Система перетаскивания транспортных средств и система контроля транспортных средств - RU2661299C1
Код документа: RU2661299C1
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе перетаскивания транспортных средств и системе контроля транспортных средств.
Уровень техники
Система контроля транспортных средств, в общем, адоптирована к средствам перетаскивания цепного типа, но цепь и элемент цепи на сканированном изображении оказывают значительное влияние на качество изображения и легко скрывают детали изображения.
Сущность изобретения
Задача настоящего изобретения состоит в том, чтобы предложить систему контроля транспортного средства для ослабления или исключения влияния оборудования для перетаскивания транспортных средств на сканированное изображение.
По аспекту настоящего изобретения настоящее изобретение предлагает систему перетаскивания транспортных средств, содержащую: первое средство перетаскивания и второе средство перетаскивания, которые последовательно расположены в направлении перетаскивания транспортных средств, причем в направлении перетаскивания транспортных средств первое средство перетаскивания расположено перед вторым средством перетаскивания, и между первым средством перетаскивания и вторым средством перетаскивания расположена разделяющая секция, так что первое средство перетаскивания и второе средство перетаскивания разделены на заданное расстояние в направлении перетаскивания транспортных средств; первое средство перетаскивания содержит первую опорную плиту, первый удлиненный тяговый элемент и первый толкающий элемент, соединенный с первым удлиненным тяговым элементом, причем первый толкающий элемент движется вокруг первой опорной плиты для толкания колес с целью их перемещения по первой опорной плите для обеспечения движения транспортного средства вперед; второе средство перетаскивания содержит вторую опорную плиту, второй удлиненный тяговый элемент и второй толкающий элемент, соединенный со вторым удлиненным тяговым элементом, причем второй толкающий элемент движется по второй опорной плите для толкания колес с целью их перемещения по второй опорной плите для обеспечения движения транспортного средства вперед.
По аспекту настоящего изобретения система перетаскивания транспортных средств дополнительно содержит: контроллер для управления первым толкающим элементом для толкания первого колеса транспортного средства с первой скоростью, когда второе колесо транспортного средства достигает заданного места на втором средстве перетаскивания в стороне от разделяющей секции на заданном расстоянии, второй удлиненный тяговый элемент приводится в движение и, таким образом, перемещает второе толкающее средство с нижней стороны второй опорной плиты, которое перемещается для контакта со вторым колесом транспортного средства со второй скоростью и толкания второго колеса транспортного средства для поддержания подвижного состояния транспортного средства, причем в направлении перетаскивания транспортного средства второе колесо расположено после первого колеса.
По аспекту настоящего изобретения вторая скорость больше или равна первой скорости, и вторая скорость и первая скорость, по существу, являются постоянными.
По аспекту настоящего изобретения, прежде чем первый толкающий элемент отделится от первого колеса, второй толкающий элемент входит в контакт со вторым колесом.
По аспекту настоящего изобретения система перетаскивания транспортных средств дополнительно содержит датчик, используемый для передачи сигнала, когда второе колесо транспортного средства достигает заданного места, причем после приема сигнала датчика контроллер позволяет второму удлиненному тяговому элементу выполнять ускоренное движение и позволяет второму толкающему элементу, расположенному с нижней стороны второй опорной плиты, перемещаться в течение заданного времени, контактировать со вторым колесом транспортного средства со второй скоростью и толкать второе колесо транспортного средства.
По аспекту настоящего изобретения датчик является датчиком давления, который расположен в заданном месте второго средства перетаскивания.
По аспекту настоящего изобретения система перетаскивания транспортного средства дополнительно содержит средство получения данных о диаметре колеса, используемое для измерения диаметра второго колеса транспортного средства, и вычислительное средство, причем вычислительное средство используется для вычисления расстояния преследования, которое необходимо пройти второму толкающему элементу, чтобы приблизиться ко второму колесу и войти с контакт со вторым колесом в зависимости от диаметра второго колеса, который определяет средство получения данных о диаметре колеса, и положения второго толкающего элемента, расположенного с нижней стороны второй опорной плиты.
По аспекту настоящего изобретения средство получения данных о диаметре колеса содержит средство для формирования изображений, причем средство для формирования изображений используют для формирования двух изображений второго колеса с заданным интервалом времени, и диаметр второго колеса транспортного средства вычисляют по расстояниям перемещения транспортного средства на двух изображениях, первой скорости транспортного средства, диаметрам второго колеса транспортного средства на изображениях и интервалу времени.
По аспекту настоящего изобретения после получения сигнала от датчика контроллер позволяет второму удлиненному тяговому элементу выполнять ускоренное движение и затем замедлять движение до второй скорости.
По аспекту настоящего изобретения ускоренное движение является равномерно-ускоренным движением.
По аспекту настоящего изобретения замедленное движение является равномерно-замедленным движением.
По аспекту настоящего изобретения средство для формирования изображений является камерой или видиконом, расположенным в заданном месте первого средства перетаскивания в стороне от разделяющей секции на заданном расстоянии и находящимся с одной стороны первого средства перетаскивания.
По аспекту настоящего изобретения система перетаскивания транспортных средств дополнительно содержит устройство сбора данных о расстоянии для измерения расстояния между вторым колесом транспортного средства и вторым толкающим элементом, и когда второе колесо транспортного средства достигает заданного положения на втором средстве перетаскивания в стороне от разделяющей секции на заданном расстоянии, устройство сбора данных о расстоянии собирает данные о расстоянии между вторым колесом и вторым толкающим элементом, которое служит в качестве расстояния преследования, которое необходимо пройти второму толкающему элементу, чтобы догнать второе колесо и войти в контакт со вторым колесом.
По аспекту настоящего изобретения система перетаскивания транспортных средств дополнительно содержит второй датчик, используемый для передачи сигнала, когда второе колесо транспортного средства достигает заданного места в стороне от разделяющей секции на заданном расстоянии на втором средстве перетаскивания, причем после приема сигнала второго датчика контроллер приводит в действие устройство сбора данных о расстоянии для сбора данных о расстоянии между вторым колесом и вторым толкающим элементом.
По аспекту настоящего изобретения устройство сбора данных о расстоянии содержит средство получения изображения для получения двух изображений второго колеса и второго толкающего элемента с заданным интервалом времени и вычисления расстояния между вторым колесом и вторым толкающим элементом согласно расстояниям перемещения транспортного средства на двух изображениях, расстояниям между вторым колесом и вторым толкающим элементом на изображениях, первой скорости транспортного средства и временному интервалу.
По аспекту настоящего изобретения, когда второе колесо транспортного средства достигает заданного места в стороне от разделяющей секции на заданном расстоянии на втором средстве перетаскивания, средство получения изображения формирует изображение, содержащее второе колесо и второй толкающий элемент, и когда толкающий элемент достигает заданного положения на втором средстве перетаскивания, средство получения изображения формирует другое изображение, содержащее второе колесо и второй толкающий элемент.
По аспекту настоящего изобретения средство получения изображений является камерой или видиконом, расположенным в заданном месте второго средства перетаскивания в стороне от разделяющей секции на заданном расстоянии и находящимся с одной стороны второго средства перетаскивания.
По аспекту настоящего изобретения система перетаскивания транспортных средств дополнительно содержит датчик, расположенный на втором толкающем элементе и предназначенный для определения, находится ли второй толкающий элемент в контакте со вторым колесом транспортного средства.
По аспекту настоящего изобретения датчик является контактным датчиком.
По аспекту настоящего изобретения удлиненный тяговый элемент является цепью или цепью с плоскими звеньями.
По аспекту настоящего изобретения датчик является оптическим трансивером, расположенным в заданном месте на одной стороне второго средства перетаскивания и предназначенным для испускания светового луча ко второму средству перетаскивания и для определения, что второй толкающий элемент достиг заданного места, когда оптический трансивер принимает световой луч, отраженный отражателем на конце второго толкающего элемента.
По аспекту настоящего изобретения система перетаскивания транспортных средств дополнительно содержит третье средство перетаскивания, по существу, параллельное первому средству перетаскивания, так чтобы первое средство перетаскивания и третье средство перетаскивания могли соответственно приводить в движение левое и правое колеса транспортного средства.
По аспекту настоящего изобретения система контроля транспортных средств содержит: коридор контроля; систему перетаскивания транспортных средств по изобретению, в которой первое средство перетаскивания и второе средство перетаскивания расположены в коридоре контроля; систему рентгенографического контроля, причем, по меньшей мере, часть траекторий лучей от системы рентгенографического контроля проходит через разделяющую секцию между первым средством перетаскивания и вторым средством перетаскивания.
По аспекту настоящего изобретения система рентгенографического контроля содержит источник радиоактивного излучения, расположенный с одной из сторон, верхней стороны или нижней стороны, разделяющей секции между первым средством перетаскивания и вторым средством перетаскивания, и приемник, по меньшей мере, частично расположенный с другой из сторон, верхней стороны или нижней стороны, разделяющей секции между первым средством перетаскивания и вторым средством перетаскивания, и используемый для приема лучей, испускаемых источником радиоактивного излучения и проникающих через контролируемое транспортное средство.
По аспекту настоящего изобретения система рентгенографического контроля содержит скользящее кольцо, источник радиоактивного излучения, установленный на скользящем кольце, и приемник, установленный на скользящем кольце, для приема лучей, испускаемых источником радиоактивного излучения и проникающих через контролируемое транспортное средство. Во время CT-сканирования скользящее кольцо обеспечивает вращение источника радиоактивного излучения и приемника вокруг коридора контроля.
По аспекту настоящего изобретения в разделительной секции образован зазор, так чтобы лучи могли беспрепятственно проходить через разделительную секцию.
По аспекту настоящего изобретения разделяющая секция содержит платформу, причем верхняя поверхность платформы и плоскость пола в коридоре контроля находятся на одинаковой высоте, и посередине платформы образован зазор.
По аспекту настоящего изобретения в зазор платформы помещен материал с такой же толщиной, как и толщина зазора, для обеспечения уплотнительных свойств системы.
Систему перетаскивания транспортных средств и систему контроля транспортных средств по вариантам выполнения настоящего изобретения можно использовать для ослабления или исключения влияния оборудования для перетаскивания транспортных средств на сканированное изображение.
