Транспортное устройство для перевозки пассажиров - SU610484A3
Код документа: SU610484A3
Чертежи




Описание
(54) ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕВОЗКИ ПАССАЖИРОВ
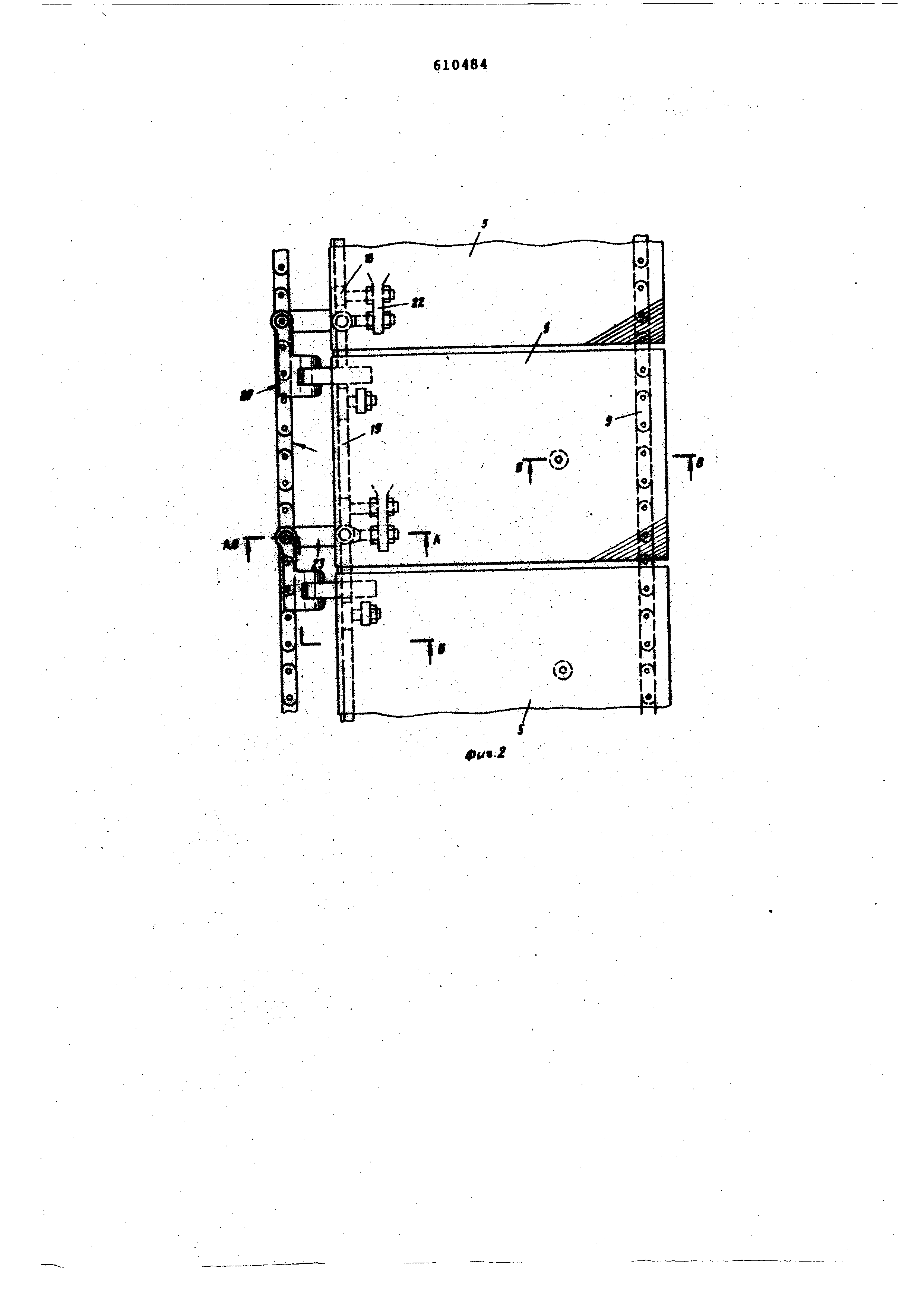
одинаковую скорость, между двигателями 12 и соответствующими ведущими шестернями 2 и б предусмотрен редуктор 13у с помощью которого достигаются различные числа оборотов обеих веду щих шестерен 2 и 6, диаметр которых находится в обратном соотношении к и«слам их оборотов.
