Автоматизированная транспортно-складская система, содержащая грузоподъемник, взаимодействующий с передающим устройством и устройством задания последовательности - RU2686285C2
Код документа: RU2686285C2
Чертежи








Описание
Область техники, к которой относится изобретение
Изобретение относится к области логистики.
Более конкретно, изобретение относится к автоматизированной транспортно-складской системе, включающей в себя, в частности, следующие элементы: систему управления, по меньшей мере один блок хранения, содержащий несколько уровней, с которых грузы могут быть выбраны или на которые грузы могут быть помещены, по меньшей мере один промежуточный конвейер для подачи и выдачи грузов в систему/из системы и по меньшей мере один грузоподъемник для транспортирования грузов между промежуточным конвейером и, по меньшей мере, одним блоком хранения.
Изобретение может быть применено, в частности, но не исключительно, когда каждый многоуровневый блок хранения является таким, как описано далее со ссылкой на фиг. 1А, 1В и 1С. В более общем смысле, изобретение может быть применено в любой ситуации, в которой грузы (в бочках, картонных коробках, ящиках и т.п.) собраны или становятся доступными на ряде уровней.
Уровень техники
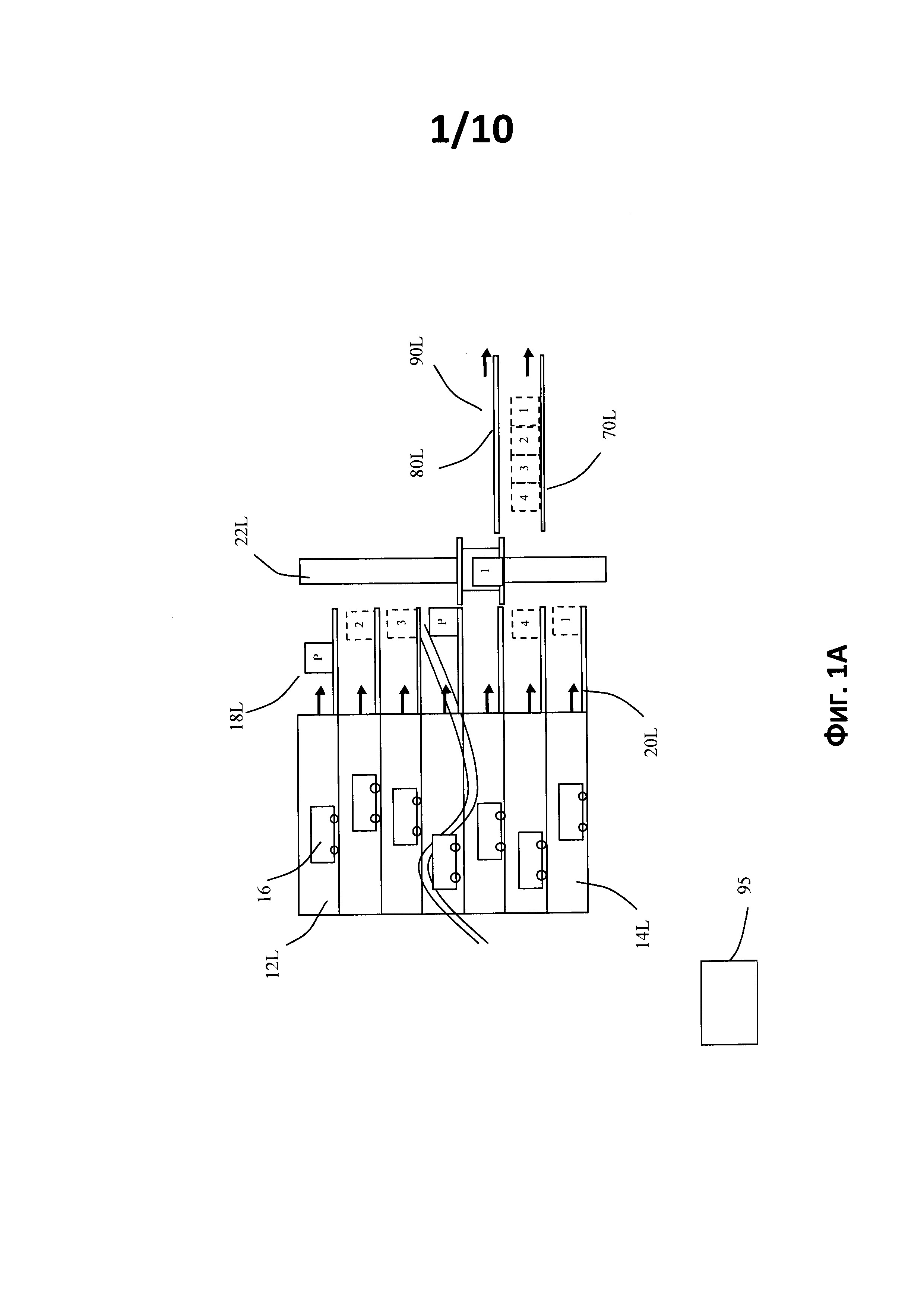
На фиг. 1А, 1В и 1С показан пример автоматизированной транспортно-складской системы согласно предшествующему уровню техники (вид сбоку левой части, вид сбоку правой части и вид сверху, соответственно).
Согласно этому примеру система содержат блок Е1 хранения, содержащий два стеллажа 12L и 12R с расположенными друг над другом уровнями (14L и 14R) и подразделенные на ячейки (с двойной глубиной в этом примере), каждая из которых предназначена для приема двух грузов Р.
Блок Е1 хранения также содержит выходную буферную станцию 18L и входную буферную станцию 18R. Выходная буферная станция 18L расположена на одном конце стеллажа 12L и примыкает к нему. Она образована рядом выходных буферных конвейеров 20L. Количество выходных буферных контейнеров 20L является таким же, как количество уровней 14L в стеллаже 12L. Входная буферная станция 18R расположена на одном конце стеллажа 12R и примыкает к нему. Она образована рядом входных буферных конвейеров 20R. Количество входных буферных конвейеров 20R является таким же, как количество уровней 14R в стеллаже 12R. Буферные конвейеры 20R и 20L могут быть, например, с приводом от двигателя с двойным направлением вращения.
Проход обслуживает два стеллажа 12R и 12L и содержит на каждом уровне канал для перемещения. Транспортирующие средства 16 (например, по одному на уровень, с приводом от двигателя и с одиночным грузом или множеством грузов) позволяют посредством перемещения по каналам перевозить грузы между местами (внутри стеллажей 12R и 12L) и буферными конвейерами 20R, 20L. Каждое транспортирующее средство 16 заданного уровня имеет доступ к ячейкам (внутри стеллажей 12R и 12L) и буферным конвейерам 20R и 20L этого заданного уровня.
Для облегчения описания рассмотрена ось (указана как «А» на фиг. 1С) прохода между двумя стеллажами 12R и 12L, а понятие «правая часть системы» (указана как «D» на фиг. 1С) и «левая часть системы» (указана как «G» на фиг. 1С) обозначают две части системы, расположенные по обе стороны от этой оси А. Следует отметить, что «вид сбоку правой части», представленный на фиг. 1В и «вид с левой стороны», представленный на фиг. 1А, оба являются видами вдоль одного и того же направления (казанного как «10» на фиг. 1С). Это замечание действительно для всех видов сбоку правой и левой частей, описанных далее.