Краткое описание чертежей
Фиг. 1 – вид спереди системы контроля по варианту выполнения настоящего изобретения;
фиг. 2 – вид сверху варианта выполнения системы контроля по настоящему изобретению;
фиг. 3 – схематичный вид системы контроля транспортных средств по варианту выполнения настоящего изобретения, в которой система перетаскивания транспортных средств содержит два средства перетаскивания;
фиг. 4 – схематичный вид системы контроля транспортных средств по другому варианту выполнения настоящего изобретения, в которой система перетаскивания транспортных средств содержит два средства перетаскивания;
фиг. 5 – схематичное изображение измерения по двум фотографиям;
фиг. 6 – положение, в котором толкающий элемент, например, ролик, контактирует с колесом;
фиг. 7 – кривая скорость - время для толкающего элемента, например, ролика;
фиг. 8 – схематичный вид системы контроля транспортных средств по другому варианту выполнения настоящего изобретения, в которой система перетаскивания транспортных средств содержит два средства перетаскивания;
фиг. 9 – схематичное изображение управления толкающим элементом по другому варианту выполнения настоящего изобретения;
фиг. 10 – кривая скорость - время для толкающего элемента, например, ролика;
фиг. 11 – схематичный вид системы контроля транспортных средств с CT-системой по другому варианту выполнения настоящего изобретения, в которой система перетаскивания транспортных средств содержит два средства перетаскивания;
фиг. 12 – схематичное изображение толкающего элемента системы контроля транспортных средств по варианту выполнения настоящего изобретения; толкающий элемент содержит средство определения для определения, находится толкающий элемент в контакте с колесом транспортного средства, и средство обратной связи;
фиг. 13 – схематичное изображение толкающего элемента системы контроля транспортных средств по варианту выполнения настоящего изобретения, показано средство определения положения, используемое для определения, достиг ли толкающий элемент заданного положения;
фиг. 14 – схематичный вид сверху системы перетаскивания транспортных средств системы контроля транспортных средств по варианту выполнения настоящего изобретения, в которой средство перетаскивания системы перетаскивания транспортных средств содержит цепь с плоскими звеньями;
фиг. 15 – схематичный вид сверху системы перетаскивания транспортных средств системы контроля транспортных средств по варианту выполнения настоящего изобретения, в которой средство перетаскивания системы перетаскивания транспортных средств содержит цепь с плоскими звеньями;
фиг. 16 – схематичный вид сбоку системы контроля транспортных средств по варианту выполнения настоящего изобретения;
фиг. 17 – схематичный вид сверху системы контроля транспортных средств по варианту выполнения настоящего изобретения;
фиг. 18 – схематичный вид спереди системы контроля транспортных средств по варианту выполнения настоящего изобретения; показан источник радиоактивного излучения, расположенный с одной из сторон, левой стороны или правой стороны, коридора контроля;
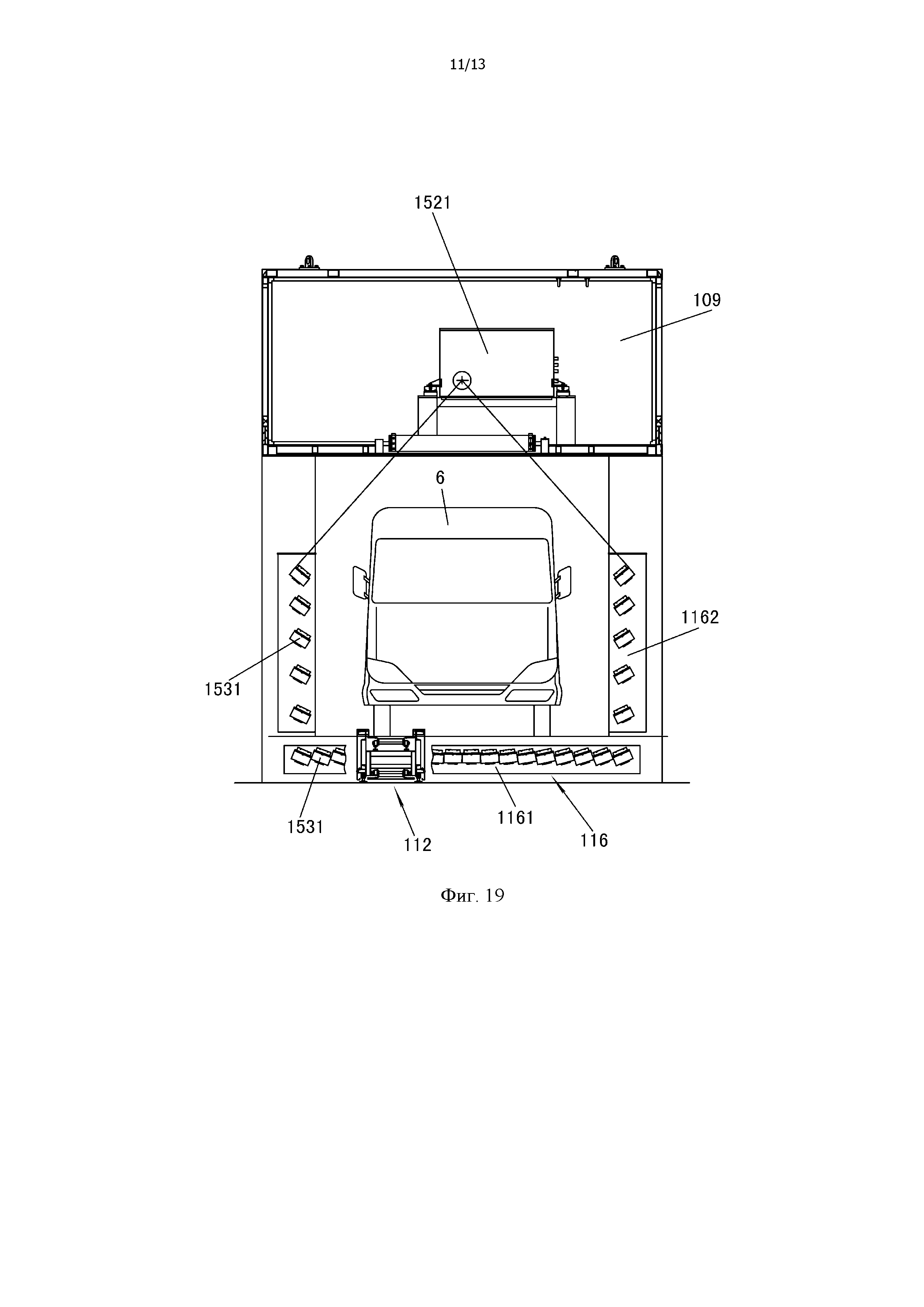
фиг. 19 – схематичный вид спереди системы контроля транспортных средств по варианту выполнения настоящего изобретения; показан источник радиоактивного излучения, расположенный над коридором контроля;
фиг. 20 – схематичное изображение конструкции цепи с плоскими звеньями средства перетаскивания системы перетаскивания транспортных средств системы контроля транспортных средств по варианту выполнения настоящего изобретения, где (A) – вид спереди и (B) – вид сверху;
фиг. 21 – схематичный вид сверху системы перетаскивания транспортных средств системы контроля транспортных средств по варианту выполнения настоящего изобретения, в которой средство перетаскивания транспортного средства содержит толкающий ролик; и
фиг. 22 – схематичный вид сверху системы перетаскивания транспортных средств системы контроля транспортных средств по варианту выполнения настоящего изобретения, в которой средство перетаскивания транспортного средства содержит толкающий ролик.
Подробное описание вариантов выполнения
Вариант выполнения 1
Как показано на фиг. 1, система контроля транспортных средств по варианту выполнения настоящего изобретения содержит: коридор 101 контроля, систему 100 перетаскивания транспортных средств и систему 151 рентгенографического контроля.
Как показано на фиг. 2, система 100 перетаскивания транспортных средств содержит первое средство 111 перетаскивания и второе средство 112 перетаскивания, которые расположены последовательно и расположены в направлении Е перетаскивания транспортных средств, причем первое средство 111 перетаскивания расположено перед вторым средством 112 перетаскивания в направлении Е перетаскивания транспортных средств, и между первым средством 111 перетаскивания и вторым средством 112 перетаскивания расположена разделяющая секция 113 для отделения первого средства 111 перетаскивания от второго средства 112 перетаскивания на заданное расстояние в направлении E перетаскивания транспортных средств. Первое средство 111 перетаскивания и второе средство 112 перетаскивания расположены в коридоре 101 контроля. Траектории, по меньшей мере, части траекторий лучей системы 151 рентгенографического контроля проходит через разделяющую секцию 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания.
В некоторых вариантах выполнения настоящего изобретения, как показано на фиг. 1 и фиг. 2, система 151 рентгенографического контроля содержит источник 152 радиоактивного излучения, расположенный с одной из сторон, а именно, верхней стороны или нижней стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и приемник 153, по меньшей мере, частично расположенный с одной из сторон, а именно, верхней стороны или нижней стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания и используемый для приема лучей, испускаемых источником 152 радиоактивного излучения и проникающих через контролируемое транспортное средство. Источник 152 радиоактивного излучения может быть источником рентгеновского излучения или другим пригодным источником радиоактивного излучения.
Например, как показано на фиг. 1 и 2, стенки 70 для защиты от радиационного излучения расположены с двух сторон коридора 101 контроля, рамная конструкция 80 для установки средств сканирования расположена в границах коридора 101 контроля, источник 152 радиоактивного излучения расположен сверху рамной конструкции 80 для установки средств сканирования, предназначенных для сканирования транспортного средства, проходящего через коридор 101 контроля, и приемник 153 расположен под полом напротив источника 152 радиоактивного излучения.
В некоторых вариантах выполнения настоящего изобретения, как показано на фиг. 11, система 151 рентгенографического контроля может содержать скользящее кольцо 154, источник 152 радиоактивного излучения, установленный на скользящем кольце 154, и приемник 153, установленный на скользящем кольце 154, причем приемник 153 используется для приема лучей, испускаемых источником 152 радиоактивного излучения и проникающих через контролируемое транспортное средство. Скользящее кольцо приводится в движение приводным механизмом с целью вращения для приведения в движение источника 152 радиоактивного излучения и приемника 153 с целью их вращения вокруг контролируемого транспортного средства.
Как показано на фиг. 14, фиг. 15, фиг. 20, фиг. 21 и фиг. 22, первое средство 111 перетаскивания содержит первую опорную плиту 1111, первую цепь 11124 (пример удлиненного тягового элемента) и первый толкающий элемент 1113, соединенный с первой цепью 11124, причем первый толкающий элемент 1113 движется вокруг первой опорной плиты 1111 для толкания колес с целью их перемещения по первой опорной плите 1111 для обеспечения движения транспортного средства вперед. Второе средство 112 перетаскивания содержит вторую опорную плиту 1121, вторую цепь 11224 (пример удлиненного тягового элемента) и второй толкающий элемент 1123, соединенный со второй цепью 11224, причем второй толкающий элемент 1123 движется вокруг второй опорной плиты 1121 для толкания колес с целью их перемещения по второй опорной плите 1121 для обеспечения движения транспортного средства вперед.
