Поворотный навесной брус с цилиндром с двухсторонним штоком - RU2749915C2
Код документа: RU2749915C2
Чертежи
Описание
Область техники
Изобретение в целом относится к инструментам, в частности, к сельскохозяйственным инструментам.
Предшествующий уровень техники
В инструментах, в частности, в сельскохозяйственных инструментах, используемых совместно с навесными землеобрабатывающими приспособлениями, обычно применяется множество гидравлических систем для управления операциями на поле и отдельный набор гидравлических систем для операций транспортировки. Например, один набор гидравлических систем используется для опускания навесного землеобрабатывающего приспособления (например, высевающих секций для посева и/или перемешивания почвы) к земле, и другой набор гидросистем используется для поднятия инструмента, навесных приспособлений и колес на поворотной полосе, а также для складывания инструмента для уменьшения габаритов при передвижении по дороге. При увеличении размеров инструмента обеспечение вышеупомянутых основных функций приводит к повышению затрат и/или увеличению веса.
Раскрытие изобретения
В одном из возможных вариантов осуществления, инструмент содержит центральную секцию и пару боковых секций, причем каждая секция содержит пару параллельных рамных элементов, шарнирно соединенных друг с другом, причем один из рамных элементов представляет собой навесной брус; и множество гидроцилиндров, обеспечивающих поворотное движение между параллельными рамными элементами, причем гидроцилиндры боковых секций представляют собой цилиндры с двухсторонним штоком, а гидроцилиндры центральной секции представляют собой цилиндры с односторонним штоком.
Раскрыты определенные варианты выполнения системы с поворотным навесным брусом и соответствующего устройства и способа, которые обеспечивают возможность позиционирования инструмента в нескольких рабочих положениях с помощью уменьшенного количества гидравлических систем. В одном из возможных вариантов осуществления изобретения в раскрываемой системе с поворотным навесным брусом используются гидроцилиндры с двухсторонним штоком, двумя или более полостями для осуществления перемещений инструмента, необходимых как для работы на поле, так и во время операций транспортировки по дороге. В одном из возможных вариантов осуществления, система c поворотным навесным брусом включает в себя инструмент, содержащий центральную секцию и пару боковых секций, причем боковые секции могут складываться относительно центральной секции. Каждая из отдельных секций состоит из параллельных рамных элементов, которые при разворачивании для работы в поле устанавливаются один за другим перпендикулярно направлению движения по полю, поддерживаемые множеством колес. Каждый из задних рамных элементов пары каждой секции содержит навесной брус, к которому прицепляется множество почвообрабатывающих инструментов (например, высевающие секции). Навесные брусья каждой секции могут шарнирно поворачиваться относительно переднего рамного элемента; боковые секции с помощью цилиндров с двухсторонним штоком могут поворачиваться и устанавливаться в множество рабочих положений, а центральная секция с помощью цилиндров с односторонним штоком может поворачиваться и устанавливаться в подмножество указанного множества рабочих положений.
Необходимо отметить, что в большинстве конструкций инструментов (например, в сеялках) используются колесные модульные системы для поднятия всей рамы сеялки при работе в поле и для уменьшения габаритов при транспортировке по дорогам, что требует большей мощности и обуславливает больший вес конструкции. Эта обычная система используется в дополнение к отдельной гидравлической системе, применяемой для поднятия навесных брусьев с прикрепленными к ним высевающими секциями (например, для обработки почвы). Благодаря применению цилиндров с двухсторонним штоком на боковых секциях можно использовать менее мощные цилиндры, поскольку гидравлическая система инструмента при этом осуществляет подъем не всей рамы с колесами со всеми закрепленными на ней инструментами, а только навесных брусьев и прицепленных к ним высевающих секций. Иными словами, один (нижний) конец штока каждого цилиндра с двухсторонним штоком на боковых секциях используется для поднимания навесного бруса при выполнении поворотов на незапаханном конце поля, и другой (верхний) конец штока каждого цилиндра с двухсторонним штоком используется для полного поднимания навесного бруса для осуществления операций транспортировки по автомобильным дорогам.
Краткое описание чертежей
Многие аспекты системы с поворотным навесным брусом согласно изобретению можно лучше понять при рассмотрении чертежей. Представленные на этих чертежах компоненты не обязательно изображены в масштабе; вместо этого основное внимание уделяется четкому пояснению принципов работы системы с поворотным навесным брусом. Кроме того, на чертежах одинаковыми ссылочными позициями обозначены одинаковые или аналогичные детали.
На фиг. 1 показана система с поворотным навесным брусом согласно примеру варианта осуществления, схематичный вид;
на фиг. 2A-2C – система с поворотным навесным брусом согласно примеру варианта осуществления в нескольких рабочих положениях при использовании сложенной конфигурации, схематичные виды сбоку;
на фиг. 3A-3C – система с поворотным навесным брусом согласно примеру варианта осуществления в нескольких рабочих положениях при использовании части навесного приспособления с одним орудием, схематичные виды;
на фиг. 4A-4B – пример гидравлической системы, используемой для приведения в действие гидроцилиндров системы с поворотным навесным брусом согласно примеру варианта осуществления, схематичные виды.
на фиг. 5A – блок-схема, поясняющая пример системы управления системы с поворотным навесным брусом согласно примеру варианта осуществления;
на фиг. 5B – блок-схема, поясняющая пример блока управления системы с поворотным навесным брусом, показанной на фиг. 5A;
на фиг. 6 – блок-схема последовательности действий, поясняющая способ использования поворотного навесного бруса согласно варианту осуществления.
