Система для загрузки и выгрузки пищевых продуктов - RU2585183C2
Код документа: RU2585183C2
Чертежи
Описание
Область техники
Данное изобретение относится к системам для загрузки и выгрузки пищевых продуктов, в частности вязких пищевых продуктов, и, еще точнее, к системам, используемым для загрузки пищевых продуктов и их выгрузки в упаковочные машины.
Уровень техники
Системы для загрузки и выгрузки пищевых продуктов известны из уровня техники. Пищевые продукты движутся по конвейерной ленте, и инструмент или робот загружает их, так чтобы их можно было доставить в их конечный пункт назначения, где он их выгружает.
Некоторые из этих систем содержат обычную конвейерную ленту, и инструмент включает опорные средства, на которых изделие расположено при загрузке, и, чтобы загрузить изделие, инструмент приближается к изделию с одной стороны, вступая в боковой контакт с изделием. Это влечет за собой очевидный риск, заключающийся в том, что при контакте с инструментом изделие не будет загружено правильно.
Другие системы, известные из уровня техники, решают эту проблему путем использования конвейерной ленты типа, известного как «лента Polycord», которая содержит несколько параллельных отдельных друг от друга лент. Использование конвейерной ленты этого типа позволяет приближаться к изделию другим способом, который повышает вероятность его правильной загрузки.
В документе EP371687A1 раскрыта система этого типа, которая в дополнение к инструменту включает приводную систему, расположенную под конвейерной лентой. Указанная приводная система содержит несколько вертикальных сегментов, которые толкают изделие, поднимая его с конвейерной ленты. После того как изделие поднимается с конвейерной ленты, инструмент действует на него, как клещи, для его загрузки.
В документе WO2006/061024A1 раскрыта система для загрузки и выгрузки пищевых продуктов этого типа. Инструмент содержит опорные средства, приспособленные проходить сквозь зазоры между лентами средства переноса, чтобы забирать изделие и поддерживать изделие при его загрузке, и выполняет загрузку изделия, двигаясь, по существу, в вертикально восходящем направлении, причем опорные средства движутся в указанном направлении, так что опорные средства поднимают изделие со средства переноса и поддерживают его. Для выгрузки изделия инструмент выполняет такое незначительное движение, как совершение оборотов, что вызывает скольжение изделия, расположенного на опорных средствах, по опорным средствам с целью выгрузки изделия в его конечном пункте назначения.
В документе FR2725430A1 раскрыта система для загрузки и выгрузки пищевых продуктов этого типа. Инструмент содержит опорные средства, приспособленные проходить сквозь зазоры между лентами средства переноса, чтобы забирать изделие и поддерживать изделие при его загрузке.
Раскрытие изобретения
Целью изобретения является предоставить систему для загрузки и выгрузки пищевых продуктов, как описано в пунктах формулы.
Система для загрузки и выгрузки пищевых продуктов согласно изобретению содержит средство переноса, которое содержит несколько параллельных и отдельных друг от друга лент, по которым подлежащие загрузке изделия движутся в продольном направлении, и инструмент, приспособленный загружать изделия, расположенные на средстве переноса, и выгружать их. Инструмент содержит опорные средства, приспособленные проходить сквозь зазоры между лентами средства переноса для загрузки изделия и его поддерживания изделие при его загрузке.
Для загрузки изделия инструмент расположен под изделием и движется, по существу, в вертикально восходящем направлении, причем опорные средства движутся в указанном направлении, так что опорные средства поднимают изделие со средства переноса и поддерживают его. В результате операция загрузки изделия выполняется очень простым способом, поскольку требует только простого движения инструмента, и кроме того, поскольку он загружает изделие снизу, это обеспечивает правильную загрузку во всех случаях, предотвращая риск, который возникает в случае горизонтального движения инструмента с целью загрузки изделия, при котором возможно, что в случае указанного движения изделие не расположено на опорных средствах инструмента.
Опорные средства содержат несколько элементов вращения, которые приспособлены поворачиваться относительно опорной структуры для выгрузки изделия, причем элементы вращения содержат, когда поворачиваются, окружную скорость, равную скорости, с которой изделие движется при выгрузке. В результате благодаря этому поворачиванию изделия выгружают более эффективным способом и предотвращают скольжение указанного изделия по опорным средствам, которое в зависимости от типа изделия может вызывать сгибание указанного изделия, например, при выгрузке, в результате чего изделие не будет выгружено правильно, или может даже привести к тому, что изделие не будет выгружено из-за того, что прилипнет к опорным средствам.
Эти и другие преимущества и характеристики изобретения станут очевидными в свете графических материалов и их подробного описания.