Что касается фиг. 3, фиг. 7, фиг. 8, фиг, 9, фиг. 10 и фиг. 11, система перетаскивания транспортных средств дополнительно содержит контроллер (не показан), причем этот контроллер управляет первым толкающим элементом 1113 для толкания первого колеса транспортного средства с первой скоростью, когда второе колесо транспортного средства достигает заданного места A на втором средстве 112 перетаскивания в стороне от разделяющей секции 113 на заданном расстоянии, и вторая цепь 1122, таким образом, перемещает второй толкающий элемент 1123 с нижней стороны второй опорной плиты 1121, который перемещается для контакта со вторым колесом транспортного средства со второй скоростью и толкания второго колеса транспортного средства для поддержания подвижного состояния транспортного средства, причем в направлении E перетаскивания транспортного средства второе колесо расположено после первого колеса. Вторая скорость может быть больше или равна первой скорости, и вторая скорость и первая скорость могут быть, фактически, постоянными. Прежде чем первый толкающий элемент 1113 отделится от первого колеса, второй толкающий элемент 1123 входит в контакт со вторым колесом.
Как показано на фиг. 3, система перетаскивания транспортных средств дополнительно содержит датчик 118, используемый для передачи сигнала, когда второе колесо транспортного средства достигает заданного места A, причем датчик 118 расположен в заданном месте A второго средства 112 перетаскивания в стороне от разделяющей секции 113 на заданном расстоянии. После приема сигнала датчика 118 контроллер позволяет второй цепи 1122 выполнять ускоренное движение и позволяет второму толкающему элементу 1123, расположенному с нижней стороны второй опорной плиты 1121, перемещаться в течение заданного времени, касаться второго колеса транспортного средства со второй скоростью и толкать второе колесо транспортного средства. Датчик 118 может быть датчиком давления, фотоэлектрическим датчиком или пьезоэлектрическим датчиком и т.п., причем датчик давления, фотоэлектрический датчик или пьезоэлектрический датчик и т.п. расположен в заданном месте A второго средства 112 перетаскивания.
К примеру, как показано на фиг. 3, транспортное средство движется слева направо, и первый толкающий элемент 1113 первого средства 111 перетаскивания толкает заднее колесо транспортного средства, так чтобы транспортное средство могло перемещаться вправо с первой скоростью V. Когда переднее колесо транспортного средства достигает датчика 117, расположенного в заданном месте D, второй толкающий элемент 1123 на втором средстве 112 перетаскивания останавливается в точке S.
По варианту выполнения настоящего изобретения, когда переднее колесо транспортного средства достигает заданного места A, после получения сигнала от датчика 118 контроллер позволяет второй цепи 1122 выполнять ускоренное движение и затем замедлять движение до второй скорости. Ускоренное движение может быть равномерно-укоренным движением, и замедленное движение может быть равномерно-замедленным движением. Второй толкающий элемент 1123 второго средства 112 перетаскивания выполняет ускоренное движение и ускоряется до скорости V2 (V2 > V), сохраняет скорость V2 и затем толкает переднее колесо транспортного средства с целью его перемещения. Предпочтительно, когда скорость движения транспортного средства становится равной скорости V2, частота испускания лучей средством 3 генерирования рентгеновских лучей (или коэффициент растяжения локального изображения) изменяется. Например, отношение скорости транспортного средства к частоте испускания лучей является постоянным. Предпочтительно, система адоптирует средства измерения скорости к слежению за скоростью транспортного средства во время его перемещения с первого средства 111 перетаскивания на второе средство 112 перетаскивания и приводится в движение на втором средстве 112 перетаскивания, причем при изменении скорости транспортного средства изменяется частота испускания лучей средством 3 генерирования рентгеновских лучей. Ускоренное движение второго толкающего элемента 1123 может быть равномерно-ускоренным движением.
В варианте выполнения, показанном на фиг. 1, источник 152 радиоактивного излучения содержит средство 3 генерирования рентгеновских лучей и коллиматор 4 луча, причем диапазон испускания лучей показан пунктиром и обозначен ссылочным номером 5. По предпочтительному варианту выполнения настоящего изобретения средство генерирования лучей содержит электронный линейный ускоритель (например, электронный линейный ускоритель на 1,5 МэВ) или рентгеновский аппарат. Предпочтительно, ширина коридора 101 контроля составляет 3,5 м, и его высота составляет 4 м. Соответственно, ширина верхней части транспортного средства, которую можно контролировать с помощью системы контроля транспортного средства, которое описывается в настоящем изобретении, не превышает 1,8 м, ширина нижней части транспортного средства не превышает 2, 4 м, и высота не превышает 2 м. Предпочтительно, как показано на фиг. 1, средство 3 генерирования рентгеновских лучей расположено сверху рамной конструкции 80 для установки средств сканирования, и коллиматор 4 луча расположен с нижней стороны. Когда транспортное средство перемещают в коридор 101 контроля, и оно оказывается в области 5 действия лучей, транспортное средство сканируется рентгеновскими лучами, и приемник 153, расположенный под полом, принимает рентгеновские лучи. Предпочтительно, используемый приемник 153 представляет собой матричный приемник из вольфрамата кадмия 5 мм x 2,5 мм, который получает изображение для просматривания транспортного средства посредством технологии вертикального построении изображения. Предпочтительно, скорость сканирования составляет 0,1 – 0,2 м/с.
Контролируемое транспортное средство может быть малолитражным транспортным средством, например, транспортное средство может быть легковым автомобилем или седаном.
Вышеуказанные конкретные параметры компоновки и выбранные средства используются только в качестве примеров для объяснения технических решений по настоящему изобретению, и не ограничивают технические решения настоящего изобретения, причем специалисты в этой области техники могут выбрать другие параметры и средства согласно фактическим требованиям, и эти варианты или модификации соответствуют объему защиты настоящего изобретения.
Как показано на фиг. 1, систему контроля транспортных средств, описываемую в настоящем изобретении, можно объединить с пунктом взимания платы на автомагистрали для выполнения работ по обеспечению мер безопасности на важных транспортных узлах; номер позиции 81 обозначает островки безопасности с двух сторон коридора контроля, и, кроме того островки безопасности 81 ясно показаны на фиг. 2. Систему контроля транспортных средств, описываемую в настоящем изобретении, также можно применять в таких местах, где расположены крупные здания и сооружения, в местах проведения важных мероприятий или в сухопутных пограничных пунктах и т.п. для выполнения работ по обеспечению мер безопасности.
По предпочтительному варианту выполнения настоящего изобретения первое средство 111 перетаскивания и второй средство 112 перетаскивания расположены с одной стороны в коридоре 101 контроля и могут перетаскивать транспортное средство, въезжающее в коридор 101 контроля для прохождения через коридор 101 контроля. Первое средство 111 перетаскивания толкает задние колеса транспортного средства, и затем второе средство 112 перетаскивания толкает передние колеса транспортного средства, и, соответственно, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания расположена разделяющая секция 113. Траектория лучей, испускаемых источником 152 радиоактивного излучения к приемнику 153, проходит мимо разделяющей секции 113 во избежание влияния первого средства 111 перетаскивания и второго средства 112 перетаскивания на сканируемое изображение.
По некоторым вариантам выполнения настоящего изобретения ширина коридора 101 контроля такова, что транспортное средство может проходить по коридору 101 контроля через систему 100 перетаскивания транспортных средств, и вместе с тем транспортное средство может проходить по коридору 101 контроля по полу без использования каких-либо средств перетаскивания.
В частности, как можно видеть на фиг. 2, направление E является направлением движения транспортного средства. По предпочтительному варианту выполнения настоящего изобретения транспортное средство, показанное пунктирными линиями, перетаскивают к выходу коридора 101 контроля с помощью системы 100 перетаскивания транспортных средств, при этом контроль безопасности транспортного средства выполняют в безлюдном режиме, т.е. водитель покидает транспортное средство в начальной точке, где транспортное средство въезжает на первое средство 111 перетаскивания, и движется пешком к конечной точке у второго средства 112 перетаскивания по проходу 10, где он ожидает транспортное средство после контроля. Проход 10 расположен с задней стороны стенок 70 для защиты от радиационного излучения во избежание воздействия на водителя излучения рентгеновских лучей. На фиг. 2 также показаны другие условия, а именно, что транспортное средство не перетаскивают с помощью системы 100 перетаскивания транспортных средств, а воитель быстро проезжает по коридору 101 контроля, при этом система контроля может делать выбор, сканировать транспортное средство посредством генерирования дозы радиоактивного излучения, безопасной для водителя, или не сканировать транспортное средство. Другими словами, согласно техническим решениям, которые предлагает настоящее изобретение, транспортное средство проходит по коридору 101 контроля по одному из вышеуказанных трех способов. Точнее говоря, различные транспортные средства можно классифицировать следующим образом: транспортные средства, которые не требуют никакого контроля безопасности, могут проходить без перетаскивания с помощью системы 100 перетаскивания транспортных средств и быстро проходят по коридору 101 контроля; транспортные средства с низким риском для безопасности, которые можно не перетаскивать с помощью системы 100 перетаскивания транспортных средств и которые сканируют с генерированием низкой дозы радиоактивного излучения, когда они быстро проходят по коридору 101 контроля; транспортные средства с высоким риском для безопасности, которые перетаскивают с помощью системы 100 перетаскивания транспортных средств для прохождения по коридору 101 контроля для сканирования с генерированием стандартной дозы радиоактивного излучения; таким образом, эффективность контроля безопасности можно значительно повысить, в результате чего можно уменьшить дорожные заторы.
Предпочтительно, отдельное средство перетаскивания, представленное в настоящем описании, может быть средством перетаскивания на автомобильных мойках, а именно, отдельным средством перетаскивания с использованием колес с одной стороны транспортного средства, и, поскольку средство перетаскивания используют, главным образом, на автомобильных мойках, его можно внедрить для контроля безопасности транспортных средств в качестве отработанной технологии, поэтому можно исключить повторные исследования и разработки средств перемещения автотранспорта. Средство перетаскивания является трудосберегающим, энергосберегающим и экологичным оборудованием; тележка контактирует только с колесами, тем самым, вызывая минимальный износ и соударение с транспортными средствами, и в связи с этим легко может быть одобрено владельцами и водителями.
Помимо вышеуказанных преимуществ систему контроля транспортных средств, предлагаемую по изобретению, можно размещать непосредственно на островке безопасности существующего пункта взимания платы, поэтому объем строительных работ будет небольшим, и под оборудование не потребуется значительная площадь. Кроме того, аналогично малогабаритному рентгеновскому устройству для контроля безопасности багажа, когда транспортное средство проходит через поток рентгеновских лучей, сканируемое изображение автоматически формируется в реальном времени, в результате чего эффективность и точность контроля безопасности значительно повышаются.