Варианты осуществления изобретения
После краткого описания различных особенностей системы с поворотным навесным брусом согласно вариантам осуществления изобретения, далее приведено подробное описание системы c поворотным навесным брусом со ссылками на чертежи. Несмотря на то, что подробное описание осуществлено со ссылками на вышеуказанные чертежи, эти чертежи ни в коей мере не являются ограничивающими, т.е. объем изобретения не ограничивается вариантами выполнения, представленными на чертежах. Например, хотя в описании рассматриваются прицепные инструменты, в некоторых вариантах осуществления могут использоваться инструменты, встроенные в самоходную машину. Далее, хотя в описании рассматриваются или описываются конкретные особенности одного или нескольких вариантов осуществления изобретения, такие конкретные особенности не обязательно являются частью каждого возможного варианта осуществления, равно как и все указанные преимущества, обеспечиваемые каким-либо одним вариантом выполнения. Напротив, цель описания заключается в раскрытии всех возможных вариантов, модификаций и эквивалентных конструкторских решений, охватываемых сущностью и объемом изобретения, т.е. системы с поворотным навесным брусом, определяемых пунктами формулы изобретения. Кроме того, в контексте изобретения следует отметить, что формула изобретения не обязательно ограничивается описанными конкретными вариантами осуществления.
Следует отметить, что используемые в описании понятия, указывающие направление, такие как «передний», «задний», «левый» и «правый», определяются при взгляде вперед от задней части инструмента.
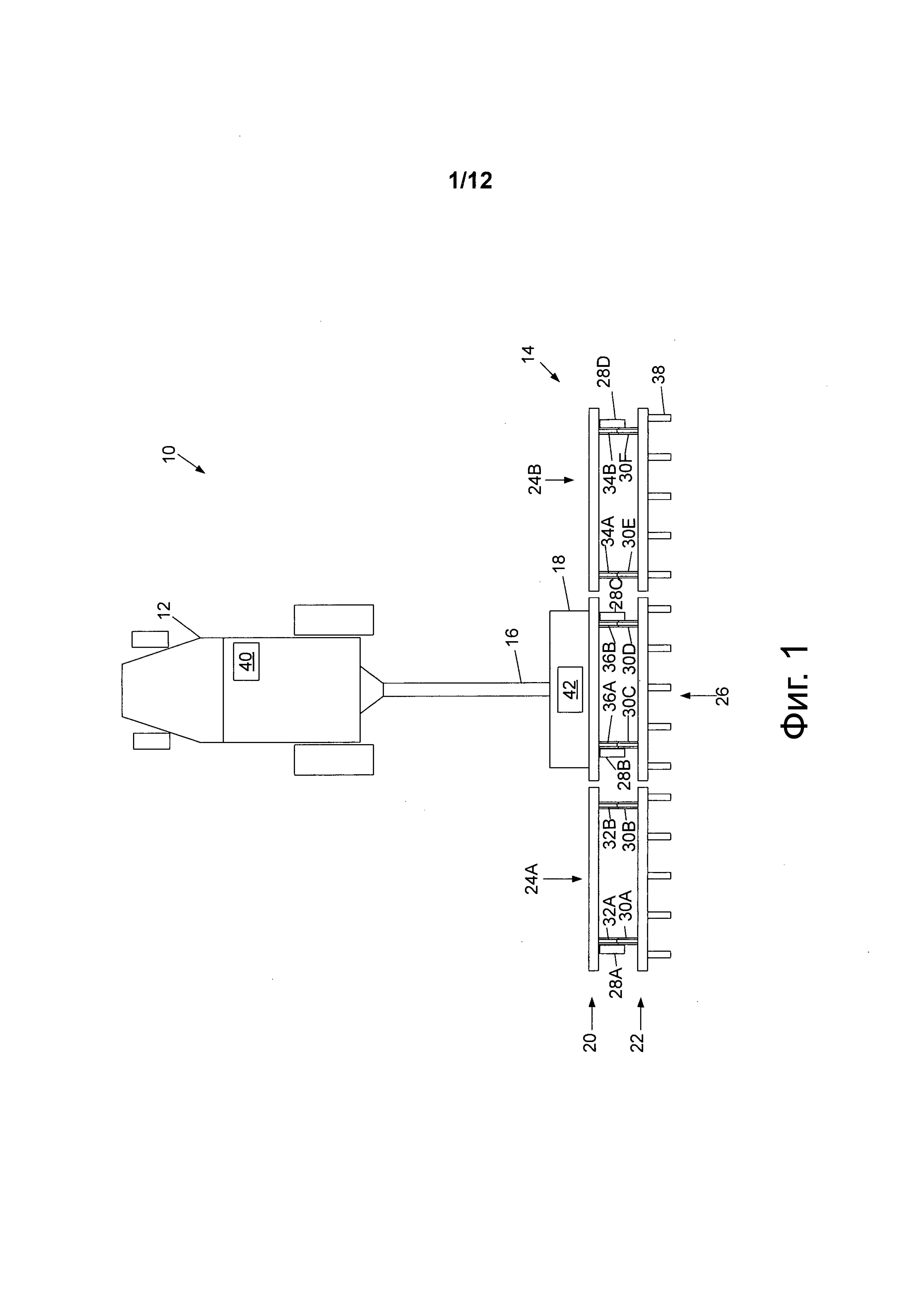
На фиг. 1 схематично показан пример оборудования 10, в котором может быть использована система с поворотным навесным брусом согласно варианту осуществления изобретения. Специалисту в данной области будет ясно, что в контексте изобретения оборудование 10, показанное на фиг. 1, является исключительно поясняющим, и что в некоторых вариантах осуществления может быть использовано и другое оборудование. Показанное в качестве примера оборудование 10 включает в себя тягач 12 (в данном примере, трактор), который тянет за собой инструмент 14. Трактор 12 и инструмент 14 показаны частично. В некоторых вариантах осуществления могут быть использованы тягачи других типов, в том числе, самоходные машины с встроенным инструментом (взамен прицепного инструмента), или тягачи с осями или шасси других конструкций; эти варианты также охватываются объемом изобретения. Трактор 12 соединен с инструментом 14 посредством любого известного сцепного узла 16 и/или узла 16 дышла. Инструмент 14 может выполнять функцию опоры приспособления 18, которое может включать в себя один или несколько продуктовых контейнеров, компоненты управления, насосы, емкости и другие приспособления, используемые для распределения продукта и управления работой инструмента и/или его навесных приспособлений. Инструмент 14 содержит шасси, которое включает в себя параллельные рамные элементы 20, 22, расположенные один перед другим, соответственно, при развертывании (т.