Описание графических материалов
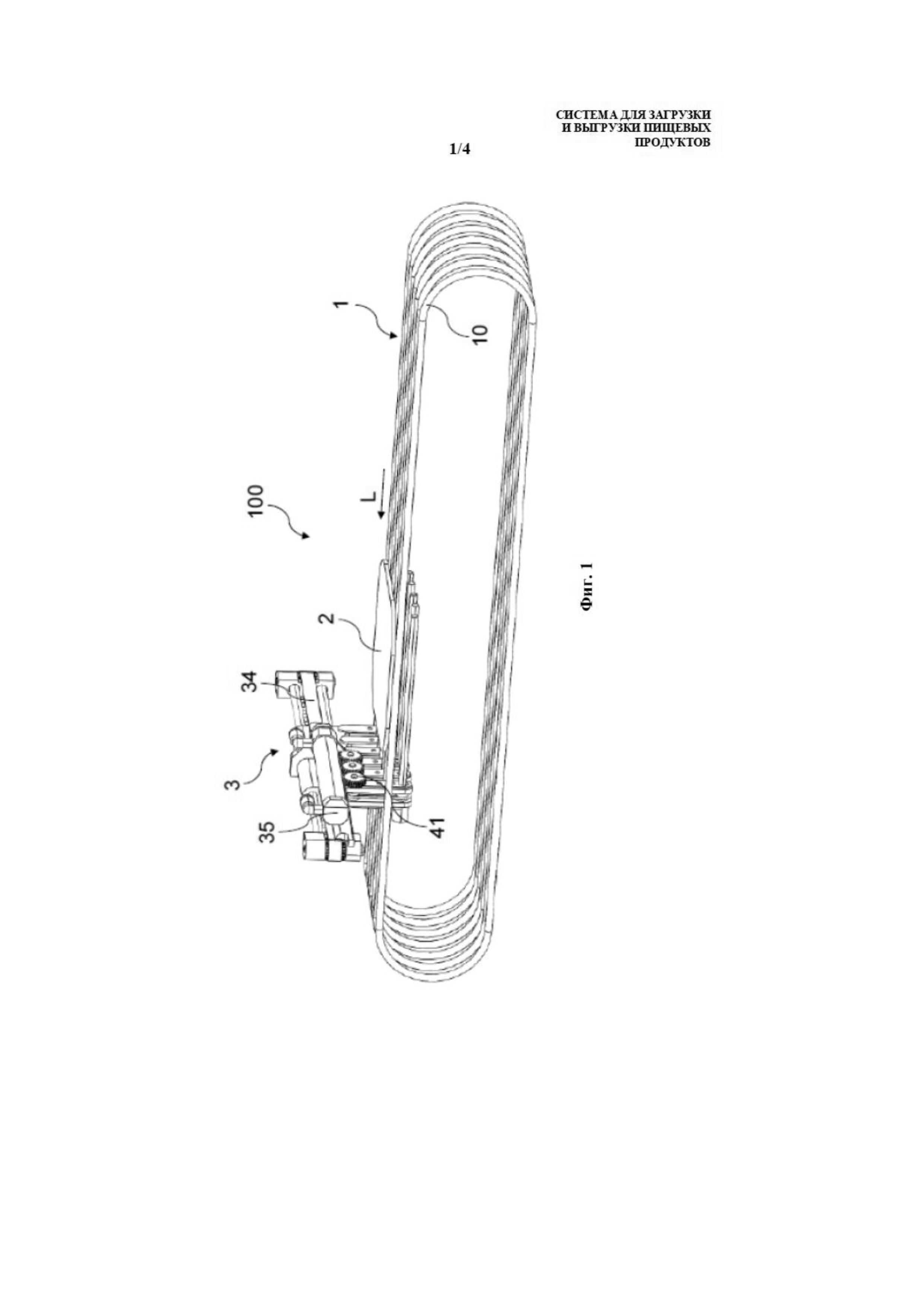
Фиг. 1 иллюстрирует вид в перспективе первого варианта осуществления системы согласно изобретению.
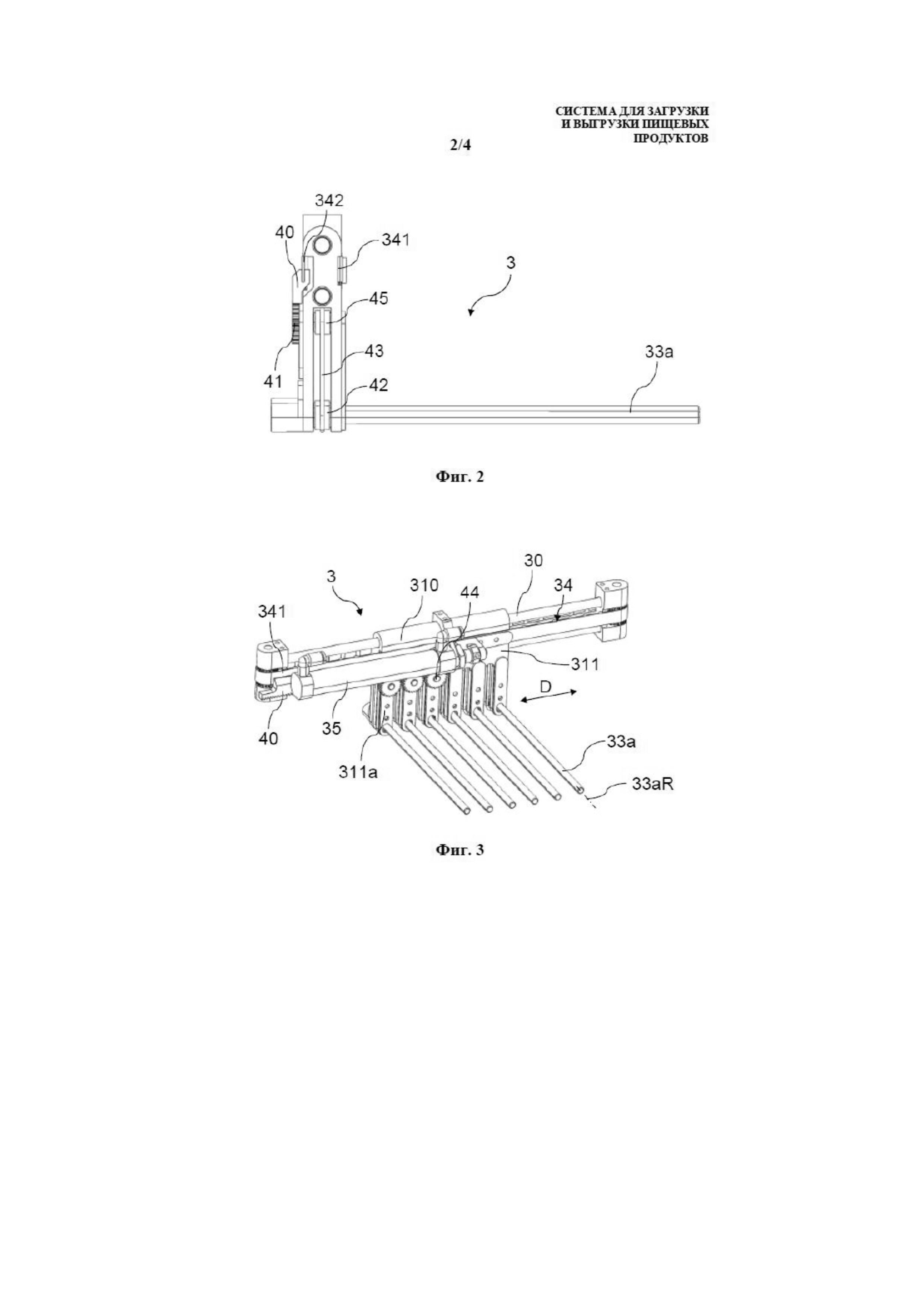
Фиг. 2 иллюстрирует вид сбоку инструмента согласно варианту осуществления на фиг. 1.