Система также содержит два грузоподъемника 22R и 22L. Каждый грузоподъемник расположен в конце буферных конвейеров 20R и 20L, находящихся на конце одного из стеллажей 12R и 12L. Каждый грузоподъемник имеет один уровень, чтобы транспортировать груз, поданный одним из буферных конвейеров 20L и 20R. В первом известном варианте (не показан) каждый грузоподъемник использует один уровень, чтобы передавать два груза. Во втором известном варианте (не показан) каждый грузоподъемник имеет два расположенных друг над другом уровня, каждый из которых используется для транспортирования двух грузов (задавая общую грузоподъемность, равную четырем грузам).
На каждом грузоподъемнике 22R и 22L маркирован управляемый ограничитель, стоящий перед каждым буферным конвейером 20R и 20L. Эти ограничители используют при получении входящих/исходящих грузов на стеллажах 12R и 12L.
Каждый грузоподъемник расположен, во-первых, между буферными конвейерами 20R и 20L, расположенными в конце одного из стеллажей 12R и 12L, и, во-вторых, имеет промежуточные конвейеры для входа/выхода грузов в систему и из системы. В показанном примере грузоподъемник 22R правой части системы связан с двумя входными промежуточными конвейерами 70R и 80R, образующими входную промежуточную станцию 90R (см. фиг. 1В), а грузоподъемник 22L левой части системы связан с двумя выходными промежуточными конвейерами 70L и 80L, образующими выходную промежуточную станцию 90L (см. фиг. 1А). Другими словами, каждый грузоподъемник 22R и 22L позволяет перемещать грузы между: с одной стороны, буферными конвейерами 20R и 20L в конце одного из стеллажей 12R и 12L и, с другой стороны, входными промежуточными конвейерами 70R и 80R и выходными промежуточными конвейерами 70L и 80L.
Входные промежуточные конвейеры 70R и 80R, грузоподъемник 22R и буферные конвейеры 20R (то есть, элементы правой части), а также транспортирующие средства 16 (общие для правой и левой частей) подают грузы на два стеллажа 12R и 12L. Выходные промежуточные конвейеры 70L и 80L, грузоподъемник 22L и буферные конвейеры 20L (то есть, элементы левой части), а также транспортирующие средства 6 (общие для правой и левой частей) получают выход грузов с двух стеллажей 12R и 12L. Транспортирующие средства имеют доступ к ячейкам стеллажа 12R правой части, а также к ячейкам стеллажа 12L левой части.
Система управления (показана прямоугольником со ссылочным обозначением 95) управляет, по меньшей мере, определенными элементами блока Е1 хранения (например, буферными конвейерами и транспортирующими средствами), грузоподъемниками 22R и 22L и входными промежуточными конвейерами 70R и 80R и выходными промежуточными конвейерами 70L и 80L.
Одним из недостатков такой транспортно-складской системы согласно предшествующему уровню техник является то, что продолжительность цикла каждого грузоподъемника, как доказано, является относительно большой по сравнению с количеством выполняемых действий по входу или выходу. Действительно, при каждом действии входа или выхода груза, половина цикла «тратится» на перемещение грузоподъемника в незаполненном состоянии и не образует действия с добавленной стоимостью.
Ни один из упомянутых выше, первый известный вариант (каждый грузоподъемник имеет один уровень, чтобы транспортировать два груза) или второй известный вариант (каждый грузоподъемник имеет два расположенных друг над другом уровня, каждый из которых позволяет транспортирование двух грузов), не позволяют преодолеть этот недостаток.
В более общем смысле, одна из проблем, возникающих при разработке автоматизированных транспортно-складских систем, состоит в том, чтобы оптимизация реализации каждого из элементов, образующих систему и, в частности, грузоподъемников, и оптимизация общего шага системы позволяли, например, достигнуть цели с точки зрения подготовки заказов (то есть, сделать доступными много грузов, чтобы подготовить ряд заказов в заданное время).
Другой ряд проблем связан с производительностью, чтобы иметь возможность подавать грузы в требуемом порядке, когда они выходят от системы. Этот ряд проблем известен как «ограничение по установлению последовательности».
Задачи изобретения
Изобретение, по меньшей мере, в соответствии с одним вариантом осуществления направлено, главным образом, на преодоление этих различных недостатков решений предшествующего уровня техники.
Более конкретно, задача, по меньшей мере, одного варианта осуществления изобретения состоит в создании способа, позволяющего значительно увеличить общий шаг автоматизированной транспортно-складской системы (по сравнению с системами предшествующего уровня техники, особенно такого типа, как описано выше со ссылкой на фиг. 1А, 1В и 1С), в то же время соблюдая ограничения установления последовательности.
Другая задача, по меньшей мере, одного варианта осуществления изобретения состоит в создании способа такого вида, который прост для осуществления при малых затратах.
Дополнительная задача, по меньшей мере, одного варианта осуществления изобретения состоит в создании способа такого типа, который совместим с многопоточной работой (один или более потоков грузов на входе и/или один или более потоков грузов на выходе).
Раскрытие изобретения
Согласно одному из частных вариантов осуществления изобретения автоматизированная транспортно-складская система включает в себя систему управления, по меньшей мере один блок хранения, содержащий несколько уровней, с которых грузы могут быть выбраны или на которые грузы могут быть помещены, и по меньшей мере один выходной промежуточный конвейер для выхода грузов из системы. Система дополнительно включает в себя выходной грузоподъемник, содержащий K уровней, где K≥2, выходное передающее устройство, содержащее К уровней, и выходное устройство задания последовательности, снабженное средством вертикального перемещения. Система управления выполнена с возможностью управления:
- передачей при каждом повторении цикла подъема/спуска выходного грузоподъемника группы из N грузов из, по меньшей мере, одного многоуровневого блока хранения на выходной грузоподъемник, где N меньше или равно грузоподъемности выходного грузоподъемника, выраженной в количестве грузов;
- передачей одновременно на K уровнях каждой группы из N грузов от выходного грузоподъемника к выходному передающему устройству; и
- передачей каждой группы из N грузов через выходное устройство задания последовательности от выходного передающего устройства на, по меньшей мере, один выходной промежуточный конвейер при ограничении порядка отправки N грузов на указанном, по меньшей мере, одном выходном промежуточном конвейере.
Согласно одному из частных вариантов осуществления изобретения автоматизированная транспортно-складская система включает в себя систему управления, по меньшей мере один блок хранения, содержащий несколько уровней, с которых грузы могут быть выбраны или на которые грузы могут быть помещены, и по меньшей мере один входной промежуточный конвейер для входа грузов в систему. Система дополнительно включает в себя входной грузоподъемник, содержащий K уровней, где K≥2, входное передающее устройство, содержащее K уровней, и входное устройство задания последовательности, снабженное средством вертикального перемещения. Система управления выполнена с возможностью управления:
- передачей грузов через входное устройство задания последовательности от указанного, по меньшей мере, одного входного промежуточного конвейера к входному передающему устройству при формировании на входном передающем устройстве групп из N грузов, распределенных по K уровням с N, меньшим или равным грузоподъемности входного грузоподъемника, выраженной в количестве грузов;
- передачей одновременно на K уровнях каждой группы из N грузов от входного передающего устройства на входной грузоподъемник; и
- передачей при каждом повторении цикла подъема/спуска входного грузоподъемника каждой группы из N грузов от входного грузоподъемника к, по меньшей мере, одному многоуровневому блоку хранения при ограничении расположения N грузов.