е. когда инструмент тянут в направлении вперед). В рассматриваемом примере инструмент 14 расположен в направлении, перпендикулярном направлению перемещения по полю. Инструмент 14 содержит боковые секции 24 (например, 24A, 24B) и центральную секцию 26, на которой установлено приспособление 18, и которая перемещается непосредственно за трактором 12. В некоторых вариантах осуществления, трактор 12 может тянуть инструмент 14 в положении, в котором центральная секция 26 физически смещена относительно центра трактора 12. Хотя это и не показано на фиг. 1, каждая из боковых секций 24 шарнирно соединена с центральной секцией 26, чем обеспечивается возможность их складывания в плоскость, занимаемую трактором 12 и инструментом 14, с целью уменьшения габаритов при операциях транспортировки. В некоторых вариантах осуществления складывание боковых секций 24 может осуществляться вне плоскости, занимаемой трактором 12 и инструментом 14, например, они могут складываться выше и сзади этой плоскости). К рамным элементам 20 боковых секций 24A, 24B и центральной секции 26 прикреплены соответствующие колеса 28 (например, колесо 28A – к рамному элементу 20 боковой секции 24A, колеса 28B-28C – к рамному элементу 20 центральной секции 26 и колесо – 28D к рамному элементу 20 боковой секции 24B). В некоторых вариантах осуществления системы c поворотным навесным брусом могут использоваться дополнительные колеса (расположенные, например, одно за другим, или каким-либо иным образом) в тех же самых или других положениях, или колеса могут быть расположены в других положениях по сравнению с показанными. Колеса 28 расположены между рамными элементами 20, 22. Каждый рамный элемент 22 содержит поперечные плечи 30 (например, 30A-30F), отходящие вперед и шарнирно соединенные (например, с помощью шарнирного соединения) с отходящими назад поперечными плечами (поперечными плечами 48, как лучше всего показано на фиг. 2A) рамного элемента 20.
К рамному элементу 20 в месте расположения поперечных плеч, отходящих назад от рамного элемента 20, и к поперечным плечам 30A, 30B боковой секции 24A прикреплены гидроцилиндры 32 с двухсторонним штоком (например, гидроцилиндры 32A, 32B), а к поперечным плечам 30E, 30F боковой секции 24B (и к рамному элементу 20) прикреплены гидроцилиндры 34 с двухсторонним штоком (например, гидроцилиндры 34A, 34B). К поперечным плечам 30C, 30D центральной секции 26 (и к рамному элементу 20) прикреплены гидроцилиндры 36 с односторонним штоком (например, гидроцилиндры 36A, 36B). Следует отметить, что расположение и/или количество поперечных плеч 30 и/или гидроцилиндров 32, 34, 36, показанных на фиг. 1, является чисто пояснительным для одного конкретного варианта осуществления, и что в некоторых вариантах осуществления могут быть использованы иные и/или дополнительные количества и/или места расположения. Гидроцилиндры 32, 34 с двухсторонним штоком предназначены для поворота рамных элементов 22 боковых секций 24 к рабочим положениям или из рабочих положений с углом 0°, промежуточного углового положения, и положения с углом приблизительно 90° относительно горизонтальной плоскости рамных элементов 20. В одном из возможных вариантов осуществления, промежуточное угловое положение является рабочим положением с углом наклона приблизительно 30° (например, 28-30°). В одном из возможных вариантов осуществления, угол наклона при промежуточном угловом положении составляет приблизительно 20°. В одном из возможных вариантов осуществления, угол наклона в промежуточном угловом положении составляет приблизительно 40° (например, 38-40°). В одном из возможных вариантов осуществления, диапазон изменения угла наклона промежуточного углового положения составляет приблизительно 20-40°. Гидроцилиндры 36 с односторонним штоком гидравлически соединены с гидроцилиндрами 32, 34, с двухсторонним штоком и предназначены для поворота рамного элемента 22 центральной секции 26 в рабочие положения, углы наклона при которых являются подмножеством значений углов наклона, создаваемых для гидроцилиндров 32, 34 с двухсторонним штоком, а именно, 0° и приблизительно 30° (например, 20-40°) относительно горизонтальной плоскости рамного элемента 20.
