Конвейерная ленточная система - RU2117618C1
Код документа: RU2117618C1
Чертежи




Описание
Изобретение относится к созданию бесконечного ленточного конвейера, имеющего смещенные по вертикали несущие нагрузку верхнюю и нижнюю ветви, движущиеся в противоположном направлении, причем каждая из этих ветвей имеет один входной и один выходной конец; а также к созданию конвейерной системы, в которой предусмотрены питающий и выдачной конвейеры для продвижения в "линию" (по одной прямой) перемещаемых грузов к входному и от выходного концов несущих нагрузку ветвей бесконечного ленточного конвейера.
Способность продвижения грузов в одном направлении по одной из ветвей и в противоположном направлении по другой из ветвей ленточного конвейера открывает широкие возможности в тех применениях, где требуется двустороннее перемещение грузов, например, при обработке багажа в аэропорту.
В патенте США N 1614816 приведен конвейер с идущими друг над другом ветвями, содержащий верхний и нижний участки, состоящие из несущих груз роликов, приводимых в движение в противоположном направлении при помощи бесконечной ленты. Транспортируемые грузы при этом не перемещаются в линию к нижней ветви конвейера или от нее.
Конвейерная система для обработки багажа в аэропортах раскрыта также в патенте США N 5056647. В этой системе предусмотрены ленточные конвейеры, установленные тандемом или конец к концу, которые осуществляют транспортирование багажа только в одном направлении. Другими словами, требуются отдельные конвейеры для обработки поступающего или отправляемого багажа.
Соответствующая изобретению ленточная конвейерная система с верхней и нижней ветвями содержит бесконечную ленту, средства поддержания ленты для организации перемещения одной верхней несущей нагрузку ветви, имеющей входной и выходной конец, и одной нижней несущей нагрузку ветви, смещенной в вертикальном направлении вниз относительно верхней ветви, причем нижняя ветвь имеет входной и выходной концы, расположенные противоположно входному и выходному концам верхней ветви. Питающий конвейер нижней ветви сходится в боковом направлении и совмещается (выравнивается) с нижней ветвью на ее входном конце, а выдачной конвейер нижней ветви расходится в боковом направлении от совмещения с нижней ветвью на ее выходном конце. Первая группа роликов направляет ленту в нижнем направлении от выходного конца верхней ветви, горизонтально под питающим конвейером нижней ветви, и в направлении вверх к входному концу нижней ветви. Вторая группа роликов направляет ленту в нижнем направлении от выходного конца нижней ветви, горизонтально ниже выдачного конвейера нижней ветви, и в направлении вверх к входному концу верхней ветви. По крайней мере одна из первой и второй групп роликов содержит ролик привода в движение ленты, к которому подключен блок привода, и динамическое роликовое натяжное устройство, прикладывающее натяжение к ленте на стороне ниже по ходу движения относительно приводного ролика.
В альтернативном варианте, каждая из первой и второй групп роликов может содержать ролик привода ленты, к которому подключен блок привода, и динамическое натяжное устройство, установленное ниже по ходу движения относительно приводного ролика и предназначенное для приложения натяжения к ленте.
Преимущественно, питающий конвейер нижней ветви содержит один основной питающий конвейер, расположенный параллельно пути перемещения ленты и заканчивающийся на одной стороне первой группой роликов, причем одна первая изгибающаяся конвейерная секция отходит от основного питающего конвейера в направлении к пути перемещения ленты, а одна вторая изогнутая в противоположном направлении конвейерная секция отходит от первой изогнутой конвейерной секции и идет к входному концу нижней ветви. Эти основной, первый и второй питающие конвейеры приводятся в движение, преимущественно независимо, со скоростью второго питающего конвейера, близкой к скорости или приблизительно равной скорости перемещения ленты.
Выдачной конвейер нижней ветви преимущественно содержит основной выдачной конвейер, идущий в направлении, параллельном пути перемещения ленты, и начинающийся на одной стороне второй группы роликов, первую изогнутую секцию выдачного конвейера, идущую от выходного конца нижней ветви в боковом направлении от пути перемещения ленты, и одну вторую изогнутую в противоположном направлении секцию выдачного конвейера, идущую от первой секции к основному выдачному конвейеру. Эти основной, первый и второй выдачные конвейеры приводятся в движение, преимущественно независимо, со скоростью первого выдачного конвейера, которая приблизительно равна скорости движения ленты.