Согласно одному из частных вариантов осуществления изобретения автоматизированная транспортно-складская система включает в себя систему управления, по меньшей мере один блок хранения, содержащий несколько уровней, с которых грузы могут быть выбраны или на которые грузы могут быть помещены, по меньшей мере один промежуточный конвейер для входа и/или выхода грузов в систему / из системы и по меньшей мере один промежуточный конвейер для входов и/или выходов грузов в систему / из системы и по меньшей мере один грузоподъемник для передачи грузов между указанным по меньшей мере одним промежуточным конвейером и по меньшей мере одним блоком хранения. По меньшей мере, один грузоподъемник является многоуровневым грузоподъемником, и автоматизированная транспортно-складская система дополнительно включает в себя:
- по меньшей мере одно многоуровневое передающее устройство, способное одновременно принимать на нескольких уровнях ряд грузов, предназначенных и поступающих от, по меньшей мере, одного грузоподъемника; и
- по меньшей мере одно устройство задания последовательности, снабженное средством вертикального перемещения и способное передавать грузы между, по меньшей мере, одним многоуровневым передающим устройством и, по меньшей мере, одним промежуточным конвейером.
Общий принцип изобретения поэтому состоит в замене одноуровневого грузоподъемника предшествующего уровня техники на комбинацию трех элементов:
• многоуровневый грузоподъемник, который значительно увеличивает общую скорость автоматизированной транспортно-складской системы, поскольку при каждом повторении цикла подъема/спуска многоуровневого грузоподъемника, этот грузоподъемник может транспортировать группу из N грузов (где N≤Nmax и Nmax является грузоподъемностью грузоподъемника, выраженной в количестве грузов);
• многоуровневое передающее устройство, выполняющее буферную функцию, позволяющую группе из N грузов приостанавливаться, после того, как они выгружены грузоподъемником (в случае выхода грузов), или перед тем, как они будут загружены на грузоподъемник (в случае входа грузов) (грузоподъемность многоуровневого передающего устройства, например, равна или больше, чем у многоуровневого грузоподъемника); и
• устройство задания последовательности, выполняющее функцию установления последовательности, позволяющую передавать в определенном порядке (то есть, в требуемой последовательности) грузы от многоуровневого передающего устройства к, по меньшей мере, одному выходному промежуточному конвейеру (в случае выхода грузов) или от, по меньшей мере, одного входного промежуточного конвейера к многоуровневому передающему устройству (в случае входа грузов).
Эта комбинация трех элементов поэтому дает возможность достигнуть желаемой цели, а именно, существенно увеличить общую скорость автоматизированной транспортно-складской системы, в то же время соблюдая ограничения по установлению последовательности.
В соответствии с одной из частных особенностей, по меньшей мере, один многоуровневый грузоподъемник и, по меньшей мере, одно многоуровневое передающее устройство являются устройствами для множества грузов на каждом уровне.
Таким образом, общая скорость автоматизированной транспортно-складской системы дополнительно увеличивается.
В соответствии с одной из частных особенностей, по меньшей мере, один многоуровневый грузоподъемник и, по меньшей мере, одно многоуровневое передающее устройство содержат два уровня с грузоподъемностью двух грузов на каждом уровне.
Таким образом, каждый грузоподъемник и каждое передающее устройство обрабатывают группы по четыре груза (N=4), что является эффективным компромиссом между полученной скоростью и сложностью этих устройств.
Согласно одному из альтернативных вариантов осуществления, по меньшей мере, одно многоуровневое передающее устройство снабжено средством вертикального перемещения и заменяет, по меньшей мере, одно устройство задания последовательности.
Таким образом, согласно этому варианту многоуровневое передающее устройство действует как устройство задания последовательности. Эта альтернатива поэтому более компактна и уменьшает необходимые технические средства.
В соответствии с одной из частных особенностей, по меньшей мере, одно устройство задания последовательности содержит только один уровень.
Таким образом, устройство задания последовательности просто в реализации, обращении и управлении.
В соответствии с одной из частных особенностей, по меньшей мере, один многоуровневый блок хранения содержит по меньшей мере один многоуровневый стеллаж, по меньшей мере, каждый уровень которого подразделяется на приемные ячейки для получения по меньшей мере одного груза; по меньшей мере, одну многоуровневую буферную станцию, каждый уровень которой содержит буферный конвейер, помещенный на одном конце уровня, по меньшей мере, одного стеллажа; и средство передачи грузов между ячейками и буферными конвейерами и по меньшей мере один грузоподъемник, позволяющий передавать грузы между указанным, по меньшей мере, одним промежуточным конвейером и, по меньшей мере, одной буферной станцией.
Другими словами, способ согласно изобретению может быть реализован в условиях, когда каждый многоуровневый блок хранения классического типа, как описано выше со ссылкой на фиг. 1А, 1В и 1С.
В соответствии с одной из частных особенностей, автоматизированная транспортно-складская система включает в себя первый и второй многоуровневые блоки хранения, каждый из которых содержит по меньшей мере одну многоуровневую ступень, по меньшей мере одну буферную станцию и средство передачи и по меньшей мере один грузоподъемник, расположенный между буферными станциями первого и второго многоуровневых блоков хранения для передачи грузов между указанными, по меньшей мере, одним промежуточным конвейером и буферными станциями первого и второго многоуровневых блоков хранения.
Таким образом, способ согласно изобретению может быть реализован в условиях, когда каждый грузоподъемник взаимодействует с двумя многоуровневыми блоками хранения.
В соответствии с одной из частных особенностей между двумя последовательными уровнями, по меньшей мере, одного многоуровневого передающего устройства и двумя уровнями двух расположенных вертикально друг над другом промежуточных конвейеров обеспечено одинаковое расстояние.
Это минимизирует перемещения устройства задания последовательности.
В соответствии с одной из частных особенностей уровни, по меньшей мере, одного многоуровневого передающего устройства выровнены по вертикали с уровнями двух вертикально расположенных друг над другом промежуточных конвейеров.
Это дополнительно минимизирует перемещения устройства задания последовательности.
В соответствии с одной из частных особенностей автоматизированная транспортно-складская система включает в себя по меньшей мере один дополнительный буферный конвейер, не содержащийся по меньшей мере в одном многоуровневом блоке хранения, и система управления выполнена с возможностью управления передачей грузов между указанным, по меньшей мере, одним дополнительным буферным конвейером и указанным, по меньшей мере, одним грузоподъемником во время повторения цикла подъема/спуска указанного, по меньшей мере, одного грузоподъемника.
Таким образом, грузоподъемник или грузоподъемники могут осуществлять вход или выход грузов на дополнительные буферные конвейеры и с них, причем эти конвейеры образуют промежуточные стеллажи, используемые в качестве буфера, чтобы по мере необходимости регулировать поток грузов.