Следует отметить, что в одном из возможных вариантов осуществления, ход нижнего штока гидроцилиндров 32, 34 с двухсторонним штоком и цилиндров 32-36 с односторонним штоком ограничивает максимальное перемещение в промежуточное угловое положение, хотя в некоторых вариантах осуществления, могут быть использованы другие конструкции цилиндров для изменения величины перемещения. Кроме того, следует отметить, что в некоторых вариантах осуществления, величина поворота (например, на поворотной полосе поля) может быть предварительно запрограммирована (или, в некоторых вариантах осуществления, может регулироваться оператором) путем изменения в сторону нижнего края промежуточного углового положения. Например, может быть выбрано промежуточное угловое положение с углом наклона 20° с целью получения минимально допустимого клиренса. Иными словами, может быть выбрана максимальная величина хода штока для получения максимального клиренса, и эта величина может быть изначально задана производителем, или, в некоторых вариантах осуществления, может решить, что для получения допустимого клиренса достаточно величины хода меньше полной, и соответственно отрегулировать величину хода штока. Следует отметить, что понятие «рабочие положения» предназначено для обозначения угловых положений рамных элементов 22 боковых секций 24 относительно плоскости поперечной части (например, тяговой штанги) рамного элемента 20, проходящей по длине рамного элемента 20, если угловое положение сохраняется в течение определенного периода времени, достаточного для выполнения одной или нескольких функций, включающих в себя обработку почвы (например, с помощью высевающих секций, осуществляющих посев, внесение удобрений и/или перемешивание почвы), выполнение поворотов (например, на незапаханных концах поля с целью выполнения последующего прохода по обрабатываемому участку поля) и изменение конфигурации инструмента для транспортировки по автомобильным дорогам (например, уменьшение ширины инструмента). К рамным элементам 22 (за ними, а в некоторых вариантах осуществления, немного перед ними, как в конфигурации с расположением в шахматном порядке) с возможностью отсоединения прикрепляются почвообрабатывающие приспособления, включая высевающие секции, которые осуществляют посев, внесение удобрений и/или перемешивание почвы.
Трактор 12 также содержит блок 40 управления, который преобразует управляющие сигналы, поступающие от оператора или от устройства, в управляющие команды, а также выполняет функции управления для трактора 12 и/или инструмента 14. Гидравлическое управление может осуществляться посредством управляющего компонента 42, содержащего один или более клапанных коробок соответствующего одного или нескольких клапанов, управляющих состоянием гидроцилиндров 32, 34 с двухсторонним штоком и гидроцилиндров 36 с односторонним штоком (например, регулирование давления и/или расхода гидрожидкости в гидроцилиндрах). Активация управляющего компонента 42 может осуществляться посредством беспроводной связи или посредством проводных соединений (например, Isobus) в соответствии с командами, поступающими от блока 40 управления.
