Модульный транспортер для транспортировки и распределения грузов - RU2038274C1
Код документа: RU2038274C1
Чертежи




Описание
Изобретение относится к модульной системе транспортировки и распределения грузов различного вида, формы, поверхности, массы и консистенции.
Известны модульные системы транспортировки, в которых грузы транспортируются с помощью лент со стрелками, роликами, поперечными ленточными участками и подаются в разные конечные точки. При этом грузы должны соответствовать особенностям ленты. Надежная транспортировка и распределение без перегрузочных операций в значительной степени зависят от показателей трения груза относительно ленты. Рыхление и легкие грузы, такие как бумага, неупакованные газеты и журналы, могут падать с транспортерной ленты. Такие грузы бывают также сложны в обращении на стрелках, разветвлениях и при разгрузке. Грузы, упакованные в пластик, могут прилипать к ленте. Кроме того, в установках, использующих направляющие в виде плоскостей скольжения с боков транспортерной ленты, могут возникнуть смещения транспортируемых грузов этими направляющими средствами, что вызывает опасность повреждения грузов.
Известны системы транспортировки, основанные на движении контейнеров по рельсам, роликам или колесам или снабженные опрокидывающимися поддонами. Однако контейнеры или поддоны требуют обратной транспортировки и при разгрузке транспортируемого груза под действием собственной тяжести на груз воздействуют повышенные усилия.
Наиболее близким к предлагаемому является модульный транспортер, в котором каждый транспортирующий элемент для выгрузки транспортируемого материала установлен с возможностью поворота относительно предыдущего элемента. Вращение происходит таким образом, что каждый элемент целиком вращается вокруг задней точки вращения, причем на пути транспортировки между повернутым элементом и предыдущим элементом образуется зазор. Для перекрытия зазора между остальными элементами транспортировки предусмотрены ролики.
Задача предлагаемого изобретения состоит в создании такой системы транспортировки, в которой происходит заданное и надежное направление груза в ходе всего процесса транспортировки и распределения, соприкосновение груза с направляющими средствами и стрелками и трение о них сводится к минимуму, не возникает неопределенного положения груза при разгрузке, а влияние особенностей поверхности груза на процесс транспортировки и распределения минимально.
Исключение относительного движения между материалом и транспортным средством и определенное направление материала достигаются тем, что транспортная система состоит из транспортирующих модулей, в которых параллельно донному средству транспортировки установлены два боковых направляющих элемента; донное средство передвижения и боковые направляющие элементы смонтированы на раме; рама каждого транспортирующего модуля в движущемся транспортном средстве перемещается таким образом, что материал может выгружаться из транспортирующего модуля, причем боковые направляющие выполнены с возможностью поворота вокруг неподвижных задних осей и модули, соответственно, стыкуются с промежуточным элементом и образуют сквозной транспортный путь.
Преимущество предлагаемого модульного транспортера по сравнению с известными заключается в том, что и во время процесса выгрузки транспортный путь остается сквозным.
На фиг. 1-10 изображен модульный транспортер и его элементы конструкции.