Точки li-17 поворота цепи являются точками сцепления и расцепления между дополнительной тяговой цепью 9 и платформами 5.
От точек 14 и 16 поворота связь между д;(ОП9лнительной цепью 9 и наружной стороной каждой платформы 5 прерывается . В точках 15 и 17 роворота восстанавливается соединение жесткой кинематической связи, цепи с платформой . Для того, чтобы ролики 18 на направляющей 19 платформы 5 могли поворачиваться вокруг небольшого радиуса малой шестерни 2, они соединены с цепью 1 через шарнир 20 и шаровой шар НИР 21. Шаровой шарнир державкой 22 закреплен на платформе 5 вблизи наруж ной стороны и соединен с накладкой 23 болтами 24. Свобойный конец накладки 23 нйдет с возможностью вращения на подводковый палец 25 цепи 1. Варнир. 20 державкой 26 закреплен болтами 27 на платформе 5-также вблизи наружной стороны и посредством гильзы надет с возможностью вращения на подводковый палец 25 цепи 1. Во избежание перекоса платформ 5 при возникающих во. время работы различнее «атяжений тяговых цепей между платформой 5 и наружной цепью 9 предусмотрено соединеиие жесткой-кинематической связью. tioB наружной стороной платформы 5 .предусмотрена консоль 28, нижняя поверхность которой Снабжена пластиной 29 из элас+.1 тичного материала, например пластмассы или каучука.
На платформе через подшипники 30 установлены pojnakH 31, которые взаимодействуют с наклонной направляющей 32.
Устройство работает следующим образом .
Тяговая цепь 1 с платформами получает перемещение от привода.
Вследствиетрения обеспечивается жесткаякинематическая связь между
цепью и платформой. Подобная жесткая кинематическая связь тем интенсивнее, чем больше нагрузка платформ 5 пассажирами . Однако эта связь прекрсоцается
в конце прямого участка транспортирования в точках 14 и 1б поворотаг так как закрепленные на подшипниках 30 ролики 31 касаются расположенной вблизи точек 14 и 16 поворота наклонной
направляющей 32, вследствие чего платформы 5 приподнимаются относительно точки вращения шарнира 20 так, что жесткая кинематическая связь между платформами 5 и цепью 9 прекращается. Шарнир 20 посредствсад державки 26 соединен с платформой вращения на пальце 25. Платформы опять входят в жесткую кинематическую связь с цепью 9, когда поворот закончен, т.е. когда они поступают на прямой участок эскалатора.
Формула изобре гени-я
1.ТрансаортчО: : устройство для перевозки пассажиров, содержащее ведущую и направляющую звездочки, тяговую цепь и связанные с ней платфоркол, о т л и ч а ю щ е ё с я тем, что, с целью повышения надежности эксплуатации и
уменьшения износа цепи, оно снабжено огибакицей на1 ужные стороны платформа дополнительной тяговой цепью направ ляющими звездочками и наклонными направляющими , установленными на криволинейных участках пути, причем ведущая и направляквдая з.вездаики смонтированы концентрйчно.
2.Транспорт:ис в устройство по li.l, о т л и ч а .ю щ е -в с я тем, что каждая платформа выяолнеиа с консолью, нижняя поверхность которой снабжена пластиной из эластичного материала, опирающейся на дополнительную тяговуЛ
цепь.
3.Транспортное устройство по пп.1 и 2,отличающееся тем, что платформа снабжена роликом, взаимодействующим с наклоннынш направляющими.
Источникиинформации, принятые во
внимание приэкспертизе:
1. ПатентСША № 3658166,кл.198-16, 1972.
±
n7
lii
имг
20
§
л у///////л л

Реферат
Формула
Комментарии