На фиг. 3 схематично показана система контроля транспортных средств, содержащая первое средство 111 перетаскивания и второе средство 112 перетаскивания. Разделяющая секция 113 расположена между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и лучи 5 проникают через разделяющую секцию для облучения приемника 153.
Предпочтительно, как показано на фиг. 2 и фиг. 3, разделяющая секция 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания содержит платформу 12, которая предназначена для перемещения транспортного средства по разделительной секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания. Верхняя поверхность платформы 12 и плоскость пола в коридоре контроля находятся на одинаковой высоте. Посередине платформы 12 может быть выполнен зазор 115 для предотвращения экранирования лучей от коллиматора 4 к приемнику 153 с целью точного выполнения полного неэкранированного сканирования средств перетаскивания.
Как вариант, в зазоре 115 платформы 12 можно расположить материал такой же толщины, как и толщина зазора, для улучшения уплотняющих свойств системы. Это практически не оказывает никакого влияния на сканируемое изображение, поскольку материал с указанной толщиной дополняет равномерный фон изображения. Разумеется, материалы выбирают, полностью учитывая потери на проникающую способность излучения, прочность и стоимость материалов, например, алюминия, железа, пластика и углеродного волокна и других материалов.
Как показано на фиг. 3, переворачивающаяся плита 13 способствует прохождению колес транспортного средства и обеспечивает прохождение второго толкающего элемента 1123 второго средства 112 перетаскивания, причем переворачивающаяся плита 13 может вращаться вокруг оси. Эта ось перпендикулярна направлению продолжения второго средства 112 перетаскивания или направлению E.
Вариант выполнения 2
Сканируемое транспортное средство проходит зону сканирования с постоянной скоростью, что создает значительное неудобство при управлении сканированием и обработке данных, и цель этого варианта выполнения состоит в том, чтобы обеспечить прохождение транспортным средством разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания с постоянной скоростью.
Компоновка системы в этом варианте выполнения показана на фиг. 1 и фиг. 2, и компоновка средств перетаскивания показана на фиг. 4. Основное различие между фиг. 4 и фиг. 3 состоит в том, что с одной стороны (рядом с первым средством 111 перетаскивания) коридора 101 контроля расположено средство 14 получения изображения, которое находится близко к заданному месту D.
Как показано на фиг. 4, система перетаскивания транспортных средств дополнительно содержит датчик 118, используемый для передачи сигнала, когда второе колесо транспортного средства достигает заданного места A на втором средстве 112 перетаскивания в стороне от разделяющей секции 113 на заданном расстоянии. После получения сигнала от датчика 118 контроллер позволяет второй цепи 1122 выполнять ускоренное движение и затем позволяет второму толкающему элементу 1123, расположенному с нижней стороны второй опорной плиты 1121, перемещаться в течение заданного времени, контактировать со вторым колесом транспортного средства со второй скоростью и толкать второе колесо транспортного средства. Датчик 118 может быть датчиком давления, фотоэлектрическим датчиком или пьезоэлектрическим датчиком и т.п., причем датчик давления, фотоэлектрический датчик или пьезоэлектрический датчик и т.п. расположен в заданно месте A второго средства 112 перетаскивания.
Как показано на фиг. 4, система перетаскивания транспортного средства дополнительно содержит средство получения данных о диаметре колеса, используемое для измерения диаметра второго колеса транспортного средства, и вычислительное средство, причем вычислительное средство используется для вычисления расстояния преследования, которое необходимо пройти второму толкающему элементу 1123, чтобы приблизиться ко второму колесу и войти с контакт со вторым колесом в зависимости от диаметра второго колеса, который определяет средство получения данных о диаметре колеса, и положения второго толкающего элемента 1123, расположенного с нижней стороны второй опорной плиты 1121. Средство получения данных о диаметре колеса может содержать средство для формирования изображений, причем средство для формирования изображений используют для формирования двух изображений второго колеса с заданным интервалом времени, и диаметр второго колеса транспортного средства вычисляют по расстояниям перемещения транспортного средства на двух изображениях, первой скорости транспортного средства, диаметрам второго колеса транспортного средства на изображениях и интервалу времени. Средство для формирования изображений может быть камерой или видеокамерой 14, расположенной в заданном месте D первого средства 111 перетаскивания в стороне от разделяющей секции 113 на заданном расстоянии и находящейся с одной стороны первого средства 111 перетаскивания.
К примеру, как показано на фиг. 4, транспортное средство движется слева направо, и первый толкающий элемент 1113 первого средства 111 перетаскивания толкает заднее колесо транспортного средства, так чтобы транспортное средство могло перемещаться вправо с первой скоростью V. Когда переднее колесо транспортного средства достигает датчика 117, расположенного в заданном месте D (пол), второй толкающий элемент 123 на втором средстве 112 перетаскивания останавливается в точке S, и камера или видеокамера 14 начинает снимать транспортное средство. Через короткий интервал времени t снова производится съемка транспортного средства. Камера или видеокамера 14 может выполнять четкую съемку переднего колеса транспортного средства и близлежащей к ней области.
Как показано на фиг. 5, камера или видеокамера 14 делает снимок контролируемого транспортного средства и делает повторный снимок с интервалом времени t. Транспортное средство перемежается со скоростью V, и транспортное средство перемещается на расстояние Vt в течение времени t. Наружный диаметр переднего колеса транспортного средства измеряют по фотографии, и расстояния перемещения транспортного средства измеряют по двум фотографиям, и, таким образом, два измерения можно выполнять вручную по фотографиям и также можно автоматически обрабатывать посредством использования алгоритма обработки изображений. Наружный диаметр переднего колеса:
Таким образом, наружный диаметр переднего колеса транспортного средства можно измерить, и измерение наружного диаметра переднего колеса является очень важным для второго толкающего элемента 1123 на втором средстве 112 перетаскивания для контакта колеса транспортного средства с заданной скоростью. Разумеется, при условии, что наружный диаметр переднего колеса известен, в свою очередь можно измерить скорость движения. Как вариант, при условии, что известны наружный диаметр переднего колеса и скорость движения, измеряют временной интервал с помощью указанной технологии. Указанный способ предназначен для использования в ряде измерений, таких как измерение размеров, измерение скорости, измерение времени и т.п., причем предмет измерения не ограничивается до транспортных средств или колес. Кроме того, цель повышения точности может быть достигнута посредством повышения точности измерения каждого параметра, выбора множества точек измерения данных или многократного выполнения съемки.
Разумеется, идентификация типа транспортного средства или другие способы измерения диаметра переднего колеса могут заменить вышеуказанный способ измерения посредством съемки для завершения этапа измерения диаметра переднего колеса по настоящему изобретению. Однако способ измерения посредством съемки имеет преимущества, состоящие в низкой стоимости, отработанной технологии оборудования, экономии занимаемого пространства и т.п.
Как показано на фиг. 6, при условии, что второй толкающий элемент 1123 является роликом, после измерения диаметра переднего колеса, когда второй толкающий элемент 1123 второго средства 112 перетаскивания толкает переднее колесо, относительное расстояние между ними можно точно измерить. Если известны диаметр 2R переднего колеса и радиус r второго толкающего элемента 1123, можно получить, что
К примеру, когда переднее колесо транспортного средства достигает датчика 118 в заданном месте A, второй толкающий элемент 1123 второго средства 112 перетаскивания выполняет ускоренное движение и ускоряется до скорости V3 (V3 > V), постепенно уменьшает скорость до скорости V и затем толкает переднее колесо транспортного средства для его перемещения. Отношение скорость движения – время для второго толкающего элемента 1123 второго средства 112 перетаскивания предпочтительно должно быть, как показано на фиг. 7(A). Второй толкающий элемент 1123 ускоряется до скорости V3 из неподвижного состояния в течение времени t1 и затем снижает скорость до V в течение времени t2. Как показано на фиг. 4, расстояние от точки S до места A равно L. Второй толкающий элемент 1123 преследует переднее колесо и должен проходить расстояние L – a быстрее, чем транспортное средство. Второй толкающий элемент 1123 движется согласно кривой скорость – время, как показано на фиг. 7.
L – a = 0,5 x [V3 x t1 + (V3 + V) – V x (t1 + t2) (3)
V3, t1 и t2 при необходимости можно задавать как переменные величины, но до того, как заднее колесо достигнет платформы 12, как показано на фиг. 4, второй толкающий элемент 1123 должен догнать переднее колесо со скоростью V. Таким образом, расстояние L можно рассчитать, используя точный размер второго средства 112 перетаскивания, и также можно получить с учетом интервала времени, необходимого для прохождения второго толкающего элемента 1123 через место S и место A с постоянной скоростью, и его можно использовать в качестве параметра системы.
Предпочтительно, ускоренное движение и замедленное движение второго толкающего элемента 1123 являются равномерно-ускоренным движением и равномерно-замедленным движением.
Ясно, что второй толкающий элемент 1123 может преследовать переднее колесо согласно другим кривым скорость – время, например, как показано на фиг. 7(B). Когда переднее колесо транспортного средства достигает заданного места A, второй толкающий элемент 1123 ускоряется до скорости V3, постоянно движется вперед со скоростью V3 и затем уменьшает скорость до скорости V и догоняет переднее колесо транспортного средства. Согласно вышеприведенному описанию можно получить кинематическую формулу, которая повторно не приводится. Фактически, согласно характеристикам двигателя и посредством адаптации конкретной кривой скорость – время можно рассчитать ряд режимов преследования, включающих в себя преследование с переменным ускорением, при условии обеспечения расстояния L – a.
В решении по варианту выполнения скорость движения транспортного средства поддерживается на уровне V, и частота испускания лучей средством 3 генерирования рентгеновских лучей не подлежит обязательному изменению, поэтому уменьшается сложность управления испусканием лучей и системой обнаружения.
Вариант выполнения 3
В варианте выполнения 2 транспортное средство проходит по разделяющей секции 113 с постоянной скоростью, и средство перетаскивания не экранирует сканирующие лучи. Также предложен способ измерения наружного диаметра колеса. Однако система является немного усложненной, учитывая, что необходимо измерять расстояние L, показанное на фиг. 4. В варианте выполнения 3 на основе измерения наружного диаметра колеса обеспечивают перемещение транспортного средства с постоянной скоростью, и отсутствует необходимость измерять значение L.
По сравнению с вариантом выполнения 2 главная модификация в компоновке системы состоит в следующем: средство 14 получения изображения устанавливают не в заданном месте D, а вблизи заданного положения A рядом с одной стороной средства перетаскивания, как показано на фиг. 8.