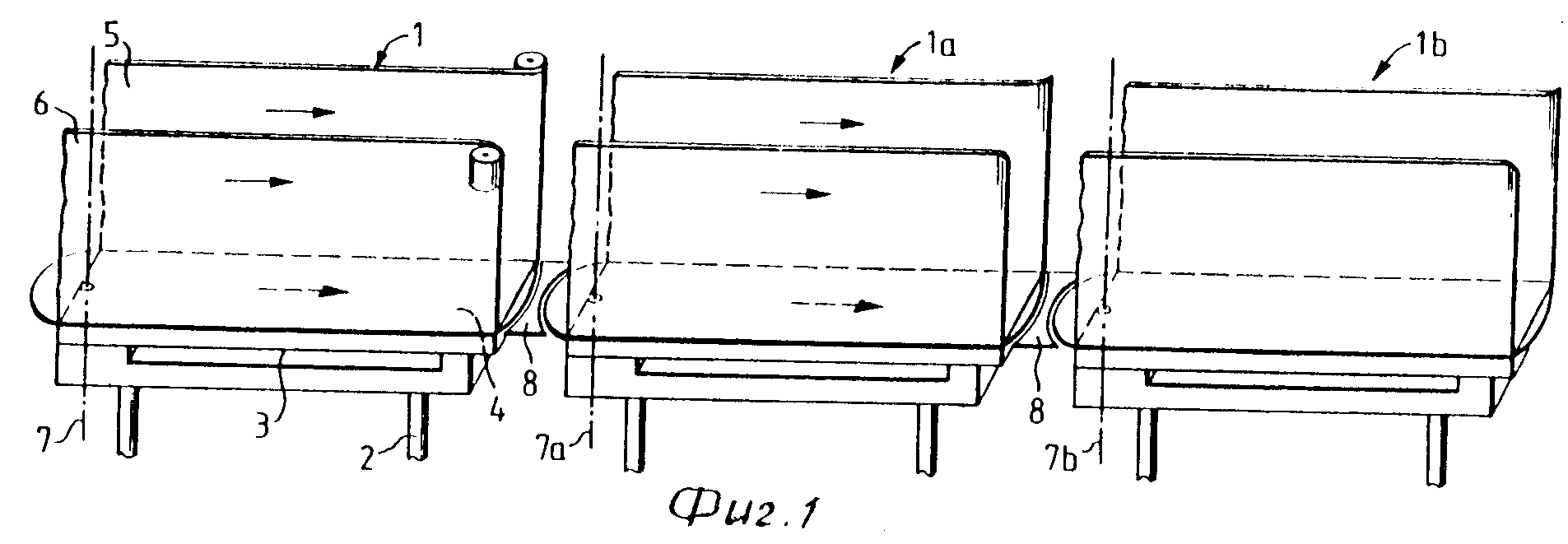
На фиг. 1 показана транспортирующая система, состоящая из трех последовательно соединенных друг с другом транспортных модулей 1, 1a и 1b. Движение осуществляется в направлении от модуля 1 к модулю 1a. Транспортный модуль 1 состоит из основания 2, на котором смонтирована вращающаяся рама 3. В качестве донного транспортного средства используется нижняя лента 4, боковые ленты 5 и 6 представляют собой боковые направляющие элементы.
Рамная опора 3 поворачивается относительно основания 2 вокруг оси 7. Модули 1 и 1a соединены перемычкой 8, выполняющей роль плоской опоры скольжения. Перемычка 8 выполнена таким образом, чтобы обеспечивать беспрепятственный поворот модуля вокруг оси 7 и поворот модуля 1a вокруг оси 7a. Если модуль 1 не повернут, происходит передача груза через перемычку 8 от модуля 1 к модулю 1a. Для предотвращения дополнительного ускорения при переходе груза от одного модуля к другому ленты всех модулей движутся примерно с одинаковой скоростью. Для предотвращения трения между грузом и транспортером боковые транспортерные ленты 5 и 6 каждого модуля тоже движутся синхронно с соответствующей нижней лентой 4.
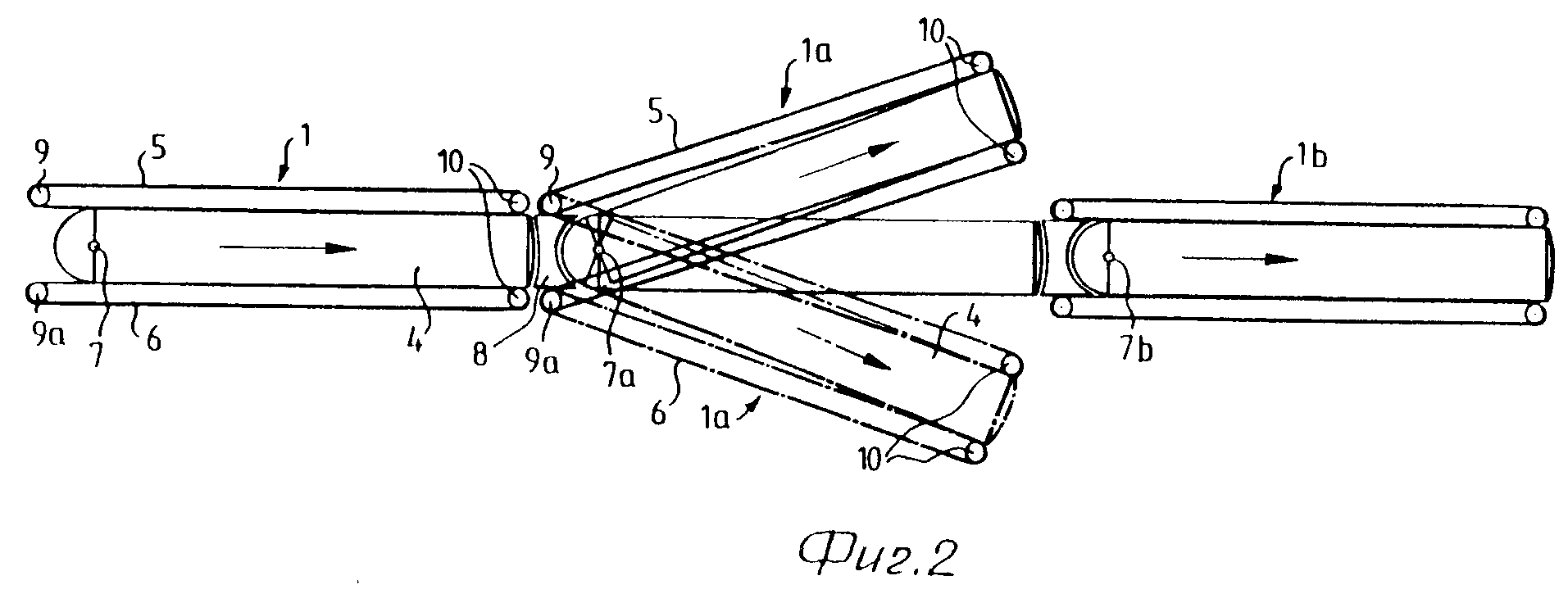
На фиг. 2 показан транспортер, вид сверху. Здесь показаны неподвижные ходовые ролики 9 и 9a модулей 1 и 1a для боковых лент 5 и 6. Ролики 10 установлены в рамной опоре 3 так, чтобы при повороте вокруг оси 7 не происходило изменение натяжения или скорости движения боковых лент 5 и 6 (фиг. 3).
Передача от модуля 1 к модулю 1a происходит в том случае, когда при движении лент модули 1 и 1a пристыкованы к перемычке и образуют сквозной путь перемещения. Разгрузка груза осуществляется благодаря тому, что транспортирующий модуль (на фиг. 2 модуль 1a) поворачивается на оси 7. Разгружаемый груз проходит над перемычкой 8 с первого модуля на второй повернутый модуль и подается дальше к открытому концу лентами этого модуля. На фиг. 1 и 2 показан поворот, происходящий в одной плоскости, однако может осуществляться поворот вверх или вниз для выгрузки, что достигается оснащением боковых лент такой же перемычкой 8, которая на фиг. 3 предусмотрена для нижней ленты.
