Элеваторный стеллаж - RU2765507C1
Код документа: RU2765507C1
Чертежи


Описание
Изобретение относится к устройствам для хранения изделий в заданном порядке, а именно к стеллажам конвейерного типа с перемещением корзин по замкнутому контуру в вертикальной плоскости, и может применяться на складах или в магазинах для обслуживания покупателей.
Из уровня техники известен элеваторный стеллаж (SU 967890 A1, МПК B65G 17/48, опубл. 23.10.1982), который содержит раму, вертикально замкнутые тяговые цепи, протянутые вдоль направляющих, раздваивающихся на поворотных участках, и грузонесущие люльки, подвешенные на цепях рычажной системы, оси внешних шарниров которых связаны с цапфами люлек и имеют ролики, размещенные в направляющих с возможностью перемещения в них, при этом оси внешних шарниров снабжены жестко связанными с ними вертикально расположенными рычагами с роликами на концах, размещенными в направляющих.
Недостатком известного стеллажа является его низкая технологичность, связанная со сложностью конструкции шарниров, на которых установлены люльки.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признан элеваторный стеллаж (SU 1497130 A1, МПК B65G 1/127, опубл. 30.07.1980). Стеллаж содержит раму, смонтированные на ней вертикально размещенные бесконечно замкнутые грузонесущие цепи, огибающие ведущие и ведомые звездочки, и полки, шарнирно соединенные с одними концами тяг, другие концы которых соединены между собой и с грузонесущими цепями. Отличает стеллаж от известных аналогов то, что вторые концы тяг, число которых равно числу полок, соединены между собой жестко и жестко прикреплены к звеньям цепей, с образованием прямолинейного двуплечего рычага.
Недостатком известного технического решения является его низкая надежность, обусловленная тем, что для крепления корзин используются тяги, которые при движении корзин в верхнем и нижнем положениях испытывают сильные нагрузки на изгиб. Кроме того стеллаж не оборудован элементами автоматического управления, позволяющими перемещать корзины как в ручном, так и в автоматическом режимах.
Технической задачей, на решение которой направлено заявленное изобретение, является расширение функциональных возможностей элеваторного стеллажа.
Указанная задача решена тем, что элеваторный стеллаж содержит две вертикальные стойки, закрепленные на П-образном рамном основании и соединенные горизонтальными ребрами жесткости. На стойках закреплены верхние и нижние горизонтальные планки, на концах которых на осях установлены ведомые звездочки. Отличается стеллаж от аналогов тем, что под нижней планкой на подшипниках, закрепленных в вертикальных стойках, установлен ведущий вал с первой и второй ведущими звездочками, связанный механической передачей с валом ротора электродвигателя. Ведомые и ведущие звездочки огибают бесконечно замкнутые первая и вторая грузонесущие цепи, на которых закреплены проушины. В проушинах на горизонтальных осях свободно подвешены корзины. При этом первый конец каждой из осей закреплен в проушине первой цепи, а второй конец в соосной с ней проушине второй цепи. На боковых стенках корзин закреплены постоянные магниты, а на вершинах стоек закреплены магнитные датчики, выходы которых подключены к измерительным входам блока управления, снабженного модулем индикации, командной педалью и блоком ввода данных, при этом силовой выход блока управления подключен к электродвигателю.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков устройства, является расширение функциональных возможностей стеллажа, заключающееся в обеспечении автоматизации управления положением корзин, за счет применения в конструкции ведущего вала, связанного механической передачей с электродвигателем, магнитных датчиков и блока управления стеллажом.