Следует отметить, что система c поворотным навесным брусом может содержать как все компоненты, описанные для всего оборудования 10, так и лишь некоторые из описанных компонентов.
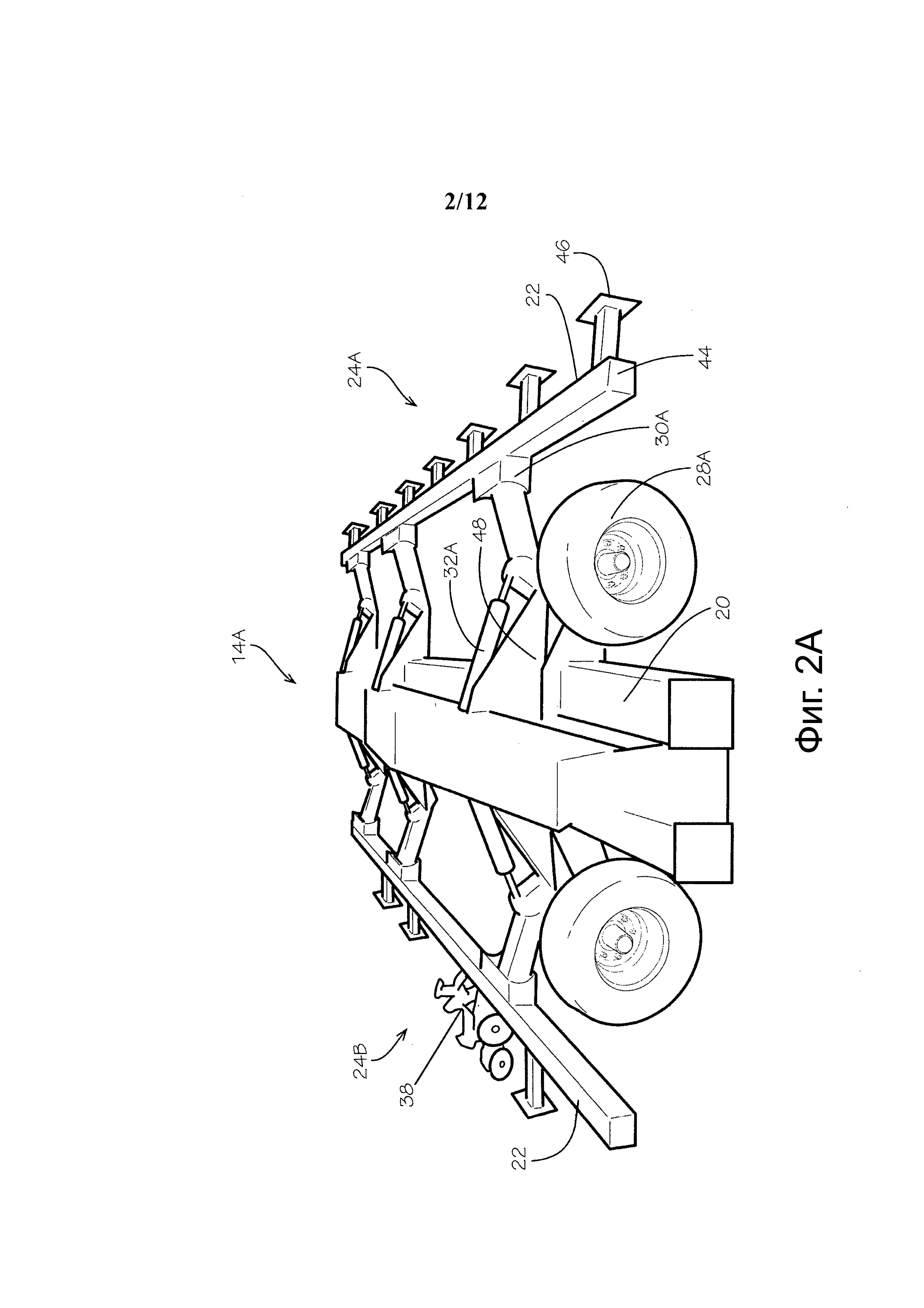
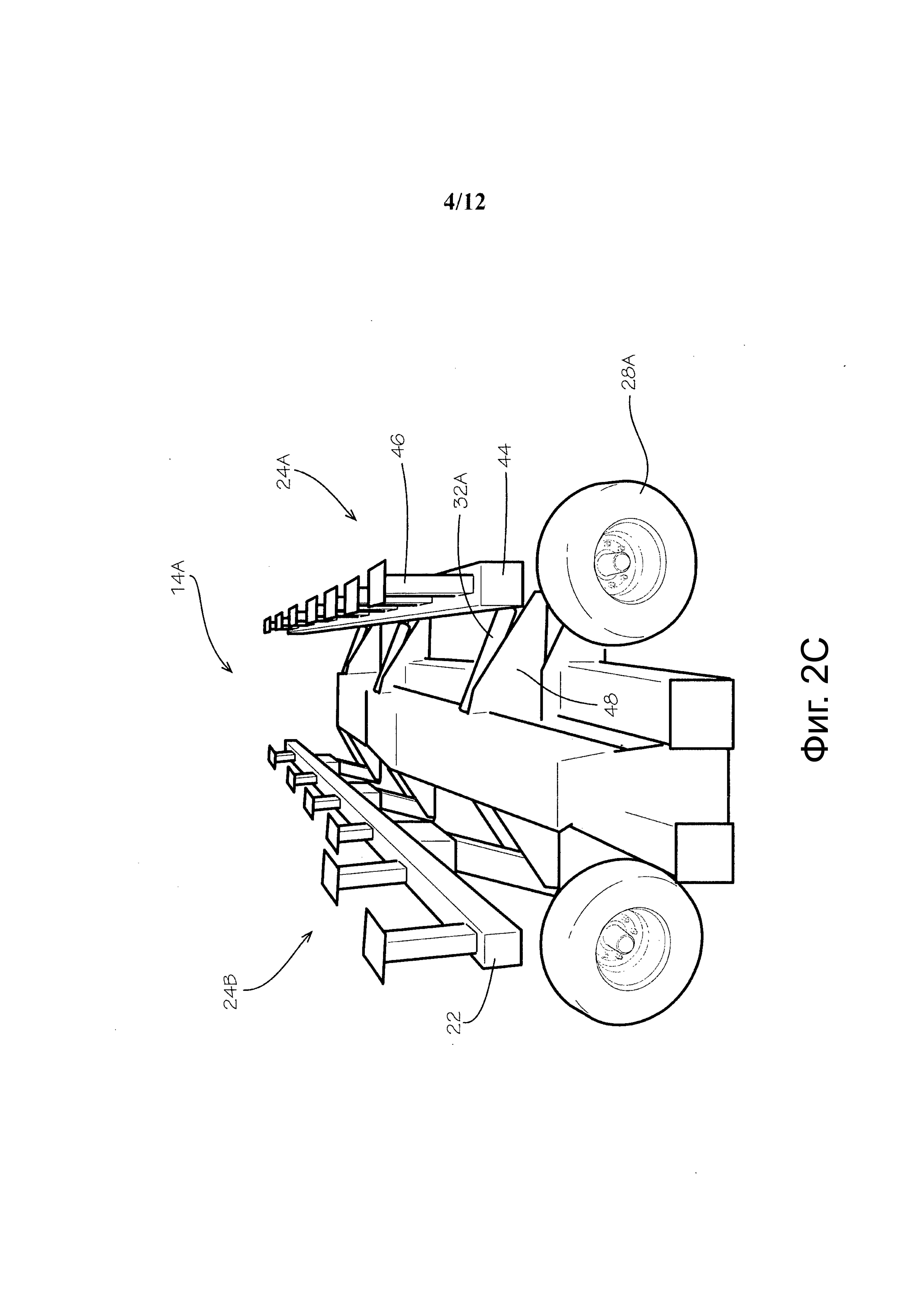
После рассмотрения в целом примера оборудования 10, в котором может быть использован вариант выполнения системы c поворотным навесным брусом, обратим свое внимание на фиг. 2A-2C, которые поясняют примеры рабочих положений боковых секций инструмента 14A варианта выполнения системы c поворотным навесным брусом. В примерах, показанных на фиг. 2A-2C, инструмент 14A (и, аналогичным образом, инструмент 14B на фиг. 3A-3C) может иметь конфигурацию, аналогичную (например, за исключением количества компонентов) конфигурации инструмента 14 на фиг. 1, в которой, как показано в рассматриваемом примере на фиг. 2A-2C, боковые секции 24A, 24B складываются вперед относительно центральной секции 26. На чертеже изображена только одна высевающая секция 38, прицепленная к рамному элементу 22, однако, следует иметь в виду, что обычно к рамным элементам 22 по их длине прикрепляются дополнительные высевающие секции. Рассмотрим боковую секцию 24A, уделяя особое внимание компонентам, связанным с гидроцилиндром 32A с двухсторонним штоком, имея в виду, что поворотные компоненты остальной части боковой секции 24A и боковой секции 24B имеют аналогичную конструкцию, но опущены для краткости; видно, что рамный элемент 22 содержит навесной брус 44. Навесной брус 44 может иметь прямоугольную форму, как в рассматриваемом примере; на задней стороне данного бруса расположены скобы 46 для приспособлений, равномерно распределенные по длине навесного бруса 44. Скобы 46 для приспособлений прикреплены к навесному брусу 44 любым известным способом, например, с помощью сварки, болтами и т.д. Скобы 46 для приспособлений обеспечивают возможность присоединения соответствующих почвообрабатывающих приспособлений, таких как высевающие секции 38, хотя в некоторых вариантах осуществления могут использоваться и другие устройства для сцепления. На противоположной стороне навесного бруса 44 расположены поперечные плечи 30, отходящие вперед от навесного бруса 44. Поперечные плечи 30 посредством шарнирных соединений присоединены к поперечным плечам 48, отходящим назад от рамного элемента 20.
