Шнековый конвейер и способ управления его работой - RU2368561C2
Код документа: RU2368561C2
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к шнековому конвейеру и способу управления его работой, подходящему для использования в качестве разгрузчика печи с подвижным подом и пр.
Уровень техники
Вообще шнековый конвейер транспортирует и подает транспортируемый объект, помещенный в корпус, путем вращения шнека. Однако если шнековым конвейером транспортируется сыпучее вещество, обладающее высокой липкостью, такое сыпучее вещество может отлагаться, прилипая к нижней части корпуса, что приводит к образованию твердого слежавшегося объекта. В результате этого кромка шнека может подвергаться износу при контакте со слежавшимся объектом, и эффективность транспортировки может снизиться из-за увеличения крутящего момента. В некоторых случаях опорное основание, такое как опорный блок, поддерживающий шнек, может быть повреждено, и транспортировка становится невозможной.
Для решения этой проблемы в известном шнековом конвейере шнековым конвейером срезают отложившийся и слежавшийся сыпучий материал, поднимая вал шнека во время его вращения для предотвращения образования твердого слежавшегося объекта.
Кроме того, в шнековом разгрузчике, используемом для разгрузки восстановленного железа из печи с подвижным подом с восстановительной атмосферой, применялся способ подъема шнека в соответствии с толщиной слежавшегося объекта, образовавшегося на подвижном поде. Соответственно можно предотвратить износ шнека и поддержать эффективность разгрузки, тем самым стабилизируя процесс.
Краткое описание изобретения
Однако в шнековом конвейере, в котором используется комбинация вращательного движения и движения подъема вала шнека, как описано выше, кромка шнека сжимает сыпучий материал, прилипший к нижней поверхности корпуса, когда шнек опускают. Это может способствовать слеживанию объекта.
Кроме того, при таком способе подъема шнекового разгрузчика в соответствии с толщиной слежавшегося объекта, образовавшегося на подвижном поде, необходимо оценить толщину слежавшегося объекта на основании количества порошка, который добавляют в печь с восстановительной атмосферой. Поэтому такой способ управления может быть неприменим для реального рабочего состояния. В частности, поскольку образование слежавшегося объекта может значительно меняться не только от количества порошка, подаваемого в печь с восстановительной атмосферой, но и от свойств материала и от рабочих условий такой печи, фактическая толщина слежавшегося объекта может отличаться от его предполагаемой толщины. Ввиду этого требуется дополнительная мощность для ненужного подъема шнекового разгрузчика, когда фактическая толщина слежавшегося объекта меньше предполагаемой, тогда как нагрузка на шнек возрастает, когда фактическая толщина слежавшегося объекта больше предполагаемой, что приводит к повышенному износу шнека и снижению эффективности транспортировки.
В соответствии с этим целью настоящего изобретения является предотвращение износа шнека и снижение эффективности транспортировки без необходимости в дополнительной мощности. Для достижения указанной цели применяется следующая конструкция.
Согласно настоящему изобретению обеспечивают способ управления работой шнекового конвейера, который содержит опорный узел для объекта, имеющий поддерживающую часть для поддержания транспортируемого объекта по меньшей мере с нижней стороны объекта, шнек, имеющий вал и лопасть, проходящую вокруг вала, при этом шнек расположен так, что лопасть расположена рядом с поддерживающей частью опорного узда, и приводной узел для перемещения транспортируемого объекта в направлении, параллельном валу шнека путем вращения лопасти шнека, и который имеет пространство для подъема шнека над шнеком, расположенное рядом с поддерживающей частью, при этом способ включает этапы: измерения нагрузки на приводном узле или величины, соответствующей нагрузке, и поднятия вала шнека в пространство для подъема шнека, когда нагрузка достигает заранее установленной верхней предельной величины для увеличения зазора между кромкой лопасти шнека и поддерживающей частью опорного узла для объекта.
