Многонаправленный роликовый узел - RU2632239C2
Код документа: RU2632239C2
Чертежи








Описание
РОДСТВЕННЫЕ ЗАЯВКИ
В настоящем изобретении испрашивается приоритет по предварительной заявке на патент США №61/592,708, поданной 31 января 2012 года, содержание которой включено сюда посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
В общем, изобретение относится к транспортерам с механическим приводом, а более конкретно, к транспортерам, имеющим приводимые в действие, многонаправленные ролики для управления траекторией изделий через транспортерную систему.
Многие области применения транспортировки упаковки и материалов требуют, чтобы перемещаемые изделия отводились к боковой стороне транспортера. Двумя примерами являются сортировка изделий с боковой стороны ленты и регистрация изделий напротив боковой стороны ленты. В патенте США №6,494,312, "Modular Roller-Top Conveyor Belt with Obliquely-Arranged Roller", 17 Декабря 2002 года, Costanzo, раскрыта транспортерная система, в которой цилиндрические ролики, установленные в транспортерной ленте на осях, наклонных к направлению движения ленты, приводятся в действие расположенными внизу поверхностями подшипников, на которых наклонные ролики движутся по мере продвижения ленты в направлении движения ленты. Контакт между роликами и поверхностями подшипников заставляет ролики вращаться по мере продвижения ленты. Вращение наклонных роликов толкает изделия поверх роликов поперек транспортерной ленты в направлении боковой стороны транспортера. Данные ленты с наклонными роликами действуют очень хорошо на плоских поверхностях подшипников при условии, что ролики выполнены с возможностью вращения под углом между направлением движения ленты (определяемым, как угол ролика, равный 0°) и приблизительно 30° или около того от направления движения ленты. Для углов роликов больше чем 30°, на плоских поверхностях подшипников проскальзывание роликов является слишком сильным.
В патенте США №6,968,941, "Apparatus and Methods for Conveying Objects", 29 Ноября 2005 года, Fourney, описана усовершенствованная поверхность подшипника, которая приспособлена к значительно большему диапазону углов роликов. Вместо использования плоской поверхности подшипника, Fourney использует внешние периферии приводящих в движение роликов, выполненных с возможностью вращения на осях в направлении движения ленты. По мере продвижения транспортерной ленты, наклонные ролики ленты крутятся на расположенных внизу приводящих в движение роликах, которые также вынуждены крутиться на своих осях. Вследствие того, что поверхность подшипника на периферии крутится, проскальзывание уменьшается, и могут обеспечиваться более большие углы роликов. Более большие углы роликов допускают траектории со значительно более острым отклонением изделий, чем возможны с плоской поверхностью подшипника. Но приводящие в движение ролики являются более дорогими и немного более сложными, чем простые плоские поверхности подшипников.