Фиг. 3 поясняет условия поворота модуля 1b вокруг оси 7b. Каждая перемычка 8 имеет участок X с поверхностью в виде кругового сегмента, форма которого согласуется с формой вогнутой поверхности неподвижного участка Y. Благодаря этому возможно свободное перемещение вокруг оси 7b поворота. Вторая вогнутая поверхность участка Y взаимодействует с полукруглым или примерно полукруглым участком Z, что также способствует свободному повороту вокруг оси 7b. Нижняя лента движется с узким зазором от краев участков X и Z перемычки 8. Преимущество такого выполнения участков X, Y, Z перемычки или соединительной детали состоит в том, что при повороте не происходит изменения зазора между транспортирующими элементами. Для уменьшения трения между грузом и перемычкой 8 последняя имеет гладкую и/или снабженную подходящим покрытием поверхность. Поскольку задние ролики 9 и 9a боковых лент при повороте неподвижны, предотвращается изменение зазора между боковыми стенками модулей 1a и 1b. При повороте нижняя лента должна перемещаться, не изменяя своего положения относительно оси поворота, для предотвращения смещений поверхности ленты. Изменение геометрических соотношений при повороте требует подпружиненной установки передних роликов. На фиг. 3 показаны пружинные элементы 11. От них можно отказаться в том случае, если параллельностью передних роликов обеспечивается направление боковых лент в форме параллелограмма. Привод транспортерных лент и модулей можно осуществлять по-разному. В одном из вариантов каждая лента содержит индивидуальный регулируемый привод, причем регулировкой достигается также синхронность движения трех лент каждого модуля. Посредством регулировки обеспечивается и синхронность лент или привода остальных модулей. В другом варианте предусматривается централизованный привод каждого модуля посредством цепей, ремней и шестерен, причем для каждого модуля используется только один приводной двигатель.