Кроме того, согласно настоящему изобретению обеспечивают шнековый конвейер, содержащий опорный узел для объекта, имеющий поддерживающую часть для поддержания транспортируемого объекта по меньшей мере с нижней стороны объекта, шнек, имеющий вал и лопасть, проходящую вокруг вала, и расположенный так, что лопасть расположена рядом с поддерживающей частью опорного узла для объекта, приводной узел для перемещения транспортируемого объекта в направлении, параллельном валу шнека, путем вращения лопасти шнека, пространство для подъема шнека, обеспеченное над шнеком, находящимся рядом с поддерживающей частью, узел для измерения нагрузки на приводном узле, узел управления для вывода заданного сигнала, когда нагрузка достигнет заранее установленной верхней предельной величины, и узел подъема вала шнека в ответ на заданный сигнал для увеличения зазора между кромкой лопасти шнека и поддерживающей частью опорного узла для объекта.
Предпочтительно опорный узел для объекта содержит корпус, при этом шнек установлен в корпусе, и сечение корпуса в направлении, перпендикулярном направлению транспортировки объекта, имеет форму, имеющую донную часть для окружения нижней и боковых сторон транспортируемого объекта, и пространство для подъема шнека, расположенное над донной частью. В качестве альтернативы корпус может содержать плоский элемент, выполненный с возможностью перемещения по существу горизонтально в направлении, по существу перпендикулярном направлению транспортировки объекта.
Следует отметить, что вышеупомянутая "донная часть корпуса" подразумевает поверхность участка, контактирующую с транспортируемым объектом или поверхность участка, возможно контактирующую с лопастью шнека, и это не ограничивается участком в самом нижнем положении. В частности, для донной части, имеющей форму, окружающую нижнюю и боковые стороны транспортируемого объекта, в донную часть может включаться не только часть в самом нижнем положении, но и определенная часть, расположенная на верхней стороне самого нижнего участка.
Когда шнековый конвейер установлен в печи с подвижным подом, шнек может располагаться рядом с верхней поверхностью подвижного пода так, что верхняя поверхность подвижного пода может служить поддерживающей частью опорного узла для объекта. Следует отметить, что "верхняя поверхность подвижного пода" подразумевает поверхность, выполненную из огнеупора или подобного материала. Когда объект, подвергаемый термообработке, устанавливают на поду или если на поду образуется нагар, то лопасть шнека может контактировать с таким объектом или нагаром.
В настоящем изобретении, когда приводным узлом является, например, электродвигатель, можно измерять величину крутящего момента или электрического тока, которая является величиной, соответствующей нагрузке на электродвигатель.
Например, если вал шнека поддерживается на обоих своих концах, шнек можно поднимать, поднимая один из его концов или поднимая оба его конца поочередно, один за другим.
Краткое описание чертежей
Фиг.1 представляет собой вид, схематически показывающий шнековый конвейер согласно первому варианту настоящего изобретения, где Фиг.1(а) - вид сбоку, а Фиг.1(b) - поперечное сечение по линии Х-Х.
Фиг.2 представляет собой блок-схему способа управления работой шнекового конвейера согласно первому варианту настоящего изобретения.
Фиг.3 представляет собой схематический вид, показывающий шнековый конвейер согласно второму варианту настоящего изобретения, где Фиг.3(а) - продольное сечение, а Фиг.3(b) - поперечное сечение по линии Х-Х.