В патенте США №7,588,137, "Conveyor Belt Having Rollers that Displace Objects", 15 Сентября 2009 года, Fourney, описана транспортерная лента, которая содержит множество наборов роликов, используемых для отведения объектов с транспортерной ленты. Углы, вдоль которых изделия могут отводиться с транспортера, ограничены.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В варианте осуществления представленного изобретения предлагается многонаправленный роликовый узел, содержащий выполненную с возможностью поворота раму ролика, вмещающую по меньшей мере один набор взаимно приводящих в движение роликов. Многонаправленный роликовый узел направляет изделие, поддерживаемое узлом, вдоль траектории, определяемой ориентацией многонаправленного роликового узла относительно входного усилия. Ориентацию многонаправленного роликового узла можно изменять для изменения траектории. Транспортерная система может содержать множество многонаправленных роликовых узлов. Исполнительный механизм регулирует ориентацию многонаправленных роликовых узлов по отдельности, а также может регулировать множество многонаправленных роликовых узлов в виде группы.
Согласно одному аспекту изобретения, многонаправленный роликовый узел содержит раму, выполненную с возможностью поворота вокруг главной оси, и по меньшей мере один набор взаимно приводящих в движение роликов, установленных на раму. Каждый ролик выполнен с возможностью вращения вокруг второстепенной оси, которая расположена поперек главной оси.
Согласно еще одному аспекту изобретения, роликовая пластина содержит верхнюю пластину, имеющую множество отверстий, нижнюю пластину, имеющую множество отверстий, согласованных с множеством отверстий в верхней пластине, и множество многонаправленных роликовых узлов, расположенных в отверстиях. Каждый многонаправленный роликовый узел содержит раму, выполненную с возможностью поворота вокруг главной оси, и по меньшей мере один набор роликов, установленных на раму, при этом каждый ролик выполнен с возможностью вращения вокруг второстепенной оси, которая расположена поперек главной оси.