В первой реализации автоматизированная транспортно-складская система содержит по меньшей мере один выходной промежуточный конвейер, выходной грузоподъемник, выходное многоуровневое передающее устройство и выходное устройство задания последовательности, а система управления выполнена с возможностью управления:
- передачей грузов от, по меньшей мере, одного многоуровневого блока хранения на выходной грузоподъемник, позволяя выбрать группу из N грузов при каждом повторении цикла подъема/спуска выходного грузоподъемника с N≤Nmax грузов, и Nmax является грузоподъемностью выходного грузоподъемника, выраженной в количестве грузов;
- передачей одновременно на нескольких уровнях с выходного грузоподъемника на выходное многоуровневое устройство каждой группы из N грузов; и
- передачей через выходное устройство задания последовательности от выходного многоуровневого передающего устройства к, по меньшей мере, одному выходному промежуточному конвейеру каждой группы из N грузов при ограничении порядка отправки N грузов на указанном, по меньшей мере, одном промежуточном конвейере.
Эта первая реализация позволяет выпускать грузы из автоматизированной транспортно-складской системы (работающей в режиме "выдачи грузов").
Для этой первой реализации предназначены различные частные особенности.
В соответствии с одной из частных особенностей выходной грузоподъемник является грузоподъемником для множества грузов на каждом уровне, и система управления выполнена с возможностью управлению каждой группой из N грузов и установления последовательности грузов, размещенных на каждом уровне выходного грузоподъемника, причем указанное установление последовательности совместимо с указанным ограничением порядка отправки N грузов.
Таким образом, установление последовательности грузов на каждом уровне выходного грузоподъемника (установление последовательности, которая сохраняется на каждом уровне выходного многоуровневого передающего устройства) упрощает функцию установления последовательности, выполняемую выходным устройством задания последовательности (между выходным многоуровневым передающим устройством и, по меньшей мере, одним выходным промежуточным конвейером).
В соответствии с одной из частных особенностей автоматизированная транспортно-складская система включает в себя по меньшей мере два выходных промежуточных конвейера, каждый из которых связан с отдельным потоком грузов, и система управления выполнена с возможностью управления с помощью выходного устройства задания последовательности передачей каждому выходному промежуточному конвейеру грузов, принадлежащих к связанному с ним потоку грузов.
Таким образом, способ согласно изобретению является совместимым с многопотоковой операцией выхода (то есть, несколько потоков грузов на выходе).
В соответствии с одним из вариантов выходное многоуровневое передающее устройство снабжено средством вертикального перемещения и заменяет собой выходное устройство задания последовательности, и система управления выполнена с возможностью управления передачей каждой группы из N грузов непосредственно от выходного многоуровневого передающего устройства на, по меньшей мере, один выходной промежуточный конвейер.
Таким образом, в этом варианте выходное многоуровневое передающее устройство действует как выходное устройство задания последовательности.
Во второй реализации (в случае входов, то есть, складирования грузов), автоматизированная транспортно-складская система включает в себя по меньшей мере один входной промежуточный конвейер, один входной грузоподъемник, одно входное многоуровневое передающее устройство и одно входное устройство задания последовательности, а система управления выполнена с возможностью управления:
- передачей грузов через входное устройство задания последовательности от указанного, по меньшей мере, одного входного промежуточного конвейера к входному многоуровневому передающему устройству при формировании на входном многоуровневом передающем устройстве группы из N грузов, распределенных на нескольких уровнях с N≤Nmax, где Nmax является грузоподъемностью входного грузоподъемника, выраженной в количестве грузов;
- передачей одновременно на нескольких уровнях от входного многоуровневого передающего устройства к входному грузоподъемнику каждой группы из N грузов;
- передачей каждой группы из N грузов от входного грузоподъемника к, по меньшей мере, одному многоуровневому блоку хранения при ограничении размещения N грузов при каждом повторении цикла подъема/опускания входного грузоподъемника.
Эта вторая реализация позволяет вход грузов в автоматизированную транспортно-складскую систему (работу в режиме «складирования грузов»).
Для этой второй реализации предназначены различные частные особенности.
В соответствии с одной из частных особенностей входной грузоподъемник является грузоподъемником для множества грузов на каждом уровне, и система управления выполнена с возможностью управления каждой группой из N грузов, установлением последовательности входным устройством задания последовательности для грузов, расположенных на каждом уровне входного многоуровневого передающего устройства, причем указанное установление последовательности совместимо с указанным ограничением размещения N грузов.
Таким образом, установление последовательности (выполняемое входным устройством задания последовательности) грузов на каждом уровне входного многоуровневого передающего устройства (установление последовательности, которое сохраняется на каждом уровне входного грузоподъемника) упрощает соблюдение ограничения по размещению N грузов (по меньшей мере, на одном многоуровневом блоке хранения) при каждом повторении цикла подъема/спуска входного грузоподъемника.
В соответствии с одной из частных особенностей автоматизированная транспортно-складская система включает в себя по меньшей мере два входных промежуточных конвейера, каждый из которых связан с отдельным потоком грузов, и систему управления, выполненную с возможностью управления с помощью входного устройства задания последовательности передачей от каждого входного промежуточного конвейера грузов, принадлежащих связанному с ним потоку грузов.
Таким образом, способ согласно изобретению совместим с многопоточной входной операцией (то есть, несколько потоков грузов на входе).
В соответствии с одним из вариантов обеспечено входное многоуровневое передающее устройство, снабженное средством вертикального перемещения и заменяющее входное устройство задания последовательности, и система управления выполнена с возможностью управления передачей каждой группы из N грузов непосредственно от, по меньшей мере, одного промежуточного конвейера к входному многоуровневому передающему устройству.
Таким образом, в этом варианте входное многоуровневое передающее устройство действует как входное устройство задания последовательности.
Согласно другому варианту осуществления изобретения способ выдачи в автоматизированной транспортно-складской системе, как она раскрыта выше, содержит этапы, на которых:
- передают грузы от, по меньшей мере, одного многоуровневого блока хранения на выходной грузоподъемник, позволяющий выбрать группу из N грузов при каждом повторении цикла подъема/спуска выходного грузоподъемника с N ≤ Nmax, где Nmax является грузоподъемностью выходного грузоподъемника, выраженной в количестве грузов;
- передают одновременно на нескольких уровнях от выходного грузоподъемника на выходное многоуровневое передающее устройство каждую группу из N грузов;
- передают через выходное устройство задания последовательности от выходного многоуровневого передающего устройства на, по меньшей мере, один выходной промежуточный конвейер каждую группу из N грузов при указанном ограничении порядка отправки N грузов на, по меньшей мере, одном выходном промежуточном конвейере.
Согласно другому варианту осуществления изобретения способ складирования в автоматизированной транспортно-складской системе, как она раскрыта выше, содержит этапы, на которых:
- передают грузы через входное устройство задания последовательности от указанного, по меньшей мере, одного входного промежуточного конвейера на входное многоуровневое передающее устройство при формировании на входном многоуровневом передающем устройстве групп из N грузов, распределенных на нескольких уровнях с N ≤ Nmax, где Nmax является грузоподъемностью входного грузоподъемника, выраженной в количестве грузов;
- передают одновременно на нескольких уровнях от входного многоуровневого передающего устройства на входной грузоподъемник каждую группу из N грузов;
- передают каждую группу из N грузов от входного грузоподъемника на, по меньшей мере, один многоуровневый блок хранения при указанном ограничении размещения N грузов при каждом повторении цикла подъема/спуска входного грузоподъемника.