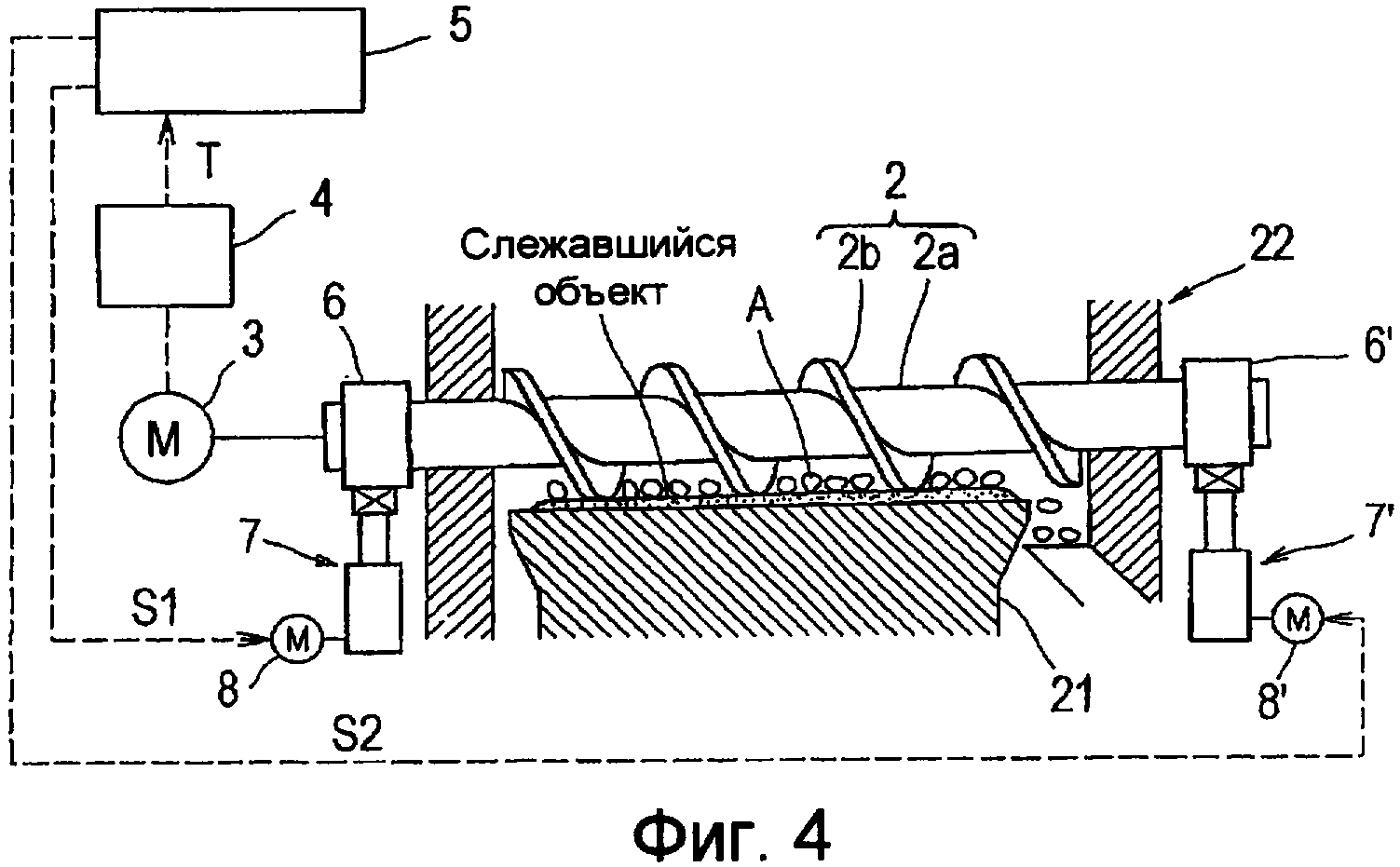
Фиг.4 представляет собой вид сбоку, схематически показывающий шнековый разгрузчик согласно третьему варианту настоящего изобретения.
Фиг.5 представляет собой график изменений крутящего момента электродвигателя во времени.
Описание предпочтительного варианта осуществления настоящего изобретения
Далее следует описание вариантов настоящего изобретения со ссылками на прилагаемые чертежи.
Первый вариант
На Фиг.1 схематично показан шнековый конвейер согласно первому варианту настоящего изобретения. Как показано на Фиг.1а, шнековый конвейер содержит корпус 1 (опорный узел для объекта), шнек 2, имеющий вал 2а и лопасть 2b, установленную вокруг вала 2а шнека, электродвигатель 3 (приводной узел) для приведения во вращение вала 2а шнека, устройство 4 для измерения крутящего момента как нагрузки на электродвигатель 3, контроллер 5 (узел управления) для вывода заданного сигнала, когда крутящий момент, измеренный устройством 4 для измерения крутящего момента, достигнет заранее установленной верхней предельной величины, и подъемники 7 и 7' шнека (узлы подъема шнека) для подъема вала 2а шнека в ответ на сигнал, выданный контроллером 5. Шнек 2 установлен в корпусе 1.
