции. Например, квадратный объект, который поворачивается с постоянной скоростью, будет давать математическую функцию синусоидальной формы. Для прямоугольного объекта 3 минимум периодической математической функции будет соответствовать ширине, максимум будет соответствовать диагонали, а локальный минимум будет характеризовать длину прямоугольного объекта 3.
Показанный способ содержит этап сохранения по меньшей мере одного минимального значения объекта 3 в памяти.
В дополнение к определению и сохранению минимального значения размера 5 объекта 3, способ может дополнительно содержать этап определения максимального значения размера 5 объекта 3. Прямоугольный объект 3 будет иметь только одно максимальное значение, которое соответствует диагональному расстоянию в сечении объекта 3.
Для определения такого максимального значения способ может содержать этап поворота объекта 3 вокруг вертикальной оси 12, пока не будет установлено максимальное значение.
В качестве альтернативы или дополнения к измерению максимального значения, способ может содержать этапы: поворота объекта 3 вокруг вертикальной оси 12, последовательного или непрерывного измерения размера 5 объекта 3 относительно по меньшей мере одного направления 6, и прогнозирования максимального значения объекта 3. Это максимальное значение объекта 3 может быть сохранено в памяти.
Способ может содержать этап определения размеров объекта 3 на основе определенного по меньшей мере одного минимального значения объекта и определенного максимального значения объекта 3. Особенно в том случае, если форма объекта 3 известна, эти размеры могут быть легко получены. Например, для прямоугольного объекта 3 размеры длины L и ширины W могут быть легко получены из измеренных значений.
Способ может дополнительно содержать проверку соответствия фактической ориентации объекта желаемой ориентации объекта посредством следующих этапов: измерение размера объекта относительно по меньшей мере одного направления и сравнение измеренного размера с определенным по меньшей мере одним минимальным значением объекта. Для прямоугольного объекта 3 минимальное значение будет соответствовать длине L или ширине W объекта 3. На основании размера 5, измеренного с помощью измерителя 4, устройство 1 может проверять, совпадает ли направление длины L или ширины W с направлением 11 перемещения носителя 2. Если размер 5, измеренный с помощью измерителя 4, отличается от минимального значения, то известно, что объект 3 располагается наклонно и не является выровненным (как показано в трех левых позициях объекта 3 на фиг. 4 и 7).
Для выравнивания объекта 3, который ориентирован наклонно, способ может содержать этап поворота объекта 3 вокруг вертикальной оси 12 до тех пор, пока измеренный размер 5 объекта 3 не будет соответствовать определенному по меньшей мере одному минимальному значению объекта 3.
Как упоминалось ранее, изменение размера 5 прямоугольного объекта 3 будет следовать периодическому пути, который может использоваться для прогнозирования минимального или максимального значения объекта 3. Также возможно, что размеры объекта 3 являются известными, и контроллер 7 может поворачивать объект 3 до тех пор, пока измеритель 4 не измерит значение, соответствующее ширине W или длине L объекта 3, что соответствует желаемой ориентации объекта 3 на носителе 2.
Повышенная точность может быть достигнута посредством этапов поворота объекта 3 вокруг вертикальной оси 12 и регулировки скорости поворота объекта 3 на основе разницы между измеренным размером 5 объекта 3 и по меньшей мере одним минимальным значением объекта. Таким образом, способ может в режиме реального времени регулировать скорость поворота на основе измеренного размера 5 объекта 3. По меньшей мере одно минимальное значение может быть определено или оно известно.
Чтобы иметь предсказуемый и желаемый поворот объекта 3, желательно, чтобы объект 3 был равномерно распределен на носителе 2, то есть поддерживался равномерно двумя конвейерами 13. Чтобы проверить, расположен ли объект 3 с равномерным распределением, устройство 1 может содержать первый детектор 19, который ориентирован наклонно относительно направления перемещения 11 носителя 2, при этом первый детектор 19 располагается рядом с носителем 2 (фиг. 5). Если размеры объекта, например, длина L и ширина W прямоугольного объекта 3 известны, первого детектора 19 достаточно для проверки, расположен ли объект 3 центрировано на носителе 2.