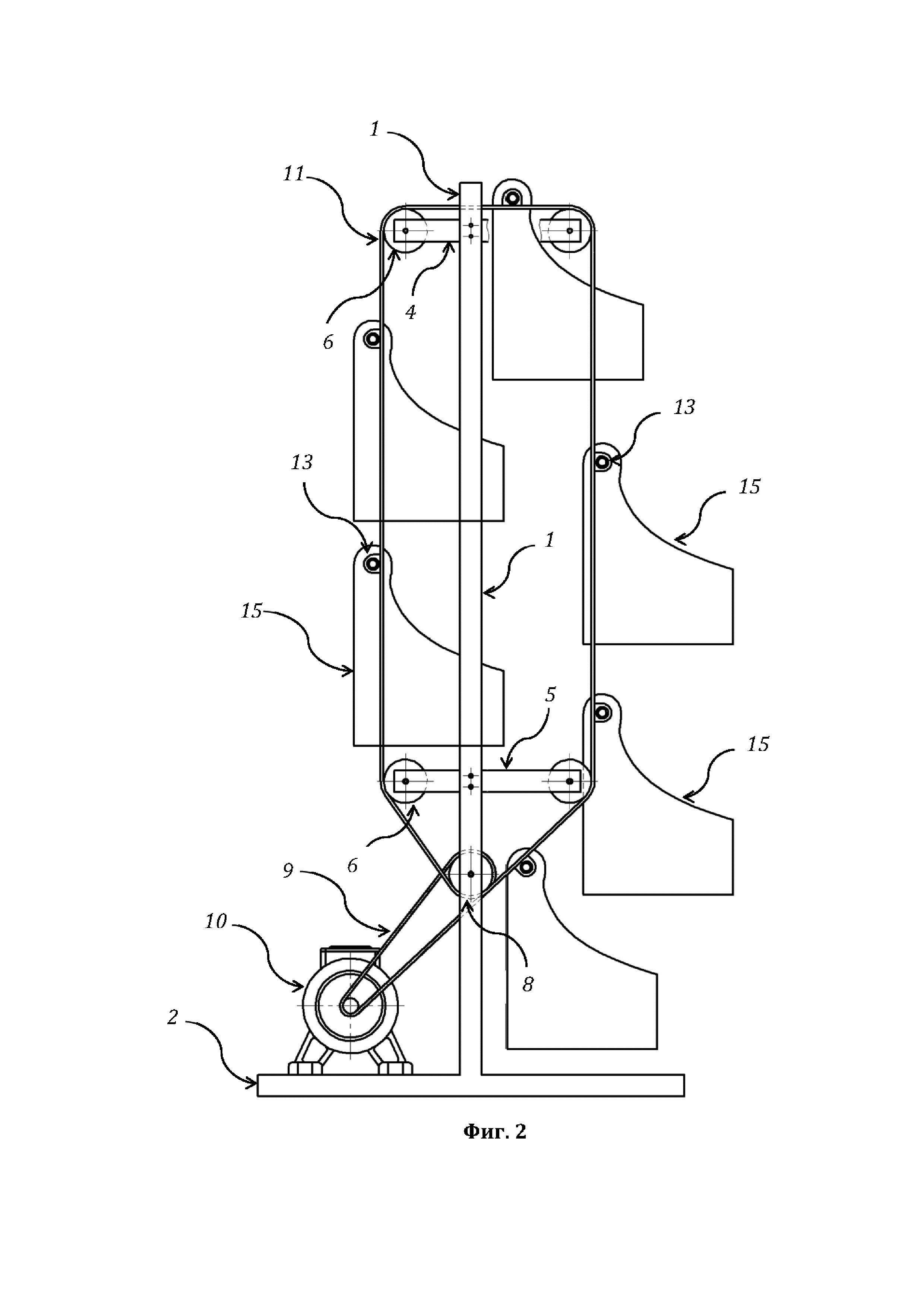
Конструкция элеваторного стеллажа поясняется чертежами, где на фиг. 1 показан его внешний вид в изометрической проекции; на фиг. 2 показан вид сбоку стеллажа; на фиг. 3 приведена упрощенная структурная схема блока управления.
Элеваторный стеллаж устроен следующим образом.
Его основой являются две вертикальные стойки 1, закрепленные на П-образном рамном основании 2 и соединенные горизонтальными ребрами жесткости 3. На стойках закреплены верхние и нижние горизонтальные планки 4 и 5, на концах которых на осях установлены ведомые звездочки 6. Под нижней планкой на подшипниках, закрепленных в вертикальных стойках 1, установлен ведущий вал 7 с первой и второй ведущими звездочками 8, связанный механической передачей 9, например цепной или ременной, с валом ротора электродвигателя 10. Ведомые и ведущие звездочки 6 и 8 огибают бесконечно замкнутые первая и вторая грузонесущие цепи 11 и 12, на которых закреплены проушины 13. В проушинах на горизонтальных осях 14 свободно подвешены корзины 15. При этом первый конец каждой из осей 14 закреплен в проушине первой цепи 11, а второй конец в соосной с ней проушине второй цепи 12. На боковых стенках корзин закреплены постоянные магниты (на фигурах условно не показаны), а на вершинах стоек 1 закреплены магнитные датчики 16 и 17, выполненные, например, в виде датчиков Холла, выходы которых подключены к измерительным входам 18 и 19 блока управления, закрепленного на боковой поверхности одной из вертикальных стоек 1, снабженного модулем индикации 20, командной педалью 21 и блоком ввода данных 22, при этом силовой выход 23 блока управления электрически подключен к электродвигателю 10.
Блок управления может быть выполнен на основе микроконтроллера, основанного на архитектуре STM8 (STM8 // EasyElectronics.ru URL: http://we.easyelectronics.ru/blog/STM8/ (дата обращения: 21.03.2019).), содержащего микропроцессорное ядро 24, соединенное с помощью системной шины с FLASH-памятью программ 25, SRAM-памятью данных 26, восьмиканальным двенадцатиразрядным аналого-цифровым преобразователем 27, энергонезависимой электрически перепрограммируемой памятью EEPROM 28, универсальными восьмиразрядными двунаправленными портами ввода-вывода 29, 30, 31 и универсальным синхронно-асинхронным приемопередатчиком USART 32. При этом к первому и второму каналам аналого-цифрового преобразователя 27 посредством операционных усилителей подключены измерительные входы 18 и 19 блока управления, к первому порту ввода-вывода 29 подключены модуль индикации 20, выполненный, например, на основе LCD-индикатора, и командная педаль 21, ко второму порту ввода-вывода 30 подключен блок ввода данных 22, выполненный в виде кнопочной клавиатуры, а третий порт ввода-вывода 31 подключен к силовому выходу 23, выполненному на основе транзисторных ключей.