Как показано на фиг. 8, система перетаскивания транспортных средств содержит устройство сбора данных о расстоянии для измерения расстояния между вторым колесом транспортного средства и вторым толкающим элементом 1123, и когда второе колесо транспортного средства достигает заданного положения A на втором средстве 112 перетаскивания в стороне от разделяющей секции на заданном расстоянии, устройство сбора данных о расстоянии собирает данные о расстоянии между вторым колесом и вторым толкающим элементом 1123, которое служит в качестве расстояния преследования, которое необходимо пройти второму толкающему элементу 1123, чтобы догнать второе колесо и войти в контакт со вторым колесом.
Как можно видеть на фиг. 8, устройство сбора данных может содержать средство получения изображения, причем это средство 14 получения изображения используют для получения двух изображений второго колеса и второго толкающего элемента 1123 с заданным интервалом времени и вычисления расстояния между вторым колесом и вторым толкающим элементом 1123 согласно расстояниям перемещения транспортного средства на двух изображениях, расстояниям между вторым колесом и вторым толкающим элементом 1123, первой скорости транспортного средства и временному интервалу. Средство получения изображения может быть камерой или видеокамерой, может располагаться в заданном месте A на втором средстве 112 перетаскивания в стороне от разделяющей секции 113 на заданном расстоянии и находится с одной стороны второго средства 112 перетаскивания.
Таким образом, средство получения изображения можно использовать не только для получения данных о диаметре второго колеса транспортного средства, но также для сбора данных о расстоянии между вторым колесом и вторым толкающим элементом 1123, и это расстояние является основой для расчета расстояния преследования, которое необходимо пройти второму толкающему элементу 1123, чтобы догнать второе колесо и войти в контакт со вторым колесом. Нетрудно понять, что точное расстояние преследования можно получить посредством вычитания расстояния в направлении движения транспортного средства между вторым колесом и вторым толкающим элементом, когда второе колесо контактирует со вторым толкающим элементом из указанного расстояния (для круглых толкающих элементов, таких как толкающий ролик, рассчитывается по формуле 2).
Как показано на фиг. 8, система перетаскивания транспортных средств дополнительно содержит датчик 118, используемый для передачи сигнала, когда второе колесо транспортного средства достигает заданного места A в стороне от разделяющей секции 113 на заданном расстоянии на втором средстве 112 перетаскивания, причем после приема сигнала датчика 118 контроллер приводит в действие устройство сбора данных о расстоянии для сбора данных о расстоянии между вторым колесом и вторым толкающим элементом 1123. Датчик 118 может быть датчиком давления, фотоэлектрическим датчиком или пьезоэлектрическим датчиком и т.п., причем датчик давления, фотоэлектрический датчик или пьезоэлектрический датчик и т.п. расположен в заданном месте A второго средства 112 перетаскивания.
Предпочтительно, как показано на фиг. 8, транспортное средство движется слева направо, и первый толкающий элемент 1113 первого средства 111 перетаскивания толкает заднее колесо транспортного средства, так чтобы транспортное средство могло перемещаться вправо с первой скоростью V. Когда переднее колесо транспортного средства достигает первого датчика 117, расположенного в заданном месте D, второй толкающий элемент 1123 на втором средстве 112 перетаскивания останавливается в точке S и начинает движение до скорости V4 (V4 > V). Когда переднее колесо транспортного средства достигает второго датчика 118 (фотоэлектрического датчика или пьезоэлектрического датчика) во втором заданном месте A, выполняют съемку транспортного средства и его переднего колеса, как показано на фиг. 9A. Когда второй толкающий элемент 1123 на втором средстве 112 перетаскивания достигает второго датчика 118 в заданном месте A, снова выполняют съемку транспортного средства и его переднего колеса, как показано на фиг. 9B. Счетчик времени системы (не показан) регистрирует временной интервал tʹ дважды выполненной съемки. Как и в случае вышеописанного принципа измерения наружного диаметра 2R переднего колеса можно легко получить:
Во время второй съемки расстояние между вторым толкающим элементом 1123 и передним колесом транспортного средства также измеряют на фотографии. Таким образом, фактическое расстояние b между вторым толкающим элементом 1123 и передним колесом транспортного средства удовлетворяет формуле:
причем второй толкающий элемент 1123 должен проходить расстояние b – a, чтобы догнать переднее колесо транспортного средства (размер a получают посредством подстановки значения R, рассчитанного по формуле 4, в формулу 2).
Когда второй толкающий элемент 1123 достигает заданного места A, второй толкающий элемент 1123 начинает равномерно снижать скорость до скорости V в течение времени t3 и догоняет переднее колесо транспортного средства (как показано на фиг. 9C); кривая скорость – время показана на фиг. 10A, и можно указать, что
b – a = 0,5 x (V4 – V) t3 (6)
и ускорение равно
p = (V – V4)/t3 (7)
Начиная с момента, когда переднее колесо достигает заданного места A, и до тех пор, пока второй толкающий элемент 1123 не догонит переднее колесо, расстояние перемещения транспортного средства равно V (tʹ + t3). Как показано на фиг. 8, расстояние от края первого средства 111 перетаскивания до заданного места A равно g. Для того чтобы обеспечить, что прежде чем первый толкающий элемент 1113 первого средства 111 перетаскивания отделится от первого колеса (например, заднего колеса), второй толкающий элемент 1123 второго средства 112 перетаскивания будет находиться в контакте со вторым колесом (например, передним колесом), можно предположить, что минимальная величина пространства между передним и задним колесами всех общеизвестных транспортных средств равна M, и, таким образом,
V (tʹ + t3) + g < M (8)
и этому условию должна удовлетворять конструкция системы.
Параметры системы и параметры управления, а именно, ускорение p, скорость V4, временные интервалы tʹ, t3, рассчитывают по формулам 6 – 8, и промежуточное вычисление выполняют по формулам 4 – 5. Таким образом, транспортное средство может стабильно проходить разделяющую секцию 113 с постоянной скоростью.
Разумеется, кривая скорость – время второго толкающего элемента 1123 может видоизменяться от фиг. 10A к фиг. 10B, а именно, после достижения заданного места A второй толкающий элемент 1123 продолжает двигаться в течение времени t4 с постоянной скоростью, затем равномерно снижает скорость до скорости V в течение времени t5 и догоняет переднее колесо транспортного средства. Это способствует ускоренному осуществлению преследования колеса. Дополнительный параметр времени можно регулировать, тем самым, повышая функциональную гибкость системы. Разумеется, это решение является немного более сложным с точки зрения управления по сравнению решением, показанным на фиг. 10A. Фактически, второй толкающий элемент 1123 может преследовать переднее колесо согласно различным кривым скорость – время, включая сюда переменное ускоренное движение, если удовлетворяется условие, что скорость второго толкающего элемента 1123 равна скорости транспортного средства, когда толкающий элемент догоняет переднее колесо.
В варианте выполнения позиционирование заданного места D и заданного места S необязательно должно быть очень точным, поэтому расходы на систему можно дополнительно снизить.
Как показано на фиг. 8, для обеспечения стабильного прохождения транспортного средства по разделительной секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания в систему можно установить педаль 15. Когда переднее колесо достигает заданного места D, педаль 15 удлиняют для обеспечения стабильного прохождения переднего колеса. После прохождения переднего колеса педаль 15 убирают назад. Разумеется, педаль 15 можно исключить при условии, что требование к устойчивому движению транспортного средства не является особенно высоким или диаметр второго толкающего элемента 1123 является достаточно небольшим.
Фактически, с помощью кривой скорость – время и технологии настоящего изобретения скорости толкания транспортного средства первого средства 111 перетаскивания и второго средства 112 перетаскивания можно регулировать в произвольном порядке для удовлетворения ряда требований к применению.
Вариант выполнения 4
Система перетаскивания в вышеописанных вариантах выполнения 1, 2 и 3 применяются в системе перспективного сканирования изображений для исключения экранирования лучей. Как упомянуто выше, система рентгенографического контроля может содержать систему CT-сканирования, как показано на фиг. 11. Источник 152 радиоактивного излучения и приемнике 153 установлены на скользящем кольце 154. Систему перетаскивания настоящего изобретения также можно использовать в системе ядерной магнитно-резонансной визуализации во избежание влияния средств перетаскивания на формирование изображений.
Как видно на фиг. 12, система перетаскивания транспортных средств дополнительно содержит датчик 81, причем этот датчик 81 расположен на втором толкающем элементе 1123 и используется для определения, находится ли второй толкающий элемент 1123 в контакте со вторым колесом, например, с передним колесом) транспортного средства. Датчик может быть контактным датчиком, датчиком давления, пьезоэлектрическим датчиком и т.п. Система перетаскивания транспортных средств дополнительно содержит средство 82 обратной связи. Датчик определяет, находится ли второй толкающий элемент 1123 в контакте с передним колесом и уведомляет контроллер системы контроля транспортных средств через присоединенное средство 82 обратной связи. После приема сигнала, что второй толкающий элемент 1123 находится в контакте со вторым колесом (например, передним колесом) транспортного средства, контроллер системы контроля транспортных средств может управлять вторым средством 112 перетаскивания для толкания транспортного средства вперед со скоростью толкания больше скорости первого средства 111 толкания. В качестве другого предпочтительного решения после приема сигнала, что второй толкающий элемент 1141 находится в контакте со вторым колесом (например, передним колесом) транспортного средства, система контроля транспортных средств может управлять вторым средством 112 перетаскивания для толкания транспортного средства вперед со скоростью толкания, равной скорости толкания первого средства 111 перетаскивания, а именно, перетаскивания транспортного средства с постоянной скоростью. Понятно, что в настоящем техническом решении средство 14 для формирования изображения, как показано на фиг. 8, может быть исключено, и даже датчик 117 в заданном месте D и датчик 118 в заданном месте A, как показано на фиг. 8, могут быть исключены.
Предпочтительно, датчик 81 является пьезоэлектрическим датчиком. Предпочтительно, средство обратной связи содержит блок испускания радиосигнала, используемый для передачи сигнала контроллеру системы контроля транспортных средств.
Что касается системы контроля транспортных средств, которую предлагает настоящее изобретение, указанную систему контроля транспортных средств можно объединить с пунктом взимания платы на автомагистрали для выполнения быстрого контроля безопасности транспортных средств в режиме онлайн; стенки для защиты от радиационного излучения исключают случайное воздействие радиационного излучения на пешеходов или водителей; средства перетаскивания можно использовать для перетаскивания транспортных средств для их прохождения по коридору 101 контроля в безлюдном режиме, причем малогабаритные транспортные средства могут в добровольном порядке быстро проходить по коридору 101 контроля без использования средств перетаскивания, поэтому различные транспортные средства могут подвергаться контролю посредством классификации, что целесообразно с точки зрения уменьшения заторов.