Согласно еще одному аспекту изобретения, транспортерная система содержит множество многонаправленных роликовых узлов, при этом каждый многонаправленный роликовый узел содержит раму, выполненную с возможностью поворота вокруг главной оси, и по меньшей мере один набор роликов, установленных на раму, при этом каждый ролик выполнен с возможностью вращения вокруг второстепенной оси, которая расположена поперек главной оси. Приводное устройство, которым может быть транспортерная лента, вызывает вращение одного из рамы и одного набора роликов.
Согласно еще одному аспекту изобретения предложен способ направления изделия транспортировочного средства с использованием многонаправленного роликового узла. Многонаправленный роликовый узел содержит раму, выполненную с возможностью поворота вокруг главной оси, и по меньшей мере один ролик, выполненный с возможностью вращения вокруг второстепенной оси, которая расположена поперек главной оси. Способ включает помещение изделия в контакт с многонаправленным роликовым узлом и приложение входного усилия к многонаправленному роликовому узлу с входным углом относительно главной оси, вызывая поворот по меньшей мере одного из рамы и ролика таким образом, что изделие выталкивается из многонаправленного роликового узла с выходным углом, который по меньшей мере в два раза больше входного угла.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Данные аспекты и признаки изобретения, а также его преимущества, объясняются более подробно в следующем описании, приложенной формуле изобретения и на сопровождающих чертежах, на которых:
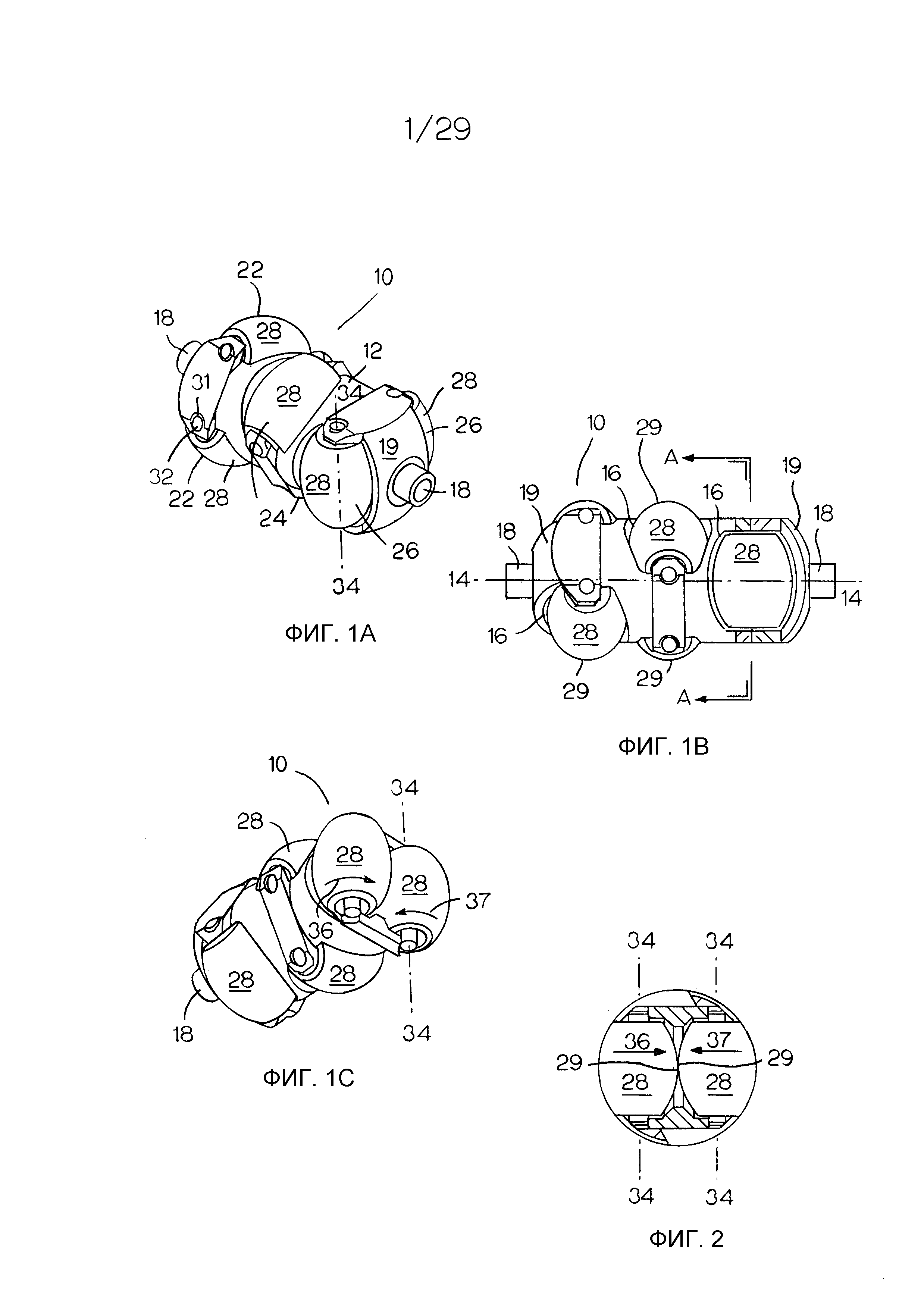
Фиг. 1A представляет собой перспективное изображение многонаправленного роликового узла согласно иллюстративному варианту осуществления изобретения;
Фиг. 1B представляет собой вид сбоку многонаправленного роликового узла Фиг. 1A;
Фиг. 1C иллюстрирует многонаправленный роликовый узел Фиг. 1A и 1В без торцевой крышки;
Фиг. 2 представляет собой вид в поперечном разрезе набора роликов многонаправленного роликового узла Фиг. 1A-1C по линиям A-A;
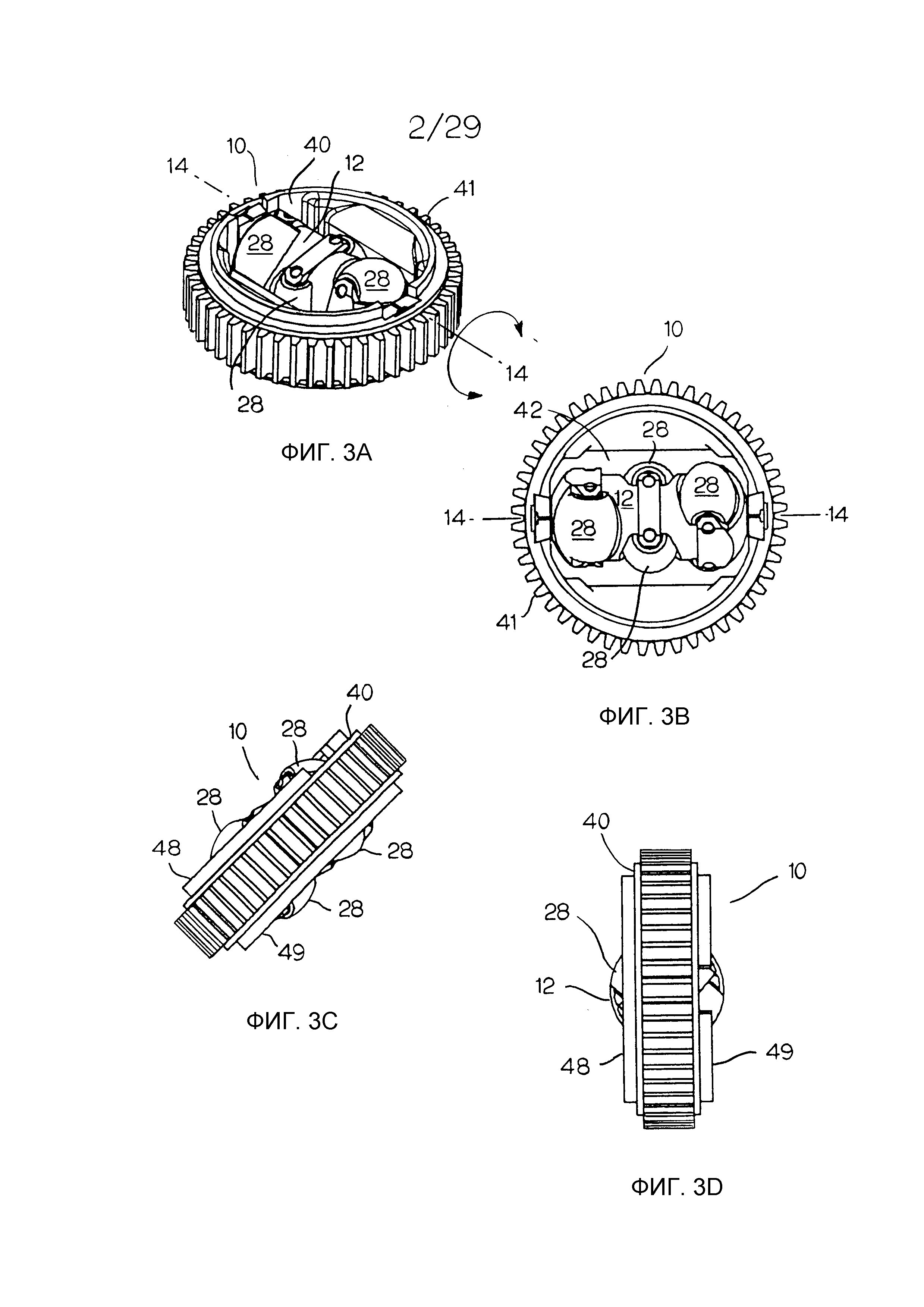
Фиг. 3A представляет собой перспективное изображение многонаправленного роликового узла, содержащего корпус ролика;
Фиг. 3B представляет собой вид сверху многонаправленного роликового узла Фиг. 3A;
Фиг. 3C представляет собой вид сбоку многонаправленного роликового узла Фиг. 3A;
Фиг. 3D представляет собой вид спереди многонаправленного роликового узла Фиг. 3A;
Фиг. 4 представляет собой изображение в разобранном виде многонаправленного роликового узла Фиг. 3A;
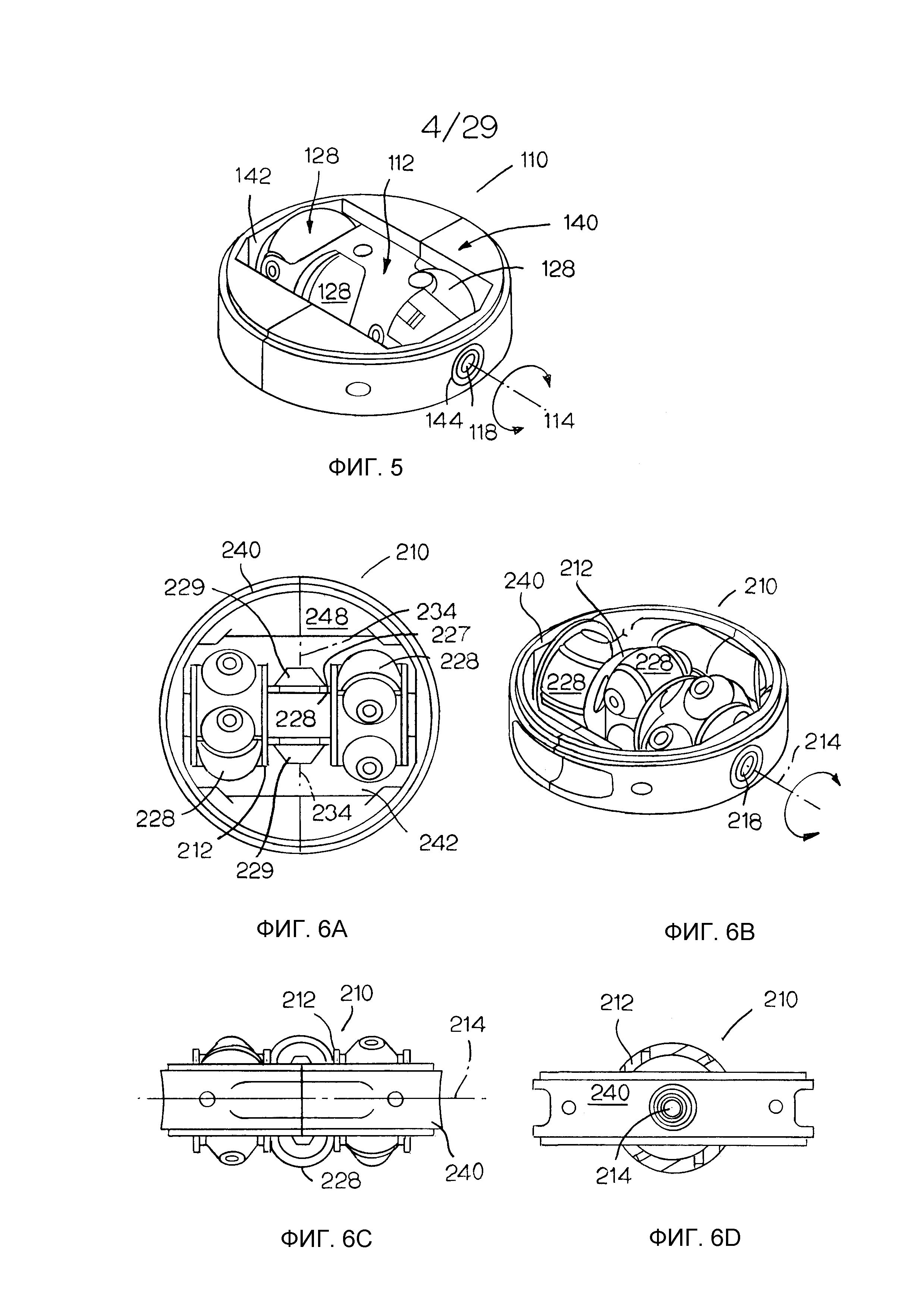
Фиг. 5 представляет собой перспективное изображение еще одного варианта осуществления многонаправленного роликового узла;