Как показано на Фиг.1b, поперечное сечение корпуса 1, перпендикулярное направлению транспортируемого объекта А, имеет такую форму, чтобы быть закрытым в нижней части и открытым в верхней части корпуса 1 (например, U-образным, как показано на чертеже). Закрытая часть образует донную часть 1а, имеющую полукруглое поперечное сечение. Донная часть 1а поддерживает транспортируемый объект А, окружая нижнюю и боковые стороны объекта А. Кроме того, корпус 1 имеет пространство, позволяющее поднимать шнек 2, которое расположено над донной частью 1а.
Шнек 2 установлен в корпусе в таком положении, что нижняя кромка лопасти 2b расположена рядом с донной частью 1а корпуса 1. Когда вал 2а шнека 2 вращается под воздействием электродвигателя 3, лопасть 2b вращается вместе с валом 2а шнека и транспортируемый объект А, расположенный в донной части 1а, транспортируется в направлении, параллельном валу 2а шнека.
На обоих концах вала 2а шнека установлены опорные блоки 6 и 6'. Подъемники 7 и 7' шнека расположены между основанием 9 шнекового конвейера и опорными блоками 6 и 6'. Более конкретно, подъемники 7 и 7' шнека поддерживают оба конца вала 2а шнека с возможностью вращения, при этом между ними расположены опорные блоки 6 и 6'. Основные корпуса подъемников 7 и 7' шнека могут расширяться и сжиматься в вертикальном направлении. Когда основные корпуса приводятся в движение электродвигателями 8 и 8' для расширения и сжатия, вал шнека поднимается вместе с опорными блоками 6 и 6'.
Контролер 5 выводит на электродвигатели 8 и 8' заданный сигнал, соответствующий нагрузке на электродвигатель 3, определенной устройством 4 для измерения крутящего момента так, чтобы управлять приводом подъемников 7, и 7' шнека, т.е., чтобы управлять подъемом вала 2а шнека.
Далее следует описание последовательности операций управления работой шнекового конвейера со ссылками на блок-схему, показанную на Фиг.2.
(1) Перед работой шнекового конвейера, контроллер 5 задает верхнее предельное значение Tmax крутящего момента Т электродвигателя 3, и величину подъема Δh вала 2а шнека.
(2) Во время работы шнекового конвейера измерительное устройство 4 для измерения крутящего момента измеряет крутящий момент Т электродвигателя 3. Следует отметить, что крутящий момент можно измерять непрерывно или периодически, через каждый заданный промежуток времени.
(3) Контроллер 5 получает данные измеренной величины крутящего момента Т и затем сравнивает полученную величину крутящего момента Т с верхним предельным значением Tmax.
(4) Контроллер 5 выдает сигнал S1 на один электродвигатель 8 только когда T≥Tmax на шаге (3).
(5) Электродвигатель 8, принявший сигнал S1, автоматически приводится в движение и поднимает один конец вала 2а шнека вместе с опорным блоком 6 на заранее заданную величину Δh.
(6) Крутящий момент непрерывно или периодически измеряется даже после того, как один конец вала 2а шнека поднят, как описано выше.
(7) Контроллер 5 получает величину измеренного крутящего момента Т и сравнивает эту величину Т с верхним предельным значением Tmax.
(8) Контроллер 5 выдает сигнал S2 на другой электродвигатель 8' только когда
T≥Tmax на шаге (7).
(9) Электродвигатель 8', принявший сигнал S2, автоматически приводится в движение и поднимает другой конец вала 2а шнека вместе с опорным блоком 6' на заранее заданную величину Δh.
(10) Путем повторения операций (2)-(9) концы вала 2а шнека поочередно поднимаются в соответствии с ростом нагрузки на электродвигатель 3.
Хотя в качестве приводного узла для вращения шнека 2 описан электродвигатель 3, таким приводным узлом может быть и двигатель внутреннего сгорания или паровая турбина.
Кроме того, нагрузка на электродвигатель 3 не ограничивается крутящим моментом Т. Например, можно измерять величину электрического тока. В качестве альтернативы контактную нагрузку между шнеком 2 и корпусом 1 с расположенным между ними слежавшимся объектом можно измерять как величину, соответствующую нагрузке на электродвигатель 3.