В преимущественном виде осуществления соответствующего изобретению ленточного конвейера с идущими друг над другом ветвями, предусмотрена пара верхних боковин (боковых рам) и серии несомых ими верхних направляющих роликов, поддерживающих ленту при ее перемещении от входного до выходного конца верхней несущей груз ветви, а также пара нижних боковин, имеющих серии нижних направляющих роликов, поддерживающих ленту при ее перемещении между входным и выходным концами нижней несущей груз ветви, смещенной в вертикальном направлении вниз относительно верхней несущей груз ветви. Первая система привода установлена между выходным концом верхней ветви и смежным, противоположно повернутым входным концом нижней ветви, а вторая система привода установлена между выходным концом нижней ветви и смежным, противоположно повернутым входным концом верхней ветви.
Каждая первая и вторая система привода содержит раму, блок привода в движение ленты, содержащий приводной ролик ленты и установленный на раме, натяжную каретку, установленную на раме с возможностью перемещения, натяжной ролик, установленный на каретке, и средства смещения, связанные с кареткой. Первая система привода содержит первые направляющие ролики, установленные на раме, которые определяют путь перемещения ленты от выходного конца верхней ветви вокруг приводного ролика, от приводного ролика вокруг натяжного ролика и от натяжного ролика в направлении к входному концу нижней ветви. Вторая система привода содержит вторые направляющие ролики, установленные на раме, которые определяют путь перемещения конвейерной ленты вокруг приводного ролика, вокруг натяжного ролика и от натяжного ролика к входному концу верхней ветви, причем приводной ролик второй системы привода принимает ленту с выходного конца нижней ветви.
Каждый из входных и выходных концов нижней ветви определен (ограничен) оконечным роликом ввода конвейерной ленты и имеет ролик регулировки ленты, установленный вертикально под оконечным роликом. Первые направляющие ролики посылают ленту к регулировочному ролику на входном конце нижней ветви на первой секции пути перемещения ленты, которая смещена вниз относительно уровня нижней ветви конвейера. Регулировочный ролик на выходном конце нижней ветви направляет ленту к приводному ролику второй системы привода на второй секции пути перемещения ленты, которая смещена ниже уровня нижней ветви.
Дополнительная натяжная каретка, установленная ниже пары нижних боковин с возможностью перемещения в боковом направлении относительно нижней ветви, служит опорой натяжного конвейерного барабана, который получает ленту на конце ниже по ходу движения относительно первой смещенной вниз секции пути перемещения ленты и направляет ленту к регулировочному ролику на входном конце нижней ветви. Избирательно-функционирующее устройство, такое как лебедка, предусмотрено для перемещения вспомогательной натяжной каретки, предназначенной для подматывания избыточной длины ленты таким образом, чтобы она имела надлежащее размещение для натяжных кареток систем привода.
Могут быть предусмотрены питающий конвейер и выдачной конвейер нижней ветви, причем питающий конвейер сходится до совмещения с 2входным концом нижней ветви над первой смещенной вниз секцией перемещения ленты, а выдачной конвейер расходится от совмещения с выходным концом нижней ветви над второй смещенной вниз секцией перемещения ленты. Питающий и выдачной конвейеры для верхней ветви совмещены с ней в боковом направлении. При этом подлежащие транспортированию по конвейеру грузы перемещаются по одной линии в направлениях к и от верхней и нижней ветвей приблизительно с равными скоростями.
В некоторых коммерческих применениях изобретения, например, при обработке багажа в аэропорте загрузка верхней и нижней ветвей конвейера может отличаться, даже до такой степени, что одна из ветвей может быть полностью загружена, а вторая может быть совершенно пустой. Результирующая неравная нагрузка на блоки привода первой и второй систем привода преимущественно компенсируется применением приводных двигателей переменного тока типа NEMA "B" и за счет использования гидромуфты между каждым приводным двигателем и редуктором скорости соответствующего блока привода.
Другие характеристики и особенности изобретения будут более понятны из последующего подробного описания варианта его осуществления, показанного на сопроводительных чертежах.