Таким образом, сканируемое изображение можно формировать с помощью неэкранированных лучей, когда транспортное средство перетаскивают или перемещают для прохождения через коридор контроля.
Вариант выполнения 5
Как показано на фиг. 1, система контроля транспортных средств по варианту выполнения настоящего изобретения содержит коридор 1 контроля для прохождения транспортного средства, систему 100 перетаскивания транспортных средств, расположенную в коридоре 101 контроля, и систему 151 рентгенографического контроля, используемую для контроля транспортного средства.
Как показано на фиг. 1 и фиг. 2, система 151 рентгенографического контроля содержит источник 152 радиоактивного излучения, используемый для испускания лучей, например, рентгеновских лучей для сканирования транспортного средства; и приемник 153, используемый для приема лучей, испускаемых источником радиоактивного излучения и проникающих через контролируемое транспортное средство, например, используемый для приема рентгеновских лучей, испускаемых источником 152 радиоактивного излучения. Стенки 70 для защиты от радиационного излучения расположены с двух сторон коридора 101 контроля, рамная конструкция 80 для установки средств сканирования расположена в границах коридора 101 контроля, и источник 152 радиоактивного излучения расположен сверху коридора 101 контроля. Например, источник 152 радиоактивного излучения расположен сверху рамной конструкции 80 для установки средств сканирования, предназначенных для сканирования транспортного средства, проходящего через коридор 101 контроля, и приемник 153 расположен напротив источника 152 радиоактивного излучения.
Система 100 перетаскивания транспортных средств содержит средства 111, 112 перетаскивания, причем средства 111, 112 перетаскивания расположены на полу с одной стороны внутри коридора 101 контроля и могут перетаскивать транспортное средство, въезжающее в коридор 101 контроля для прохождения через коридор 101 контроля.
Следует отметить, что в варианте выполнения система 100 перетаскивания транспортных средств может содержать одно или два средства перетаскивания.
Ширина коридора 101 контроля такова, что транспортное средство может проходить по коридору 101 контроля через систему 100 с помощью средств перетаскивания, и вместе с тем транспортное средство может проходить по коридору 101 контроля по полу без использования каких-либо средств перетаскивания. Другими словами, проезд для перемещения транспортного средства в добровольном порядке расположен в коридоре 101 контроля, и этот проезд для перемещения расположен, по существу, параллельно средствам перетаскивания.
Система контроля транспортных средств дополнительно содержит пешеходную дорожку, причем эта пешеходная дорожка расположена сзади стенок 70 для защиты от радиационного излучения, по которой может проходить водитель от места, где транспортное средства въезжает в коридор 101 контроля, до места, где транспортное средство покидает коридор 101 контроля.
Как можно видеть на фиг. 14, фиг. 20, фиг. 21 и фиг. 22, каждое из средств 111, 112 перетаскивания содержит цепь 114 и толкающий элемент 1141, соединенный с цепью 114, и толкающий элемент 1141 используют для толкания колес с целью их перемещения и движения транспортного средства вперед. Толкающий элемент 1141 средства перетаскивания может толкать только левые колеса или правые колеса транспортного средства.
По некоторым вариантам выполнения настоящего изобретения первая опорная плита 1111 и вторая опорная плита 1121 разделены разделяющей секцией 113 и являются двумя отдельными элементами, причем в разделяющей секции 113 не предусмотрено никаких опорных плит. Первая и вторая цепи 1112 и 11224 являются непрерывными и цельными. Цепи и толкающий элемент непрерывно продолжаются на первом средстве 111 перетаскивания, разделяющей секции 113 и втором средстве 112 перетаскивания. Система контроля транспортных средств дополнительно содержит контроллер, причем этот контроллер корректирует формируемое изображение контролируемого транспортного средства по сканируемому изображению, получаемому системой контроля транспортных средств, во время отсутствия нагрузки на средствах перетаскивания для удаления изображения средств перетаскивания с полученного изображения контролируемого транспортного средства, например, контроллер корректирует полученное изображение контролируемого транспортного средства по сканируемому изображению, полученному системой контроля транспортных средств во время отсутствия нагрузки на средствах перетаскивания, для удаления изображения, по меньшей мере, цепи или толкающего элемента с полученного изображения контролируемого транспортного средства. Контроллер может корректировать формируемое изображение контролируемого транспортного средства по взаимному расположению контролируемого транспортного средства и, по меньшей мере, цепи или толкающего элемента в направлении движения транспортного средства для удаления изображения, по меньшей мере, цепи или толкающего элемента с полученного изображения контролируемого транспортного средства.
По некоторым вариантам выполнения настоящего изобретения толкающий элемент средства перетаскивания контактирует с колесами транспортного средства и толкает колеса для определения взаимного расположения контролируемого транспортного средства и, по меньшей мере, цепи или толкающего элемента в направлении движения транспортного средства.
Как показано на фиг. 13, система контроля транспортных средств дополнительно содержит средство 119 определения положения, используемое для определения, достиг ли второй толкающий элемент 1123 заданного положения, и направления сигнала контроллеру, когда толкающий элемент, который толкает колес транспортного средства, или толкающий элемент во время отсутствия нагрузки на средство перетаскивания достигает заданного положения, чтобы запустить систему 151 рентгенографического контроля для сканирования транспортного средства или ненагруженного средства перетаскивания. Средство 119 определения положения может быть оптическим трансивером, причем оптический трансивер расположен с одной стороны средства перетаскивания и испускает световой луч к одной стороне средства перетаскивания, и когда световой луч освещает отражатель 120 на конце второго толкающего элемента 1123, оптический трансивер принимает световой луч, отражаемый отражателем 120 на конце второго толкающего элемента 1123, и, таким образом, определяет, что второй толкающий элемент 1123 достиг заданного положения.
При условии, что система контроля транспортных средств содержит два средства перетаскивания, как показано на фиг. 2, система 100 перетаскивания транспортных средств содержит первой средство 111 перетаскивания и второй средство 112 перетаскивания, которые последовательно расположены в направлении Е перетаскивания транспортных средств, причем первое средство 111 перетаскивания расположено перед вторым средством 112 перетаскивания, и между первым средством 111 перетаскивания и вторым средством 112 перетаскивания расположена разделяющая секция 113 для отделения первого средства 111 перетаскивания от второго средства 112 перетаскивания на заданное расстояние в направлении E перетаскивания транспортных средств. Первое средство 111 перетаскивания и второе средство 112 перетаскивания расположены в коридоре 101 контроля. Траектории, по меньшей мере, части лучей системы 151 рентгенографического контроля проходят через разделяющую секцию 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания. Как показано на фиг. 14, фиг. 15, фиг. 20, фиг. 21 и фиг. 22, первое средство 111 перетаскивания содержит первую опорную плиту 1111, первую цепь 11124 и первый толкающий элемент 1113, соединенный с первой цепью 11124, и первый толкающий элемент 1113 движется вокруг первой опорной плиты 1111 для толкания колес и их перемещения по первой опорной плите 1111 для приведения в движения транспортного средства в переднем направлении. Второе средство 112 перетаскивания содержит вторую опорную плиту 1121, вторую цепь 1122 и второй толкающий элемент 1123, соединенный со второй цепью 1122, и второй толкающий элемент 1123 движется вокруг второй опорной плиты 1121 для толкания колес и их перемещения по второй опорной плите 1121 для приведения в движения транспортного средства в переднем направлении.
В системе контроля транспортных средств по варианту выполнения настоящего изобретения система контроля транспортных средств может действовать в первом режиме, втором режиме и третьем режиме, в которых транспортное средство может проходить по коридору 101 контроля. В первом режиме транспортное средство в добровольном порядке проходит по коридору 101 контроля, и система рентгенографического контроля не контролирует транспортное средство; во втором режиме транспортное средство в добровольном порядке проходит по коридору 101 контроля, и система рентгенографического контроля контролирует транспортное средство, генерируя дозу радиоактивного излучения меньше первого установленного значения, причем доза согласно первому установленному значению может быть дозой, безопасной для человеческого организма и также может быть определенной дозой ниже максимального дозирования; и в третьем режиме система перетаскивания транспортных средств перетаскивает транспортное средство для его прохождения по коридору 101 контроля, и система рентгенографического контроля контролирует транспортное средство, генерируя дозу больше или равную второму установленному значению, причем второе установленное значение может быть таким же или отличаться от первого установленного значения и, предпочтительно, второе установленное значение больше первого установленного значения.
В первом режиме и втором режиме колеса, по меньшей мере, с одной стороны транспортного средства движутся по первому средству перетаскивания и второму средству перетаскивания или транспортное средство движется по проезду рядом с первым средством перетаскивания и вторым средством перетаскивания. Как упомянуто выше, система контроля транспортных средств дополнительно содержит проезд для движения, расположенный в коридоре 101 контроля и используемый для обеспечения проезда транспортного средства в добровольном порядке, причем проезд для движения расположен, по существу, параллельно средствам перетаскивания, и в первом режиме транспортное средство в добровольном порядке проезжает по проезду для движения.
По некоторым вариантам выполнения транспортное средство может быть легковым автомобилем или седаном. Система контроля транспортных средств может быть объединена с платежным интерфейсом на автомагистрали.
По варианту выполнения настоящего изобретения между первым средством 111 перетаскивания и вторым средством 112 перетаскивания может быть расположена разделяющая секция 113 для исключения создания помех лучам со стороны средств перетаскивания или формируемое изображение контролируемого транспортного средства корректируют для удаления изображения, по меньшей мере, цепи или толкающего элемента с формируемого изображения контролируемого транспортного средства для получения точного изображения контролируемого транспортного средства. Кроме того, по варианту выполнения настоящего изобретения изображения других (неподвижных или подвижных) компонентов средств перетаскивания или изображения других (неподвижных или подвижных) компонентов системы перетаскивания транспортных средств или системы контроля транспортных средств также можно удалить с формируемого изображения контролируемого транспортного средства.
Вариант выполнения 6
Как показано на фиг. 1, система контроля транспортных средств по варианту выполнения настоящего изобретения содержит: коридор 101 контроля, систему 100 перетаскивания транспортных средств и систему 151 рентгенографического контроля.
Как показано на фиг. 2, система 100 перетаскивания транспортных средств содержит первое средство 111 перетаскивания и второе средство 112 перетаскивания, которые расположены последовательно расположены в направлении Е перетаскивания транспортных средств, причем первое средство 111 перетаскивания расположено перед вторым средством 112 перетаскивания, и между первым средством 111 перетаскивания и вторым средством 112 перетаскивания расположена разделяющая секция 113 для отделения первого средства 111 перетаскивания от второго средства 112 перетаскивания на заданное расстояние в направлении перетаскивания транспортных средств. Первое средство 111 перетаскивания и второе средство 112 перетаскивания расположены в коридоре 101 контроля. Траектории, по меньшей мере, части лучей системы 151 рентгенографического контроля проходят через разделяющую секцию 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания. Как показано на фиг. 14, центр 106 потока лучей расположен в разделяющей секции 113.