Поворот рамных элементов 20, 22 обеспечивается гидроцилиндрами 32 с двухсторонним штоком (например, 32A). В одном из возможных вариантов осуществления, гидроцилиндр 32A с двухсторонним штоком (как и другие гидроцилиндры с 32 двухсторонним штоком) прикреплен к верхней части рамного элемента 20 (являясь частью или будучи близко расположен к поперечному плечу 48) и к части поперечного плеча 30 напротив навесного бруса 44. Как показано на фиг. 2A, гидроцилиндры 32 с двухсторонним штоком повернули навесной брус 44 в положение с углом 0° относительно горизонтальной плоскости поперечного компонента рамного элемента 20. В данной ориентации высевающие секции (не показаны) могут работать и осуществлять различные операции обработки почвы (например, посев, перемешивание и т.д.) Следует отметить, что навесной брус 44 центральной секции 26, хотя он и не показан, также приведен в аналогичное положение благодаря срабатыванию гидроцилиндров 36 с односторонним штоком (фиг. 1).
Как показано на фиг. 2B, гидроцилиндры 32 с двухсторонним штоком повернули навесной брус в промежуточное угловое положение (например, в положение с углом приблизительно 30-40°). Для краткости мы будем рассматривать промежуточное угловое положение с углом 30° относительно горизонтальной плоскости рамного элемента 20, имея в виду, что углы в промежуточном угловом положении могут быть и другими, в диапазоне приблизительно от 20° до 40°. В этом угловом положении нижние концы штоков гидроцилиндров 32, 34 с двухсторонним штоком полностью или почти полностью втянуты. В одном из возможных вариантов осуществления, поворот происходит одновременно с поворотом навесного бруса боковой секции 24B (и одновременно с поворотом навесного бруса центральной секции 26 с помощью гидроцилиндров 36 с односторонним штоком). В этой конфигурации высевающие секции могут быть подняты от поверхности земли на незапаханном конце поля с целью выполнения поворота инструмента для следующего прохода или для подготовки к транспортировке по дороге.
Как показано на фиг. 2C, гидроцилиндры 32 с двухсторонним штоком повернули навесной брус на угол приблизительно 90° относительно горизонтальной плоскости рамного элемента 20 за счет совместного действия, обусловленного полным втягиванием нижних концов штоков и верхних концов штоков гидроцилиндров 32, 34 с двухсторонними штоками. В одном из возможных вариантов осуществления, это поворот происходит одновременно с поворотом навесного бруса боковой секции 24B. Следует отметить, что в одном из возможных вариантов осуществления угол поворота навесного бруса центральной секции 26 при полном втягивании гидроцилиндров 36 с односторонним штоком не превышает приблизительно 30°. Как поясняется далее, управляющий компонент 42 (фиг. 1) фиксирует гидроцилиндры 36 с односторонним штоком в достигнутом положении, и позволяет гидроцилиндрам 32, 34 с двухсторонним штоком задействовать дополнительный (верхний) конец штока, чтобы обеспечить дальнейший поворот на угол приблизительно 90°.