Согласно другому варианту осуществления изобретения обеспечивается компьютерный программный продукт, содержащий команды управляющей программы для осуществления способа выдачи и/или способа складирования, указанных выше (в любом из их различных вариантов осуществления), когда указанная программа выполняется на компьютере.
Согласно другому варианту осуществления изобретения обеспечивается Энергонезависимый, считываемый компьютером носитель данных, хранящий набор команд, выполненных с возможностью исполнения компьютером, для осуществления способа выдачи и/или способа складирования, указанных выше (в любом из их различных вариантов осуществления).
Другие особенности и преимущества изобретения станут понятны из последующего описания на поясняющем и неисчерпывающем примере со ссылками на чертежи.
Краткое описание чертежей
На фиг. 1А, 1В и 1С показан пример автоматизированной транспортно-складской системы согласно предшествующему уровню техники (вид сбоку левой части, вид сбоку правой части и вид сверху, соответственно), уже описанной со ссылкой на предшествующий уровень техники;
на фиг. 2А, 2В и 2С - автоматизированная транспортно-складская система согласно первому варианту осуществления изобретения (вид сбоку левой части, вид сбоку правой части и вид сверху, соответственно);
на фиг. 3 - автоматизированная транспортно-складская система согласно второму варианту осуществления изобретения (вид сбоку левой части);
на фиг. 4 - автоматизированная транспортно-складская система согласно третьему варианту осуществления изобретения (вид сбоку левой части); и
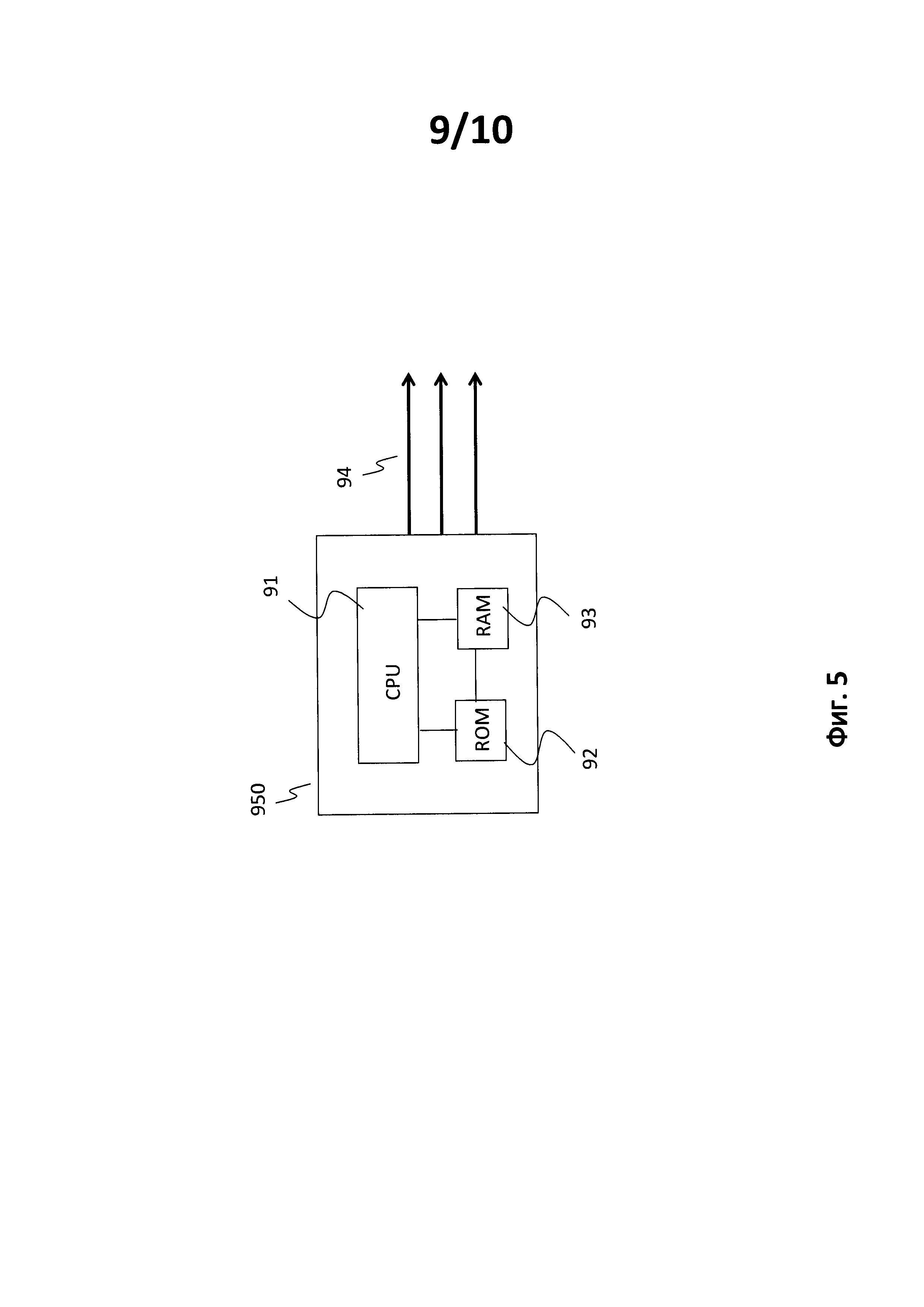
на фиг. 5 - упрощенная структура системы управления согласно одному частному варианту осуществления изобретения;
на фиг. 6 - блок-схема осуществления способа выдачи согласно одному частному варианту осуществления изобретения; и
на фиг. 7 - блок-схема осуществления способа складирования согласно одному частному варианту осуществления изобретения.
Осуществление изобретения
На всех чертежах одинаковые элементы указаны одними и теми же ссылочными обозначениями.
На фиг. 2А, 2В и 2С показана автоматизированная транспортно-складская система согласно первому варианту осуществления изобретения (вид сбоку левой части, вид сбоку правой части и вид сверху, соответственно).
Система отличается от системы предшествующего уровня техники, дополнительно описанной выше со ссылкой на фиг. 1А, 1В и 1С, тем, что:
• для левой части она содержит выходной многоуровневый грузоподъемник 222L, выходное многоуровневое передающее устройство 34L и выходное устройство 40L задания последовательности;
• для правой части она содержит входной многоуровневый грузоподъемник 222R, входное многоуровневое передающее устройство 34R и входное устройство 40R задания последовательности.
Кроме того, система 950 управления изменена по сравнению с системой предшествующего уровня техники и позволяет управлять этими отдельными элементами (222L, 222R, 34L, 34R, 40L, 40R).
Со ссылкой на фиг. 2А и 2С представлен подробный вид левой части.
В этом примере выходной многоуровневый грузоподъемник 222L является «грузоподъемником на четыре груза»: два уровня расположены друг над другом с грузоподъемностью, составляющей два груза на каждом уровне. Каждый уровень содержит конвейер с приводом от двигателя и позволяет транспортировать два груза, подаваемых одним, или более выходными буферными конвейерами 20L (выходной буферной станции 18L).