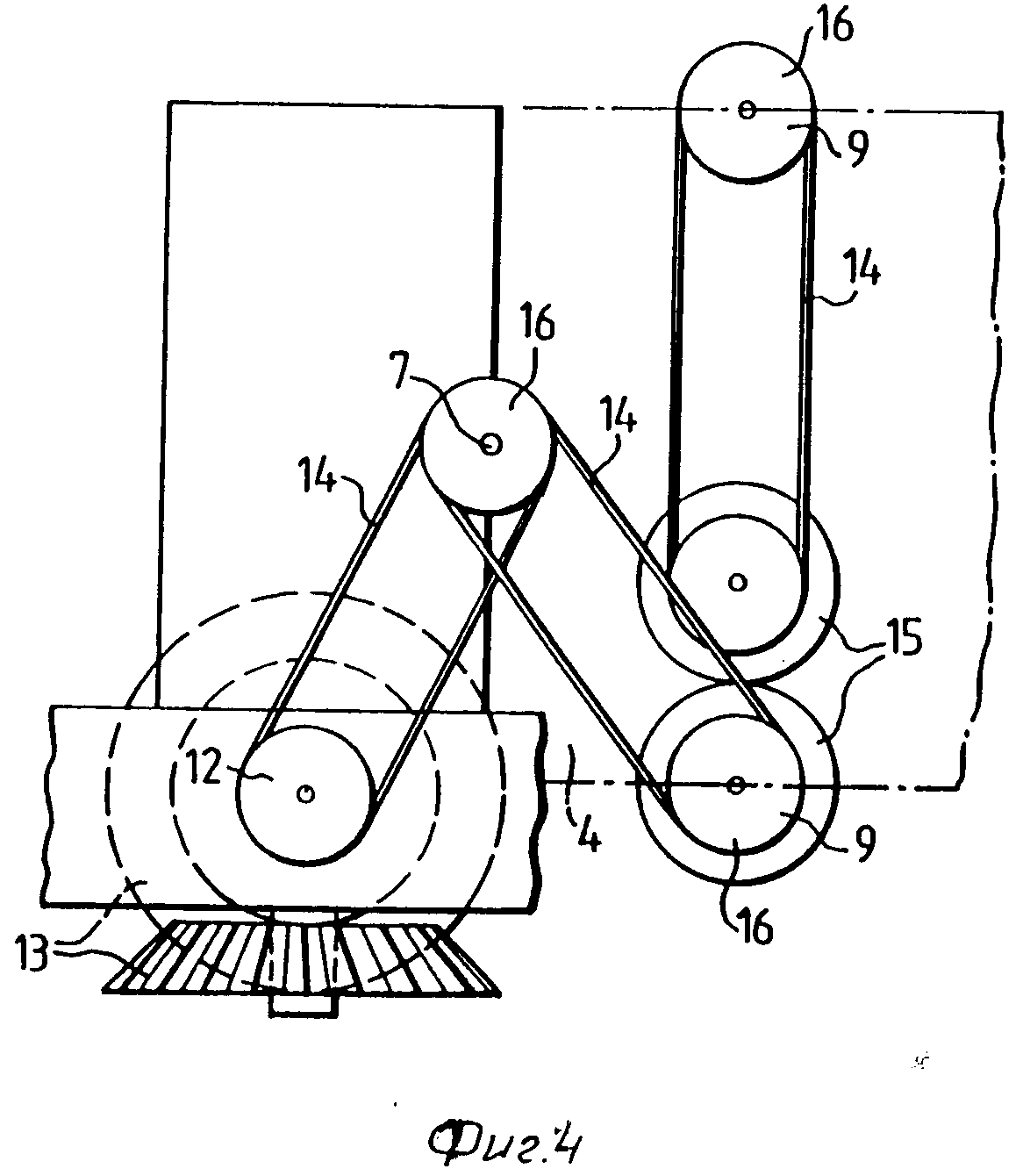
На фиг. 4 показана передача для синхронного привода нижней и боковых лент. Ролики для нижней ленты обеспечивают вращение, необходимое для поворота вокруг центральной оси 7. На фиг. 4 показаны приводной вал 12, конические шестерни 13 для привода роликов нижней ленты, зубчатые ремни 14, цилиндрические шестерни 15 и зубчато-ременные шкивы 16 для привода боковых роликов 9 и 9a.