Фиг. 3 представляет собой вид в перспективе инструмента системы на фиг. 1, причем опорные средства указанного инструмента поддерживают изделие.
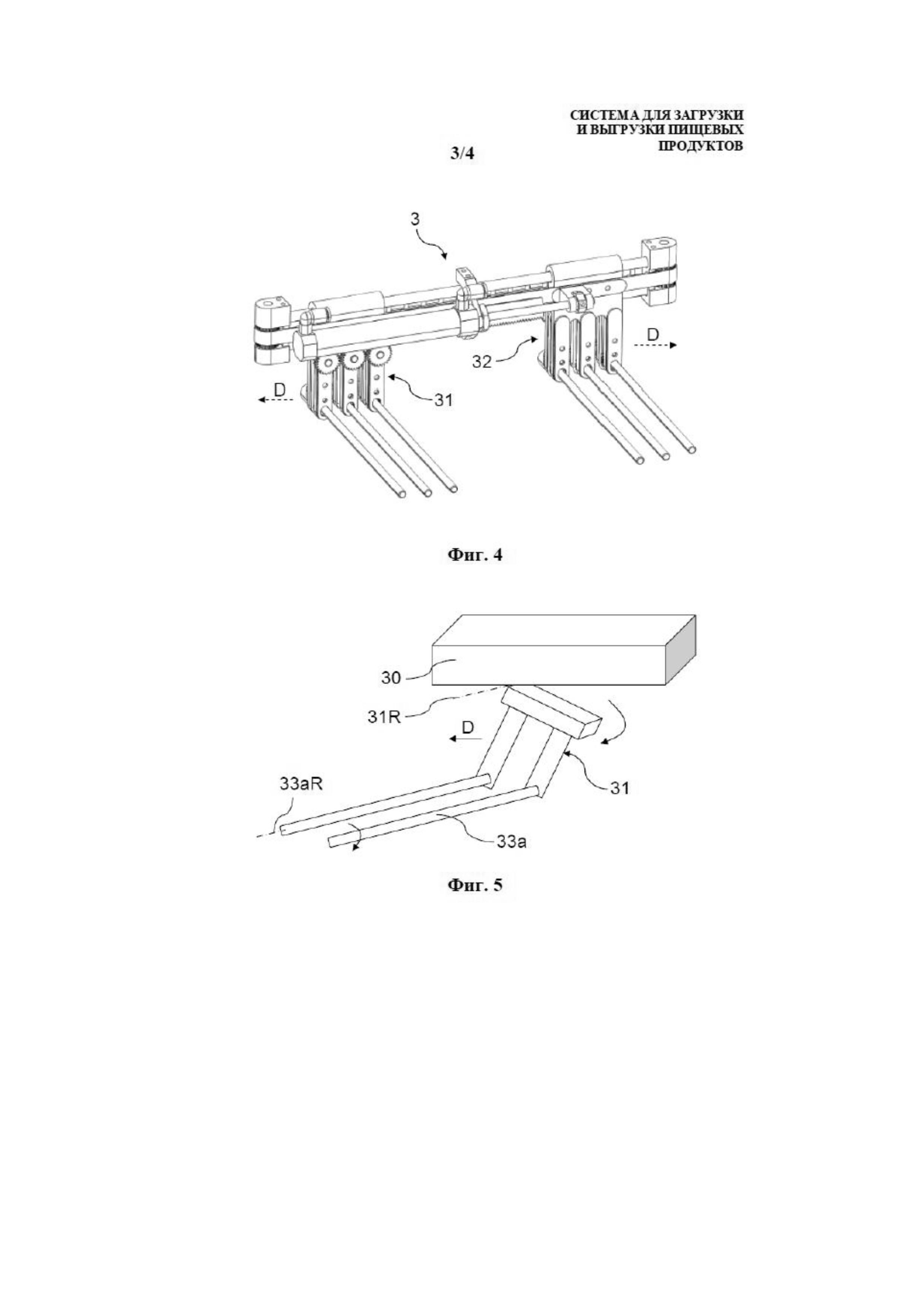
Фиг. 4 представляет собой вид в перспективе инструмента системы на фиг. 1, причем две опорные структуры движутся относительно друг друга для выгрузки изделия.
Фиг. 5 схематически иллюстрирует пятый вариант осуществления системы согласно изобретению.