Выходной многоуровневый грузоподъемник 222L также связан с выходным многоуровневым передающим устройством 34L. Это устройство способно одновременно принимать на нескольких уровнях ряд грузов, приходящих от выходного многоуровневого грузоподъемника 222L. Она также снабжено двумя расположенными друг над другом уровнями и содержит на каждом уровне конвейер 30L или 32L с приводом от двигателя. Это позволяет четырем грузам, одновременно транспортируемым выходным многоуровневым грузоподъемником 222L, задерживаться в ожидании принятия решения и делать это после того, как они выгружаются с выходного многоуровневого грузоподъемника 222L.
Чтобы выполнять передачу грузов, два уровня конвейеров 222L выходного многоуровневого грузоподъемника выравнивают с двумя уровнями конвейеров 30L и 32L выходного многоуровневого передающего устройства 34L и набор грузов передают от выходного многоуровневого грузоподъемника 222L к выходному многоуровневому передающему устройству 34L, когда выходной многоуровневый грузоподъемник 222L остановлен.
Выходное устройство 40L задания последовательности способно передавать грузы между выходным многоуровневым передающим устройством 34L (и, следовательно, конвейерами 30L и 32L) и выходными промежуточными конвейерами 70L и 80L. Выходное устройство 40L задания последовательности является подъемным столом с устройством типа платформы или любым другим эквивалентным устройством, которое позволяет вертикально перемещать груз. В этом примере выходное устройство 40L задания последовательности содержит один уровень (то есть, одну платформу), который снабжен участком конвейера с приводом от двигателя, позволяющим горизонтально перемещать груз.
Два выходных промежуточных конвейера 70L и 80L расположены друг над другом и позволяют разгружать грузы по двум местам назначения (не показаны) (например, с одной стороны, станция подготовки заказов и, с другой стороны, другой проход многоуровневых стеллажей).
Согласно одному частному варианту осуществления обеспечено одинаковое расстояние между двумя последовательными уровнями 30L и 32L выходного многоуровневого передающего устройства 34L и между уровнями двух выходных промежуточных конвейеров 70L и 80L. Уровни выходного многоуровневого передающего устройства 34L выровнены по вертикали с уровнями двух выходных промежуточных конвейеров 70L и 80L. Таким образом, конвейеры 30L и 80L расположены один перед другим и таким же образом расположены конвейеры 32L и 70L.
Согласно одному из вариантов расстояние между двумя выходными промежуточными конвейерами 70L и 80L отличается от расстояния между двумя последовательными уровнями 32L и 30L выходного многоуровневого передающего устройства 34L.
Для выхода грузов (способ выдачи) работа системы осуществляется следующим образом: система 950 управления управляет циклом 50L сбора, чтобы собрать N грузов (с N≤4 в представленном примере), доступных на разных уровнях (то есть, на различных выходных буферных конвейерах 30L) выходной буферной станции 18L, так что выходной многоуровневый грузоподъемник 222L собирает все N грузов в одном цикле (то есть, в одном цикле подъема/спуска выходного многоуровневого грузоподъемника 222L). Он делает это таким образом, что размещение каждого груза на грузоподъемнике 22L (с точки зрения уровня и ячейки на уровне) позволяет, когда набор из N грузов передается к выходному многоуровневому передающему устройству 34L (то есть, на конвейеры 30L и 32L), получить посредством выходного устройства 40L задания последовательности оптимальное восстановление последовательности (порядка), требующегося на выходных промежуточных конвейерах 70L и 80L.
Другими словами, и как показано на фиг. 6, система 950 управления выполнена с возможностью управления следующими этапами:
• этап 61: передача грузов от выходных буферных конвейеров 20L к выходному грузоподъемнику 222L, обеспечивающая возможность выбора группы из N грузов при каждом повторении цикла подъема/спуска выходного грузоподъемника (где N ≤ 4 в представленном примере). Для каждой группы из N грузов установление последовательности грузов, размещенных на каждом уровне выходного грузоподъемника, совместимо с ограничением, определенным далее (ограничение по порядку отправки N грузов);
• этап 62: передача каждой группы из N грузов одновременно на двух уровнях от выходного грузоподъемника 222L к выходному многоуровневому передающему устройству 34L; и
• этап 63: передача через выходное устройство 40L задания последовательности от выходного многоуровневого передающего устройства 34L по меньшей мере к одному из выходных промежуточных конвейеров 70L и 80L каждой группы из N грузов при ограничении порядка отправки N грузов на этом промежуточном конвейере или конвейерах 70L и 80L.
Если система управляет несколькими потоками грузов на выходе, то систему управления выполняют с возможностью управления через выходное устройство 40L задания последовательности передачей к каждому из двух промежуточных конвейеров 70L и 80L связанных с ними потоков грузов.
Таким образом, в примере, предложенном на фиг. 2А, чтобы собрать грузы 1, 2, 3 и 4 на разных выходных буферных конвейерах 20L разных уровней выходной буферной станции 18L и сделать их доступными на выходном промежуточном конвейере 70L в требуемой последовательности, соответствующей заказам «1, 2, 3 и 4», система 950 управления будет:
• управлять циклом 50L сбора в направлении по часовой стрелке, чтобы забрать груз 1 и поместить его на первый уровень грузоподъемника 222L в правом положении и затем забрать груз 3 и поместить его во втором уровне грузоподъемника в правом положении, затем забрать груз 2 и поместить его на первом уровне грузоподъемника в левом положении и, наконец, забрать груз 4 и поместить его на втором уровне грузоподъемника в левом положении;
• управлять передачей набора грузов грузоподъемника 222L к передающему устройству 34L (содержащему конвейеры 30L и 32L);
• управлять последовательной передачей через устройство 40L задания последовательности первыми двумя контейнерами, а именно, контейнерами 1 и 2, от конвейера 32L к выходному промежуточному конвейеру 70L и затем последовательной передачей через устройство 40L задания последовательности двумя последними контейнерами, а именно, контейнерами 3 и 4, от конвейера 32L к выходному промежуточному конвейеру 70L.
Со ссылкой на фиг. 2В и 2С представлен подробный вид правой части.
В этом примере входной многоуровневый грузоподъемник 222R является «грузоподъемником на четыре груза»: два уровня расположены друг над другом с грузоподъемностью, составляющей два груза на каждом уровне. Каждый уровень содержит конвейер с приводом от двигателя и позволяет транспортировать два груза, подаваемых одним или более входными буферными конвейерами 20R (входной буферной станции 18R).
Входной многоуровневый грузоподъемник 222R также связан с выходным многоуровневым передающим устройством 34R. Входной многоуровневый грузоподъемник 222R способен одновременно принимать на нескольких уровнях ряд грузов, поступающих от входного многоуровневого грузоподъемника 34R. Это устройство также снабжено двумя расположенными друг над другом уровнями и содержит на каждом уровне конвейер 30R или 32R с приводом от двигателя. Он позволяет четырем грузам, транспортируемым одновременно входным многоуровневым грузоподъемником 222R, приостанавливаться, делая это перед тем, как они будут выгружены с входного многоуровневого грузоподъемника 222R.
Чтобы выполнить передачу грузов, два входных уровня конвейера 222R входного многоуровневого грузоподъемника выравнивают с двумя уровнями конвейеров 30R и 32R входного многоуровневого передающего устройства 34R и набор грузов передают от входного многоуровневого передающего устройства 34R к входному многоуровневому передающему устройству 222R, когда входной многоуровневый грузоподъемник 222R остановлен.