На фиг. 5 показан вариант выполнения модульного транспортера, в котором с помощью двигателей 17, 17a и 17b, зубчатых цепей 18, 18a и 18b и шестерен 19, 19a и 19b достигается синхронизация индивидуально приводимых модулей 1, 1a и 1b.
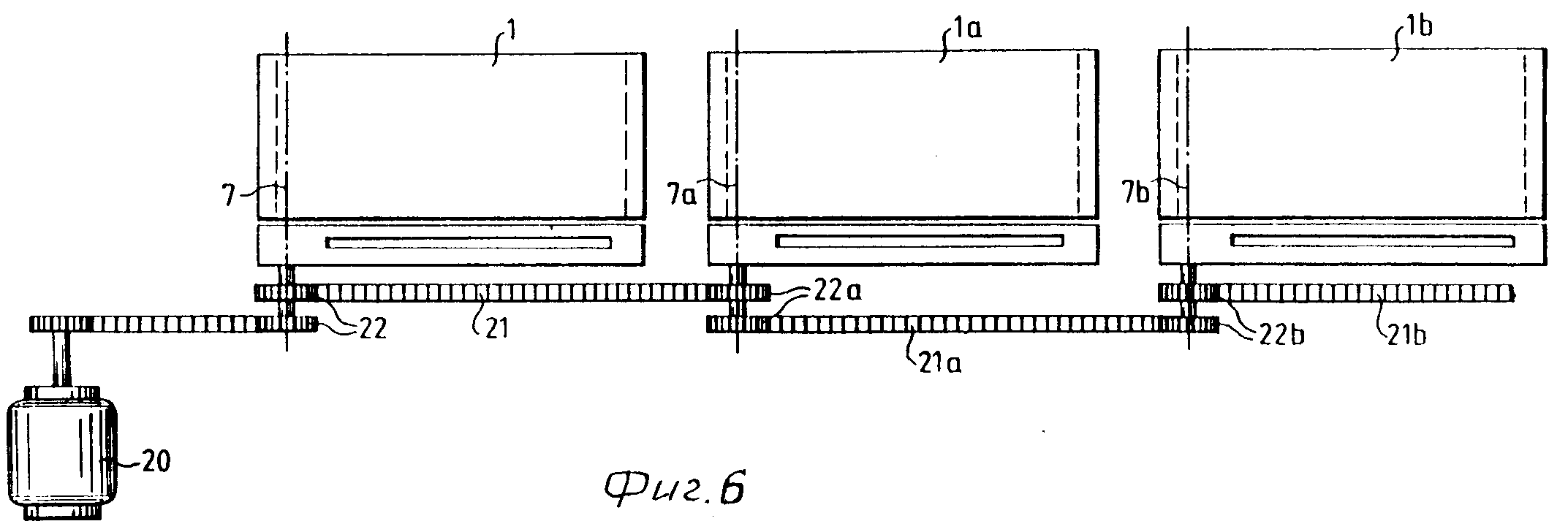
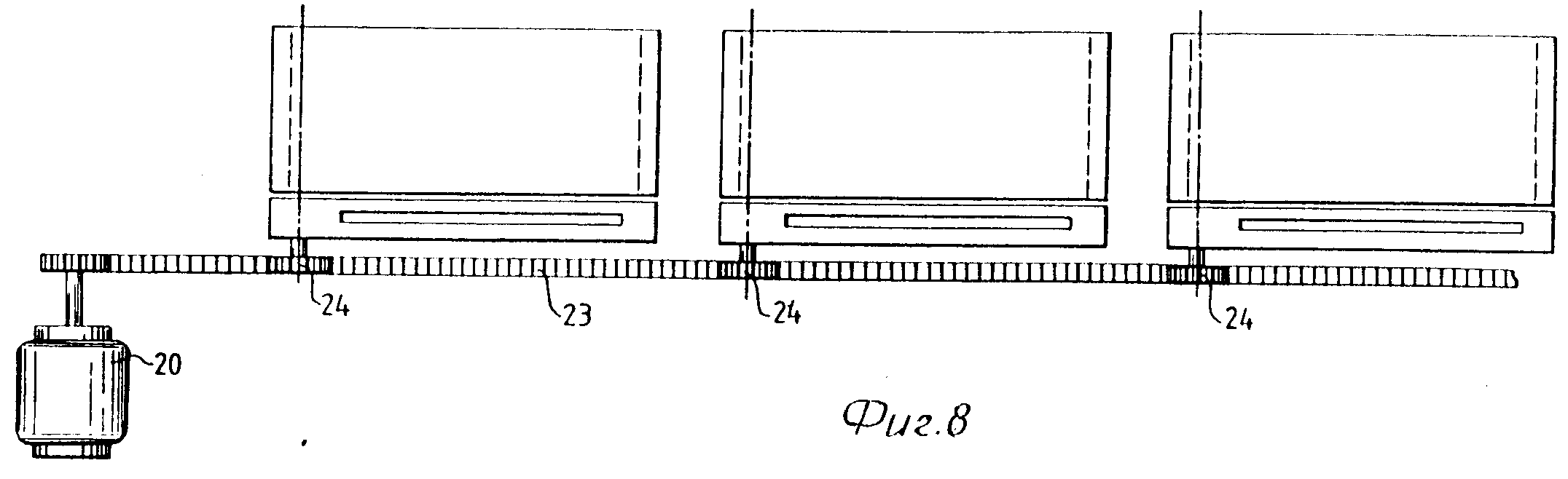
На фиг. 6 и 7 показаны другие варианты выполнения модулей 1, 1a и 1b с централизованным приводом. Здесь показаны центральный приводной двигатель 20, зубчатые цепи 21, 21a, 21b и 23 и соединенные с ними звездочками 22, 22a, 22b и 24.
На фиг. 8 показан вариант выполнения модульного транспортера. Для предотвращения попадания, например, тонкой бумаги между следующими по вертикали друг за другом лентами 4 и 5 или 6 на нижних краях вертикальных роликов 9 и 10 устанавливается упругая бахрома или щетки 25. Они могут устанавливаться и на нижнем краю плоских боковых ограничителей, расположенных за боковыми лентами, и в обоих случаях действуют как упругое уплотнение между боковыми лентами и нижней лентой.
Для увеличения давления боковых лент на нижнюю ленту и тем самым повышения плотности прижима боковых лент к нижней можно выполнить ролики бочкообразными, благодаря чему осуществляется давление нижних кромок боковых лент на нижнюю ленту. На фиг. 9 показан бочкообразный ролик 26 для нижней ленты.
На фиг. 10 показан вариант выполнения модульного транспортера, при котором ленты 27 встроены в нижнюю пластину Z перемычки 8. Ленты 27 предназначены для транспортировки в области перемычки 8. Благодаря подходящей скорости лент 27 можно компенсировать возможное трение груза. Тот же эффект достигается роликами 28, встроенными в участок Z перемычки 8 (фиг. 11).