Хотя на Фиг.2 показан пример, в котором концы вала 2а шнека поднимают поочередно, один конец вала 2а шнека можно поднимать многократно, пока этот конец не достигнет заданной высоты, либо оба конца вала 2а шнека можно поднимать одновременно.
Хотя на Фиг.2 показан пример, в котором один конец вала 2а шнека поднимают на заранее заданную величину Δh, например, когда T≥Tmax, величину подъема можно изменять в соответствии с величиной избыточного крутящего момента (Т-Tmax) относительно верхнего предельного значения Tmax или в соответствии с положением вала 2а шнека. В этом случае контроллер вместо вывода сигналов S1 и S2 может предпочтительно выводить сигналы, содержащие информацию о величине подъема, чтобы подъемники 7 и 7' шнека, включая электродвигатели 8 и 8', могли работать в сочетании с датчиками положения, установленными на подъемниках 7 и 7', которые определяют положение подъемников 7 и 7' шнека в ответ на получение таких сигналов.
Кроме того, приводами таких подъемников 7 и 7' шнека могут быть электрические цепные приводы, гидравлические цилиндры или подобные, заменяющие электродвигатели 8 и 8'.
Поперечное сечение корпуса 1, перпендикулярное направлению транспортировки, не ограничено U-образной формой, показанной на чертежах. Оно может быть V-образным. Кроме того, верхняя сторона корпуса 1 не ограничивается тем, чтобы быть открытой, эта верхняя сторона может быть закрытой так, что сечение корпуса 1 принимает форму вертикально удлиненного эллипса, при условии, что корпус 1 имеет пространство (зазор), которое позволяет поднимать шнек 2. В любом случае транспортируемый объект можно стабильно транспортировать, поскольку нижняя часть корпуса 1 окружает нижнюю и боковые стороны транспортируемого объекта.
Второй вариант
На Фиг.3 показан шнековый конвейер согласно второму варианту настоящего изобретения. Этот конвейер содержит плоский элемент, который перемещается по существу горизонтально в направлении, по существу перпендикулярном направлению транспортируемого объекта А (т.е. направлению, параллельному валу 2а шнека), который служит поддерживающим узлом вместо корпуса 1 на Фиг.1. В частности, в качестве примера такого плоского элемента конвейер может содержать ленточный питатель 11 для поддержания на ленте транспортируемого объекта А и транспортировки его в направлении движения ленты. В шнековом конвейере шнек 2 расположен так, что вал 2а шнека 2 проходит в направлении по существу ортогональном направлению движения ленты ленточного питателя 11, а лопасть 2b шнека расположена рядом с верхней поверхностью ленты ленточного питателя 11. Такой конвейер используется для соскабливания сыпучего объекта А, транспортируемого из бункера 12 ленточным питателем 12, используя шнек 2, и для подачи объекта на следующий технологический процесс.
Используя способ управления подобный тому, который применяется в первом варианте, конвейер согласно второму варианту настоящего изобретения может предотвратить износ лопасти шнека и снизить эффективности транспортировки из-за слежавшегося объекта, образованного на ленточном питателе 11, без необходимости в использовании добавочной мощности, поднимая шнек 2 в соответствии с нагрузкой на электродвигатель 3 или с величиной, соответствующей такой нагрузке (крутящий момент, величина электрического тока или подобные).
Третий вариант
В этом варианте шнековый конвейер согласно настоящему изобретению используется как разгрузчик для печи 22 с подвижным подом. Верхняя поверхность подвижного пода 21, который перемещается в печи 22, образует поддерживающий участок опорного узла для объекта. В частности, шнековый разгрузчик содержит шнек 2, расположенный так, что лопасть 2b шнека расположена рядом с верхней поверхностью подвижного пода 21. Когда лопасть 2b шнека вращается, объект А, подлежащий термической обработке (транспортируемый объект), расположенный на подвижном поде 21 и подвергающийся термической обработке во время движения пода внутри печи 22, транспортируется в направлении, параллельном валу 2а шнека, и выгружается за пределы печи 22.
Используя способ управления, подобный тому, который применен в первом и втором вариантах, конвейер согласно третьему варианту настоящего изобретения может предотвратить износ винта шнека и снизить эффективность транспортировки из-за слежавшегося объекта, образованного на подвижном поде 21, без необходимости в использовании добавочной мощности, поднимая шнек 2 в соответствии с нагрузкой на электродвигатель 3 (крутящий момент, величина электрического тока или подобные).