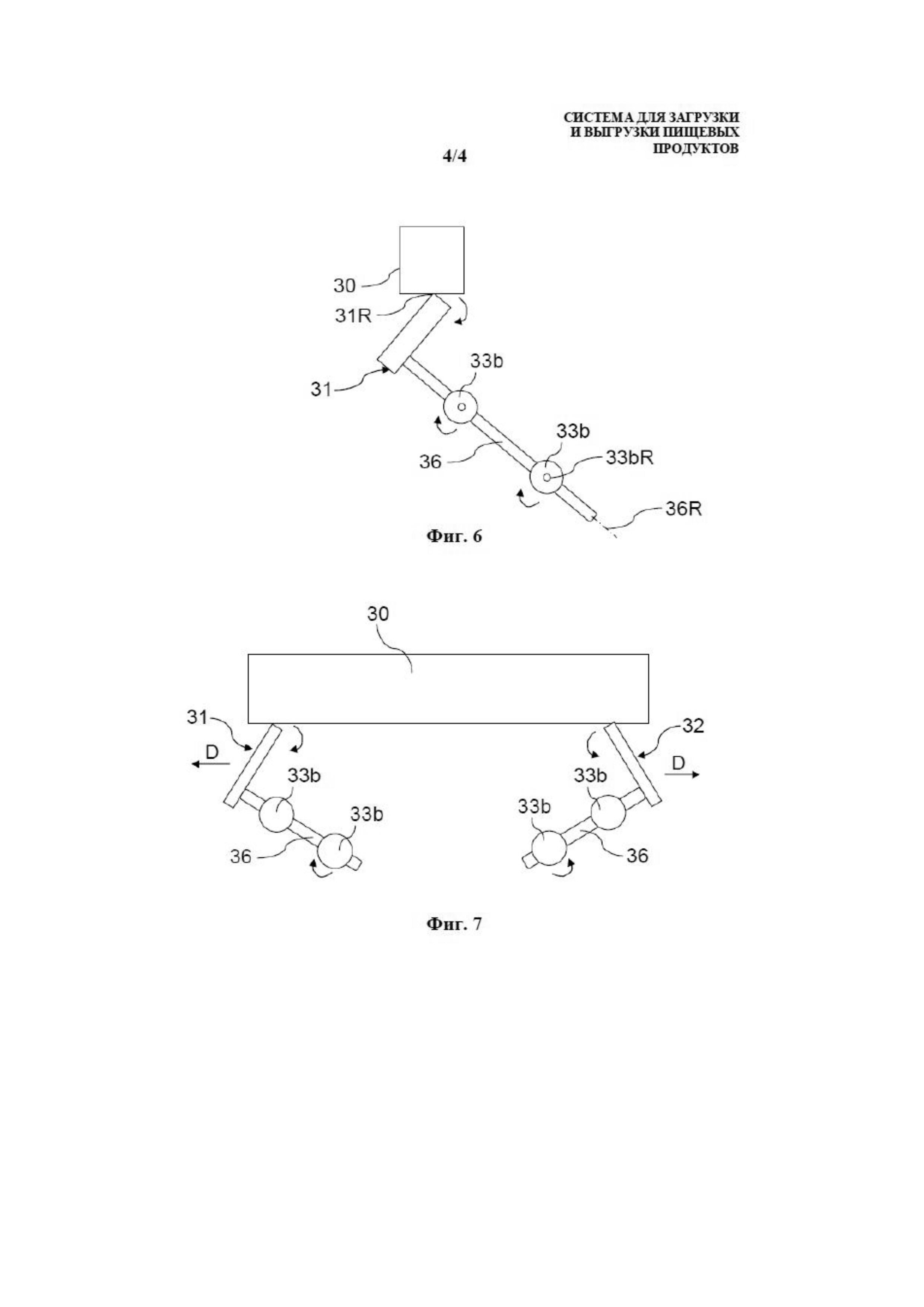
Фиг. 6 представляет собой схематическое отображение и вид сбоку седьмого варианта осуществления системы согласно изобретению.
Фиг. 7 схематически иллюстрирует двенадцатый вариант осуществления системы согласно изобретению.
Подробное раскрытие изобретения
Систему 100 согласно изобретению используют для загрузки и выгрузки пищевых продуктов или пищевых изделий 2, в частности для загрузки изделий 2 в виде ломтей, предпочтительно вязких, таких как, например, ломти холодного мяса, сыра или мяса. Система 100 включает средство 1 переноса, которое содержит несколько параллельных и отдельных друг от друга лент 10, которые соответствуют конвейерной ленте, известной как лента Polycord, или эквивалентной ленте, по которой подлежащие загрузке изделия 2 движутся в продольном направлении L, и инструмент 3, приспособленный загружать изделия 2, расположенные на средстве 1 переноса, и выгружать их. Изделие 2 расположено на средстве 1 переноса, и, когда движется средство 1 переноса, движется вперед в продольном направлении L, пока не достигнет определенного положения, в котором его выгружает инструмент 3.
Инструмент 3 содержит опорные средства, приспособленные проходить сквозь зазоры между лентами 10 средства 1 переноса для загрузки изделия 2 и поддерживания изделия 2 при его загрузке, причем изделие 2 расположено на опорных средствах. Инструмент 3 выполняет загрузку изделия 2, двигаясь, по существу, в вертикально восходящем направлении, причем опорные средства движутся в указанном направлении, так что опорные средства поднимают изделие 2 со средства 1 переноса и поддерживают его. В результате операция загрузки изделия выполняется очень простым способом, и при этом обеспечена правильная загрузка изделия, поскольку опорные средства не встречают сопротивления тому, чтобы, например, поддерживать изделие 2.