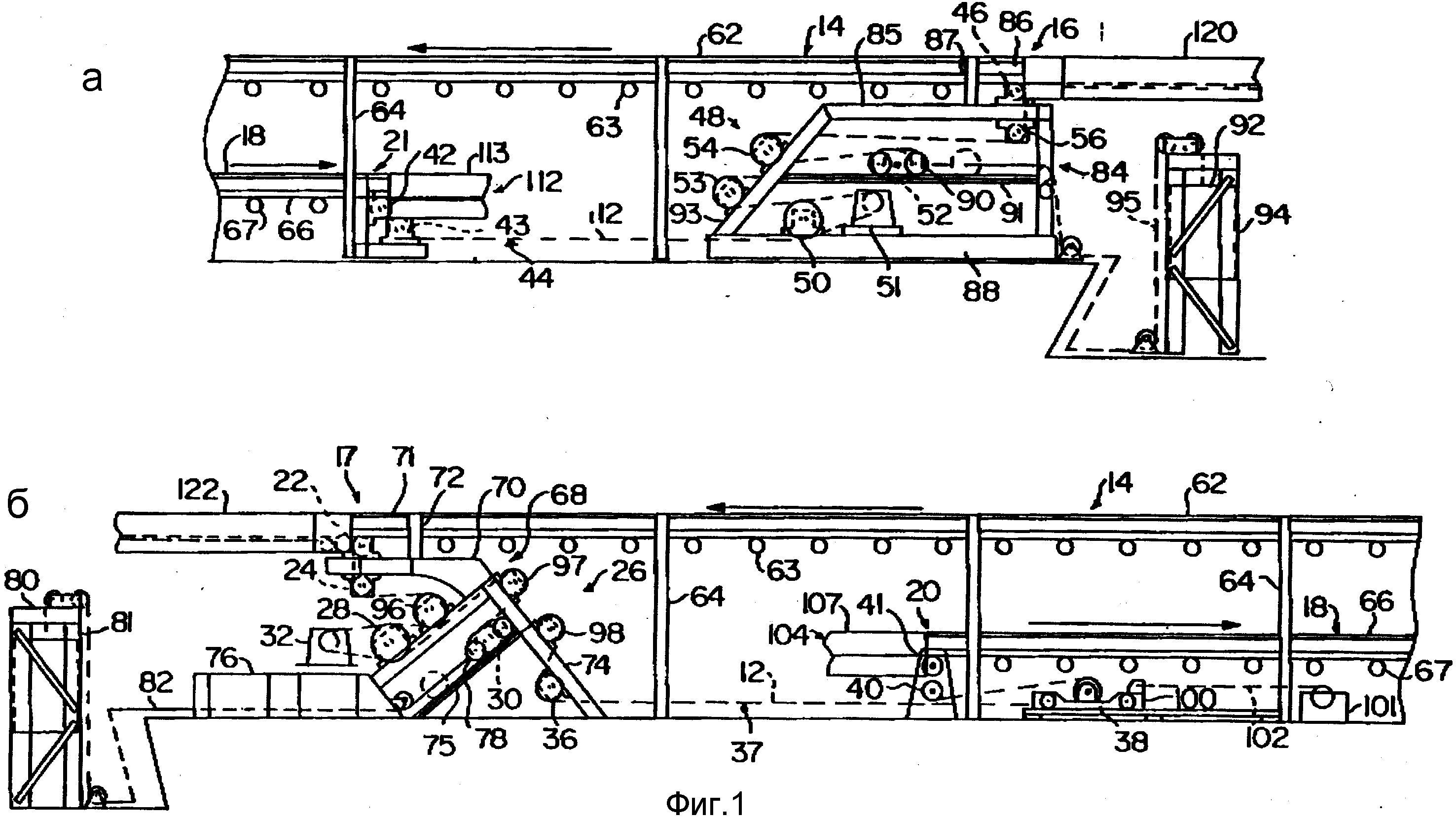
На фиг. 1а приведен вид сбоку, показывающий одну концевую часть ленточного конвейера, соответствующего изобретению.
На фиг. 1б приведен вид сбоку, показывающий противоположную концевую часть конвейера, показанного на фиг. 1а.
На фиг. 2а приведен вид сверху концевой части фиг. 1а.
На фиг. 2б показан вид сверху концевой части фиг. 1б.
На фиг. 3 приведен вид сбоку, соответствующий фиг. 2а, показывающий выдачной конвейер нижней ветви.
На фиг. 4 изображен вид сбоку, соответствующий фиг. 2б, показывающий питающий конвейер нижней ветви.