Элеваторный стеллаж работает следующим образом.
Первоначально элеваторный стеллаж собирают, монтируя стойки 1 на П-образном рамном основании 2, и соединяют горизонтальными ребрами жесткости 3. Далее устанавливают ведущий вал 7, а на ведомые и ведущие звездочки 6 и 8 надевают бесконечно замкнутые грузонесущие цепи 11 и 12, c закрепленными на них проушинами 13. В проушины устанавливают горизонтальные оси 14 и подвешивают корзины 15. После чего выходы магнитных датчиков 16 и 17 подключают к измерительным входам 18 и 19 блока управления, а силовой выход последнего подключают к электродвигателю 10. При необходимости настройки режимов работы стеллажа, блок управления может быть дополнительно подключен к персональному компьютеру с помощью универсального синхронно-асинхронного приемопередатчика USART 32 посредством двунаправленного последовательного канала связи интерфейса обмена данными RS-232. Дополнительно в составе блока управления может использоваться радиомодуль, например модели HC-12 (на фигурах условно не показан), подключаемый к приемопередатчику USART 32. В этом случае связь с персональным компьютером может осуществляться по радиоканалу.
При использовании стеллажа режимы управления им настраивают с помощью блока ввода данных 22, выбирая нужный режим с помощью навигационных кнопок, ориентируясь при этом на его описание, отображаемое LCD-индикатором. Параметры каждого из режимов хранятся в энергонезависимой электрически перепрограммируемой памяти EEPROM 28 и могут быть настроены оператором. Далее рассмотрим примеры использования стеллажа в ручном и автоматическом режимах.
В ручном режиме управление электродвигателем 10 полностью контролируется с помощью командной педали 21. Микропроцессорное ядро 24 в соответствии с управляющей программой, хранящейся во FLASH-памяти программ 25, выполняет опрос первого порта ввода-вывода 29, к которому подключена командная педаль 21. При фиксации однократного нажатия на нее микроконтроллером на силовой выход 23 через третий порт ввода-вывода 31 подается управляющий сигнал, коммутирующий электродвигатель 10 с электрической сетью. Вращаясь, электродвигатель 10 передает вращение с вала ротора через механическую передачу 9 на ведущий вал 7, который в свою очередь приводит в движение грузонесущие цепи 11 и 12 с корзинами 15. Движение корзин происходит непрерывно до повторного нажатия на командную педаль 21, после которого микроконтроллер подает на силовой выход 23 через третий порт ввода-вывода 31 управляющий сигнал, отключающий электродвигатель 10.
В автоматическом режиме во время движения корзин микропроцессорное ядро 24 в соответствии с управляющей программой, хранящейся во FLASH-памяти программ 25, дополнительно к опросу командной педали 21 выполняет опрос магнитных датчиков 16 и 17 с помощью аналого-цифрового преобразователя 27. Каждое прохождение постоянных магнитов, закрепленных на стенках корзин 15, вызывает срабатывание магнитных датчиков 16 и 17. При этом блоком управления выполняется ряд автоматических операций, предусмотренных логикой управляющей программы и настройками режима ее работы. Например, после достижения очередной корзины вершин стоек 1 может выполняться автоматическое выключение электродвигателя 10. Может также вестись счет корзин и отключение электродвигателя после прохождения через вершины стоек 1 заданного количества корзин. Движение корзин может останавливаться также и с помощью нажатия на командную педаль 21, также как и при ручном режиме работы.
Таким образом, раскрытое в настоящей заявке изобретение, является удобным устройством, позволяющим автоматизировать процессы, связанные с хранением и сортировкой товаров на производственных складах или в магазинах, облегчая при этом труд работников и повышая качество обслуживания клиентов.
Реферат
Изобретение относится к устройствам для хранения изделий в заданном порядке, а именно к стеллажам конвейерного типа с перемещением корзин по замкнутому контуру в вертикальной плоскости. Элеваторный стеллаж содержит две вертикальные стойки, закрепленные на П-образном рамном основании и соединенные горизонтальными ребрами жесткости. На стойках закреплены верхние и нижние горизонтальные планки, на концах которых на осях установлены ведомые звездочки. Под нижней планкой на подшипниках, закрепленных в вертикальных стойках, установлен ведущий вал с первой и второй ведущими звездочками, связанный механической передачей с валом ротора электродвигателя. Ведомые и ведущие звездочки огибают бесконечно замкнутые первая и вторая грузонесущие цепи, на которых закреплены проушины. В проушинах на горизонтальных осях свободно подвешены корзины. При этом первый конец каждой из осей закреплен в проушине первой цепи, а второй конец в соосной с ней проушине второй цепи. На боковых стенках корзин закреплены постоянные магниты, а на вершинах стоек закреплены магнитные датчики, выходы которых подключены к измерительным входам блока управления, снабженного модулем индикации, командной педалью и блоком ввода данных, при этом силовой выход блока управления подключен к электродвигателю. Изобретение обеспечивает автоматизацию управления положением корзин. 9 з.п. ф-лы, 3 ил.

Комментарии