Опорные средства содержат несколько элементов вращения 33a; 33b, которые приспособлены поворачиваться относительно опорной структуры 31 для выгрузки изделия 2, причем элементы вращения 33a; 33b имеют, когда поворачиваются, окружную скорость, равную скорости, с которой изделие движется 2 при выгрузке. В результате выгрузка выполняется контролируемым способом, в значительной степени обеспечивающим, чтобы изделие правильным способом сбрасывалось в конечный пункт назначения, как правило, в конкретное приспособление упаковочной машины, и при этом не гнулось или не сбрасывалось неконтролируемым способом в нежелательное положение, поскольку скольжение изделия 2 на опорных средствах, способное привести к вышеупомянутому неконтролируемому сбрасыванию изделия, предотвращается.
Инструмент 3 также включает стационарную структуру 30, с которой с возможностью движения соединена опорная структура 31, причем опорная структура 31 приспособлена двигаться относительно стационарной структуры 30 для выгрузки изделия 2, и элементы вращения 33a; 33b движутся вместе с опорной структурой 31. Таким образом, наряду с тем, что элементы вращения 33a; 33b поворачиваются для выгрузки изделия 2, они также движутся, что способствует выгрузке изделия 2 с инструмента 3. Движением опорной структуры 31 и, следовательно, элементов вращения 33a; 33b может быть как смещение, так и вращение или даже одновременно и то, и другое, как будет объяснено ниже. Напротив, при загрузке изделия 2 как элементы вращения 33a; 33b, так и опорная структура 31 остаются статичными относительно стационарной структуры 30, тем самым делая возможной и упрощая операцию загрузки.
Фиг. 1 иллюстрирует первый вариант осуществления системы 100, предпочтительный вариант осуществления, в котором опорная структура 31 смещена в определенном направлении смещения D относительно стационарной структуры 30 для выгрузки изделия 2, причем элементы вращения 33a смещены вместе с опорной структурой 31, а также поворачиваются относительно опорной структуры 31. Инструмент 3 содержит средство приведения в действие, вызывающее смещение опорной структуры 31, которое содержит привод 35, который при запуске вызывает смещение опорной структуры 31, и основную ленту 34, закрепленную на опорной структуре 31 и с возможностью движения уложенную в стационарной структуре 30, причем привод 35 предпочтительно соответствует цилиндру, который может быть пневматическим и который может действовать на основную ленту 34 или на опорную структуру 31, которая закреплена на основной ленте 34 с помощью основания 310, так что движение основной ленты 34 вызывает смещение опорной структуры 31 в направлении смещения D или наоборот.
В первом варианте осуществления элементы вращения 33a являются продольными и параллельными друг другу, их число предпочтительно равняется трем, которые с одного конца с возможностью вращения соединены с опорной структурой 31 и которые приспособлены поддерживать изделие 2, загружаемое со средства 1 переноса. Для выгрузки изделия 2 опорная структура 31 инструмента 3 смещается в направлении смещения D, и элементы вращения 33a поворачиваются одновременно с указанным смещением относительно своей продольной оси 33aR в направлении, противоположном смещению, так что окружная скорость элементов вращения 33a, когда они поворачиваются, равна скорости смещения элементов вращения 33a в направлении смещения D, но в противоположном направлении, и при выгрузке указанного изделия 2 относительная скорость изделия 2 и элементов вращения 33a равняется нулю. В результате, когда элементы вращения 33a смещены в направлении смещения D, изделие 2 сохраняет свое положение благодаря поворачиванию элементов вращения 33a, падая в конечный пункт назначения, который, как правило, соответствует определенному пункту назначения в упаковочной машине, для последующего упаковывания, когда элементы вращения 33a в достаточной степени смещены в указанном направлении смещения D и перестают действовать как опора для изделия 2. В результате изделие 2 не сдавливается или не сгибается при его выгрузке, а также не прилипает к элементам вращения 33a, и сбрасывается в его конечный пункт назначения регулируемым способом.
Инструмент 3 содержит приводные средства, вызывающие поворачивание элементов вращения 33a относительно их продольной оси 33aR, когда опорная структура 31 смещена в направлении смещения D, показанном на фиг. 2. В первом варианте осуществления приводные средства содержат зубчатую рейку 40, которая прикреплена к опорной структуре 31 и которая вызывает поворачивание элементов вращения 33a со смещением опорной структуры 31, обеспечивая одновременность смещения и поворачивания. Приводные средства также содержат для каждого элемента вращения 33a зубчатое колесо 41, которое движется вместе с опорной структурой 31 и которое действует совместно с зубчатой рейкой 40, поворачиваясь, когда опорная структура 31 смещена в направлении смещения D, вспомогательное колесо 42, которое закреплено на соответствующем элементе вращения 33a и которое смещено вместе с опорной структурой 31, и приводной ремень 43 или эквивалентный элемент, который передает поворачивание зубчатого колеса 41 соответствующему вспомогательному колесу 42, вызывая поворачивание соответствующего элемента вращения 33a. Предпочтительно, приводные средства содержат ось 44, которая поворачивается вместе с зубчатым колесом 41, и приводное колесо 45, закрепленное на указанной оси 44, причем приводной ремень 43 соединятся со вспомогательным колесом 42 и приводным колесом 45, так чтобы именно приводное колесо 45 передавало поворачивание зубчатого колеса 41 вспомогательному колесу 42 посредством приводного ремня 43. Зубчатая рейка 40 закреплена на основной ленте 34, двигаясь вместе с основной лентой 34, и вспомогательное колесо 42 имеет диаметр, по существу, равный удвоенному диаметру приводного колеса 45, так что окружная скорость элементов вращения 33a сохраняется, когда они поворачиваются, равной, но противоположной по направлению скорости смещения элементов вращения 33a в направлении смещения D. При другой конфигурации первого варианта осуществления зубчатая рейка 40 может быть закреплена на стационарной структуре 30, в случае чего приводное колесо 45 и вспомогательное колесо 42 имеют одинаковый диаметр для сохранения окружной скорости элементов вращения 33a, когда они поворачиваются, равной, но противоположной по направлению скорости смещения элементов вращения 33a в направлении смещения D. Хотя зубчатое колесо 41 предусмотрено для каждого элемента вращения 33a, при другой конфигурации первого варианта осуществления приводные средства могут содержать одно зубчатое колесо 41 для всех элементов вращения 33a, причем вышеупомянутое соотношение диаметров приводного колеса 45 и вспомогательных колес 42 сохраняется в зависимости от обстоятельств.