Центрированное расположение объекта 3 на носителе 2 может еще более точно оцениваться с помощью устройства 1, дополнительно содержащего второй детектор 20, который ориентирован наклонно относительно направления перемещения носителя 2, при этом первый наклонный детектор 19 и второй наклонный детектор 20 расположен на противоположных сторонах рядом с носителем 2. Способ, соответствующий этому варианту, включает определение, равномерно ли распределен объект 3 на носителе 2, путем сравнения данных детектора первого наклонного детектора 19 и второго наклонного детектора 20, которые оба ориентированы наклонно относительно направления перемещения 11 носителя 2, при этом первый наклонный детектор 19 и второй наклонный детектор 20 расположен на противоположных сторонах рядом с носителем 2. Если первый наклонный детектор 19 и второй наклонный детектор 20 обнаруживают объект 3 по существу одновременно, объект 3 по существу является центрированным. Если разница во времени между обнаружением объекта 3 наиболее ранним детектором из двух детекторов - первого и второго наклонных детекторов 19, 20 - и наиболее поздним детектором из указанных двух детекторов превышает определенное заданное пороговое значение, то объект 3 считается распределенным неравномерно. Контроллер 7 может вызывать тревожный сигнал и даже остановить устройство 1 для ручного вмешательства оператора.
Описанные выше способы проверки, центрирован ли объект 3 на носителе 2, предполагают, что размеры объекта 3 известны, либо заранее, либо определены/измерены устройством 1. В этом случае датчики 10 измерителя 4 могут проверить, соответствует ли измеренный размер 5 известному размеру 5 объекта 3, чтобы проверить, выровнен ли объект 3, т.е. не позиционирован ли он наклонно на носителе 2.
Кроме того, если размеры объектов 3 известны заранее, контроллер 7 может легко распознавать, что на носителе 2 имеется объект 3 с отклонением от нормальных размеров или объект аномальной формы. Если объекты 3 с отклонением от нормальных размеров неприемлемы, контроллер 7 может остановить процесс и выдать сигнал тревоги оператору. Аномальные формы объекта 3 также могут быть вызваны помятым объектом 3, который, таким образом, может быть распознан устройством 1 в соответствии с изобретением.
Однако, если размеры объекта 3 (пока) еще неизвестны, необходимо альтернативно определить выравнивание объекта 3, потому что размер 5, измеренный измерителем 4, нельзя сравнивать с известным размером, например, например, длиной L или шириной W объекта 3. На фиг. 6 показан еще один вариант устройства 1, которое способно определять, расположен ли объект 3 центрировано, то есть равномерно ли он распределен на носителе 2, без использования размера 5, измеренного измерителем 4. Устройство 1 на фиг. 6 дополнительно содержит по меньшей мере третий детектор 21, который ориентирован наклонно относительно направления перемещения 11 носителя 2, при этом третий детектор 21 расположен рядом с носителем. Способ, соответствующий этому варианту, содержит этап сравнения измерений третьего детектора 21 с измерением по меньшей мере одного из двух детекторов - первого 19 и второго наклонного детектора 20. Третий наклонный детектор 21 предпочтительно сравнивается с детектором, установленным на той же самой стороне носителя 2.
На фиг. 6 также показан четвертый детектор 22, который иллюстрирует, что вариант по фиг. 5 также способен выполнять этапы способа, описанные с использованием фиг. 6. Измеряя временную разницу между измерениями различных наклонных детекторов 19, 20, 21, 22 наклонная ориентация может быть определена контроллером 7. Первый наклонный детектор 19 или второй наклонный детектор 20 может функционировать как третий наклонный детектор 21. Другой из указанных двух наклонных детекторов 19 может даже функционировать как четвертый наклонный детектор 22. Первый наклонный детектор 19, второй наклонный детектор 20, третий наклонный детектор 21 и четвертый наклонный детектор 22 имеют наклонные направления измерений 19', 20', 21' и 22' соответственно, и предпочтительно все они интегрированы в измеритель 4. Эти наклонные детекторы 19, 20, 21 и 22 предпочтительно содержат по меньшей мере один детектор из группы, содержащей по меньшей мере один из следующих датчиков: датчик приближения, фотодатчик, видеодатчик, ультразвуковой датчик. Если используются подходящие датчики, они могут функционировать как детектор для измерения размера 5 объекта 3 относительно по меньшей мере одного направления 6 измерения, а также как наклонный детектор.