ПРИМЕР 1
Шнековый конвейер и способ управления его работой согласно первому варианту настоящего изобретения, показанному на Фиг.1, были применены в спиральном классификаторе, в котором шлам, содержащий оксид железа, соскабливается шнеком из желоба, содержащего порошок оксида железа.
До применения настоящего изобретения, поскольку зазор между корпусом 1 и шнеком 2 во время этой операции должен быть постоянным, лопасть 2b шнека серьезно изнашивалась ввиду слежавшегося шлама оксида железа, слежавшегося на внутренней поверхности корпуса 1. Шнек 2 необходимо было заменять каждые 6 месяцев или ремонтировать лопасть 2b наплавкой. По мере увеличения количества слежавшегося объекта постепенно возрастает нагрузка на шнек 2, что приводит к ухудшению способности к транспортировке. Поэтому опорные блоки 6 и 6' повреждались.
Наоборот, после применения настоящего изобретения лопасть 2b шнека оказалась защищена от износа, хотя на внутренней поверхности корпуса 1 продолжал образовываться слежавшийся объект. Соответственно, шнек 2 смог проработать без ремонта один год или дольше. Кроме того, надлежащая работа продолжалась в течение длительного времени без ухудшения способности транспортировки. Более того, поскольку чрезмерное увеличение нагрузки (крутящего момента, величины электрического тока или подобных) на электродвигателе 3 не возникает, оказалось возможным существенно снизить потребление энергии по сравнению с ситуацией до применения настоящего изобретения.
На Фиг.5 схематически показано изменение крутящего момента Т электродвигателя 3 во времени до и после применения настоящего изобретения. До применения настоящего изобретения крутящий момент Т линейно возрастал до значения, когда работа становилась невозможной. Наоборот, после применения настоящего изобретения крутящий момент Т постоянно поддерживался при верхнем предельном значении Tmax или менее.
В настоящем примере диапазон подъема шнека 2 составлял 30 мм. Величина подъема Δh шнека 2, когда крутящий момент достигает верхней предельной величины Tmax, составляла 5 мм. В этом случае шнек 2 достигал верхнего предела диапазона подъема приблизительно за две недели. Поэтому оператору приходилось останавливать работу и удалять слежавшийся объект вручную или нужно было размягчать слежавшийся объект с использованием размягчающего вещества или подобного и затем восстанавливать положение шнека 2 у нижнего предельного положения диапазона подъема. Когда Δh изменили до 2 мм, шнек 2 не доходил до верхнего предела диапазона подъема при продолжении работы в течение 40 дней. Положение шнека 2 нужно было восстанавливать на нижнем пределе диапазона подъема при каждом обычном периодическом обслуживании. Кроме того, когда Δh изменили на 0,5 мм или менее, максимальное время, затрачиваемое шнеком 2 на подъем до верхнего предельного положения диапазона подъема, можно было продлить до 3 месяцев.
Чем меньше Δh, тем больше период, за который шнек 2 достигает верхнего предела диапазона подъема. Это объясняется следующим. Даже когда лопасть 2b шнека контактирует со слежавшимся объектом, крутящий момент Т не сразу достигает верхней предельной величины Tmax. Можно предположить, что лопасть 2b шнека в течение определенного времени сжимает или срезает слежавшийся объект и, соответственно, крутящий момент Т может увеличиваться постепенно, пока не достигнет предельной величины Tmax. Поэтому значение Δh задается небольшим, чтобы шнек поднимался понемногу, чтобы новый слежавшийся объект, прилипающий к уже существующему слежавшемуся объекту, можно было срезать, пока он еще относительно мягок. Соответственно, можно предотвратить нарастание слежавшегося объекта.
ПРИМЕР 2
Шнековый конвейер и способ управления его работой согласно второму варианту, показанному на Фиг.3, использовались в рудном питателе, который срезает порошковую руду. Как и в примере 1, был устранен износ шнека 2, надлежащая работа могла продолжаться длительное время без снижения способности транспортировки, и потребление энергии заметно сократилось по сравнению с ситуацией до применения настоящего изобретения.