Фиг. 6A представляет собой вид сверху еще одного варианта осуществления многонаправленного роликового узла;
Фиг. 6B представляет собой перспективное изображение многонаправленного роликового узла Фиг. 6A;
Фиг. 6C представляет собой вид сбоку многонаправленного роликового узла Фиг. 6A;
Фиг. 6D представляет собой вид спереди многонаправленного роликового узла Фиг. 6A;
Фиг. 7 представляет собой изображение в разобранном виде многонаправленного роликового узла Фиг. 6A;
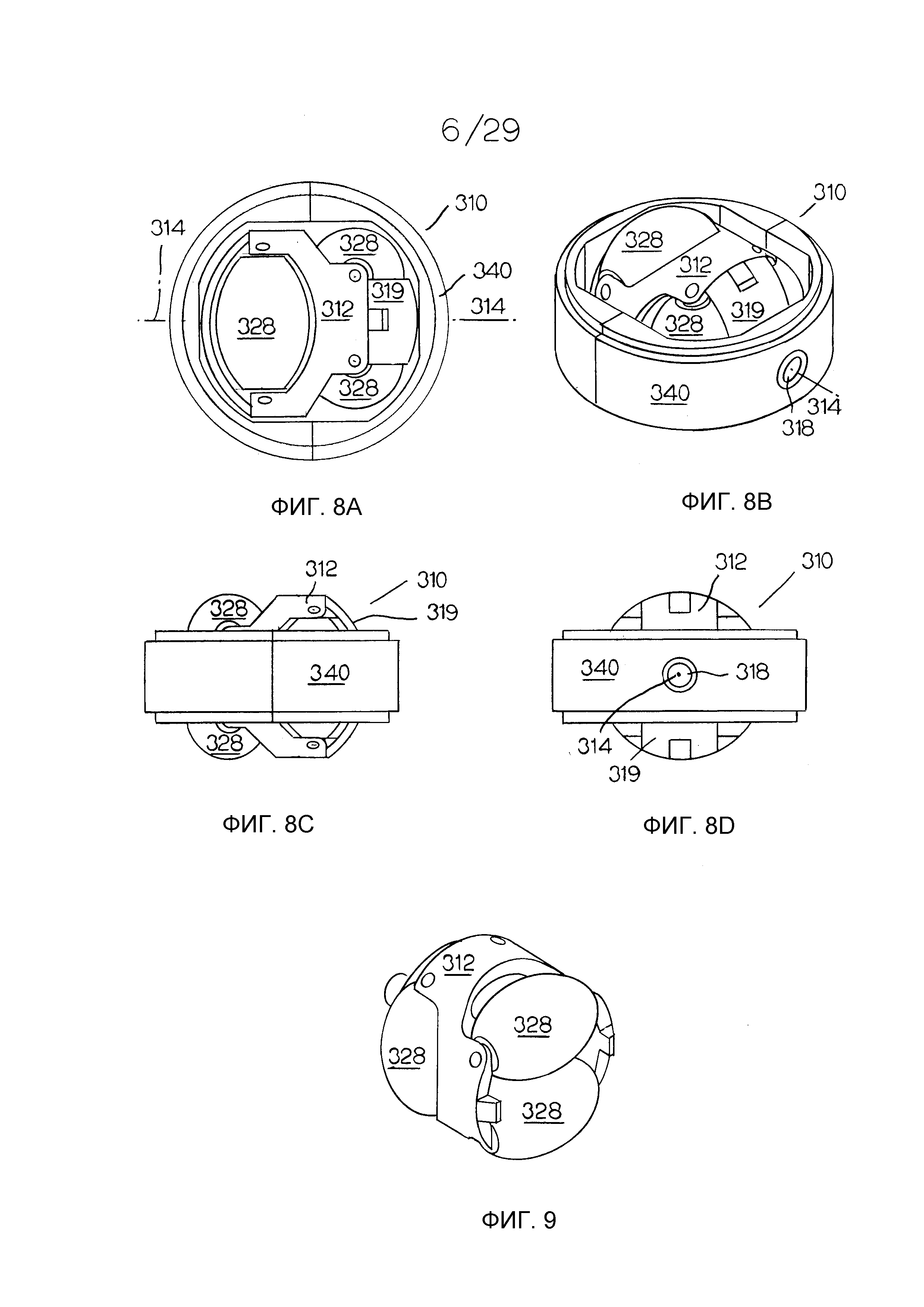
Фиг. 8A представляет собой вид сверху еще одного варианта осуществления многонаправленного роликового узла, содержащего две пары роликов;
Фиг. 8B представляет собой перспективное изображение многонаправленного роликового узла Фиг. 8A;
Фиг. 8C представляет собой вид сбоку многонаправленного роликового узла Фиг. 8A;
Фиг. 8D представляет собой вид спереди многонаправленного роликового узла Фиг. 8A;
Фиг. 9 иллюстрирует многонаправленный роликовый узел Фиг. 8A-8D без торцевой крышки или корпуса;
Фиг. 10A представляет собой вид сверху многонаправленного роликового узла, когда входное усилие приложено перпендикулярно главной оси;
Фиг. 10B представляет собой вид сбоку многонаправленного роликового узла Фиг. 10A;
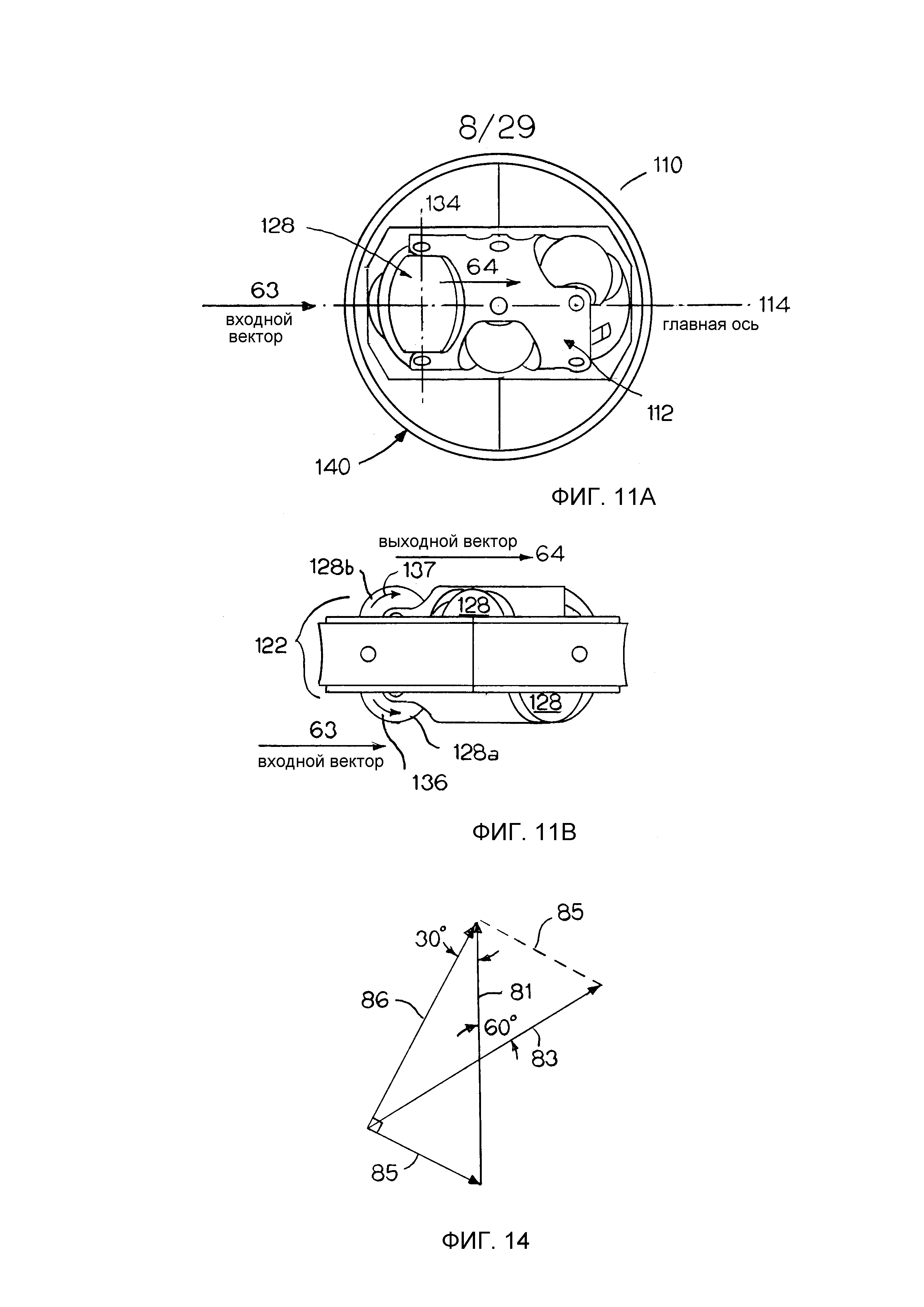
Фиг. 11А представляет собой вид сверху многонаправленного роликового узла, когда входное усилие приложено параллельно главной оси;
Фиг. 11B представляет собой вид сбоку многонаправленного роликового узла Фиг. 11А;
Фиг. 12A представляет собой вид сверху многонаправленного роликового узла, когда входное усилие прикладывают под углом 45° к главной оси;
Фиг. 12B представляет собой вид сбоку многонаправленного роликового узла Фиг. 12A;
Фиг. 13 представляет собой вид сверху многонаправленного роликового узла, когда входное усилие прикладывают под углом 30° относительно главной оси;
Фиг. 14 иллюстрирует взаимоотношение между входным вектором, выходным вектором рамы, выходным вектором ролика и выходным вектором узла для многонаправленного роликового узла Фиг. 13;
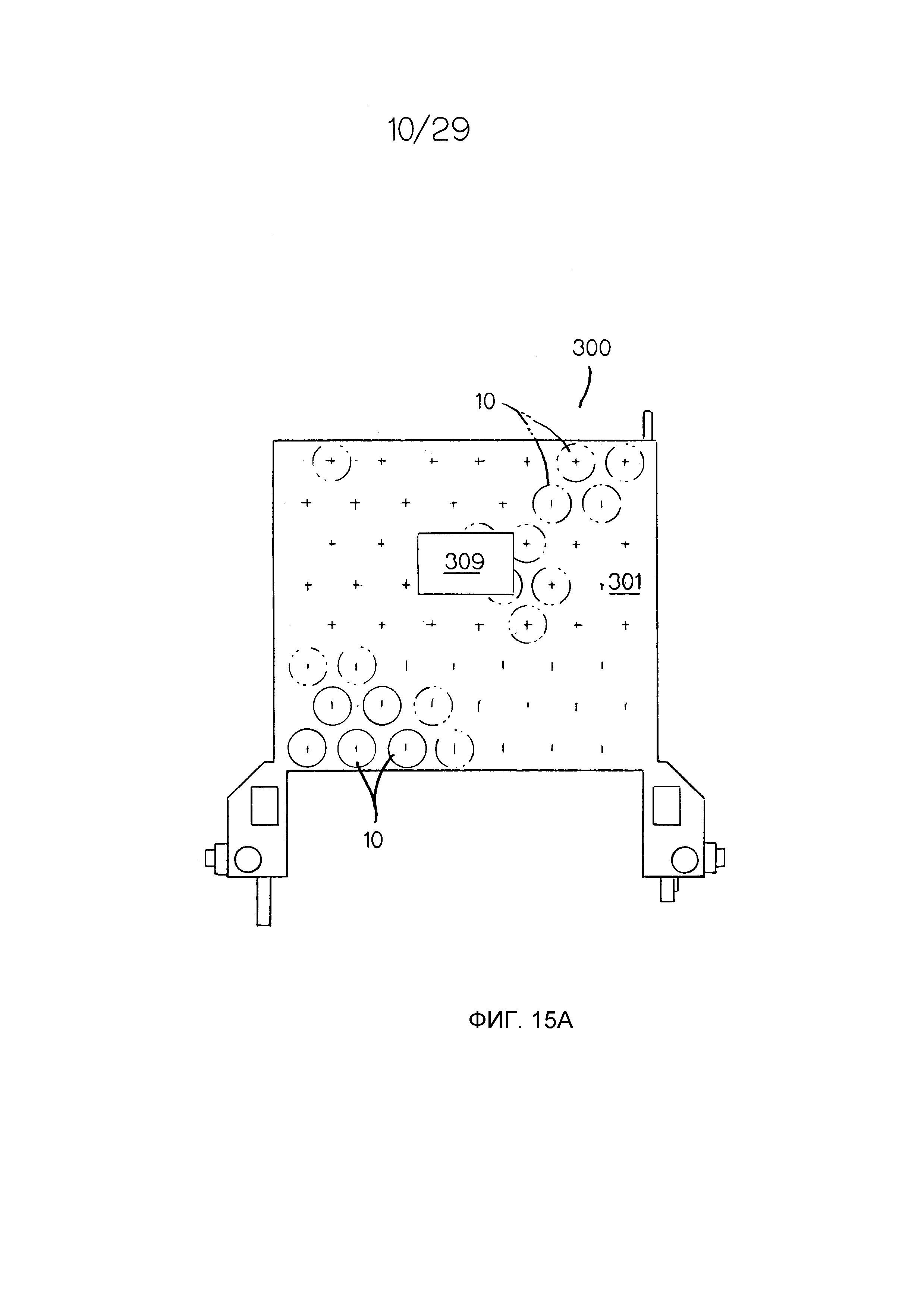
Фиг. 15A представляет собой вид сверху роликовой пластины, вмещающей множество многонаправленных роликовых узлов согласно иллюстративному варианту осуществления изобретения;
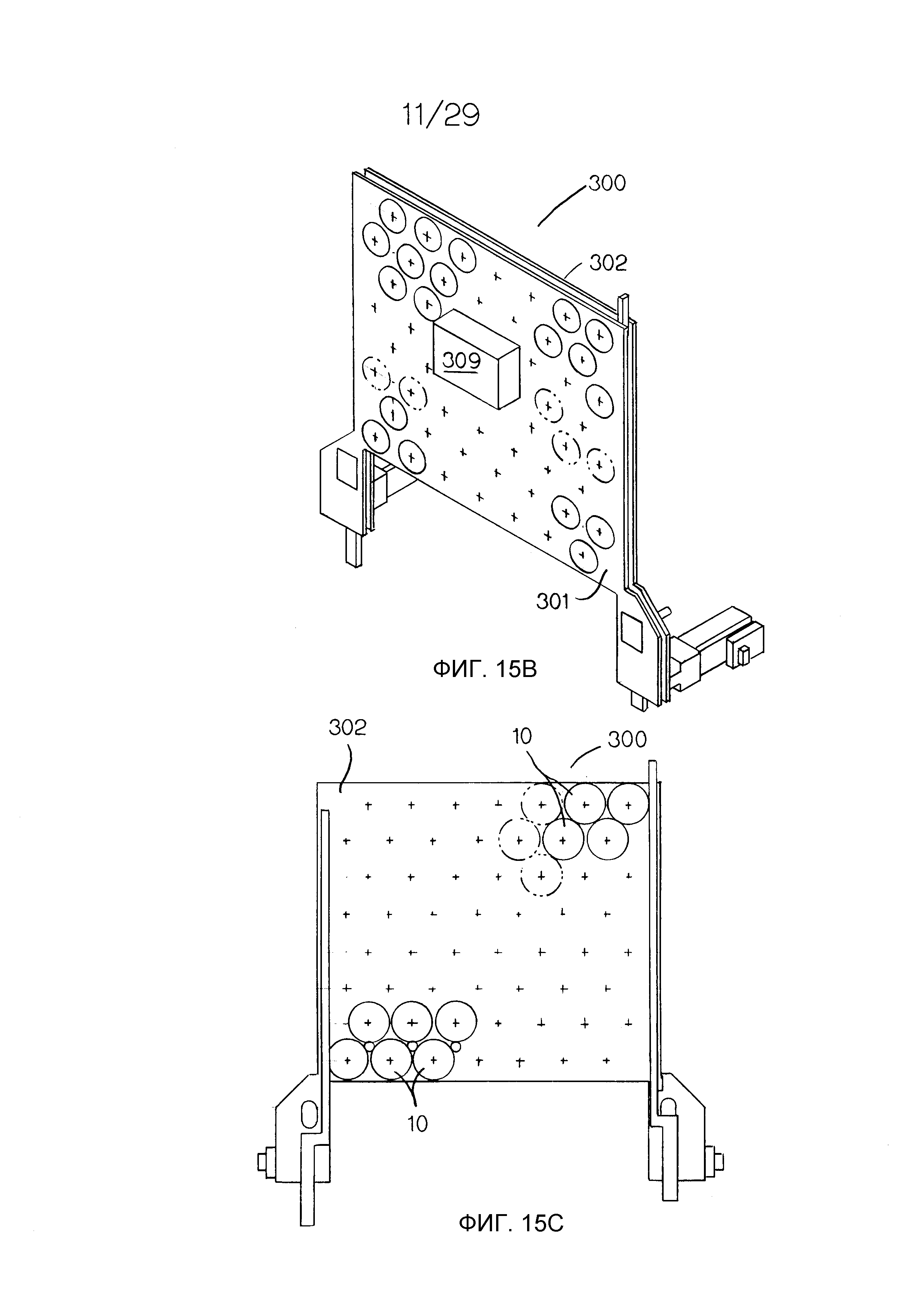
Фиг. 15B представляет собой перспективное изображение роликовой пластины Фиг. 15A;
Фиг. 15C представляет собой вид сверху роликовой пластины Фиг. 15A с удаленной верхней пластиной;
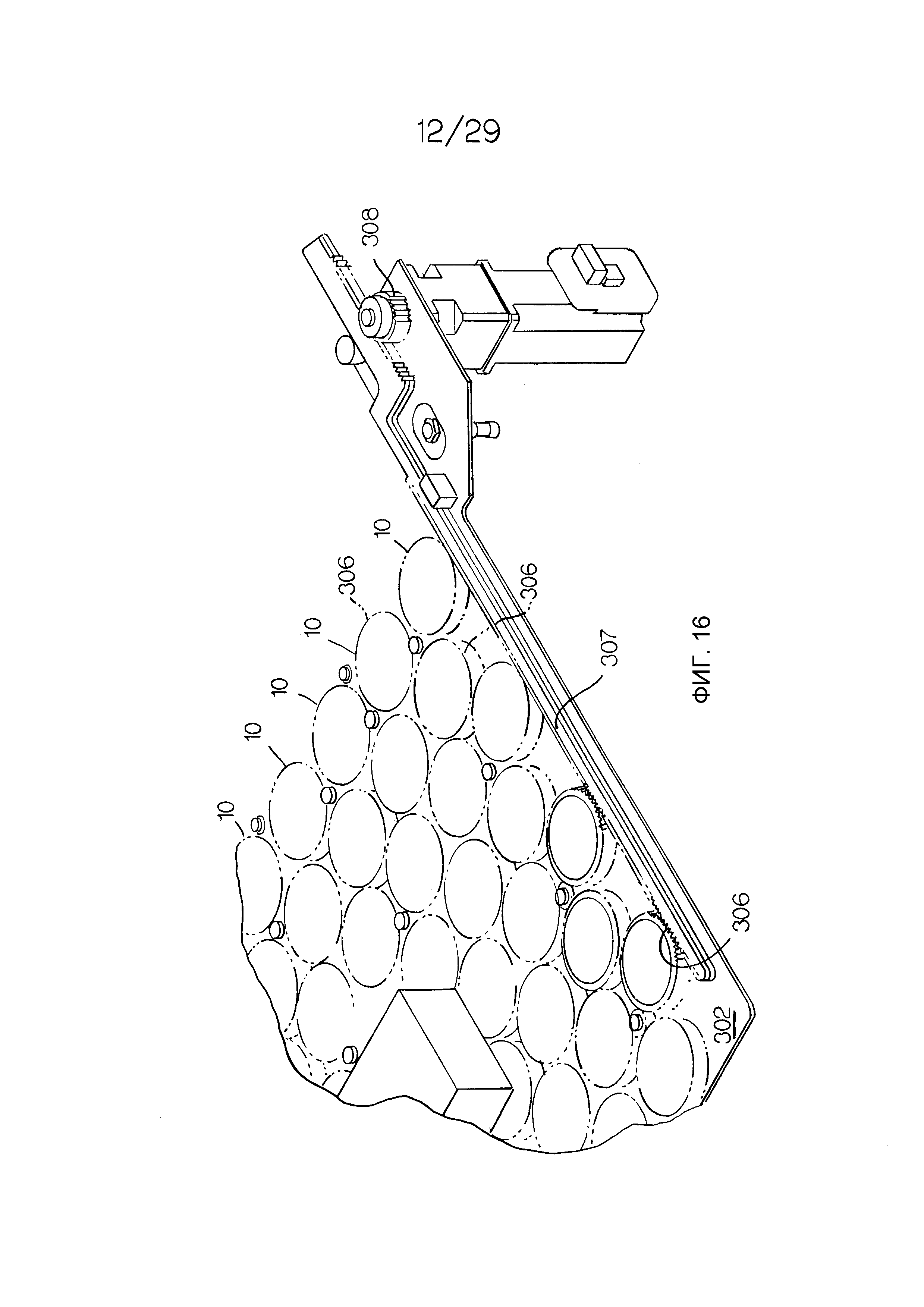