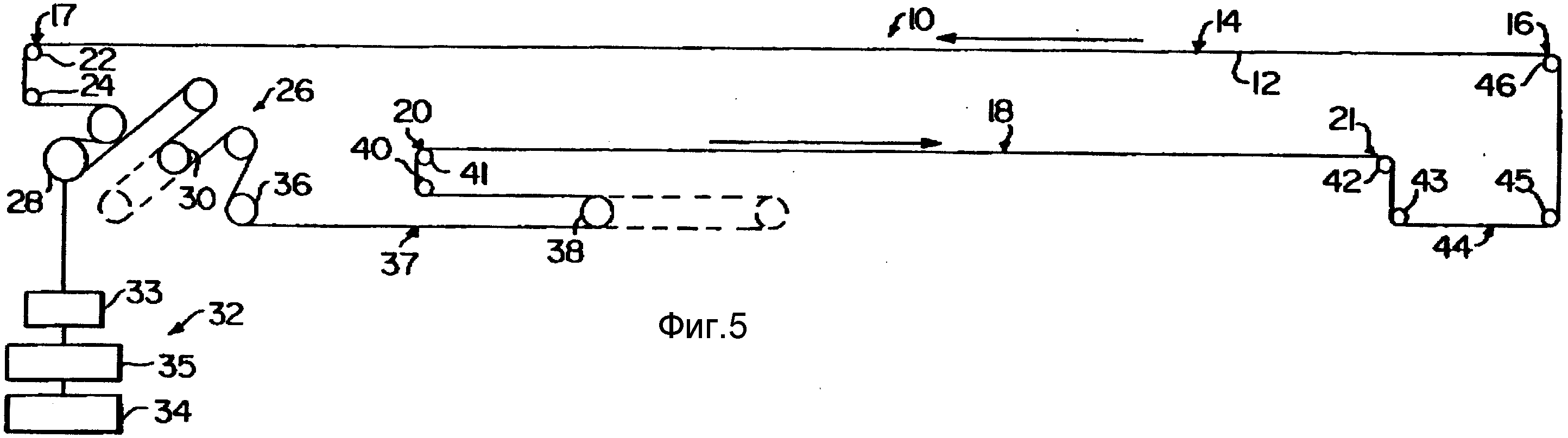
На фиг. 5 схематически показан вид спереди соответствующего изобретению ленточного конвейера, снабженного системой привода на одном из своих концов.
На фиг. 6 схематически изображен вид спереди соответствующего изобретению ленточного конвейера, снабженного системой привода на каждом из своих концов.
Обратимся к рассмотрению фиг. 5 и 6, на которых схематически показана (фиг. 5) бесконечная лента 12, установленная (при помощи описанных далее средств) с возможностью перемещения вдоль верхней несущей груз ветви 14, имеющей входной конец 16 и выходной конец 17; и вдоль нижней несущей груз ветви 18, смещенной в вертикальном направлении вниз относительно верхней ветви 14 и имеющей входной конец 20 и выходной конец 21, повернутые в противоположном направлении относительно входного и выходного концов верхней ветви конвейера. От выходного конца 17 верхней ветви 14, ограниченного оконечным роликом 22, лента 12 направляется при помощи направляющего ролика 24 в нижнем направлении к роликовому узлу системы привода 26, содержащему ролик привода ленты 28 и динамический натяжной (наматывающий) ролик 30, расположенный ниже по ходу движения относительно приводного ролика 28. Блок привода 32, подключенный к приводному ролику 28, содержит редуктор скорости 33, приводной двигатель 34 и гидромуфту 35, установленную между приводным двигателем и редуктором скорости.
Направляющий ролик 36, расположенный ниже по ходу движения относительно системы привода 26, посылает ленту 12 к входному концу 20 нижней ветви 18 вдоль секции 37 пути перемещения ленты, смещенной вниз относительно уровня нижней ветви 18. Вспомогательный натяжной ролик 38, расположенный ниже нижней ветви конвейера, может быть предусмотрен в этой смещенной вниз секции хода ленты, как это и показано на чертеже, а от этого натяжного ролика 38 лента 12 идет к ролику 40 регулировки ленты, установленному вертикально под оконечным роликом 41 ввода ленты, определяющим входной конец 20 нижней ветви 18.
На выходном конце 21 нижней ветви 18, определяемом оконечным роликом 42, имеется ролик регулировки ленты 43, установленный вертикально под оконечным роликом 42, который направляет ленту 12 вдоль другой секции 44 пути перемещения ленты, смещенной ниже уровня нижней ветви 18, к направляющему ролику 45, от которого лента 12 идет к оконечному ролику 46, определяющему входной конец 16 верхней ветви 14.