Входное устройство 40R задания последовательности способно передавать грузы от входных промежуточных конвейеров 70R и 80R к входному многоуровневому передающему устройству 34R (и поэтому к конвейерам 30R и 32R). Выходное устройство 40L задания последовательности является подъемным столом с устройством типа платформы или любым другим эквивалентным устройством, позволяющим вертикальное перемещение груза. В этом примере входное устройство 40R задания последовательности содержит один уровень (то есть, одну платформу), который снабжен участком конвейера с приводом от двигателя, позволяющим горизонтально перемещать груз.
Два входных промежуточных конвейера 70R и 80R расположены один над другим и позволяют прибывать грузам, приходящим от двух источников (не показаны) (например, с одной стороны, от станции повторной закупки и, с другой стороны, от другого прохода многоуровневых стеллажей).
Согласно одному частному варианту осуществления обеспечено одинаковое расстояние между двумя последовательными уровнями 30R и 32R входного многоуровневого передающего устройства 34R и между уровнями двух входных промежуточных конвейеров 70R и 80R. Уровни входного многоуровневого передающего устройства 34R выровнены по вертикали с уровнями двух входных промежуточных конвейеров 70R и 80R. Таким образом, конвейеры 30R и 80R расположены так, чтобы быть обращенными друг к другу, точно так же, как конвейеры 32R и 70R.
Согласно одному варианту расстояние между двумя входными промежуточными конвейерами 70R и 80R отличается от расстояния между двумя последовательными уровнями 32R и 30R входного многоуровневого передающего устройства 34R.
Для ввода грузов (способ складирования), работа системы осуществляется следующим образом: система 950 управления управляет циклом передачи для передачи через входное устройство 40R задания последовательности N грузов (с N ≤ 4 в представленном примере) от входных промежуточных конвейеров 70R и 80R на вход многоуровневого передающего устройства 34R (то есть, на конвейеры 30R и 32R). Система управления делает это таким образом, что когда эти N грузов переданы от входного многоуровневого передающего устройства 34R на входной многоуровневый грузоподъемник 222R, размещение N грузов позволяет для этого входного многоуровневого грузоподъемника 222R расположить каждый из грузов N на одном из входных буферных конвейеров 20R входной буферной станции 18R в едином цикле (то есть, в одном цикле подъема/спуска входного многоуровневого грузоподъемника 222R).
Другими словами и как показано на фиг. 7, система 950 управления выполнена с возможностью управления следующими этапами:
• этап 71: передача грузов через входное устройство 40R задания последовательности, по меньшей мере, от одного из входных промежуточных конвейеров 70R и 80R к входному многоуровневому передающему устройству 34R и формирование на входном многоуровневом передающем устройстве групп из N грузов, распределенных по нескольким уровням (где N ≤ 4 в представленном примере). Для каждой группы из N грузов установление последовательности (с помощью входного устройства 40R задания последовательности) грузов, размещенных на каждом уровне входного многоуровневого передающего устройства 34R совместимо с ограничением, определенным далее (ограничением размещения N грузов на входных буферных конвейерах 20R);
• этап 72: передача одновременно на нескольких уровнях от входного многоуровневого передающего устройства 34R на входной грузоподъемник 222R каждой группы из N грузов;
• этап 73: передача каждой группы из N грузов от входного грузоподъемника 222R к входным буферным конвейерам 20R входной буферной станции 18R при ограничении размещения N грузов при каждом повторении цикла подъема/спуска входного грузоподъемника.
Если система управляет несколькими потоками грузов на входе (каждый из которых связан и принимается на одном из входных промежуточных конвейеров 70R и 80R), систему управления выполняют с возможностью управления передачей через входное устройство 40R задания последовательности от каждого из двух входных промежуточных конвейеров 70R и 80R грузов, принадлежащих их соответствующему потоку грузов.
Таким образом, в примере, предложенном на фиг. 2В, чтобы забрать грузы a, b, c и d на входном промежуточном конвейере 70R и поместить их на различных входных буферных конвейерах 20R разных уровней входной буферной станции 18R, система управления 950 должна:
• управлять циклом передачи через входное устройство 40R задания последовательности, чтобы забрать груз а и поместить его на первом уровне (конвейер 32R) входного многоуровневого передающего устройства 34R в левом положении и забрать груз b и поместить его на первом уровне (конвейер 32R) входного многоуровневого передающего устройства 34R в правом положении, забрать груз с и поместить его на втором уровне (конвейер 30R) входного многоуровневого передающего устройства 34R в левом положении и, наконец, забрать груз d и поместить его на втором уровне (конвейер 30R) входного многоуровневого передающего устройства 34R в правом положении;
• управлять передачей набора грузов от входного многоуровневого передающего устройства 34R (содержащего конвейеры 30R и 32R) к грузоподъемнику 222R;
• управлять циклом 50R размещения по часовой стрелке, чтобы разместить грузы на входных буферных конвейерах 20R в местной входной буферной станции 18R.
Согласно одному частному варианту осуществления, показанному на фиг. 2А, может быть установлен промежуточный стеллаж 60L, так чтобы он был обращен к выходной буферной станции 18L на всей или на части высоты стеллажа 18L (выше выходного многоуровневого передающего устройства 34L в примере, показанном на фиг. 2А), и это выполнено так, чтобы выходной грузоподъемник 222L, помещенный между выходной буферной станцией 18L и этим промежуточным стеллажом 60L, также был способен осуществлять входные и выходные перемещения грузов на этом промежуточном стеллаже. Этот промежуточный стеллаж содержит один или более дополнительных буферных конвейеров. Они могут быть использованы в качестве буфера, чтобы по мере необходимости регулировать поток грузов на выходе.
Аналогично, как показано на фиг. 2В, промежуточный стеллаж 60R может быть расположен так, чтобы быть обращенным к входной буферной станции 18R на всей или на части высоты стеллажа 18R (над входным многоуровневым передающим устройством 34R в примере, показанном на фиг. 2В), и это выполнено так, чтобы входной грузоподъемник 222R, помещенный между входной буферной станцией 18R и этим набором промежуточных стеллажей 60R, был также способен осуществлять перемещения по входу и выходу грузов на этом промежуточном стеллаже.
На фиг. 3 (вид сбоку с левой стороны) показана автоматизированная транспортно-складская система согласно второму варианту осуществления изобретения, в которой выходное многоуровневое передающее устройство (обозначенное как 34L' и содержащее конвейеры 30L и 32L) действует как выходное устройство задания последовательности, то есть, заменяет собой выходное устройство задания последовательности, обозначенное как 40L на фиг. 2А.
Чтобы выполнить эту дополнительную функцию, выходное многоуровневое передающее устройство 34L' снабжено средством грузоподъемника альтернативного типа с платформой или любым другим эквивалентным средством, позволяющим вертикальное перемещение грузов между двумя или более уровнями.
Чтобы выгрузить грузы в соответствии с последовательностью «1, 2, 3 и 4», конвейер 32L выравнивают по горизонтали с выходным промежуточным конвейером 70L. Когда контейнеры 1 и 2 выгружены, выходное многоуровневое передающее устройство 34L' осуществляет смещение по вертикали, так что конвейер 30L становится горизонтально выровненным с выходным промежуточным конвейером 70L. Контейнеры 3 и 4 затем выгружают после контейнеров 1 и 2 на выходной промежуточный конвейер 70L, соблюдая, таким образом, последовательность.