Фиг. 16 представляет собой подробное изображение роликовой пластины Фиг. 15A с удаленной верхней пластиной, показывающее зубчатую рейку для ориентирования многонаправленных роликовых узлов;
Фиг. 17A представляет собой перспективное изображение транспортерной системы, использующей множество роликовых пластин, вмещающих множество многонаправленных роликовых узлов;
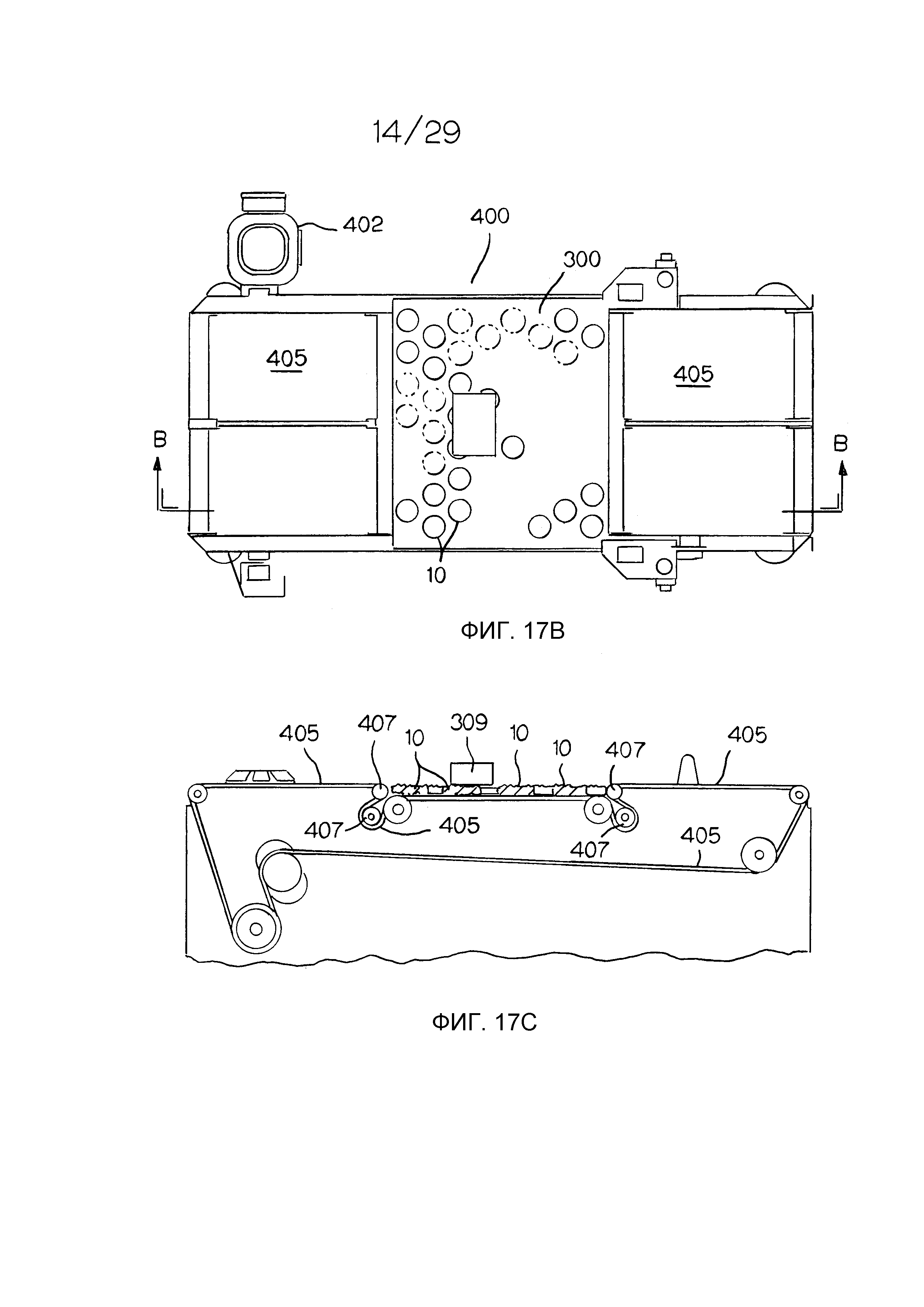
Фиг. 17B представляет собой вид сверху транспортерной системы Фиг. 17A;
Фиг. 17C представляет собой вид в частичном разрезе транспортерной системы Фиг. 17B по линиям B-B;
Фиг. 18 представляет собой схематичное изображение транспортерной системы, содержащей вставленную роликовую пластину, содержащую множество многонаправленных роликовых узлов;
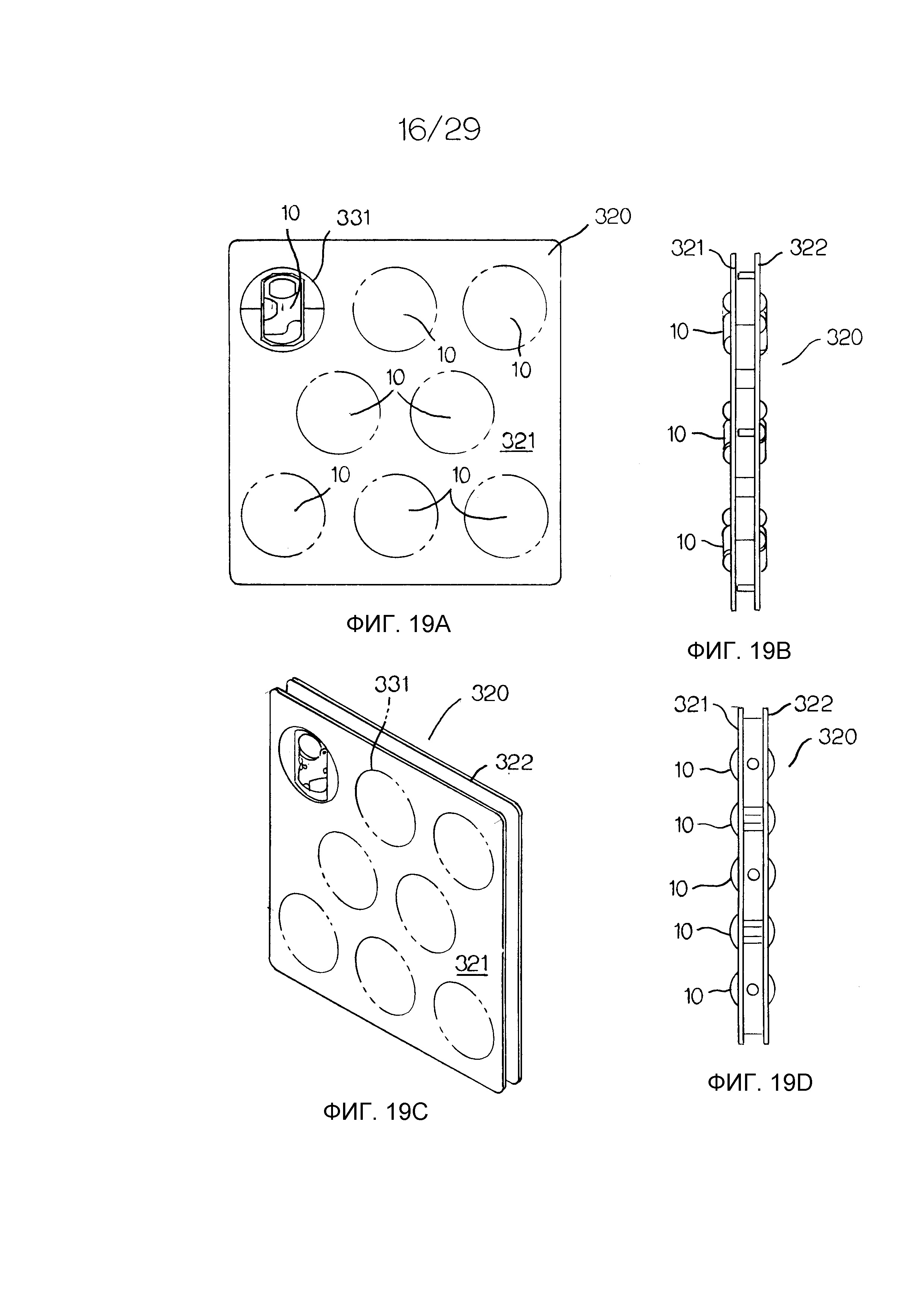
Фиг. 19A представляет собой вид сверху роликовой пластины, вмещающей множество многонаправленных роликовых узлов согласно еще одному варианту осуществления изобретения;
Фиг. 19B представляет собой вид сбоку роликовой пластины Фиг. 19A;
Фиг. 19C представляет собой перспективное изображение роликовой пластины Фиг. 19A;
Фиг. 19D представляет собой вид спереди роликовой пластины Фиг. 19A;
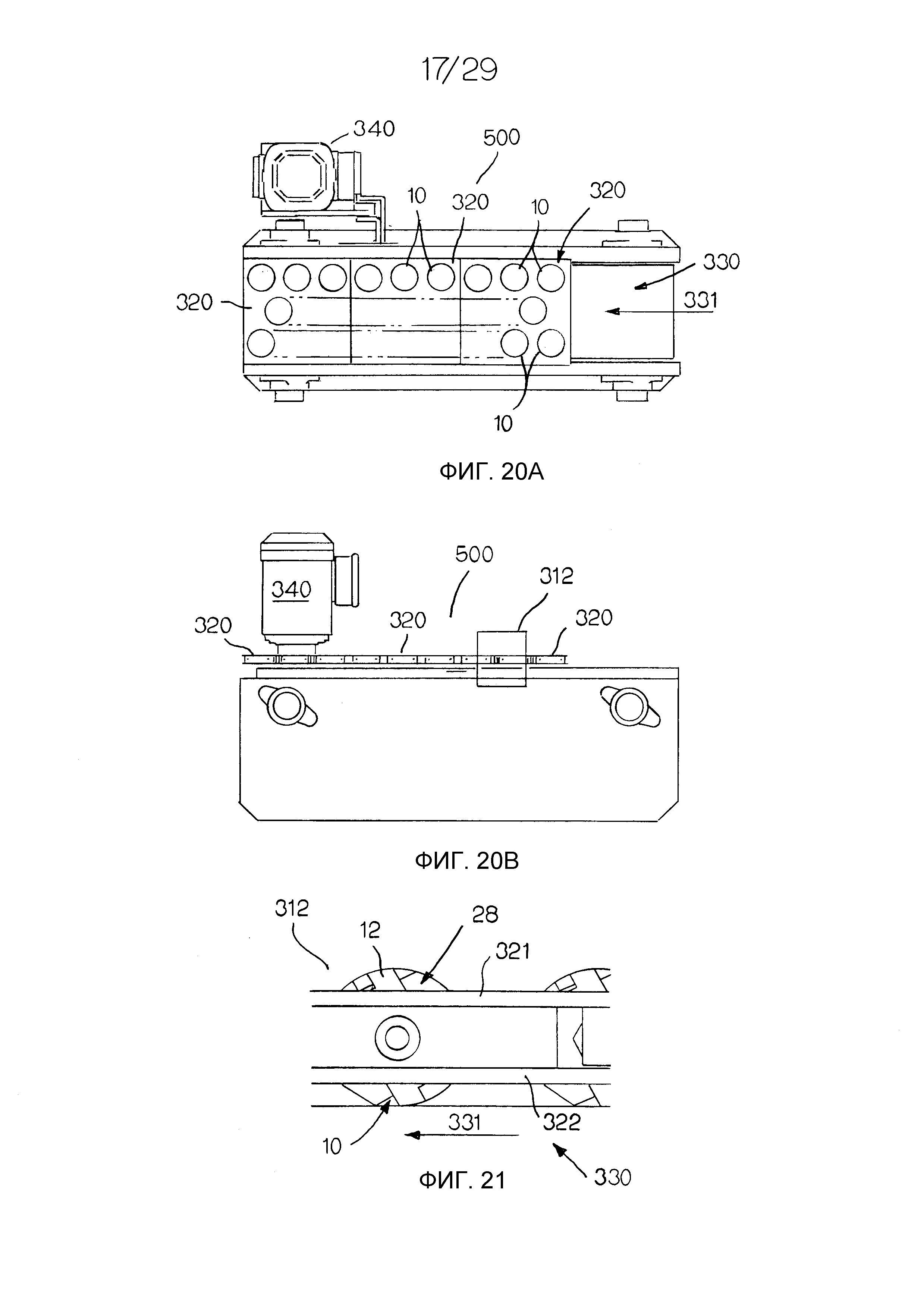
Фиг. 20A представляет собой вид сверху транспортерной системы, использующей роликовую пластину Фиг. 19A;
Фиг. 20B представляет собой вид сбоку транспортерной системы Фиг. 20A;
Фиг. 21 представляет собой подробное изображение секции 312 Фиг. 20B;
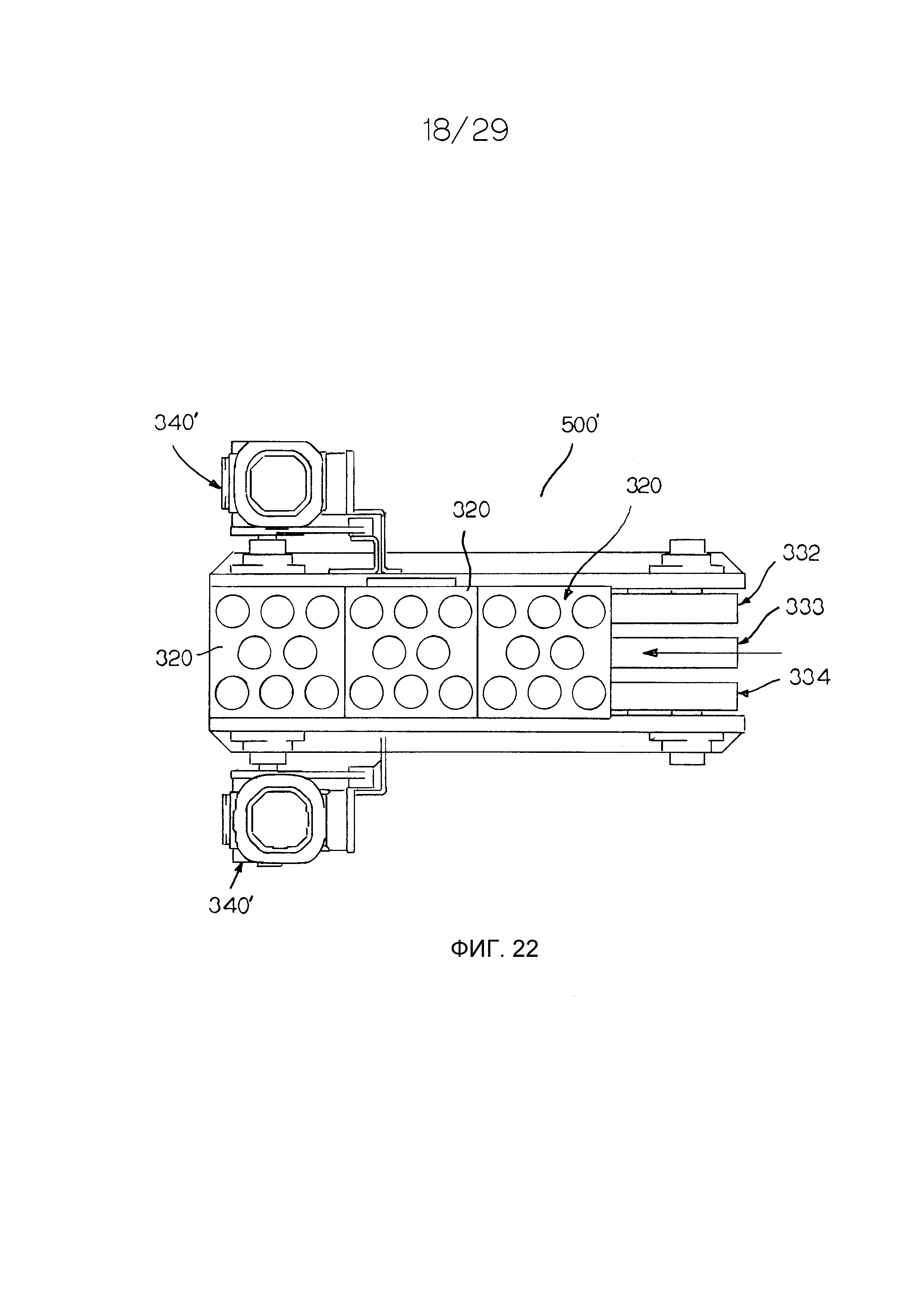
Фиг. 22 представляет собой вид сверху альтернативного варианта осуществления транспортерной системы, имеющей множество приводных транспортерных лент и использующей множество роликовых пластин, вмещающих множество многонаправленных роликовых узлов;
Фиг. 23A и 23B представляют собой изображения в перспективе и сверху роликовой пластины, в которой использованы шестерни для ориентации множества многонаправленных роликовых узлов, помещенных в ней;
Фиг. 24 представляет собой подробное изображение области 615 Фиг. 23A, показывающее зацепление между зубчатой рейкой и роликовым узлом, помещенным в роликовой пластине Фиг. 23A и 23B;
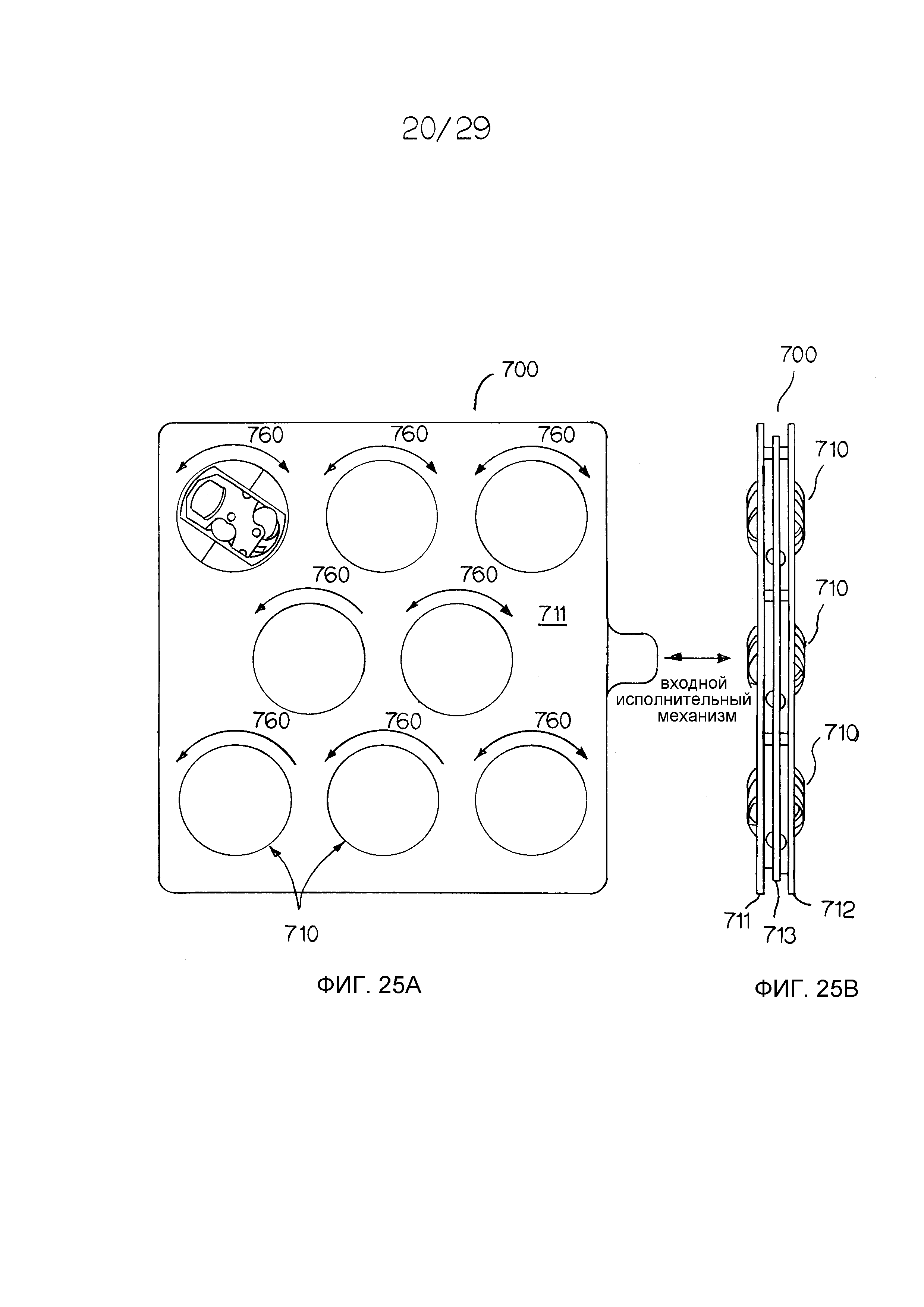
Фиг. 25A и 25B представляют собой изображения сверху и сбоку роликовой пластины, в которой использовано кулачковое кольцо для ориентации множества многонаправленных роликовых узлов, помещенных в ней;
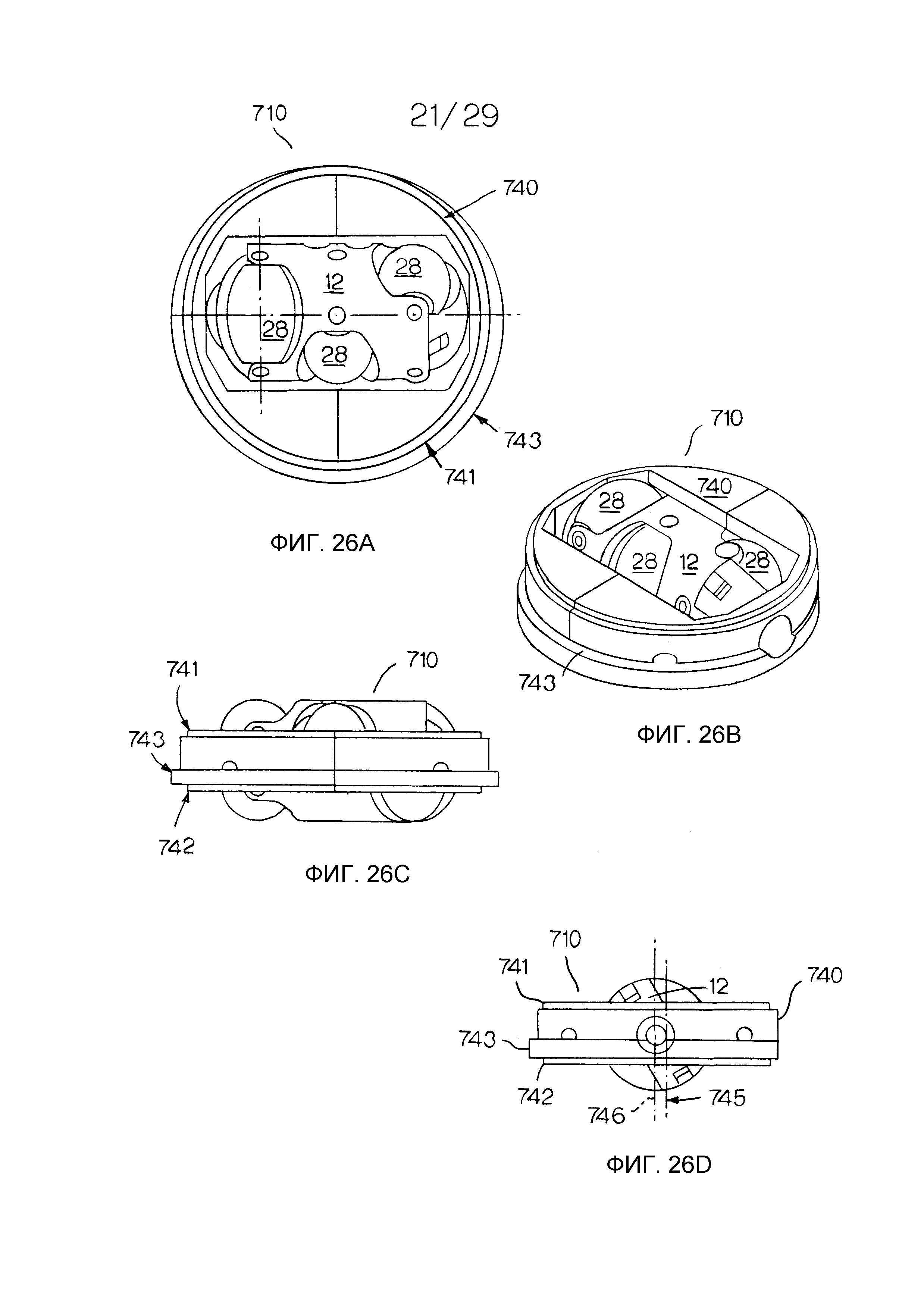
Фиг. 26A-26D иллюстрируют многонаправленный роликовый узел, содержащий смещенное кулачковое кольцо, подходящее для использования в роликовой пластине Фиг. 25A и 25B;
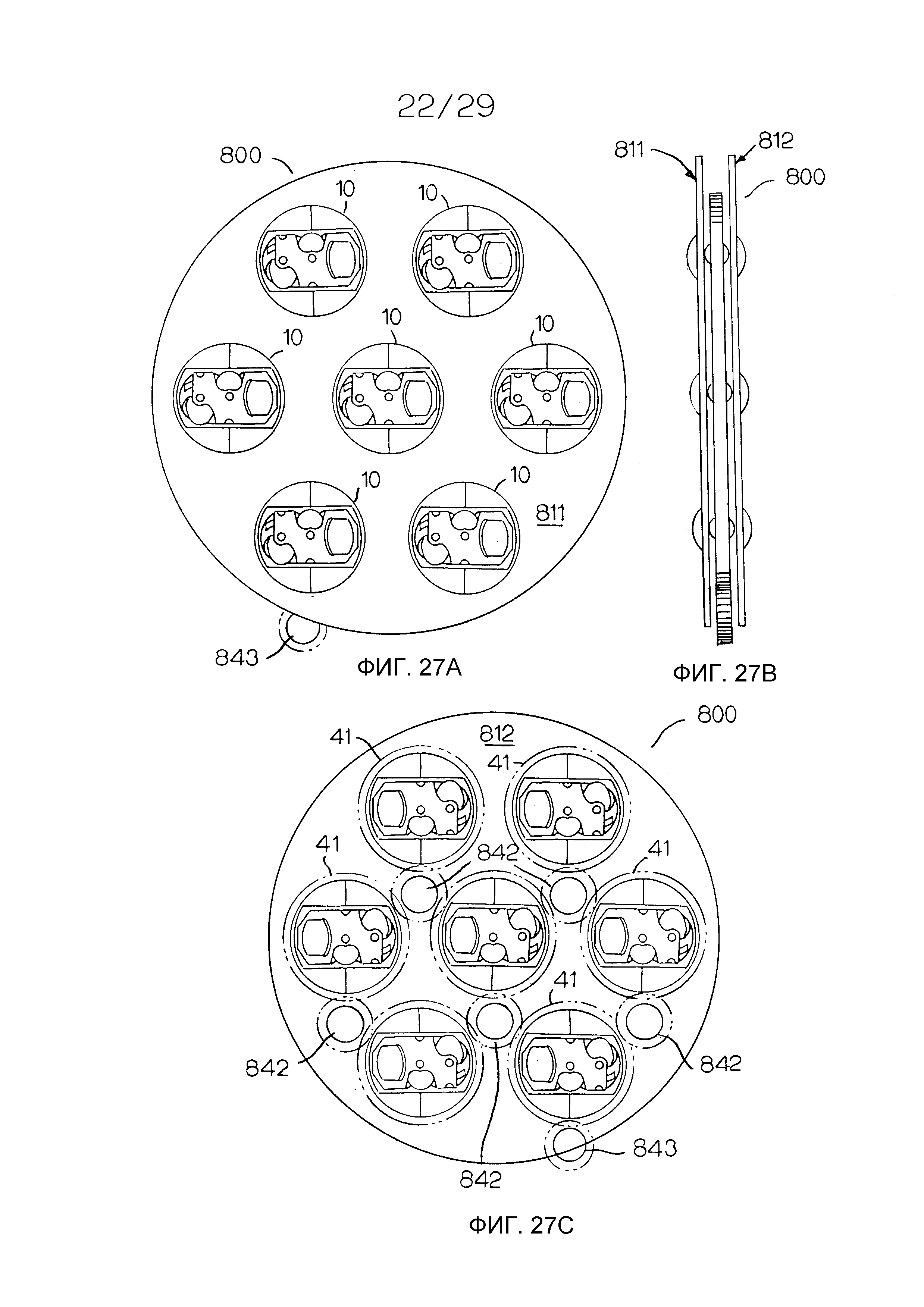