В некоторых вариантах выполнения настоящего изобретения, как показано на фиг. 1 и фиг. 2, система 151 рентгенографического контроля содержит источник 152 радиоактивного излучения, расположенный с верхней стороны или нижней стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и приемник 153, по меньшей мере, частично расположенный с верхней стороны или нижней стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания и используемый для приема лучей, испускаемых источником 152 радиоактивного излучения и проникающих через контролируемое транспортное средство. Источник 152 радиоактивного излучения может быть источником рентгеновского излучения или другим пригодным источником радиоактивного излучения. Источник 152 радиоактивного излучения может быть источником рентгеновского излучения.
Как показано на фиг. 14, фиг. 15, фиг. 20, фиг. 21 и фиг. 22, первое средство 111 перетаскивания содержит первую опорную плиту 1111, первую цепь 1112 и первый толкающий элемент 1113, соединенный с первой цепью 1112, причем первый толкающий элемент 1113 движется вокруг первой опорной плиты 1111 для толкания колес с целью их перемещения по первой опорной плите 1111 для обеспечения движения транспортного средства вперед. Второе средство 112 перетаскивания содержит вторую опорную плиту 1121, вторую цепь 1122 и второй толкающий элемент 1123, соединенный со второй цепью 1122, причем второй толкающий элемент 1123 движется вокруг второй опорной плиты 1121 для толкания колес с целью их перемещения по второй опорной плите 1121 для обеспечения движения транспортного средства вперед.
Как можно видеть на фиг. 16, фиг. 17, фиг. 18 и фиг. 19, система рентгенографического контроля содержит:
первый источник 1521 радиоактивного излучения, расположенный с верхней стороны или нижней стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и первый приемник 1531, по меньшей мере, частично расположенный с верхней стороны или нижней стороны разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания и используемый для приема лучей, испускаемых первым источником 1521 радиоактивного излучения и проникающих через контролируемое транспортное средство; и
второй источник 1522 радиоактивного излучения, расположенный в поперечном направлении, по существу, перпендикулярном направлению вверх и вниз и направлению E перетаскивания транспортных средств, с одной стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и второй приемник 1532, по меньшей мере, частично расположенный с другой стороны в поперечном направлении разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания и используемый для приема лучей, испускаемых вторым источником 1522 радиоактивного излучения и проникающих через контролируемое транспортное средство. Первый источник 1521 радиоактивного излучения и второй источник 1522 радиоактивного излучения являются ускорителями рентгеновских лучей или рентгеновскими установками или один из источников радиоактивного излучения, первый источник 1521 радиоактивного излучения или второй источник 1522 радиоактивного излучения, является ускорителем рентгеновских лучей, и другой из источников радиоактивного излучения, первый источник 1521 радиоактивного излучения или второй источник 1522 радиоактивного излучения, является рентгеновской установкой.
Как вариант, что можно видеть на фиг. 16, фиг. 17, фиг. 18 и фиг. 19, система рентгенографического контроля содержит:
первый источник 1521 радиоактивного излучения, расположенный с верхней стороны или нижней стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и первый приемник 1531, по меньшей мере, частично расположенный с верхней стороны или нижней стороны разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания и используемый для приема лучей, испускаемых первым источником 1521 радиоактивного излучения и проникающих через контролируемое транспортное средство, причем первый источник 1521 радиоактивного излучения является ускорителем рентгеновских лучей или рентгеновской установкой, и/или
система рентгенографического контроля содержит:
второй источник 1522 радиоактивного излучения, расположенный в поперечном направлении, по существу, перпендикулярном направлению вверх и вниз и направлению E перетаскивания транспортных средств, с одной стороны разделяющей секции 113, между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, и второй приемник 1532, по меньшей мере, частично расположенный с другой стороны в поперечном направлении разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания и используемый для приема лучей, испускаемых вторым источником 1522 радиоактивного излучения и проникающих через контролируемое транспортное средство, причем второй источник 1522 радиоактивного излучения является ускорителем рентгеновских лучей или рентгеновской установкой.
Как показано на фиг. 14, фиг. 15, фиг. 21 и фиг. 22, система контроля транспортных средств дополнительно содержит переходное средство 235, расположенное в разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания, причем переходное средство 235 используют для поддержки транспортного средства, когда транспортное средство движется с первого средства 111 перетаскивания на второе средство 112 перетаскивания. Как можно видеть на фиг. 2, фиг. 3, фиг. 4 и фиг. 8, переходное средство 235 может содержать платформу 12, переворачивающуюся плиту 13, педаль 15 или другие пригодные поддерживающие средства или кронштейны.
Как можно видеть на фиг. 14, фиг. 15, фиг. 19, фиг. 21 и фиг. 22, система контроля транспортных средств дополнительно содержит прямолинейную конструкцию типа консольного крана, расположенную рядом с полом коридора 101 контроля и служащую в качестве конструкции 116 типа консольного крана для первого приемника, причем первый приемник 1531 установлен в прямолинейной конструкции типа консольного крана; кроме того, по меньшей мере, часть прямолинейной конструкции типа консольного крана расположена рядом с полом разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания. Прямолинейная конструкция типа консольного крана может быть полностью расположена под полом коридора контроля или прямолинейная конструкция типа консольного крана может быть расположена под переходным средством 235.
Как вариант, что можно видеть на фиг. 14, фиг. 15, фиг. 19, фиг. 21 и фиг. 22, система контроля транспортных средств дополнительно содержит U-образную конструкцию типа консольного крана, служащую в качестве конструкции 116 типа консольного крана для первого приемника, причем U-образная конструкция типа консольного крана содержит, по существу, горизонтальный конструктивный элемент 1161 типа консольного крана и два, по существу, вертикальных конструктивных элемента 1162 типа консольного крана, продолжающихся вверх от двух концов, по существу, горизонтального конструктивного элемента типа консольного крана, который расположен рядом с полом коридора 1531 контроля, причем первый приемник 1531 расположен, по существу, на горизонтальном конструктивном элементе типа консольного крана и, по существу, вертикальных конструктивных элементах типа консольного крана; кроме того, по меньшей мере, часть горизонтального конструктивного элемента типа консольного крана расположена рядом с полом разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания. По существу, горизонтальный конструктивный элемент типа консольного крана может располагаться под переходным средством 234 или под полом коридора контроля. По существу, вертикальные конструктивные элементы типа консольного крана могут быть вертикальными по отношению к полу коридора контроля и расположены с двух сторон коридора контроля.
Как можно видеть на фиг. 18, система контроля транспортных средств дополнительно содержит L-образную конструкцию типа консольного крана, служащую в качестве конструкции 126 типа консольного крана для второго приемника, причем L-образная конструкция типа консольного крана содержит, по существу, горизонтальный конструктивный элемент типа консольного крана и, по существу, вертикальный конструктивный элемент типа консольного крана, продолжающийся вверх от конца, по существу, горизонтального конструктивного элемента типа консольного крана, причем, по существу, горизонтальный конструктивный элемент типа консольного крана расположен рядом с полом коридора 101 контроля, и, по существу, горизонтальный конструктивный элемент типа консольного крана может располагаться под переходным средством 235 или под полом коридора контроля. Второй приемник 1532 расположен, по существу, на горизонтальном конструктивном элементе типа консольного крана и, по существу, вертикальном конструктивном элементе типа консольного крана; кроме того, по меньшей мере, часть, по существу горизонтального конструктивного элемента типа консольного крана расположена рядом с полом разделяющей секции 113 между первым средством 111 перетаскивания и вторым средством 112 перетаскивания. По существу, вертикальный конструктивный элемент типа консольного крана может быть перпендикулярным к полу коридора контроля и расположен с одной стороны коридора контроля.
Как вариант, см. фиг. 18, система контроля транспортных средств дополнительно содержит перевернутую L-образную конструкцию типа консольного крана, служащую в качестве конструкции 126 типа консольного крана для второго приемника, причем перевернутая L-образная конструкция типа консольного крана содержит, по существу, горизонтальный конструктивный элемент типа 1261 консольного крана и, по существу, вертикальный конструктивный элемент 1262 типа консольного крана, продолжающийся вниз от конца, по существу, горизонтального конструктивного элемента типа консольного крана, причем, по существу, горизонтальный конструктивный элемент 1261 типа консольного крана расположен над коридором 101 контроля, и, второй приемник 1532 расположен, по существу, на горизонтальном конструктивном элементе типа консольного крана и, по существу, вертикальном конструктивном элементе типа консольного крана. По существу, горизонтальный конструктивный элемент типа консольного крана может располагаться над переходным средством 235. По существу, вертикальный конструктивный элемент типа консольного крана может быть перпендикулярным к полу коридора контроля и расположен с одной стороны коридора контроля.
По некоторым вариантам выполнения настоящего изобретения первый приемник 1531 и второй приемник 1532 могут располагаться другим образом, и конструкция типа консольного крана также может принимать другие формы.
В системе контроля транспортных средств по варианту выполнения настоящего изобретения система контроля транспортных средств может действовать в первом режиме, втором режиме и третьем режиме, в которых транспортное средство может проходить по коридору 101 контроля. В первом режиме транспортное средство в добровольном порядке проходит по коридору 101 контроля, и система рентгенографического контроля не контролирует транспортное средство; во втором режиме транспортное средство в добровольном порядке проходит по коридору 101 контроля, и система рентгенографического контроля контролирует транспортное средство, генерируя дозу радиоактивного излучения меньше первого установленного значения, причем доза согласно первому установленному значению может быть дозой, безопасной для человеческого организма и также может быть определенной дозой ниже максимального дозирования; и в третьем режиме система перетаскивания транспортных средств перетаскивает транспортное средство для его прохождения по коридору 101 контроля, и система рентгенографического контроля контролирует транспортное средство, генерируя дозу больше или равную второму установленному значению, причем второе установленное значение может быть таким же или отличаться от первого установленного значения и, предпочтительно, второе установленное значение больше первого установленного значения. В первом режиме и втором режиме колеса, по меньшей мере, с одной стороны транспортного средства движутся по первому средству 111 перетаскивания и второму средству 112 перетаскивания или транспортное средство движется по проходу рядом с первым средством 111 перетаскивания и вторым средством 112 перетаскивания.