В первом варианте осуществления опорная структура 31 содержит, в дополнение к основанию 310, сегмент 311, по существу, перпендикулярный элементам вращения 33a, который с одного конца закреплен на основании 310 и который содержит выступающую часть 311a для каждого элемента вращения 33a, причем выступающие части 311a параллельны друг другу. Очевидно, что при другой конфигурации первого варианта осуществления основание 310 и сегмент 311 могут образовывать единую деталь, или даже каждая выступающая часть 311a может соответствовать сегменту, содержащему столько же выступающих частей 311a, закрепленных на основании 310, сколько элементов вращения 33a. Элемент вращения 33a с возможностью вращения соединен с концом соответствующего ему сегмента 311, причем указанный конец является противоположным концу, которым сегмент 311 соединен с основанием 310. Кроме того, зубчатое колесо 41 и вспомогательное колесо 42 с возможностью вращения соединены с соответствующим сегментом 311, причем зубчатое колесо 41 находится близко к тому концу сегмента 311, который соединен с основанием 310, а вспомогательное колесо 42 находится близко к тому концу сегмента 311, с которым соединен соответствующий элемент вращения 33a.
В первом варианте осуществления инструмент 3 также содержит вторую опорную структуру 32, аналогичную первой опорной структуре 31, которая смещена в направлении смещения D относительно стационарной структуры 30, когда смещена первая опорная структура 31, но в противоположном направлении. В результате, когда изделие 2 загружается, его поддерживают элементы вращения 33a обеих опорных структур 31 и 32, как показано на фиг. 3, и когда изделие 2 выгружается, оно падает в свой конечный пункт назначения через зазор между элементами вращения 33a опорной структуры 31 и элементами вращения 33a второй опорной структуры 32, как показано на фиг. 4. Для того чтобы вызывать смещение в противоположных направлениях, опорная структура 31 соединена с первым сегментом 341 основной ленты 34, тогда как вторая опорная структура 32 соединена со вторым сегментом 342, противоположным относительно вертикальной плоскости инструмента 3, причем оба сегмента 341 и 342 обращены друг другу. Приводные средства содержат зубчатую рейку 40 для каждой опорной структуры 31 и 32, причем каждая зубчатая рейка 40 закреплена на соответствующем сегменте 341 или 342 основной ленты 34. При другой конфигурации первого варианта осуществления приводные средства могут содержать зубчатую рейку 40 для каждой опорной структуры 31 и 32, обе из которых закреплены на стационарной структуре 30, или одну зубчатую рейку 40, которая является в достаточной степени длинной, чтобы вызывать смещение двух опорных структур 31 и 32.
При другой конфигурации первого варианта осуществления, не показанной на фигурах, вместо зубчатой рейки 40 приводные средства могут содержать фрикционную поверхность, прикрепленную к опорной структуре 31, чтобы вызывать поворачивание элементов вращения 33a с помощью трения. Приводные средства также содержат для каждого элемента вращения 33a фрикционное колесо, которое смещается вместе с опорной структурой 31 и которое действует совместно с фрикционной поверхностью, поворачиваясь, когда опорная структура 31 смещена в направлении смещения D; вспомогательное колесо, которое закреплено на соответствующем элементе вращения 33a и которое смещается вместе с опорной структурой 31; и приводной ремень, который передает поворачивание фрикционного колеса соответствующему вспомогательному колесу, вызывая поворачивание соответствующего элемента вращения 33a. Приводные средства могут содержать одно фрикционное колесо для всех элементов вращения 33a, а не по фрикционному колесу на каждый.
При другой конфигурации первого варианта осуществления, не показанной на фигурах, приводные средства могут содержать, например, двигатель, вызывающий поворачивание элементов вращения 33a, или даже двигатель для каждого элемента вращения 33a, причем двигатель (или двигатели) запускается, когда смещена опорная структура 31. При другой альтернативной конфигурации двигатель (или двигатели) может тормозить или блокировать поворачивание элементов вращения 33a, делая возможным указанное поворачивание, для выгрузки изделия 2, позволяя элементам вращения 33a свободно поворачиваться.
Во втором варианте осуществления, не показанном на фигурах, инструмент 3 аналогичен инструменту первого варианта осуществления, но содержит только одну опорную структуру 31 и, в результате, содержит только средство приведения в действие, необходимое для смещения опорной структуры 31, и приводные средства, необходимые, чтобы вызывать поворачивание элементов вращения 33a опорной структуры 31. Различные вышеупомянутые конфигурации для первого варианта осуществления также могут применяться во втором варианте осуществления в той мере, в какой они применимы с использованием одной опорной структуры 31.