Фиг. 27A-27C представляют собой изображения сверху, сбоку и снизу роликовой пластины с использованием цилиндрических прямозубых шестерен для ориентации множества многонаправленных роликовых узлов, помещенных в ней;
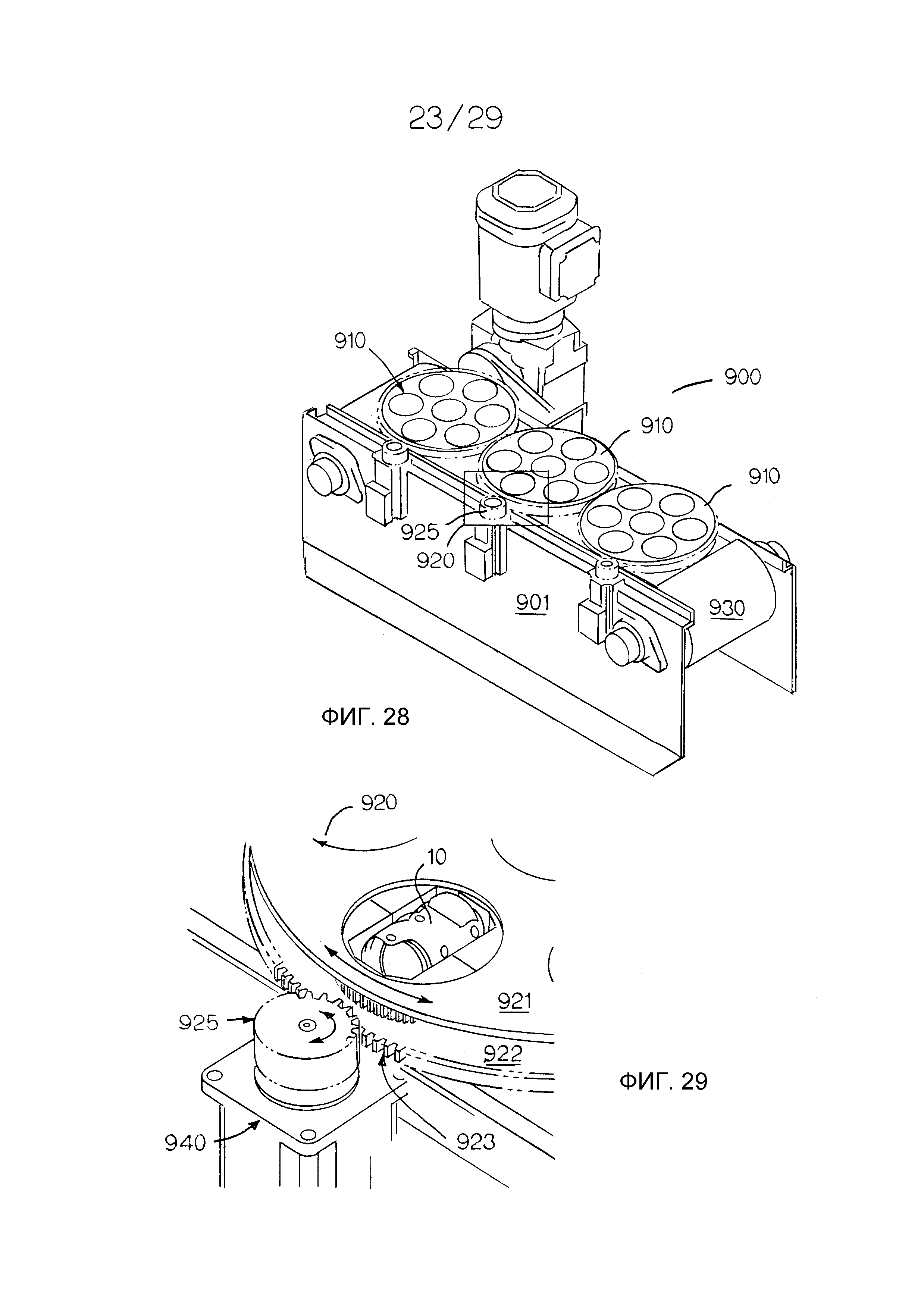
Фиг. 28 иллюстрирует транспортерную систему с использованием роликовых пластин, вмещающих множество многонаправленных роликовых узлов;
Фиг. 29 представляет собой подробное изображение области 920 транспортерной системы Фиг. 28;
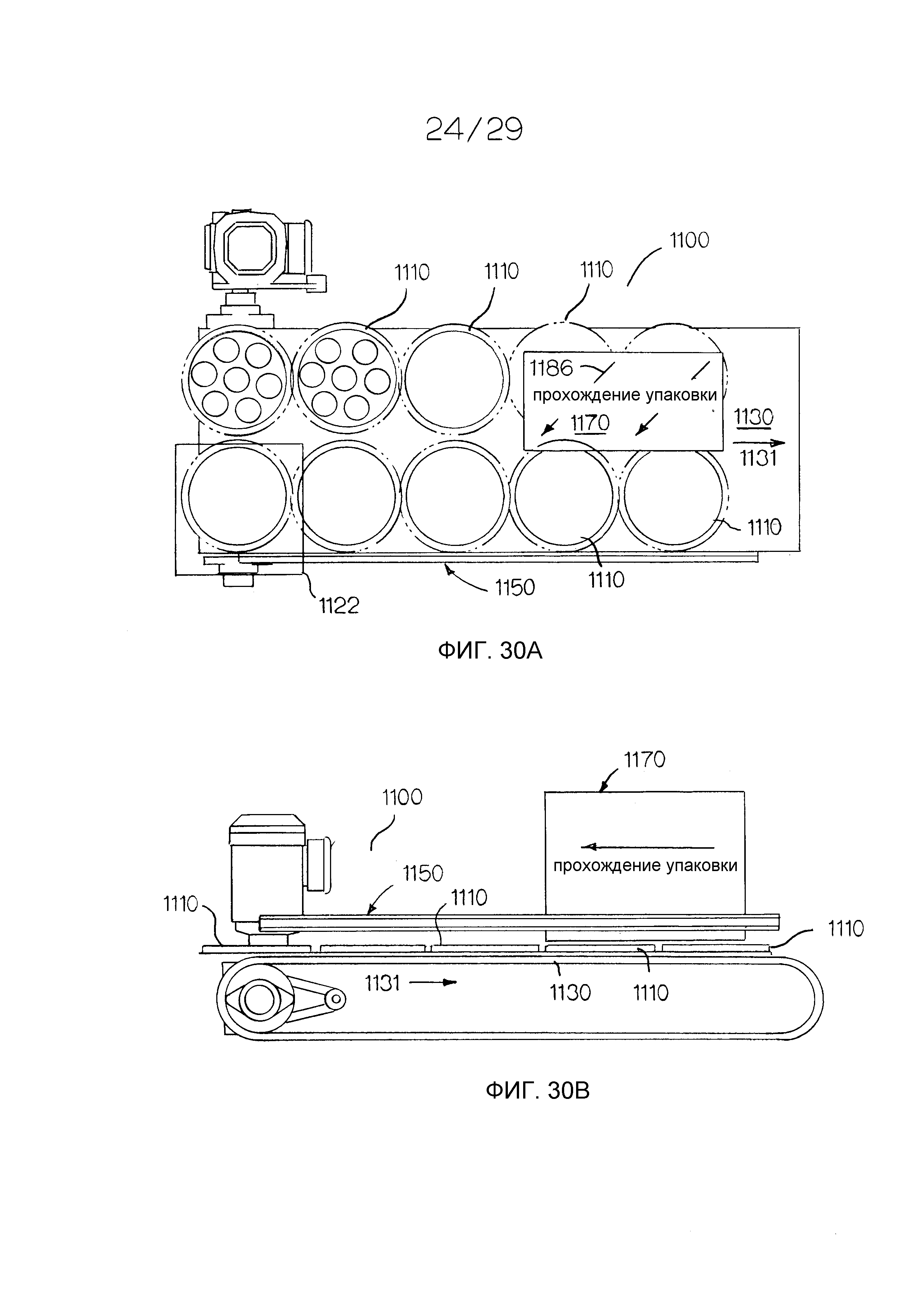
Фиг. 30A и 30B представляют собой изображения сверху и сбоку транспортерной системы с использованием роликовых пластин, вмещающих множество многонаправленных роликовых узлов для выравнивания транспортируемых изделий;
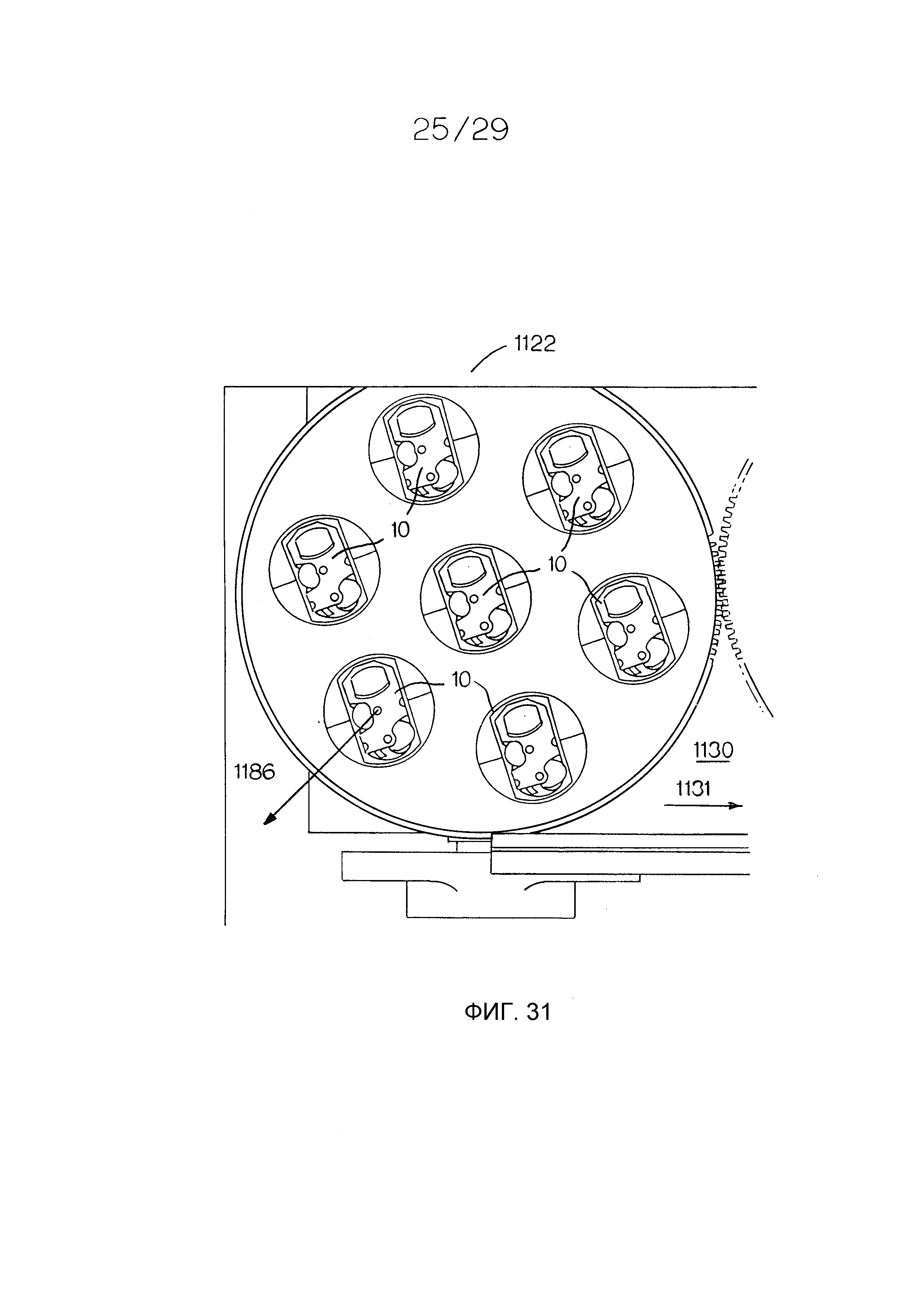
Фиг. 31 представляет собой подробное изображение области 1122 транспортерной системы Фиг. 30A;
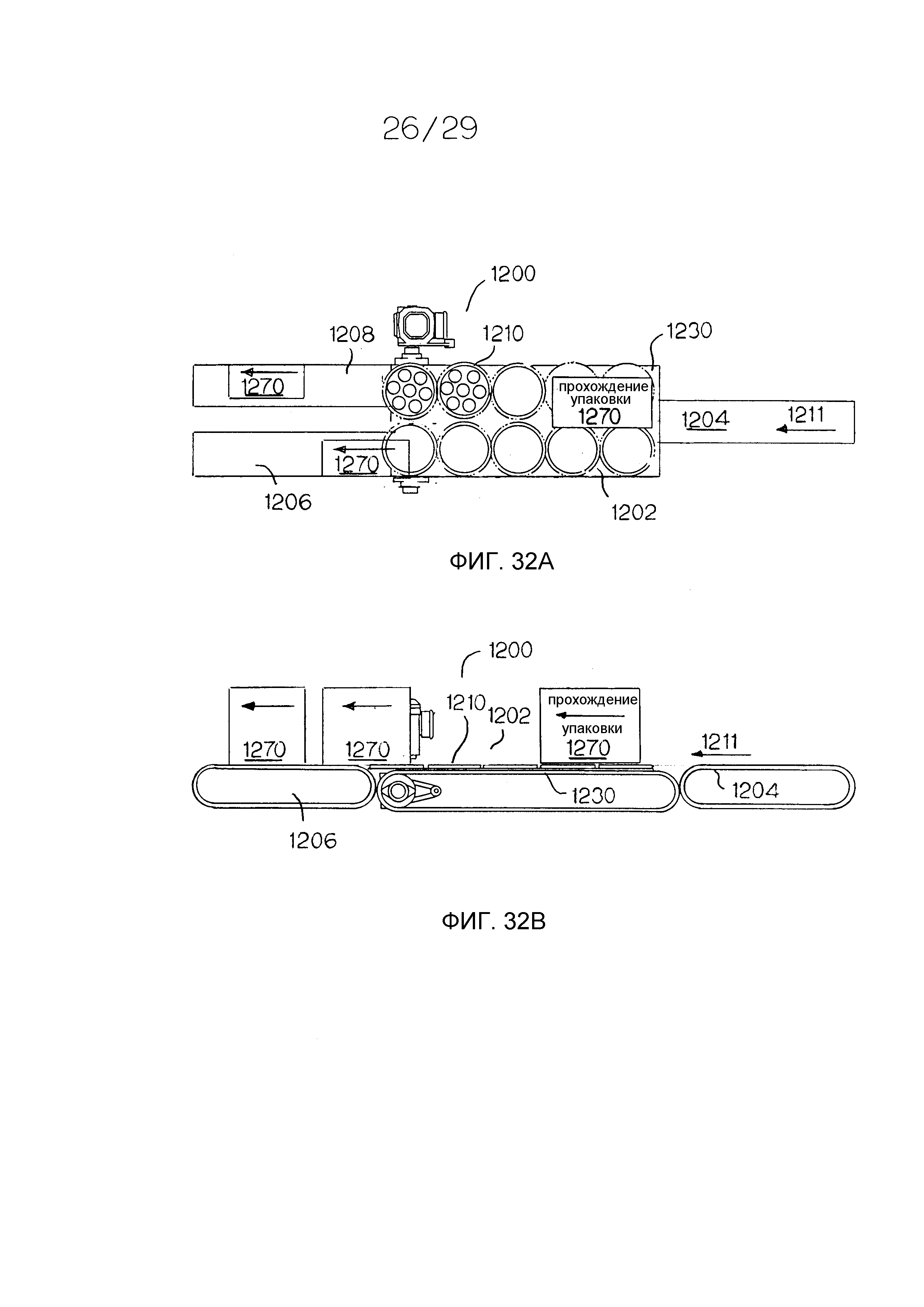
Фиг. 32A и 32B представляют собой изображения сверху и сбоку транспортерной системы с использованием роликовых пластин, вмещающих множество многонаправленных роликовых узлов для отведения транспортируемых изделий на один из двух разгрузочных транспортеров;
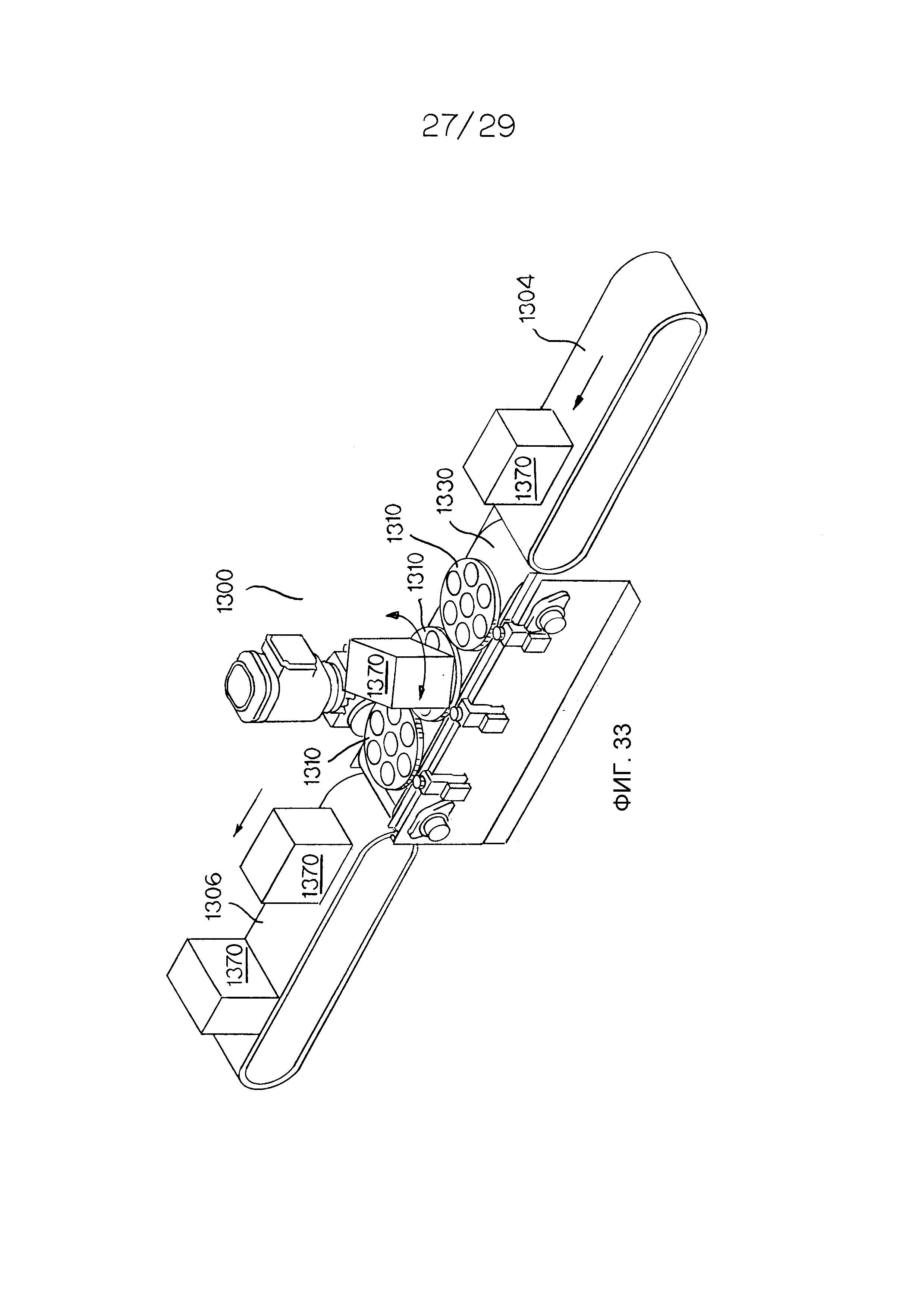
Фиг. 33 иллюстрирует транспортерную систему с использованием роликовых пластин, вмещающих множество многонаправленных роликовых узлов для поворота транспортируемого изделия;
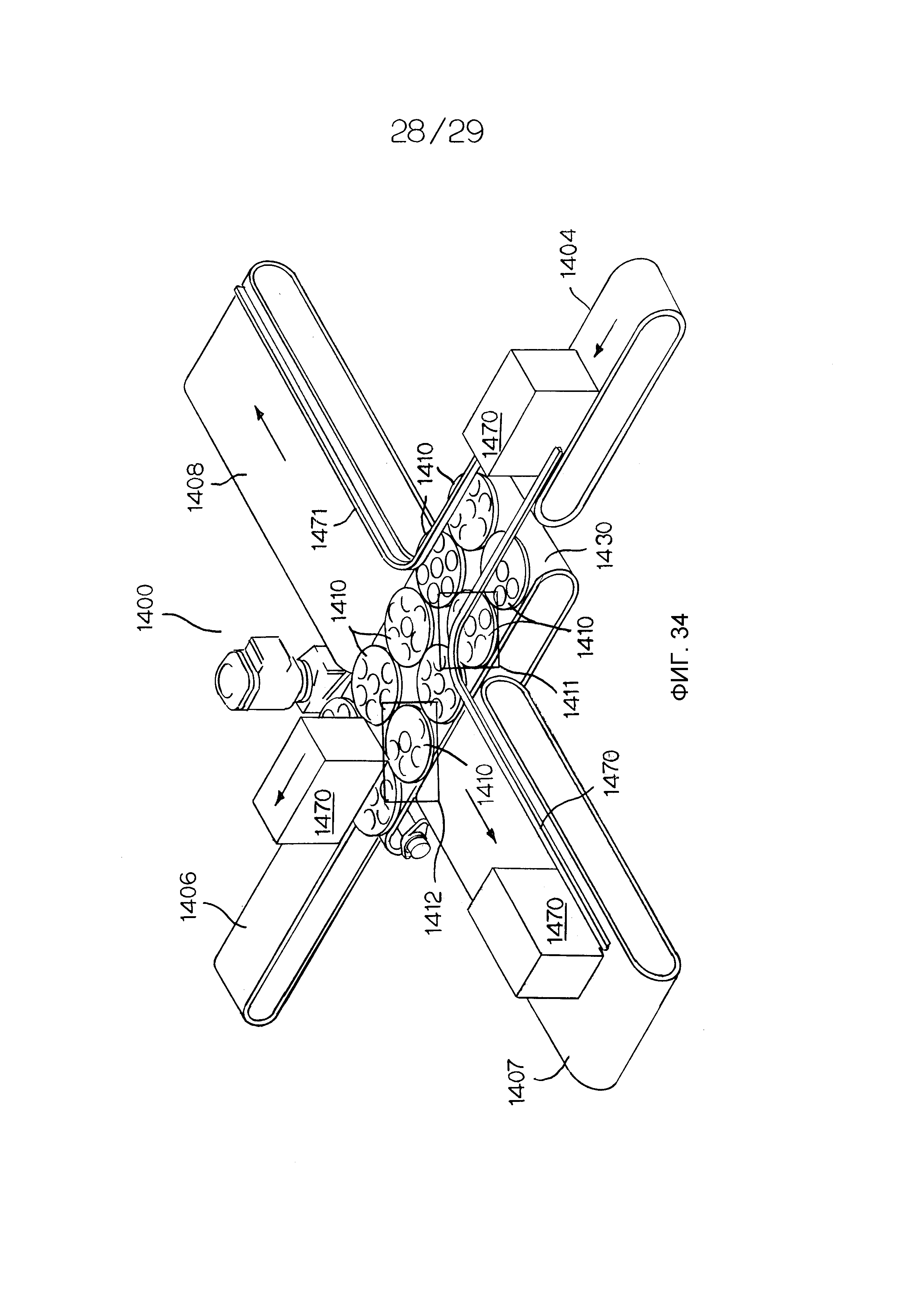
Фиг. 34 иллюстрирует транспортировочную систему с использованием множества многонаправленных роликовых узлов для изменения направления транспортировки, сохраняя в то же время передний край транспортируемого изделия;
Фиг. 35 представляет собой подробное изображение области 1411 транспортерной системы Фиг. 34; а
Фиг. 36 представляет собой подробное изображение области 1412 транспортерной системы Фиг. 34.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Транспортерная система содержит множество многонаправленных роликовых узлов. Каждый многонаправленный роликовый узел содержит выполненную с возможностью поворота раму и ролики для поддержки транспортируемых изделий и для управления траекторией изделий через транспортерную систему. В дополнение к множеству многонаправленных роликовых узлов, транспортерная система может содержать исполнительный механизм, который может регулировать ориентацию многонаправленных роликовых узлов по отдельности, а также регулировать множество многонаправленных роликовых узлов в виде группы. Изобретение будет описано ниже в отношении некоторых иллюстративных вариантов осуществления.