Как показано на фиг. 21 и фиг. 22, по меньшей мере, одно из средств перетаскивания, первое средство 111 перетаскивания или второе средство 112 перетаскивания, содержит две цепи и толкающий ролик, присоединенный между двумя цепями и служащий в качестве толкающего элемента, причем толкающий ролик используют для толкания колес транспортного средства для приведения в движение транспортного средства для его прохода вперед по коридору 101 контроля.
Как показано на фиг. 14, фиг, 15 и фиг. 20, по меньшей мере, одно из средств перетаскивания, первое средство 111 перетаскивания или второе средство 112 перетаскивания, содержит цепь 114 с плоскими звеньями (пример удлиненного тягового элемента). Цепь 114 с плоскими звеньями содержит выступ, служащий в качестве толкающего элемента, причем этот толкающий элемент используют для толкания колес транспортного средства для приведения в движение транспортного средства для его прохода вперед по коридору 101 контроля.
По варианту выполнения настоящего изобретения, по меньшей мере, одно из средств перетаскивания, первое средство 111 перетаскивания или второе средство 112 перетаскивания, приводит в движение транспортное средство для его прохода вперед по коридору 101 контроля с помощью, по меньшей мере, одного колеса транспортного средства. Толкающий элемент толкает, по меньшей мере, одно колесо транспортного средства для приведения в движение транспортного средства для его прохода вперед по коридору 101 контроля.
Как показано на фиг. 14, система контроля транспортных средств дополнительно содержит третье средство 110 перетаскивания, по существу, параллельное первому средству 111 перетаскивания, так чтобы первое средство 111 перетаскивания и третье средство 110 перетаскивания могли соответственно приводить в движение левое и правое колеса транспортного средства. Конец третьего средства 110 перетаскивания, расположенный рядом с разделяющей секцией 113, можно, по существу, выровнять с концом первого средства 111 перетаскивания, расположенным рядом с разделяющей секцией 113. Третье средство 110 перетаскивания является вспомогательным средством перетаскивания.
Как показано на фиг. 14, система контроля транспортных средств по варианту выполнения настоящего изобретения может дополнительно содержать входную направляющую и направляющую платформу 105. Первое средство 111 перетаскивания и второе средство 112 перетаскивания можно использовать для перетаскивания одного колеса или двух колес с целью перемещения транспортного средства. Когда транспортное средство движется по первому средству 111 перетаскивания, входная направляющая и направляющая платформа 105 правильно направляют транспортное средство и корректируют отклонение заднего колеса.
Как показано на фиг. 14, третье средство 110 перетаскивания используют для способствования в толкании транспортного средства, когда транспортное средство переходит с первого средства 111 перетаскивания на второе средство 112 перетаскивания.
Как показано на фиг. 14, система контроля транспортных средств по варианту выполнения настоящего изобретения может дополнительно содержать средство блокировки 103 колеса, расположенное с правой стороны первого средства 111 перетаскивания, для блокировки заднего колеса, когда транспортное средство движется в направлении, обратном направлению движения.
Как показано на фиг. 16, фиг. 17, фиг. 18 и фиг. 19, система контроля транспортных средств содержит верхнюю камеру 109, в которой установлен первый источник 1521 радиоактивного излучения, боковую камеру 122, в которой установлен второй источник 1522 радиоактивного излучения, конструкцию 116 типа консольного крана для первого приемника, конструкцию 126 типа консольного крана для второго приемника, систему 127 обнаружения радиогенных элементов, стенки 70 для защиты от радиационного излучения, вычислительное устройство, электрические контрольно-измерительные приборы, программное обеспечение обработки изображений и датчик.
Как показано на фиг. 16, фиг. 17, фиг. 18 и фиг. 19, верхняя камера 109 для источника радиоактивного излучения расположена над конструкцией типа консольного крана и используется для размещения первого источника 1521 радиоактивного излучения и оборудования распределения энергии; боковая камера 122 для источника радиоактивного излучения расположена с одной стороны коридора и используется для размещения второго источника 1522 радиоактивного излучения и оборудования распределения энергии.
Как показано на фиг. 17, система контроля транспортных средств по настоящему изобретению может содержать систему мониторинга радиогенных элементов, автоматическую систему идентификации номерных знаков и систему камер контроля ходовой части, которые используют для мониторинга присутствия радиогенных элементов при выполнении радиационного контроля изображения транспортного средства, идентификации номерного знака, автоматической съемке ходовой части и привязке к формируемому на текущий момент изображению транспортного средства с целью просмотра.
Во время сканирования транспортного средства это транспортное средство движется по первому средству 111 перетаскивания, и после того как заднее колесо транспортного средства будет двигаться по первому средству 111 перетаскивания, система с помощью светофора указывает водителю, чтобы он остановился, водитель покидает транспортное средство, и после подтверждения, что водитель покинул транспортное средство, запускается первое средство перетаскивания; в это время первое средство перетаскивания толкает колеса с помощью первого толкающего элемента 1112 для их перемещения, и когда транспортное средство приближается к центру 106 потока лучей, источник радиоактивного излучения приводится в действие для начала испускания рентгеновских лучей, и приемник на плече приемника принимает лучи и преобразует лучи в необходимые данные изображения. Первое средство 111 перетаскивания продолжает толкать транспортное средство вперед и передает транспортное средство на второе средство 112 перетаскивания, второе средство 112 перетаскивания продолжает толкать колесо вперед с помощью второго толкающего элемента 1122, так что транспортное средство целиком проходит центр 106 потока лучей; в это время система выполняет соответствующий контроль формируемого радиационного изображения транспортного средства. При обнаружении, что транспортное средство полностью прошло центр потока лучей, источнику радиоактивного излучения посылается команда на прекращение испускания лучей. Однако в это время второе средство 112 перетаскивания не прекращает перемещение транспортного средства вплоть до выталкивания заднего колеса транспортного средства в сторону от второго средства 112 перетаскивания, после чего система перетаскивания возвращается в исходное положение для ожидания следующего транспортного средства, подлежащего контролю.
Для обеспечения постоянной скорости транспортного средства в процессе перехода транспортного средства третье средство 110 перетаскивания содействует первому средству 111 перетаскивания в стабильном переходе транспортного средства на второе средство 112 перетаскивания.
Система контроля транспортных средств по настоящему изобретению может действовать в режиме движения транспортного средства. Если это дозволено национальным законодательством, можно формировать радиационное изображение. После подготовки системы к работе водитель проходит инструктаж в отношении въезда транспортного средства в коридор контроля по сигналу светофора; в это время, после того как водитель въехал на транспортном средстве в коридор 101 контроля, измеряют скорость транспортного средства с помощью датчика скорости для определения частоты испускания лучей источниками 1521 и 1522 радиоактивного излучения или частоты отсчетов приемника. Когда транспортное средство приближается к центру 106 потока рентгеновских лучей источников 1521 и 1522 радиоактивного излучения, источники 1521 и 1522 радиоактивного излучения соответственно приводятся в действие для испускания лучей с целью сканирования транспортного средства и формирования рентгеновского изображения транспортного средства. После того как транспортное средство проходит центр 106 потока лучей, система посылает источникам радиоактивного излучения команду на прекращение испускания лучей, и источники радиоактивного излучения прекращают испускание лучей.
Для системы формирования изображения с ускорителем в качестве источника радиоактивного излучения частоту испускания лучей ускорителя определяют посредством измерения скорости транспортного средства. Для системы формирования изображения с рентгеновским устройством в качестве источника радиоактивного излучения частоту отсчетов приемника определяют посредством измерения скорости транспортного средства.
По варианту выполнения настоящего изобретения система контроля транспортных средств дополнительно содержит систему идентификации транспортных средств, используемую для идентификации типа транспортного средства с целью выбора соответствующего порядка сканирующего контроля по типу транспортного средства. Кроме того, по варианту выполнения настоящего изобретения система контроля транспортных средств может дополнительно содержать систему 129 идентификации номерных знаков для идентификации номерного знака транспортного средства. По варианту выполнения настоящего изобретения система контроля транспортных средств может дополнительно содержать систему 128 камер контроля ходовой части для съемки ходовой части транспортного средства. Система камер контроля ходовой части установлена на полу коридора 101 контроля или под полом коридора 101 контроля.
В частности, система контроля транспортных средств по настоящему изобретению может содержать систему обнаружения радиогенных элементов и систему идентификации номерных знаков. Когда система выполняет радиационный контроль изображения транспортного средства, система 127 обнаружения радиогенных элементов и система 129 идентификации номерных знаков, установленные с двух сторон коридора 101 контроля, и система 128 камер контроля ходовой части, установленная на полу или под полом коридора 101 контроля, одновременно определяют, присутствуют ли радиогенные элементы в транспортном средстве 111, автоматически идентифицируют номерной знак транспортного средства, автоматически выполняют съемку ходовой части транспортного средства и выполняют привязку результатов обработки данных к изображению, формируемому на текущий момент посредством радиационного сканирования, с целью его просмотра.
Несмотря на то, что в настоящем документе приводится описание цепи и цепи с плоскими звеньями, служащей в качестве удлиненного тягового элемента, удлиненный тяговый элемент по настоящему изобретению может быть любым пригодным удлиненным тяговым элементом, например, ремнем и т.п.
Несмотря на то, что в настоящем документе были показаны и проиллюстрированы некоторые варианты общей идеи изобретения, специалисту средней квалификации понятно, что в эти варианты выполнения можно внести изменения без отклонения от принципа и сущности общей идеи патента, и объем настоящего изобретения ограничен формулой изобретения и ее эквивалентами.
Реферат
Система перетаскивания для системы рентгенографического контроля транспортных средств содержит последовательно расположенные первое и второе средства перетаскивания. Между первым и вторым средствами перетаскивания расположена разделяющая секция. Каждое средство перетаскивания содержит опорную плиту, удлиненный тяговый элемент и толкающий элемент для толкания колес транспортного средства по опорной плите, соединенный с удлиненным тяговым элементом. Система содержит контроллер для управления первым толкающим элементом для толкания первого колеса с первой скоростью. Контроллер выполнен с возможностью приведения в действие второго удлиненного тягового элемента для его перемещения, когда второе колесо достигает заданного места на втором средстве перетаскивания, так чтобы второй толкающий элемент с нижней стороны второй опорной плиты перемещался со второй скоростью для контакта со вторым колесом и толкания второго колеса. В направлении перетаскивания второе колесо расположено ниже по ходу от первого колеса. Вторая скорость больше или равна первой скорости. Вторая скорость и первая скорость являются по существу постоянными. Прежде чем первый толкающий элемент отделяется от первого колеса, второй толкающий элемент входит в контакт со вторым колесом. Уменьшается влияние оборудования для перетаскивания транспортных средств на сканированное изображение. 2 н. и 12 з.п. ф-лы, 22 ил.
Комментарии