На фиг. 6 показан соответствующий изобретению ленточный конвейер 10, снабженный роликовым узлом второй системы привода 48, расположенным между выходным концом 21 нижней ветви 18 и входным концом 16 верхней ветви 14 конвейера, и содержащим приводной ролик 50, подключенный к блоку привода 51, и динамическим натяжным (наматывающим) роликом 52, расположенным ниже по ходу движения относительно приводного ролика. Направляющие ролики 53 и 54 определяют путь перемещения ленты 12 вокруг приводного ролика 50, от приводного ролика вокруг натяжного ролика 52 и от натяжного ролика в направлении к входному концу 16 верхней ветви 14, снабженному регулировочным роликом 56, установленным вертикально под оконечным роликом 46. Блок привода 51, аналогичный блоку привода 32, содержит редуктор скорости 58, приводимый в движение от мотора 59 через гидромуфту 60.
Подробности построения показанного на фиг. 6 конвейера 10 многоприводного типа, совместно с питающим и выдачным конвейерами для перемещения в "линию" подлежащих транспортированию по конвейеру грузов к входному концу и от выходного конца каждой из верхней и нижней несущих груз ветвей 14 и 18, иллюстрируются чертежами фиг. 1а - фиг. 4. На этих чертежах одинаковыми позициями обозначены элементы, идентичные показанным на фиг. 6 соответствующим элементам конвейера 10. На фиг. 1а, 2а и 3 показана конвейерная система на входном конце 16 верхней ветви 14 и на выходном конце 21 нижней ветви 18; на фиг. 1б, 2б и 4 показана конвейерная система на выходном конце 17 верхней ветви и на входном конце 20 нижней ветви.
Показанный на этих чертежах конвейер 10 содержит пару верхних боковин 62, имеющих серии верхних направляющих роликов 63, предусмотренных для поддержки бесконечной ленты 12, перемещающейся по верхней несущей нагрузку ветви 14, причем боковины 62 установлены парами на вертикальных опорах 64, размещенных на соответствующем расстоянии друг от друга вдоль длины конвейера. Пара нижних боковин 66 закреплена на опорах 64 вертикально под верхними боковинами и несет серии нижних направляющих роликов, которые поддерживают ленту 12 конвейера при ее перемещении вдоль нижней несущей нагрузку ветви 18. Система привода 26, именуемая в дальнейшем как первая система привода, расположена между выходным концом 17 верхней ветви и входным концом 20 нижней ветви, как это показано на фиг. 1б и 2б; а вторая система привода 48 расположена между выходным концом 21 нижней ветви и входным концом 16 верхней ветви, как это показано на фиг. 1а и 2а.
Первая система привода 26 содержит раму 68, установленную под парой верхних боковин 62. Эта рама 68 содержит верхний горизонтальный участок 70 для поддержания концов 71 боковин при помощи пары вертикальных постов 72 и для поддержания вертикального выравнивания оконечного ролика выходного конца 22 верхней ветви и регулировочного ролика 24, установленного под оконечным роликом. В наклонном направлении вниз от верхнего участка 70 и в направлении к входному концу нижней ветви идет участок 74 рамы, от которого перпендикулярно отходит в нижнем направлении наклонный участок 75, имеющий верхний и нижний уровни. Ролик 28 привода ленты связан с верхним уровнем участка 75 рамы и соединен с приводным блоком 32, установленным на цокольном основании 76 рамы. На нижнем уровне идущего вниз наклонного участка 75 рамы установлена с возможностью перемещения натяжная каретка 78, на которой установлен натяжной ролик 30, причем каретка 78 и ролик 30 динамически смещены для приложения натяжения к ленте 12 при помощи противовеса 80, установленного на опорной раме 81, удаленной от рамы 68, и соединенного с натяжной кареткой 78 тросом 82.
Рама 84 второй системы привода 48 установлена аналогично описанному под парой верхних боковин 62. Верхний горизонтальный участок 85 рамы поддерживает входные концы 86 верхних боковин 62 при помощи вертикальных постов 87, а также поддерживает пару вертикально смещенных роликов, состоящих из оконечного ролика 46, определяющего входной конец верхней ветви, и регулировочного ролика 56. Базовая часть 88 рамы 84 поддерживает ролик 50 привода ленты и приводной блок 51. Натяжная каретка 90, на которой установлен натяжной ролик 52, установлена с возможностью перемещения на участке рамы 91, расположенном между верхним и нижним участками рамы 85 и 88, и соединенном с вертикальной опорой и наклонной опорой 93. Натяжная каретка динамически смещена в таком направлении, чтобы прикладывать натяжение к ленте 12 от противовеса 92, подвешенного на отдельной конструкции 94, соединенного тросом 95 с кареткой 90.