На Фиг. 1A-1C показан вариант осуществления многонаправленного роликового узла, подходящего для использования в транспортерной системе. Многонаправленный роликовый узел 10 содержит раму 12, выполненную с возможностью поворота вокруг главной оси 14. Рама 12 содержит утолщения 18 оси, продолжающиеся вдоль главной оси 14. Утолщения 18 оси образованы в торцевой крышке 19. Рама дополнительно содержит отверстия 16 для приема роликов 28. На раме 12 в отверстиях 16 установлен по меньшей мере один набор взаимно приводящих в движение роликов. Иллюстративный вариант осуществления показывает три набора 22, 24, 26 взаимно приводящих в движение роликов, расположенных по длине рамы 12 с различными ориентациями, при этом каждый набор содержит пару параллельных роликов 28 по существу с эллиптической формой. Иллюстративная рама 12 содержит отверстия 31 для осей роликов для приема осей 32 роликов, проходящих через ролики вдоль второстепенной оси 34. Каждый ролик 28 выполнен с возможностью вращения вокруг второстепенной оси 34, образованной осями 32. Каждая второстепенная ось 34 ориентирована поперек главной оси вращения 14. (Как использовано в данном описании, поперечными осями являются оси, которые не являются параллельными друг другу, что включает скрещивающиеся оси, которые лежат в различных плоскостях). Как показано на Фиг. 1B, наружные поверхности 29 роликов 28 продолжаются за пределы рамы 12 узла. В одном варианте осуществления, каждый ролик 28 представляет собой эллипсоид с плоскими концами с осями, проходящими через центральный проход, но ролики могут иметь любую подходящую форму и конфигурацию. В еще одном варианте осуществления, ролики 28 содержат утолщения оси для установки с возможностью вращения в раме 12. Может быть использовано другое подходящее средство для установки роликов на раму с возможностью вращения.
Ролики 28 в каждом наборе могут взаимно приводить друг друга в движение с помощью любого подходящего средства. Например, как показано на Фиг. 2, контакт роликов между наружными поверхностями 29 взаимодействующих роликов 28 вызывает передачу вращающего усилия от одного ролика к другому. Таким образом, когда один ролик приходит в движение в первом направлении, обозначенном стрелкой 36 на Фиг. 1C, взаимодействующий ролик крутится в противоположном направлении, обозначенном стрелкой 37 на Фиг. 1C и 2. В качестве альтернативы, ролики могут взаимно приводиться в движение через шестерни, магнитное приведение в действие или другое подходящее средство. Например, поверхность каждого ролика может содержать зубья, при этом зубья входят в зацепление друг с другом, обеспечивая взаимное приведение в движение. Для уменьшения проскальзывания между роликами, материал, образующий внешние поверхности роликов 28, может состоять из упругого или по меньшей мере гибкого материала. В еще одном варианте осуществления, возможность взаимного приведения роликов в движение могут обеспечивать внешние шестерни, соединенные с роликами.
Как показано на Фиг. 3A-4, многонаправленный роликовый узел 10 может дополнительно содержать корпус 40 ролика для установки рамы 12 и роликов 28 с возможностью вращения. Предпочтительно, чтобы рама 12 свободно вертелась вокруг главной оси 14 внутри корпуса 40. Иллюстративный корпус 40 представляет собой круглый, дискообразный корпус с центральным отверстием 42 для приема рамы 12. Как показано на Фиг. 4, иллюстративный роликовый узел содержит подшипники 45 и осевые вставки 44, которые можно вставлять в прорези 47 в корпусе. Подшипники 45 и осевые вставки 45 принимают утолщения 18 оси рамы 12 для установки рамы 12 с возможностью вращения в корпус 40. Выступающие участки рамы 12 и роликов 28 выступают за пределы верхней и нижней поверхностей 48, 49 корпуса 40.
Каждый набор роликов 28 ориентирован с иным углом относительно рамы 12. Предпочтительно, наборы роликов 28 равномерно разнесены по периферии рамы, при этом сумма углов между сериями последовательных второстепенных осей 34 вращения равна 90°. В варианте, показанном на Фиг. 1A-4, рама 12 вмещает три набора пар роликов, смещенных на 45° друг относительно друга. Таким образом, по меньшей мере один набор роликов все время продолжается за пределы верхней и нижней поверхностей 48, 49 корпуса, независимо от ориентации рамы 12 при вращении.
В варианте осуществления, показанном на Фиг. 3A-4, корпус 40 дополнительно содержит зубья 41 по периметру или части периметра. Зубья 41 зацепляют шестерни или другое устройство для ориентации роликового узла, как описано ниже.
Фиг. 5 показывает еще один вариант осуществления многонаправленного роликового узла 110. Роликовый узел 110 содержит дискообразный корпус 140, имеющий отверстие 142 для приема способной поворачиваться рамы 112, вмещающей взаимно приводящие в движение ролики 128. Рама 112 содержит утолщения 118 оси, установленные в отверстие 144 в корпусе 140. Рама 112 поворачивается вокруг оси 114 внутри корпуса 140. Рама 112 является более цилиндрической, чем рама 12 Фиг. 1-4, но принципы работы являются по существу теми же самыми.
На Фиг. 6A-7 показан еще один вариант осуществления многонаправленного роликового узла 210. Многонаправленный роликовый узел 210 содержит выполненную с возможностью поворота раму 212 для установки одного или более наборов взаимно приводящих в движение роликов 228. Рама 212 содержит множество дискообразных ребер 215 и способна поворачиваться вокруг главной оси 214. Каждый набор взаимно приводящих в движение роликов 228 установлен в пространстве между ребрами 215. Рама 212 дополнительно содержит утолщения 218 оси, продолжающиеся вдоль главной оси 214 вращения рамы 212. В варианте осуществления Фиг. 6A-7, каждый ролик 228 содержит центральный цилиндрический ролик 227, выполненный с возможностью вращения вокруг второстепенной оси 234, и два боковых конуса 229. Каждый центральный цилиндрический ролик 227 зацеплен за счет контакта с соответствующим роликом в наборе таким образом, что вращение одного ролика в наборе вызывает вращение соответствующего ролика в наборе, предпочтительно в противоположном направлении. Для взаимного приведения роликов в движение может быть использовано другое подходящее средство, такое как шестерни или магниты.
Многонаправленный роликовый узел 210 дополнительно содержит корпус 240 для установки рамы 212 и роликов 228 с возможностью вращения. Как показано на Фиг. 7, корпус 240 может содержать две сопряженные половины 240a и 240b. Иллюстративный корпус 240 дискообразный, с центральным отверстием 242 для приема с возможностью вращения рамы 212 и осевыми отверстиями 244 для приема утолщений 218 оси. Подшипники 243 и шайбы 245 облегчают вращение рамы 212 при установке в корпусе 240. Корпус 240 Фиг. 6A-7 образован с контурной верхней поверхностью 248 и контурной нижней поверхностью (не показана).
Как показано на Фиг. 8A-9, многонаправленный роликовый узел 310 может содержать два набора взаимно приводящих в движение роликов 328, каждый из которых ориентирован под 90° друг относительно друга на периферии рамы 312, установленной в корпусе 340. Рама 312 содержит утолщения 318 оси, образованные в торцевой крышке 319 и продолжающиеся вдоль главной оси 314. Каждый набор роликов 328 в варианте осуществления Фиг. 8A-9 содержит пару параллельных, способных поворачиваться роликов, имеющих внешние поверхности, которые контактируют друг с другом, чтобы индуцировать вращение в одном ролике вокруг поперечной второстепенной оси при вращении другого ролика, хотя может быть использовано другое средство обеспечения вращения в соответствующем ролике.
Многонаправленный роликовый узел может содержать любое подходящее количество наборов взаимно приводящих в движение роликов, расположенных по длине рамы с различными ориентациями. Каждый набор может содержать любое подходящее количество роликов и не ограничен парой взаимно приводящих в движение роликов в каждом наборе.
Многонаправленный роликовый узел может быть использован для управления ориентацией и траекторией транспортируемого изделия, помещенного на многонаправленный роликовый узел. Многонаправленный роликовый узел может перенаправлять единственный входной вектор в неограниченный угловой выходной вектор, допускающий направление изделия, помещенного на многонаправленный роликовый узел, в любом подходящем направлении. Например, со ссылкой на Фиг. 10A-10B, входное усилие, прикладываемое к нижней стороне многонаправленного роликового узла 110, обозначенное стрелкой 61, которая перпендикулярна главной оси 114, заставляет раму 112 поворачиваться внутри корпуса 140 вокруг главной оси 114 в направлении выходного вектора 62 рамы. Ролики 28 не вращаются вокруг второстепенных осей 34 под влиянием входного усилия 61. Соответственно, выходной вектор 62 узла составляет 180° от входного вектора 61. Когда роликовый узел 210 расположен с главной осью 214, проходящей под 90° относительно входного вектора 61, роликовый узел будет толкать изделие, помещенное сверху рамы 212, в направлении, указанным выходным вектором 62, или 180° относительно входного вектора 61.
Со ссылкой на Фиг. 11A-11B, входное усилие, прикладываемое к нижней стороне узла 110, то есть параллельно главной оси 114 (т.е. с ориентацией 0°) и перпендикулярно по меньшей мере одной из второстепенных осей 134, будет создавать иной выходной вектор. Входное усилие, обозначенное вектором 63, будет вызывать вращение одного набора роликов 128, без приведения в движение рамы 112. В варианте осуществления, показанном на Фиг. 11А и 11B, первый набор 122 роликов 128 приводится в действие вследствие ориентации рамы 112. Как показано, входной вектор приводит в движение первый ролик 128a из первого набора 122 в первом направлении 136, вызывая поворот второго ролика 128b во втором направлении 137. Вращение второго ролика 128b создает выходной вектор 64, который расположен параллельно входному вектору 63, который продвигает изделие, помещенное на раме 112 в направлении выходного вектора 64. Набор роликов 128 приводится в действие в зависимости от ориентации рамы 112, когда прикладывают входное усилие. Если рама 112 ориентирована таким образом, что средний набор роликов расположен по существу с вертикальной ориентацией, с нижним роликом в контакте с входным усилием, то средний набор будет приводиться в движение с созданием выходного вектора 64. Если рама ориентирована с третьим набором роликов, вращающихся по существу с вертикальной ориентацией, третий приводиться в движение с созданием выходного вектора 64. Два или более наборов роликов 128 могут приводиться в движение одновременно с созданием выходного вектора 64.
Со ссылкой на Фиг. 12A-12B, входное усилие, которое является наклонным как к главной оси 114, так и к второстепенным осям 134 вызывает вращение как роликов 128, так и рамы 112 ролика с созданием выходного вектора, который является комбинацией выходных векторов рамы 112 и роликов 128. В варианте осуществления Фиг. 12A и 12B, входной вектор 71, являющийся показателем входного усилия, ориентирован на 45° относительно главной оси 114. Усилие вдоль входного вектора 71 вызывает вращение рамы 112 вокруг главной оси 114 с созданием выходного вектора рамы 72, который является перпендикулярным оси 114. Входной вектор 71 также вызывает вращение одного или более наборов роликов 128 с созданием выходного вектора ролика 74, который является перпендикулярным второстепенной оси 34. Комбинированный выходной вектор 76 проходит под 90° относительно входного вектора 71, так что объект, помещенный на узел 110, будет направляться от узла под углом 90° относительно входного усилия 71.
Требуемый выходной угол объекта, расположенного на многонаправленном роликовом узле, может достигаться через ориентирование многонаправленного роликового узла с конкретным углом относительно входного усилия. Иллюстративный узел создает соотношение 1:2 между угловым входным вектором и угловым выходным вектором. Могут быть предусмотрены другие соотношения. Когда входной вектор изменяется на 90°, получаемый в результате выходной вектор будет изменяться на 180°.
Например, как показано на Фиг. 13, когда многонаправленный роликовый узел 110 ориентирован под углом 30° относительно входного вектора 81, выходной вектор 83, который является комбинацией выходного вектора 85 рамы и выходного вектора 86 ролика, будет проходить при 60° (удвоенный входной угол) относительно входного вектора 81. Фиг. 14 иллюстрирует взаимоотношение между входным вектором 81, выходным вектором 85 рамы, выходным вектором 86 ролика и общим выходным вектором 83 для всего узла. Входной вектор 81, проходящий при 30° относительно главной оси 114, будет создавать выходной вектор 85 рамы, который является перпендикулярным оси 114, а по величине равен половине входного вектора (sin 30°). Входной вектор 81 также создает выходной вектор 86 ролика, который проходит параллельно главной оси 114, а по величине равен 0,866 входного вектора 81 (cos 30°). При складывании вместе, выходной вектор 85 рамы и выходной вектор 86 ролика создают выходной вектор 83 узла, проходящий при 60° относительно входного вектора 81, а по величине равный входному вектору 81. Вследствие этого, объект, помещенный на узел 110, который ориентирован под углом 30° относительно входного вектора 81, будет отклоняться от узла под углом, равным 60°, от входного усилия, воздействующего на узел.
В одном варианте применения, для образования отклоняющей роликовой пластины для транспортируемых изделий в роликовой пластине может быть установлено множество многонаправленных роликовых узлов. Например, как показано на Фиг. 15A-15C, роликовая пластина 300, способная отклонять объекты, может содержать множество многонаправленных роликовых узлов 10, установленных между верхней пластиной 301 и нижней пластиной 302. Ролики 28 и рамы 12 роликовых узлов выступают через отверстия в верхней пластине 301 и нижней пластине 302. Множество роликовых узлов могут иметь любой подходящий размер, форму, количество роликовых узлов или конфигурацию. Фиг. 16 показывает роликовую пластину 300 с удаленной верхней пластиной 301. Как показано, роликовая пластина 300 содержит небольшие цилиндрические прямозубые шестерни 306 между многонаправленными роликовыми узлами 10. Цилиндрические прямозубые шестерни 306 зацепляют зубья 41 по периметру роликовых узлов, соединяя узлы вместе. Зубчатая рейка 307 или другое подходящее средство приведения в движение проходит вдоль боковой стороны роликовой пластины 300, зацепляя крайние роликовые узлы. Ведущая шестерня 308 зацепляет зубчатую рейку 307. Исполнительный механизм вращает ведущую шестерню 308, передавая движение на зубчатую рейку 307, что вызывает вращение узлов в виде группы и допуская регулируемую ориентацию многонаправленных роликовых узлов 10 относительно верхней пластины 301 и нижней пластины 302. Соответственно, 20 все множество роликовых узлов может быть ориентировано с выбранным углом для регулирования траектории изделия 309, помещенного на роликовую пластину 300.
Может быть использовано любое подходящее средство для ориентирования многонаправленного роликового узла с выбранной ориентацией относительно входного усилия для регулирования выходной траектории. Например, для ориентирования многонаправленного роликового узла могут быть использованы магниты, двигатели или другие типы шестерней.
Как показано на Фиг. 17A-17C, роликовая пластина 300, вмещающая множество многонаправленных роликовых узлов, может быть реализована в транспортировочной системе 400 для транспортировки продуктов и может иметь ряд полезных вариантов применения в транспортировочной системе. Транспортировочная система 400 содержит раму 401 и одну или более транспортерных лент 405, обернутых вокруг роликов 30 и/или звездочек. Транспортерная лента 405 перемещает изделия к роликовой пластине 300 и помещает изделия на роликовую пластину 300. Транспортерная лента 405 отклоняется под роликовую пластину 300 роликами 407. Под роликовой пластиной 300, транспортерная лента 405 образует приводное устройство для приложения входного усилия вдоль выбранного направления с целью приведения в движение многонаправленных роликовых узлов 10, как схематично показано на Фиг. 18. В качестве альтернативы, ролики 28, раму 12 или и то и другое можно активно приводить в движение посредством двигателя, магнитов, шестерней или другого подходящего средства.
Исполнительный механизм 402 регулирует ориентацию роликовых узлов в роликовой пластине 300. Ориентация роликовых узлов относительно транспортерной ленты 405 определяет выходную траекторию изделия 309, помещенного сверху роликовой пластины.