Аналогично, входное многоуровневое передающее устройство 34R (содержащее конвейеры 30R и 32R) может быть изменено, чтобы действовать как входное устройство задания последовательности, то есть, заменять собой входное устройство задания последовательности, указанное на фиг. 2В ссылочным обозначением 40R.
На фиг. 4 (вид сбоку левой части) показана автоматизированная транспортно-складская система согласно третьему варианту осуществления изобретения.
Система содержит второй набор стеллажей Е2 (того же типа, что и первый Е1), включающий в себя два многоуровневых стеллажа (только один упомянутый стеллаж 112L виден на фиг. 4), выходную и входную буферные станции (на фиг. 4 можно видеть только выходную буферную станцию 118L).
Выходная буферная станция 118L расположена на одном конце стеллажа 112L и примыкает к нему. Она образована набором выходных буферных конвейеров 120L. Количество выходных буферных конвейеров 120L является таким же, как количество уровней в стеллаже 112L.
Выходной многоуровневый грузоподъемник 222L расположен между выходными буферными станциями 18L и 118L для передачи грузов между этими буферными станциями и выходными промежуточными конвейерами 70L и 80L через выходное многоуровневое передающее устройство 34L и выходное устройство 40L задания последовательности.
Согласно третьему варианту осуществления во время того же самого цикла 50L сбора выходной многоуровневый грузоподъемник 222L может собирать грузы с двух выходных буферных станций 18L и 118L, чтобы предварительно составить требуемую последовательность. Таким образом, в примере, предложенном на фиг. 4, выходной многоуровневый грузоподъемник 222L собирает грузы 1, 2 и 4 на выходных буферных конвейерах 20L выходной буферной станции 18L и груз 3 с одного из выходных буферных конвейеров 120L выходной буферной станции 118L. Сборка осуществляется в следующем порядке: 1, 2, 3 и 4.
Таким же образом (не показано), входной многоуровневый грузоподъемник 222R может располагать грузы на двух входных буферных станциях этих двух блоков хранения.
Согласно другому частному варианту осуществления могут быть использованы конвейеры, содержащиеся в устройствах левой части системы (то есть, см. фиг. 2А, выходные буферные конвейеры 20L, конвейеры разных уровней выходного многоуровневого грузоподъемника 222L, конвейеры разных уровней выходного многоуровневого передающего устройства 34L (в том числе, конвейеры 30L и 32L) и конвейер единого уровня выходного устройства 40L задания последовательности):
• либо, в одном случае, обеспечивая возможность работы левой части выходной системы при выходе грузов, как дополнительно описано выше со ссылкой на фиг. 2А;
• либо, в другом случае, обеспечивая возможность работы левой части системы при входе грузов (работая идентично дополнительно описанному выше для правой части системы со ссылкой на фиг. 2В). Этот режим позволяет преодолеть нарушение функционирования правой части системы (см., например, входной грузоподъемник).
Точно также могут быть использованы конвейеры, содержащиеся в устройствах правой части системы (то есть, см. фиг. 2В, входные буферные конвейеры 20R, конвейеры разных уровней входного многоуровневого грузоподъемника 222R, конвейеры разных уровней входного многоуровневого передающего устройства 34R (в том числе, конвейеры 30R и 32R) и конвейер единого уровня входного устройства 40R задания последовательности):
• либо, в одном случае, обеспечивая возможность работы правой части системы при входе грузов, как дополнительно описано выше со ссылкой на фиг. 2В;
• либо, в другом случае, обеспечивая возможность работы правой части системы при выходе грузов (работая идентично дополнительно описанному выше для левой части системы со ссылкой на фиг. 2А). Этот режим позволяет преодолеть нарушение функционирования левой части системы (смотрите, например, выходной грузоподъемник).
На фиг. 5 показана упрощенная структура системы 950 управления согласно частному варианту осуществления изобретения, реализующая способ выдачи и/или способ складирования, дополнительно описанные выше со ссылкой на фиг. 2А, 2В, 2С, 3, 4, 6 и 7.
Система 950 управления может содержать оперативное запоминающее устройство 93 (например, ОЗУ), процессорный блок 91, снабженный, например, процессором и приводимый в действие компьютерной программой, хранящейся в постоянном запоминающем устройстве 32 (например, ПЗУ или жесткий диск). При инициализации кодовые команды компьютерной программы, например, загружаются в оперативное запоминающее устройство 93, а затем выполняются процессором процессорного блока 91. Затем, в соответствии с командами программы, процессорный блок 91 выводит команды 94 для управления различными устройствами системы (в частности, для левой части, например, для выходных буферных конвейеров 20L, выходного многоуровневого грузоподъемника 222L, выходного многоуровневого передающего устройства 34L (в том числе, конвейеров 30L и 32L) и выходного устройства 40L задания последовательности).
На фиг. 6 показан только один из нескольких других возможных путей выполнения упомянутых выше способов (см. фиг. 6 и 7). Конечно, способ согласно изобретению может одинаково хорошо быть осуществлен следующим образом:
• на перепрограммируемой компьютерной машине (персональный компьютер, процессор DSP или микроконтроллер), выполняющей программу, содержащую последовательность команд, или
• на специализированной компьютерной машине (например, набор логических элементов, таких как FPGA или ASIC или любой другой аппаратный модуль).
Если изобретение осуществляют с использованием перепрограммируемой компьютерной машины, то соответствующая программа (то есть, последовательность команд) может быть сохранена на носителе для хранения данных, являющемся съемным (таким как, например, дискета, CD-ROM или ROM DVD) или несъемным, причем этот носитель является частично или полностью считываемым компьютером или процессором.
Реферат
Группа изобретений относится к автоматизированной транспортно-складской системе. Система включает в себя: систему управления, минимум один блок хранения, минимум один промежуточный конвейер, многоуровневый грузоподъемник, многоуровневое передающее устройство, устройство задания последовательности. Система управления служит для управления элементами передачи множества грузов. Многоуровневое передающее устройство может заменять устройство задания последовательности. Блок хранения содержит несколько уровней, с которых множество грузов может быть выгружено или на которые множество грузов может быть помещено. Промежуточный конвейер служит для выхода и входа множества грузов из системы или в систему. Многоуровневый грузоподъемник содержит минимум два вертикально перемещаемых уровня. Уровни грузоподъемника расположены друг над другом. Грузоподъемник обеспечивает прием и отдачу множества грузов из блока или в блок хранения. Передающее устройство содержит уровни, расположенные друг над другом, и служит для приема и отдачи множества грузов с уровней грузоподъемника, когда уровни грузоподъемника выровнены с уровнями передающего устройства. Передающее устройство выполняет буферную функцию, позволяющую множеству грузов приостанавливаться перед перемещением на грузоподъемник, а также приостанавливаться после того, как грузы выгружены выходным грузоподъемником. Устройство задания последовательности снабжено средством вертикального перемещения и позволяет передавать в определенном порядке множество грузов между передающим устройством и промежуточным конвейером. Многоуровневое передающее устройство может заменять устройство задания последовательности. Достигается увеличение пропускной способности автоматизированной транспортно-складской системы. 4 н. и 10 з.п. ф-лы, 7 ил.
Комментарии