Обратимся вновь к первой системе привода 26, показанной на фиг. 1б, где бесконечная лента 12 перемещается от оконечного ролика 22 на выходном конце 17 верхней ветви 14 к регулировочному ролику 24, и от регулировочного ролика 24 по пути перемещения, который определяется последовательными направляющими роликами 96, 97 и 98, установленными на раме 68, причем этот путь проходит вокруг приводного ролика 28, вокруг натяжного ролика 30 и в направлении вниз вокруг направляющего ролика 36 к входному концу 20 нижней ветви 18 вдоль смещенной вниз секции 37 пути перемещения ленты. Дополнительный натяжной барабан 38, предусмотренный в этой секции 37, установлен на каретке 100, установленной в свою очередь на рельсах ниже боковин 66 нижней ветви для перемещения в боковом направлении этой каретки избирательным воздействием соответствующего устройства, такого как лебедка 101, связанная с кареткой тросом 102. Натяжной барабан 38 получает ленту 12 от направляющего ролика 36 ниже по ходу перемещения ленты относительно первой системы привода 26 и направляет ленту к регулировочному и оконечному роликам 40, 41 на входном конце нижней ветви.
На выходном конце 21 нижней ветви, показанном на фиг. 1а, лента 12 проходит над оконечным роликом 42 и направляется вниз под регулировочный ролик 43 для перемещения по второй смещенной вниз секции 44 к приводному ролику 50 второй системы привода 48. Направляющие ролики 53 и 54, установленные на косой опоре 93 рамы 84, направляют ленту 12 вокруг приводного ролика 50 к натяжному ролику 52 и от натяжного ролика к регулировочному ролику 56, расположенному ниже входного конца 16 верхней ветви.
Как показано на фиг. 1б, 2б и 4, питающий конвейер нижней ветви 104 сходится в боковом направлении для выравнивания с нижней ветвью 18 на входном конце 20 последней и содержит основной питающий конвейер 105, первую изогнутую секцию конвейера 106 и вторую изогнутую в противоположном направлении секцию конвейера 107. Основной питающий конвейер 105 расположен параллельно пути перемещения ленты 12, заканчивается с одной из сторон на уровне первой системы привода 68 и снабжен приводным блоком 108; первая изогнутая секция конвейера 106 идет от основного питающего конвейера в направлении к пути перемещения ленты 12, заканчивается на одной из своих сторон (при достижении касания с лентой) и снабжена приводным блоком 109; а вторая изогнутая секция конвейера 107, снабженная приводным блоком 110, идет от первой изогнутой секции конвейера к входному концу 20 нижней ветви над уровнем смещенной вниз секции 37 пути перемещения ленты 12. Приводные блоки 108, 109 и 110 этих последовательных питающих конвейеров независимы друг от друга и работают с постепенно увеличивающейся скоростью, так что скорость второго конвейера 107 приближается к скорости или приблизительно равна скорости, с которой перемещается лента 12.
Расположенный напротив выдачной конвейер нижней ветви 112, показанный на фиг. 1а, 2а и 3, расходится в боковом направлении от выравнивания с выходным концом 21 нижней ветви над второй смещенной вниз секцией 44 пути перемещения ленты 12. Изогнутая секция конвейера 113 идет от выходного конца 21 к изогнутой в противоположном направлении секции конвейера 114, которая, в свою очередь, переходит в основной выдачной конвейер нижней ветви 115, расположенный с одной из сторон рамы 84 второй системы привода и идущий в направлении, параллельном пути перемещения ленты 12. Для конвейеров 113, 114 и 115 предусмотрены соответствующие независимые блоки привода 116, 117 и 118, которые могут работать с постепенно уменьшающимися скоростями от скорости, равной или приближающейся к скорости перемещения ленты 12.