В упрощенных вариантах выполнения предлагаемого транспортера можно отказаться от принудительно приводимых боковых лент и заменить их свободно движущимися лентами или направляющими скольжения. Кроме того, в устройстве, в котором предусмотрено отклонение груза вниз или вверх, боковые ленты могут быть установлены неподвижно, а поворачивается вниз или вверх только нижняя лента.
Предлагаемое изобретение показано на примере определенного отклоняющего механизма, но можно использовать и другие варианты этого механизма в транспортере. Кроме того, транспортерные ленты можно заменить принудительно приводимыми роликами или иными транспортирующими механизмами, например качающимся конвейером.
Реферат
Использование: для транспортировки и распределения дискретных или сплошных грузов посредством транспортерных лент. Сущность изобретения: модульный транспортер для транспортировки и распределения грузов состоит по меньшей мере из двух расположенных последовательно и установленных на основании транспортирующих модулей, каждый из которых имеет раму, установленную с возможностью перемещения относительно основания и других транспортирующих модулей для разгрузки груза из каждого модуля, смонтированных на раме донного транспортирующего средства и двух боковых направляющих и расположенного между модулями промежуточного элемента. Рама с расположенными на ней донным транспортирующим средством и боковыми направляющими установлена с возможностью поворота вокруг оси, неподвижно установленной в задней части рамы. Модули состыкованы промежуточным элементом с образованием сплошной транспортирующей дорожки. 10 з.п.ф-лы, 11 ил.
Комментарии