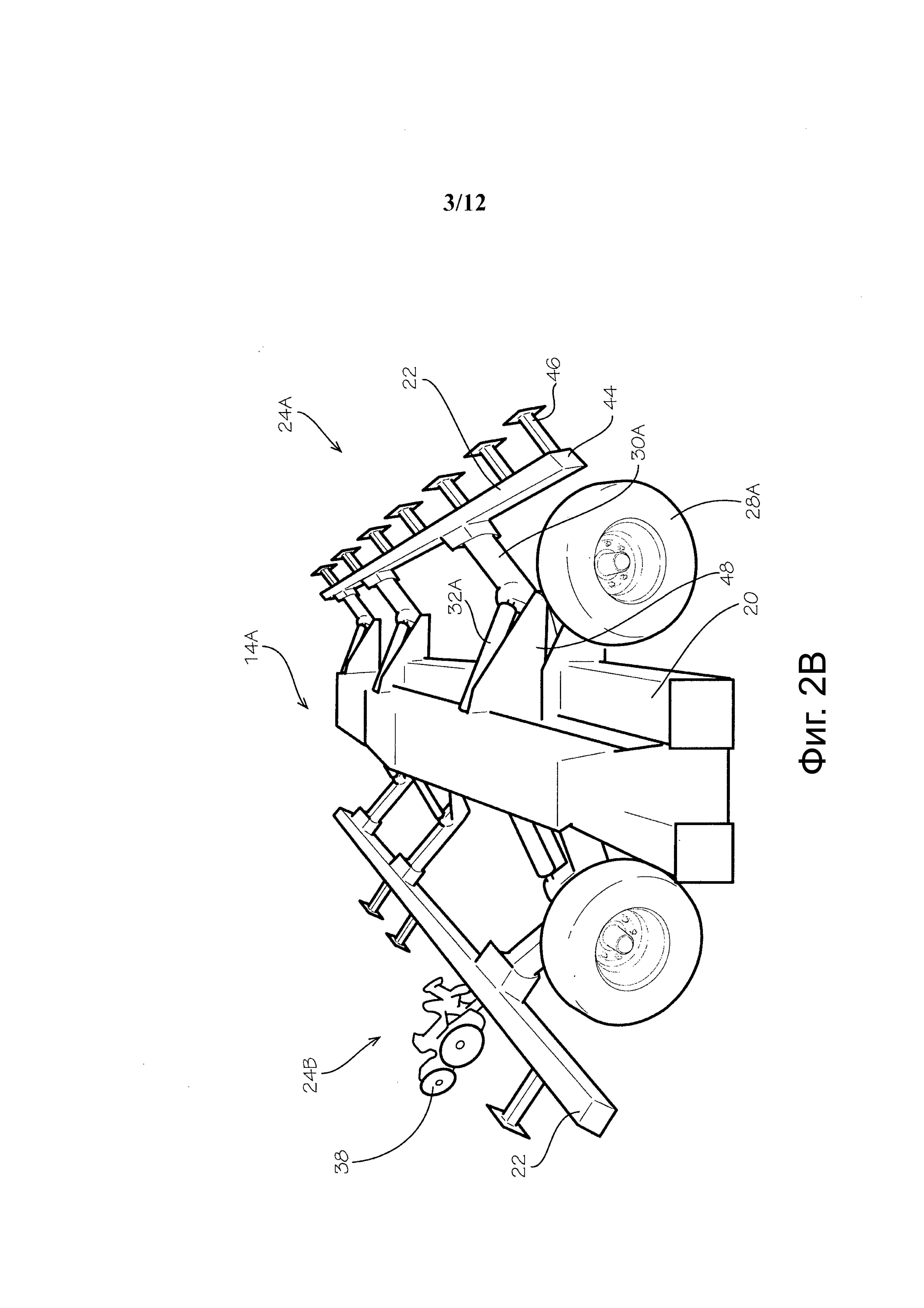
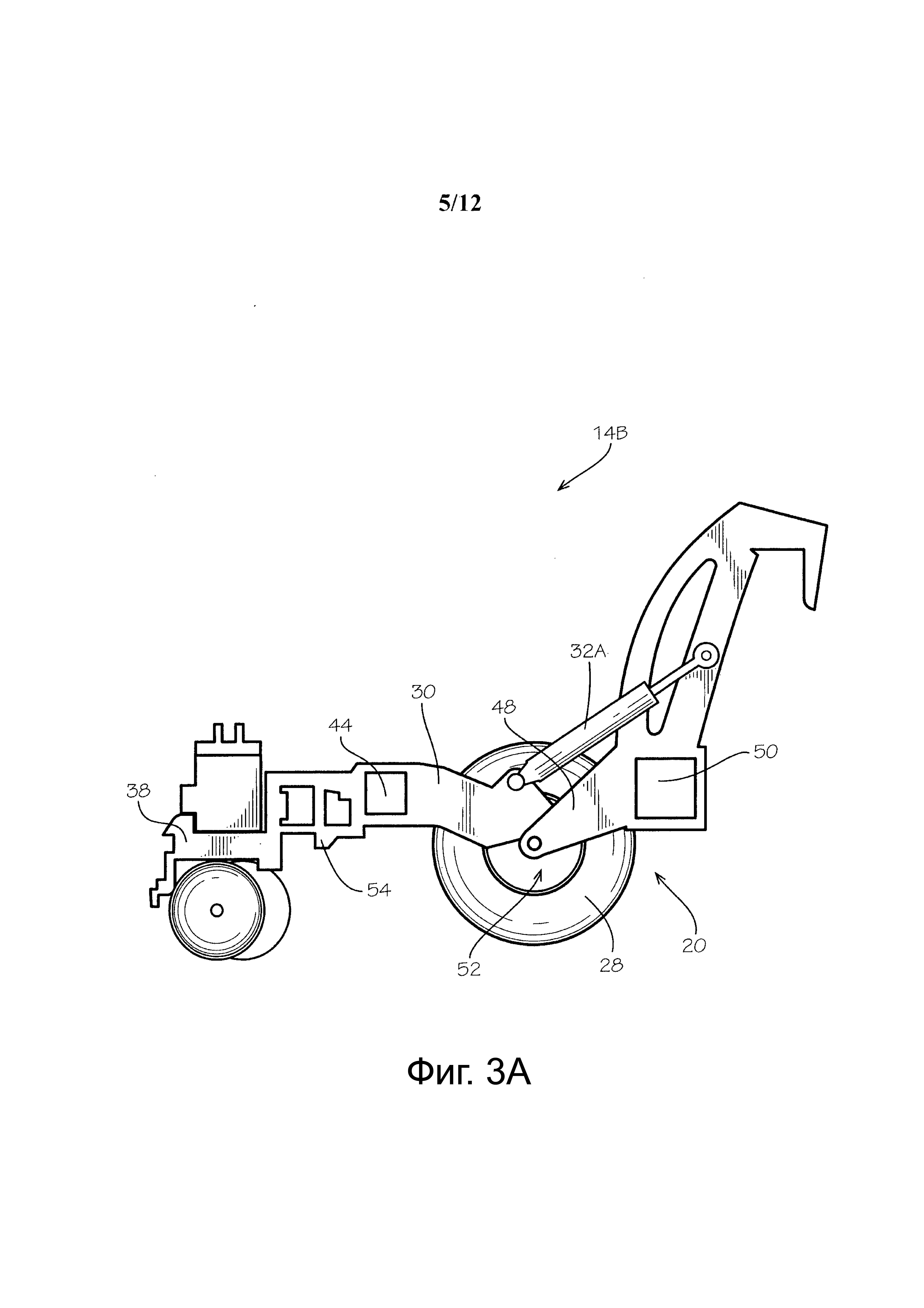