Питающий конвейер верхней ветви 120, приводимый в движение при помощи блока привода 121, идет от входного конца 16 верхней ветви 14 конвейера 10, как это показано на фиг. 1а и 2а. На фиг. 1б и 2б показан выдачной конвейер верхней ветви 122, идущий от выходного конца 17 верхней ветви 14 и снабженный приводным блоком 124.
Питающий и выдачной конвейеры верхней ветви 120 и 122 совместно с питающим и выдачным конвейерами нижней ветви 104 и 112 обеспечивают передачу "в линию" подлежащих транспортированию на конвейере грузов к и от верхней и нижней ветвей 14 и 18 конвейера 10, причем привод может осуществляться либо от одной системы привода, как это схематически показано на фиг. 5, либо при помощи нескольких систем привода, как это показано на фиг. 1а-4 и 6. Эта передача (перемещение груза) облегчается преимущественным использованием роликов, которые имеют диаметр, не превышающий 150 мм, для оконечных роликов 46 и 22 на входном и выходном концах 16 и 17 верхней ветви 14 и для выходных роликов 41 и 42 на входном и выходном концах нижней ветви 18. Обхват ленты 12 вокруг каждого оконечного ролика ограничен 90o за счет спаренного регулировочного ролика, установленного с выравниванием по вертикали.
Наличие для конвейера 10 одной или нескольких систем привода зависит главным образом от длины конвейера 10 и от максимальной требуемой перемещаемой нагрузки. Для конвейера 10, имеющего единственную систему привода 26, такую как показанная на фиг. 5 (конструкция которой приведена на фиг. 1B), блок привода 32 преимущественно содержит гидромуфту 35 с целью ограничения силы ускорения, передаваемой к ленте 12 при пуске, в особенности в случае ленты с грузом, что позволяет устранить ударные нагрузки на привод и проскальзывание между приводным роликом и лентой 12.
Положительная сила тяги между приводным роликом 28 и лентой 12 зависит от натяжения, прикладываемого к ленте противовесом за счет смещающего перемещения натяжной каретки 78, на которой установлен натяжной ролик 30. Это натяжение должно иметь такую величину, чтобы нулевое натяжение не могло существовать ни в одной точке ленты 12 в застопоренном положении. Для защиты от потери этого натяжения предусмотрен ограничитель, который установлен таким образом, что он приводится в действие натяжной кареткой 78 при существенной потере расстояния перемещения и выключает приводной блок 32. Если такое низкое натяжение, приводящее к отключению приводного блока, вызвано слабым натяжением ленты 12, то избыток длины ленты может быть поглощен за счет работы лебедки 101, подключенной к каретке 100 вспомогательным статическим натяжным роликом 38, возвращающей динамическую натяжную каретку 78 в надлежащее рабочее положение.
Конвейер 10, в котором лента 12 приводится в движение при помощи первой и второй систем привода 26 и 48, требует дополнительного рассмотрения при проектировании. Установка этих систем привода на противоположных концах конвейера приводит к непрерывному (постоянному), не прерывающемуся движению верхней и нижней несущих нагрузку ветвей 14 и 18 и загрузке и разгрузке "в линию" этих ветвей при помощи питающего и выдачного конвейеров верхней и нижней ветвей. Действительная нагрузка этих ветвей во время работы конвейера может изменяться до крайнего состояния, в котором одна ветвь полностью загружена, а вторая полностью не загружена.
При использовании ленты 12 стандартного фабричного изготовления, имеющей некоторую упругость, что является предпочтительным, неравная загрузка верхней и нижней ветвей 14 и 18 приводит к неравному растяжению ленты на этих ветвях. Эта проблема неравного растяжения может быть разрешена предусмотрением динамических натяжных роликов 30 и 52, установленных непосредственно сразу же за приводными роликами 28 и 50 соответствующих первой и второй систем привода. Однако неравная загрузка верхней и нижней ветвей 14 и 18 будет также вызывать неравную загрузку приводных двигателей 34 и 59 первой и второй систем привода и вызывать различие в скорости между двумя двигателями. Так как более быстрый двигатель из двух загружен меньше, то его приводной ролик будет добавлять растягивающее усилие к менее загруженной ветви ленты и будет пытаться растягивать ленту, чтобы скомпенсировать любую разницу длины ленты в результате ее растяжения грузом. В результате менее нагруженный двигатель будет добавлять себе нагрузку и одновременно будет замедляться и стремиться поделить нагрузку с другим двигателем. Каркас ленты при этом возрастающем натяжении становится эффективной механической связью, которая будет вызывать распределение нагрузки между двумя приводными блоками на определенном временном периоде и которая будет зависеть главным образом от модуля упругости ленты 12 и от расстояния между двумя системами привода.