Оптимизация скорости поворота объектов 3 может быть достигнута путем оценки того, насколько легко или сложно контроллеру 7 выровнять боковую поверхность объекта 3, по существу, в линию с направлением транспортировки. Если выравнивание достигается легко, контроллер может постепенно увеличивать скорость поворота объектов 3. Однако, если выравнивание достигается относительно трудно, контроллер 7 может снизить скорость поворота объектов 3. Таким образом, контроллер 7 будет постепенно оптимизировать этап поворота объекта, чтобы выровнять его боковую поверхность, по существу, по одной линии с направлением транспортировки упомянутого объекта. Результатом этой оптимизации является стабильное и надежное выравнивание объектов с максимально возможной скоростью.
Изобретение может использоваться на различных типах носителей 2, таких как конвейерные ленты с использованием наборов приводных роликов, или автоматических платформ для транспортировки с использованием приводных роликов, или, как показано на фиг. 8, может содержать робот 23 с захватом для последующего поворота объектов 3. Робот 23 может ориентировать объект 3 и одновременно регулировать расстояние 24 в дополнение к расстоянию 24, на которое уже повлияла скорректированная ориентация объекта 3.
Измеритель 4 предпочтительно выполнен с возможностью измерения зазоров между последовательными объектами 3. Используя информацию об имеющемся расстоянии между последовательными объектами 3, контроллер 7 может определить, достаточно ли места для поворота объекта 3 и приведения его в желаемое положение выравнивания. Однако следует отметить, что эта функциональность определения зазоров также может применяться независимо от выравнивания объектов в желаемую ориентацию, и даже может быть выполнена при модернизации.
Измерение зазоров между последовательными объектами 3 может также предоставлять ценную информацию для контроллера 7, которая не обязательна для поворота объектов 3. Например, возникновение «пробки» может быть заранее распознано, и контроллер 7 может быть выполнен с возможностью регулировки скорости перемещения носителя 2, чтобы препятствовать возникновению заторов, прежде чем возникнут проблемы. Поскольку последнее не обязательно связано с поворотом объектов 3, оно может применяться независимо от способности поворачивать объекты 3.
Контроллер 7 может быть выполнен с возможностью самообучения, в результате чего получается постоянно возрастающая эффективность последовательного ориентирования и позиционирования объектов 3 для формирования индивидуального слоя для грузовых поддонов.
Хотя в этом описании показаны предпочтительные варианты осуществления изобретения, вышеописанные варианты осуществления предназначены только для иллюстрации изобретения, а не для ограничения каким-либо образом объема изобретения. Соответственно, следует принимать во внимание, что в тех случаях, когда признаки, упомянутые в прилагаемой формуле изобретения, сопровождаются ссылочными позициями, такие позиции включаются в состав описания исключительно с целью улучшения понимания формулы изобретения и никоим образом не ограничивают объем формулы изобретения. Кроме того, особенно следует отметить, что специалист в данной области техники может объединить технические меры различных вариантов осуществления изобретения. Поэтому объем изобретения определяется исключительно последующими пунктами формулы изобретения.
Реферат
Устройство содержит: носитель (2) для последовательного переноса и транспортировки по существу прямоугольных объектов (3) в направлении (11) транспортировки; измеритель (4), выполненный с возможностью измерения размера (5) объекта относительно по меньшей мере одного направления и/или измерения расстояния между последовательными объектами; и контроллер (7), выполненный с возможностью поворота по меньшей мере одного объекта и/или регулировки указанного расстояния; при этом измеритель выполнен с возможностью измерения внешнего размера боковой поверхности объекта; и контроллер выполнен с возможностью выравнивания боковой поверхности указанного объекта по существу по одной оси с направлением транспортировки. Улучшается выравнивание объектов. 3 н. и 15 з.п. ф-лы, 8 ил.
Комментарии