ПРИМЕР 3
Шнековый разгрузчик и способ управления его работой согласно третьему варианту настоящего изобретения, показанному на Фиг.4, использовались в разгрузчике восстановленного железа для вращающейся печи с восстановительной атмосферой, которая выступала в роли печи с подвижным подом для производства восстановленного железа. Как и в Примерах 1 и 2 был устранен износ шнека 2, и надлежащая работа могла продолжаться длительное время без снижения способности транспортировки, и потребление энергии заметно сократилось по сравнению с ситуацией до применения настоящего изобретения.
Промышленная применимость
Настоящее изобретение может эффективно использоваться для транспортировки объектов разных типов с помощью шнека.
Реферат
В шнековом конвейере измеряется нагрузка на электродвигатель (3) или величина, соответствующая этой нагрузке. При достижении этой величиной или превышении предустановленного значения нагрузки вал (2а) шнека поднимают для увеличения зазора между кромкой лопасти (2b) шнека и нижней частью кожуха (1). Предотвращается износ шнека и поддерживается эффективность разгрузки. 3 н. и 7 з.п. ф-лы, 5 ил.
Формула
измеряют нагрузку на приводном узле или величину, соответствующую нагрузке, и
поднимают вал шнека в пространство для подъема шнека, когда нагрузка достигает заранее установленной верхней предельной величины для увеличения зазора между кромкой лопасти шнека и поддерживающей частью опорного узла для объекта,
причем приводной узел представляет собой электродвигатель, а
крутящий момент или величину электрического тока электродвигателя измеряют как величину, соответствующую нагрузке на электродвигатель.
опорный узел для объекта содержит корпус, при этом шнек расположен в корпусе, и
поперечное сечение корпуса, перпендикулярное направлению транспортировки транспортируемого объекта, имеет форму, имеющую донную часть для окружения нижней стороны и боковых сторон транспортируемого объекта, при этом пространство для подъема шнека расположено над донной частью.
при этом шнек установлен рядом с верхней поверхностью подвижного пода, и
верхняя поверхность подвижного пода служит в качестве поддерживающей части опорного узла для объекта.
вал шнека поддерживают на обоих концах вала шнека, и вал шнека поднимают, поднимая один из концов вала шнека, или поднимая оба конца вала шнека поочередно.
опорный узел для объекта, имеющий поддерживающую часть для поддержания транспортируемого объекта по меньшей мере с нижней стороны объекта,
шнек, имеющий вал и лопасть, проходящую вокруг вала, и расположенный так, что лопасть шнека расположена рядом с поддерживающей частью опорного узла для объекта,
приводной узел для перемещения транспортируемого объекта в направлении, параллельном валу шнека путем вращения винта шнека,
пространство для подъема шнека, обеспеченное над шнеком, расположенным рядом с поддерживающей частью,
узел для измерения нагрузки на приводном узле,
узел управления для вывода заданного сигнала, когда нагрузка достигнет заранее заданного верхнего предельного значения, и
узел для подъема вала шнека в ответ на заданный сигнал, для увеличения зазора между кромкой лопасти шнека и поддерживающей частью опорного узла для объекта,
при этом приводной узел представляет собой электродвигатель, а
узел для измерения нагрузки выполнен с возможностью измерения выходного крутящего момента или величины электрического тока на электродвигателе.
опорный узел для объекта содержит корпус, при этом шнек расположен в корпусе, и
поперечное сечение корпуса, перпендикулярное направлению транспортировки объекта, имеет форму, имеющую донную часть для окружения нижней стороны и боковых сторон транспортируемого объекта, при этом пространство для подъема шнека расположено над донной частью.
шнековый конвейер по п.6 установлен в качестве шнекового разгрузчика для выгрузки объекта, подлежащего термической обработке, и расположенного на верхней поверхности подвижного пода, и подвергающегося термической обработке во время перемещения объекта в печи с подвижным подом,
шнек расположен рядом с верхней поверхностью подвижного пода, и
верхняя поверхность подвижного пода служит в качестве поддерживающей части опорного узла для объекта.
Комментарии