В третьем варианте осуществления системы 100, показанном на фиг. 5, инструмент 3 отличается от инструмента 3 второго варианта осуществления тем, что опорная структура 31 не движется, а совершает обороты относительно оси поворота 31R относительно стационарной структуры 30, и приводными средствами, вызывающими поворачивание элементов вращения 33a, которые могут содержать, например, один или несколько двигателей, как отмечено для примера в последней конфигурации первого варианта осуществления. При другой конфигурации двигатель (или двигатели) может тормозить или блокировать поворачивание элементов вращения 33a, делая возможным указанное поворачивание, для выгрузки изделия 2, позволяя элементам вращения 33a свободно поворачиваться. В третьем варианте осуществления инструмент 3 не содержит средства приведения в действие, вызывающего смещение опорной структуры 31 относительно стационарной структуры 30, а содержит дополнительные приводные средства, вызывающие осуществление оборотов опорной структуры 31 одновременно с поворачиванием элементов вращения 33a, которыми, в качестве примера, может быть двигатель, синхронизированный с приводными средствами элементов вращения 33a. Ось поворота 31R, относительно которой осуществляет обороты опорная структура 31, и ось 31aR, относительно которой поворачиваются элементы вращения 33a, параллельны друг другу и проходят поперечно по отношению к стационарной структуре 30. Различные вышеупомянутые конфигурации первого варианта осуществления также могут быть применены в третьем варианте осуществления в той мере, в какой они применимы с использованием одной опорной структуры 31, которая не смещены относительно стационарной структуры 30.
В четвертом варианте осуществления системы 100, не показанном на фигурах, инструмент 3 может быть аналогичным инструменту 3 третьего варианта осуществления, но также содержит вторую опорную структуру 32, аналогичную первой опорной структуре 31, которая совершает обороты в направлении, противоположном тому, в котором совершает обороты первая опорная структура 31, причем элементы вращения 33b первой опорной структуры 31 и элементы вращения 33b второй опорной структуры 32 поворачиваются в противоположном направлении.
В пятом варианте осуществления системы 100 инструмент 3 отличается от инструмента 3 второго варианта осуществления приводными средствами, которые вызывают поворачивание элементов вращения 33a, и тем, что опорная структура 31 может наряду с движением совершать обороты относительно стационарной структуры 30. Поворачивание элементов вращения 33a происходит в направлении, противоположном тому, в котором совершает обороты и смещается опорная структура 31, причем совершение оборотов способствует выгрузке изделия 2. Приводные средства могут быть эквивалентными приводным средствам, используемым в первом варианте осуществления, но в этом случае они также могут быть приспособлены вызывать совершение оборотов опорной структурой 31, причем зубчатое колесо 41, например, закреплено на опорной структуре 31, в результате чего поворачивание зубчатого колеса 41 вызывает, например, совершение оборотов опорной структурой 31. При другой конфигурации приводные средства могут содержать двигатель, вызывающий, например, поворачивание элементов вращения 33a, или даже двигатель для каждого элемента вращения 33a, причем все двигатели синхронизированы, двигатель (или двигатели) запускается, когда смещается и совершает обороты опорная структура 31 (или двигатель (или двигатели) может тормозить или блокировать поворачивание элементов вращения 33a, делая возможным указанное поворачивание, для выгрузки изделия 2, позволяя элементам вращения 33a свободно поворачиваться), и инструмент 3 также может содержать дополнительные приводные средства, например двигатель, причем указанный двигатель синхронизирован с двигателем (или двигателями) элементов вращения 33a, так что они могут работать одновременно. Различные вышеупомянутые конфигурации первого варианта осуществления также могут применяться в пятом варианте осуществления в той мере, в какой они применимы с использованием одной опорной структуры 31.
В шестом варианте осуществления системы 100, не показанном на фигурах, инструмент 3 может быть аналогичным инструменту 3 пятого варианта осуществления, но также содержит вторую опорную структуру 32, аналогичную первой опорной структуре 31, которая совершает обороты в направлении, противоположном тому, в котором совершает обороты первая опорная структура 31, причем элементы вращения 33a первой опорной структуры 31 и элементы вращения 33a второй опорной структуры 32 поворачиваются в противоположном направлении, и которая смещена в направлении смещения D, когда смещена первая опорная структура 31, но в противоположном направлении.
В седьмом варианте осуществления системы 100, схематически показанном на фиг. 6, опорная структура 31 совершает обороты относительно стационарной структуры 30 для выгрузки изделия 2, так что элементы вращения 33b становятся под уклоном к конечному пункту назначения изделия 2, обеспечивая контролируемый сброс изделия 2 благодаря поворачиванию опорных средств. Опорная структура 31 содержит несколько продольных и параллельных друг другу опорных элементов 36, и по меньшей мере один элемент вращения 33b, с возможностью вращения соединенный с каждым опорным элементом 36, причем ось поворота 33bR, относительно которой поворачивается элемент вращения 33b, проходит поперечно по отношению к продольной оси 36R соответствующего опорного элемента 36, и элементы вращения 33b поворачиваются в направлении, противоположном тому, в котором совершает обороты опорная структура 31. Подобно третьему и пятому вариантам осуществления, ось 31bR, относительно которой поворачиваются элементы вращения 33b, также параллельна оси поворота 31R, относительно которой совершает обороты опорная структура 31, что в данном случае является поперечным по отношению к стационарной структуре 30. Инструмент 3 содержит приводные средства, не показанные на фигурах, вызывающие одновременное поворачивание всех элементов вращения 33b, которые могут быть аналогичными первому варианту осуществления, что может соответствовать множеству синхронизированных двигателей, по одному на каждый элемент вращения 33b, или одному двигателю для всех элементов вращения 33b, и дополнительное движущее средство, вызывающее совершение оборотов опорной структурой 31, которым может быть, например, двигатель, причем указанный двигатель синхронизирован с двигателем (или двигателями) элементов вращения 33b, так чтобы они работали одновременно. При другой конфигурации двигатель (или двигатели) может тормозить или блокировать поворачивание элементов вращения 33a, делая возможным указанное поворачивание для выгрузки изделия 2, позволяя элементам вращения 33a свободно поворачиваться. При другой конфигурации седьмого варианта осуществления элементы вращения соответствуют по меньшей мере одной конвейерной ленте для каждого опорного элемента 36.