Компенсация неравной нагрузки частично обеспечивается преимущественно за счет использования стандартных электродвигателей переменного тока типа NEMA "B" с типичными крутящими моментами и токовыми характеристиками в качестве приводных двигателей 34 и 59 двух приводных блоков 33 и 51. Такие двигатели переменного тока NEMA "B" являются чувствительными к нагрузке и имеют характеристику проскальзывания, которая может преодолеть различие в нагружении. Гидромуфты 35 и 60, установленные между приводными двигателями 34 и 59 и их соответствующими редукторами скорости 33 и 58, предназначены для сглаживания ускорения нагруженного конвейера 10 и также способствуют дополнительной балансировке нагрузки. Такая дополнительная балансировка нагрузки компенсирует также изменение жесткости ленты 12, возникающее при ее износе, которое вызывает тенденцию увеличения временного интервала, потребного для осуществления распределения нагрузки.
Когда производится первоначальная установка конвейера 10, имеющего две системы привода, производится первоначальное натяжение ленты 12 в статических условиях. Так как размах перемещения динамических натяжных роликов 30 и 52 относительно ограничен из соображений компактности систем привода 26 и 48, приводится в действие статическая натяжная лебедка 101 для устранения слабины при установке и обеспечения натяжения ленты 12, а также для выбора надлежащего положения кареток 78 и 90 динамических натяжных устройств. После этой начальной регулировки натяжения производится пуск приводных блоков 32 и 51 и конвейер приводится в действие до удаления неравномерного провисания ленты 12 между опорными роликами 63 и 67 верхней и нижней ветвей 14 и 18 и достижения стабильных условий натяжения для всей ленты 12. Эта операция, включая и повторную установку положения динамических натяжных кареток при помощи статического натяжного устройства, может потребовать многократного повтора для достижения такого начального натяжения, при котором провисание ленты 12 между последовательными опорными роликами 63 и 67 минимальное, и при этом ни в одной точке ленты 12 нет в застопоренном положении нулевого натяжения. Провисание между последовательными опорными роликами вызывает вертикальное перемещение подлежащих транспортированию на конвейере грузов и приложение ударов к опорным роликам, которые могут повредить каркас ленты 12.
Конвейер 10 с несколькими приводами предназначен для работы при перемещении грузов на относительно длинные расстояния (например, около 450 метров) и при относительно высокой скорости (например, около 150 метров в минуту), и может быть использован в сочетании с питающим и выдачным конвейерами, предусмотренными для транспортирования в двустороннем направлении грузов при изменяющихся характеристиках нагрузки, таких как существующие при обработке отправляемого и принимаемого багажа в аэропорту.
Реферат
Изобретение относится к конвейерной ленточной системе. Ленточный конвейер имеет смещенные вертикально друг от друга и движущиеся в противоположном направлении верхнюю и нижнюю несущие нагрузку ветви, имеющие входной и выходной концы. Первая серия роликов, расположенная между выходным концом верхней ветви и входным концом нижней ветви, посылает ленту в нижнем направлении вокруг первой системы привода к входному концу нижней ветви вдоль первой смещенной вниз секции пути перемещения ленты, идущей ниже уровня нижней ветви, и в верхнем направлении к входному концу нижней ветви от статического натяжного устройства, установленного ниже нижней ветви. Вторая серия роликов, расположенная между выходным концом нижней ветви и входным концом верхней ветви, посылает ленту в нижнем направлении от выходного конца нижней ветви вдоль второй смещенной вниз секции пути перемещения ленты, расположенной ниже уровня нижней ветви, вокруг второй системы привода и в верхнем направлении к входному концу верхней ветви. Питающий и выдачной конвейеры нижней ветви, размещенные соответственно над первой и второй смещенными вниз секциями пути перемещения ленты, сходятся до совмещения и расходятся от совмещения с входным и выходным концами нижней ветви для передачи "в линию" грузов к нижней ветви и от нее. Питающий и выдачной конвейеры верхней ветви выравнены в боковом направлении с входным и выходным концами верхней ветви. Обеспечивается транспортирование по одной прямой в двустороннем направлении грузов при изменяющихся характеристиках нагрузки. 2 с. и, 6 з.п. ф-лы, 6 ил.
Комментарии