Транспортерная лента 405 отклоняется снова вверх в конце роликовой пластины 300 для приема и перемещения изделий от роликовой пластины 300.
Транспортерной лентой 405 может быть плоская лента, лента с интегрированными роликами, лента с интегрированными шариками или транспортерная лента любого другого подходящего типа.
Ленту 405 можно избирательно зацеплять и расцеплять с многонаправленными роликовыми узлами на нижней стороне роликовой пластины с помощью любого подходящего средства приведения в движение.
Применение изобретения не ограничено транспортерной лентой в качестве приводного устройства для многонаправленного роликового узла, и могут использоваться другие подходящие приводные устройства.
Фиг. 19A-19D показывают еще один вариант осуществления роликовой пластины 320, вмещающей множество многонаправленных роликовых узлов, согласно еще одному варианту осуществления изобретения. Роликовая пластина 320 содержит верхнюю пластину 321, имеющую отверстия 331 для роликовых узлов, и нижнюю пластину 322, имеющую отверстия для роликовых узлов, так что выступающие участки каждого роликового узла выступают над верхней пластиной 321 и под нижней пластиной 322. В варианте осуществления, показанном на Фиг. 19A-19D, роликовая пластина 320 содержит восемь роликовых узлов, каждый из которых ориентирован аналогично, но изобретение не ограничено иллюстративной конфигурацией.
Со ссылкой на Фиг. 20A, 20B и 21, еще один вариант осуществления транспортировочной системы 500 использует множество роликовых пластин 320, вмещающих многонаправленные роликовые узлы 10. Транспортировочная система 500 содержит множество многонаправленных роликовых узлов для направления продуктов в выбранном направлении. Множество может включать множество роликовых пластин 320, при этом каждая роликовая пластина 320 вмещает множество многонаправленных роликовых узлов. Транспортировочная система 300 дополнительно содержит приводное устройство, проиллюстрированное в виде транспортерной ленты 330, движущейся в направлении стрелки 331, для приложения входного усилия вдоль выбранного направления с целью приведения в движение многонаправленных роликовых узлов 10. В качестве альтернативы, ролики 28, раму или и то и другое можно активно приводить в движение посредством двигателя или другого подходящего средства.
Исполнительный механизм 340 регулирует ориентацию многонаправленных роликовых узлов относительно транспортерной ленты 330. Исполнительный механизм 340 может вращать всю роликовую пластину 320 и изменять ориентации каждого множества многонаправленных роликовых узлов для изменения ориентации транспортировки. В качестве альтернативы, исполнительный механизм может регулировать единственный многонаправленный роликовый узел. Как описано ранее, изменение ориентации многонаправленного роликового узла изменяет выходной вектор изделия, помещенного на роликовый узел. Исполнительным механизмом 340 может быть исполнительный механизм электрического, пневматического или другого подходящего типа.
Как показано на Фиг. 21, транспортерная лента 330 контактирует с рамой 12 и открытым роликом 28 узла 10 для приведения в движение многонаправленного роликового узла 10, вызывая поворот рамы 12, роликов 28 или и того и другого. Каждый многонаправленный роликовый узел 10 расположен в роликовой пластине между верхней пластиной 321 и нижней пластиной 322. В зависимости от ориентации узла 10, изделие, помещенное на роликовый узел 10, будет направляться в выходном направлении, которое проходит под выходным углом относительно направления 331 транспортерной ленты, который составляет двойной угол, под которым главная ось 14 роликового узла 10 проходит относительно направления 331 транспортерной ленты.
Как показано на Фиг. 22, транспортерная система 500ʹ, содержащая множество многонаправленных роликовых узлов, может содержать множество транспортерных лент 332, 333, 334 для приведения в движение многонаправленных роликовых узлов. В варианте осуществления Фиг. 22, для изменения ориентаций роликовых пластин 320, вмещающих многонаправленные роликовые узлы, относительно транспортерных лент 332, 333, 334 может быть использовано множество исполнительных механизмов 340ʹ.
Транспортерная система может задействовать любое подходящее средство для регулирования угловой ориентации многонаправленных роликовых узлов для регулирования траектории изделий, перемещаемых через систему.
Фиг. 23A и 23B иллюстрирует подход для ориентирования множества многонаправленных роликовых узлов. Как показано на Фиг. 23A и 23B роликовая пластина 600, подходящая для реализации в транспортерной системе, содержит множество многонаправленных роликовых узлов 10, помещенных между верхней пластиной 621 и нижней пластиной 622. Корпус 40 каждого роликового узла содержит ведущую шестерню 640 для зацепления зубчатой рейки 650 на верхней пластине 621. В качестве альтернативы зубчатая рейка 650 может быть расположена на нижней пластине 622 или между верхней пластиной 621 30 и нижней пластиной 622. Входной исполнительный механизм (не показано) избирательно передвигает зубчатую рейку 650, которая заставляет каждый многонаправленный роликовый узел 10 поворачиваться относительно верхней пластины 621 и нижней пластины 622. Фиг. 24 представляет собой подробное изображение участка 615 Фиг. 23A, показывающее зубчатую рейку 650, зацепляющую ведущую шестерню 440 на периферии корпуса 40 узла для регулирования ориентации многонаправленных роликовых узлов.
Согласно еще одному варианту осуществления изобретения, показанному на Фиг. 25A-25B и 26A-26D, для ориентирования множества многонаправленных роликовых узлов может быть использовано воздействие кулачком. Фиг. 25A и 25B иллюстрируют роликовую пластину 700, содержащую множество многонаправленных роликовых узлов 710. Роликовая пластина 700 содержит верхнюю пластину 711, нижнюю пластину 712 и кулачковую пластину 713, добавленную между верхней и нижней пластинами. Как показано на Фиг. 26A-D, корпус 740 ролика для каждого роликового узла 710 может содержать центрирующее кольцо 741 верхней пластины для центрирования узла в пределах верхней пластины 711, центрирующее кольцо 742 нижней пластины для центрирования узла в пределах нижней пластины 712 и кольцо 743 кулачковой пластины. Кольцо 743 кулачковой пластины имеет ось 745, которая смещена от оси 746 вращения корпуса 740. Исполнительный механизм может избирательно вращать кулачковую пластину 713, которая будет вызывать вращение роликовых узлов 710, установленных в роликовой пластине 710 в виде группы, как обозначено стрелками 760, допуская регулируемую ориентацию многонаправленных роликовых узлов относительно верхней пластины 711 и нижней пластины 712.
Фиг. 27A, 27B и 27C иллюстрируют роликовую пластину 800, содержащую множество многонаправленных роликовых узлов 10 согласно еще одному варианту осуществления изобретения. Иллюстративная пластина 800 является круглой и вмещает семь роликовых узлов 10 в трех рядах. Пластина 800 содержит верхнюю пластину 811 и нижнюю пластину 812 для установки роликовых узлов 10. Каждый корпус 40 узла содержит зубья 41 шестерни, расположенные по периметру с созданием большого прямозубой цилиндрической шестерни. Дополнительные более маленькие цилиндрические прямозубые шестерни 842 расположены между многонаправленными роликовыми узлами. Приводная шестерня 843 соединена с вращающимся исполнительным механизмом. Когда вращающийся исполнительный механизм поворачивается, приводная шестерня 643, шестерни 642, 643 и зубья 641 шестерни передают вращательное движение во все роликовые узлы, вызывая поворот узлов в виде группы и допуская регулируемую ориентацию многонаправленных роликовых узлов 10 относительно верхней пластины 811 и нижней пластины 812.
Фиг. 28 иллюстрирует транспортировочную систему 900, содержащую множество роликовых пластин 910, каждая из которых вмещает множество многонаправленных роликовых узлов. Иллюстративная транспортировочная система 900 используется для изменения ориентации транспортируемого изделия. Транспортирующая система 900 содержит раму или корпус 901 и множество круглых роликовых пластин 910, каждая из которых вмещает множество многонаправленных роликовых узлов. Транспортерная лента 930, расположенная под роликовыми пластинами 910, приводит в движение многонаправленные роликовые узлы 10. Каждая роликовая пластина 910 содержит верхнюю пластину 921 и нижнюю пластину 922, как подробно показано на Фиг. 29. Нижняя пластина 922 содержит зубья 923 шестерни по своей периферии для зацепления прямозубой цилиндрической шестерни 925. Исполнительный механизм 940 избирательно поворачивает прямозубую цилиндрическую шестерню 925 для изменения ориентации множества многонаправленных роликовых узлов. Несмотря на то, что варианты осуществления Фиг. 28 и 29 показывают зубья 923 шестерни на нижней пластине 922 роликовой пластины 910, зубья шестерни для зацепления шестерни с целью изменения ориентации роликовой пластины 910 может также или в качестве альтернативы содержать верхняя пластина 921.
Многонаправленный роликовый узел 10 может выполнять ряд различных функций, таких как, но без ограничения, сортировка, выравнивание, маневрирование и поворачивание изделий. Например, множество многонаправленных роликовых узлов может быть использовано для сортировки изделий, проходящих через транспортировочную систему, с минимумом столкновений между изделиями. Для сортировки изделий, многонаправленные роликовые узлы избирательно вращаются в группах, выстроенных вдоль пути перемещения транспортировочной системы. Транспортерная лента или другое приводное устройство расположено ниже многонаправленных роликовых узлов. Система управления создает образ поступающего транспортируемого изделия, рассчитывает траектории вдоль системы для каждого изделия и ориентирует многонаправленные роликовые узлы согласно траектории для упорядоченного и быстрого отклонения изделия от пути перемещения.
Еще один вариант применения включает использование многонаправленного роликового узла для выравнивания изделий, как показано на Фиг. 30A, 30B и 31. Система 1100 выравнивания содержит множество роликовых пластин 1110, каждая из которых вмещает множество многонаправленных роликовых узлов, для поступательного перемещения или вращения и регистрирования изделия относительно неподвижного объекта. Многонаправленные роликовые узлы 10 поддерживают транспортируемое изделие, проиллюстрированное в виде упаковки 1170, которая движется через систему. Многонаправленные роликовые узлы ориентированы с наклонным углом к направлению 1131 приводной транспортерной ленты 1130, как показано на Фиг. 31. Упаковка 25 1170, поддерживаемая роликовыми узлами 10, будет поступательно перемещаться по ширине системы 1100 в направлении стрелок 1186 до контакта с неподвижным объектом, проиллюстрированным в виде неподвижной направляющей 1150. Упаковка 1170 будет выравниваться с неподвижным объектом 1150.
Как показано на Фиг. 32A и 32B, группы многонаправленных роликовых узлов могут быть использованы в переключателе 1202 для транспортировочной системы 1200. Переключатель 1202 отводит изделия 1270 от одного или более подающих транспортеров 1204, движущихся в направлении стрелки 1211, к двум или более разгрузочным транспортерам 1206, 1208. Многонаправленные роликовые узлы 10 расположены в роликовых пластинах 1210, расположенных в группе, и приводной транспортер 1230 контактирует с роликами в роликовых пластинах для перемещения изделий поперек роликовых пластин 1210. Исполнительный механизм регулирует ориентацию каждой роликовой пластины 1210 для регулирования траектории изделий в системе и распределения изделий либо в первый разгрузочный транспортер 1206, либо во второй разгрузочный транспортер 1208.
Как показано на Фиг. 33, группы многонаправленных роликовых узлов могут быть использованы для избирательного поворота изделия в транспортировочной системе. Устройство поворота изделия в транспортировочной системе 1300 содержит множество поддерживающих изделия роликовых пластин 1310, каждая из которых содержит множество многонаправленных роликовых узлов 10. Подающий транспортер 1304 перемещает изделия 1370 к роликовым пластинам 1310, а разгрузочный транспортер 1306 перемещает вращающиеся изделия от роликовых пластин 1310. Приводной транспортер 1330 приводит в движение ролики в многонаправленных роликовых узлах для продвижения изделий через систему по выбранной траектории. Когда изделие 1370 полностью расположено на одной роликовой пластине 1310, исполнительный механизм избирательно поворачивает всю роликовую пластину на требуемый угол, что также поворачивает изделие 1370. Размер каждой роликовой пластины 1310 зависит от размера наибольшего изделия, подлежащего повороту, так как роликовая пластина должна поддерживать изделие, подлежащее повороту. Многонаправленные роликовые узлы могут вращаться в противоположных направлениях для поддержания должного прохождения изделий через транспортировочную систему.
Фиг. 34 иллюстрирует транспортировочную систему 1400 с использованием множества многонаправленных роликовых узлов для изменения направления транспортировки, при сохранении переднего края транспортируемого изделия. Система 1400 содержит множество роликовых пластин 1410, каждая из которых содержит множество поддерживающих изделия многонаправленных роликовых узлов 10. Система 1400 дополнительно содержит входной транспортер 1404 и множество выходных транспортеров 1406, 1407, 1408, расположенных в различных направлениях. Приводной транспортер 1430 проходит под роликовыми пластинами 1410 для приведения в движение роликов в многонаправленных роликовых узлах 10. На разгрузочном конце 1411 множества роликовых пластин 1410, многонаправленные роликовые узлы ориентированы для продвижения изделия 1470 вперед в контакте с узлами, как показано на Фиг. 35. На разгрузочном конце, многонаправленные роликовые узлы 10 ориентированы с главными осями 14 перпендикулярно направлению движения 1431 приводного транспортера 1430, так что направление движения 1480 изделий, контактирующих с находящимися дальше узлами 10, противоположно и параллельно направлению движения 1431 приводного транспортера 1430, толкая за счет этого изделия 1470 вперед. На загрузочном конце 1412, многонаправленные роликовые узлы избирательно ориентированы для направления изделия в направлении стрелок 1486 на одном из трех разгрузочных транспортеров 1406, 1407, 1408, как показано на Фиг. 36. В зависимости от их ориентации, которой можно управлять с помощью любого подходящего средства, как описано ранее, многонаправленные роликовые узлы 10 на загрузочном конце 1412, направляют изделие вперед на первый разгрузочный транспортер 1406, в сторону и назад относительно неподвижного бокового ограждения 1470 для направления изделия по второму разгрузочному транспортеру 1407 или в другую сторону и назад относительно еще одного неподвижного бокового ограждения 1471 для направления изделия по третьему разгрузочному транспортеру 1408.
Многонаправленный роликовый узел или множество многонаправленных роликовых узлов может быть использовано в любой подходящей системе, и любое подходящее средство может быть использовано для регулирования ориентации многонаправленных роликовых узлов для того, чтобы регулировать траекторию изделия.
Как предполагается в данных нескольких примерах, объем изобретения определяется формулой изобретения и не ограничен деталями описанных вариантов.
Реферат
Многонаправленный роликовый узел предназначен для направления изделия в транспортировочной системе. Многонаправленный роликовый узел имеет выполненную с возможностью поворота роликовую раму, вмещающую набор из двух параллельных, взаимно приводящих в движение роликов, каждый из которых выполен с возможностью вращения вокруг второстепенной, расположенной поперек главной оси в противоположном направлении от другого ролика в наборе. Многонаправленный роликовый узел направляет изделие, поддерживаемое узлом, вдоль траектории, определяемой ориентацией многонаправленного роликового узла относительно входного усилия. Ориентацию многонаправленного роликового узла можно изменять для изменения траектории. Транспортерная система может содержать множество многонаправленных роликовых узлов. Исполнительный механизм регулирует ориентацию многонаправленных роликовых узлов по отдельности, а также может регулировать множество многонаправленных роликовых узлов в виде группы. Обеспечиваются улучшенные сортировка, выравнивание, маневрирование, поворачивание и другие подобные операции при транспортировании изделий. 4 н. и 25 з.п. ф–лы, 67 ил.
Комментарии