В восьмом варианте осуществления системы 100, не показанном на фигурах, инструмент 3 может быть аналогичным инструменту 3 седьмого варианта осуществления, но также содержит вторую опорную структуру 32 аналогичную первой опорной структуре 31, которая совершает обороты в направлении, противоположном тому, в котором совершает обороты первая опорная структура 31, причем элементы вращения 33b первой опорной структуры 31 и элементы вращения 33b второй опорной структуры 32 поворачиваются в противоположном направлении.
В девятом варианте осуществления системы 100 инструмент 3 отличается от инструмента 3 седьмого варианта осуществления тем, что опорная структура 31 не совершает обороты, а смещена относительно стационарной структуры 30 в направлении смещения D. С этой целью инструмент 3 также включает средство приведения в действие эквивалентное или аналогичное тем, которые используют в первом варианте осуществления, чтобы вызывать смещение. Приводные средства могут быть эквивалентным тем, которые упомянуты в первом варианте осуществления, хотя в этом последнем случае приводной ремень 43 должен быть приспособлен к обстоятельствам и может потребовать дополнительного приводного колеса для правильного направления приводного ремня 43 к элементам вращения 33b.
В десятом варианте осуществления системы 100, не показанном на фигурах, инструмент 3 может быть аналогичным инструменту 3 девятого варианта осуществления, но также включает вторую опорную структуру 32, аналогичную первой опорной структуре 31, которая смещается в направлении, противоположном тому, в котором смещена первая опорная структура 31, причем элементы вращения 33a первой опорной структуры 31 и элементы вращения 33a второй опорной структуры 32 поворачиваются в противоположном направлении.
В одиннадцатом варианте осуществления системы 100 инструмент 3 отличается от инструмента 3 седьмого варианта осуществления тем, что опорная структура 31 может, наряду с совершением оборотов, быть смещенной относительно стационарной структуры 30 в направлении смещения D. Средство приведения в действие может быть эквивалентным или аналогичным тем, которые использованы в первом варианте осуществления, чтобы вызывать смещение, приводные средства могут быть эквивалентными тем, которые упомянуты в девятом варианте осуществления, и совершение оборотов может быть вызвано таким же способом, как описано в третьем варианте осуществления.
В двенадцатом варианте осуществления системы 100, показанном на фиг. 7, инструмент 3 может быть аналогичным инструменту 3 одиннадцатого варианта осуществления, но также содержит вторую опорную структуру 32, аналогичную первой опорной структуре 31, которая совершает обороты в направлении, противоположном тому, в котором совершает обороты первая опорная структура 31, причем элементы вращения 33b первой опорной структуры 31 и элементы вращения 33b второй опорной структуры 32 поворачиваются в противоположном направлении, и которая смещена в направлении смещения D, когда смещается первая опорная структура 31, но в противоположном направлении, таким же способом, как упоминается в пятом варианте осуществления. В двенадцатом варианте осуществления опорные структуры 31 и 32 расположены относительно стационарной структуры 30 иначе, чем в остальных вариантах осуществления, причем опорные элементы 36 обращены друг к другу, а не примыкают друг к другу. В результате в этом случае ось поворота 31R структур проходит поперечно по отношению к стационарной структуре 30.
Данное изобретение не ограничено только упомянутыми вариантами осуществления и конфигурациями. В вариантах осуществления и/или конфигурациях, которые это допускают, инструмент 3 может также содержать стопор (не показан) на случай, если изделие 2 случайно упадет, когда инструмент 3 смещается из одного положения, в котором изделие 2 загружается, в положение, в котором оно выгружается на упаковочную машину, и/или чтобы добиться большего контроля над выгрузкой изделия 2, причем стопор при необходимости отключают. Подобным образом возможно также включить толкательный элемент (не показан), который удерживает изделие на опорных средствах во время движения инструмента 3 из положения загрузки в положение выгрузки, и/или направляет изделие 2, способствуя выгрузке изделия 2.
Более того, изобретение не сводится к конкретным вариантами осуществления и/или описанными здесь конфигурациям, но также охватывает, например, вариации, которые могут быть выполнены специалистом в данной области техники, исходя из указанных вариантов осуществления и/или конфигураций, в пределах объема, установленного формулой изобретения.
Реферат
Система для загрузки и выгрузки пищевых продуктов содержит средство переноса (1), имеющее несколько параллельных лент (10), по которым движутся подлежащие загрузке изделия (2), и инструмент (3), приспособленный загружать изделия. Инструмент содержит опорные средства, приспособленные проходить сквозь зазоры между лентами для загрузки изделия и поддержки изделия при его выгрузке и осуществлять загрузку изделия, передвигая его в вертикально восходящем направлении, причем опорные средства поднимают изделие со средства переноса. Опорные средства приспособлены поворачиваться относительно опорной структуры для выгрузки изделия, причем опорные средства имеют, когда поворачиваются, окружную скорость, равную скорости, с которой изделие движется при выгрузке. Обеспечиваются простая и эффективная загрузка и выгрузка изделия, предотвращаются сгибание изделия, его скольжение и/или неточное расположение на опорных средствах. 15 з.п. ф-лы, 7 ил.