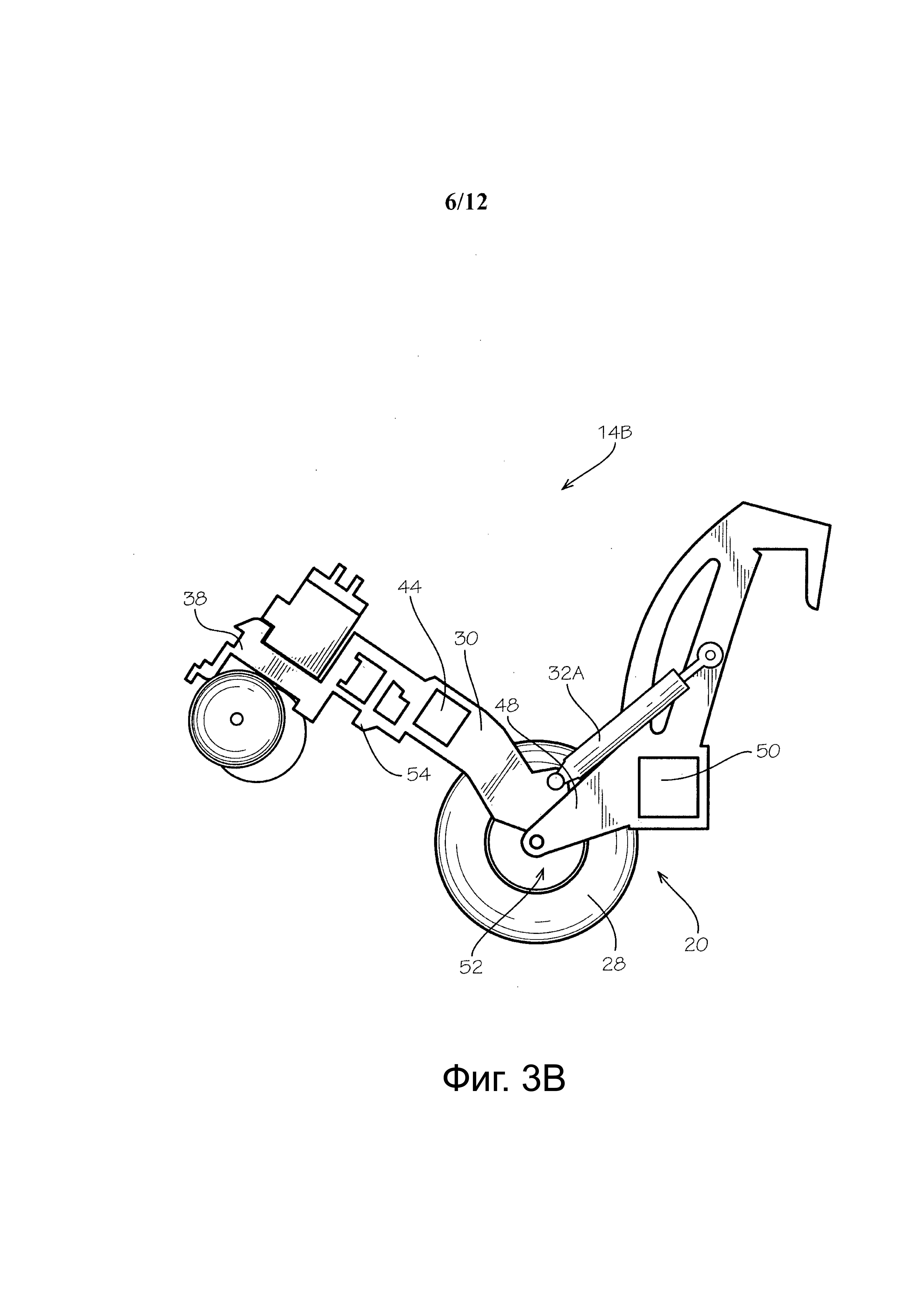
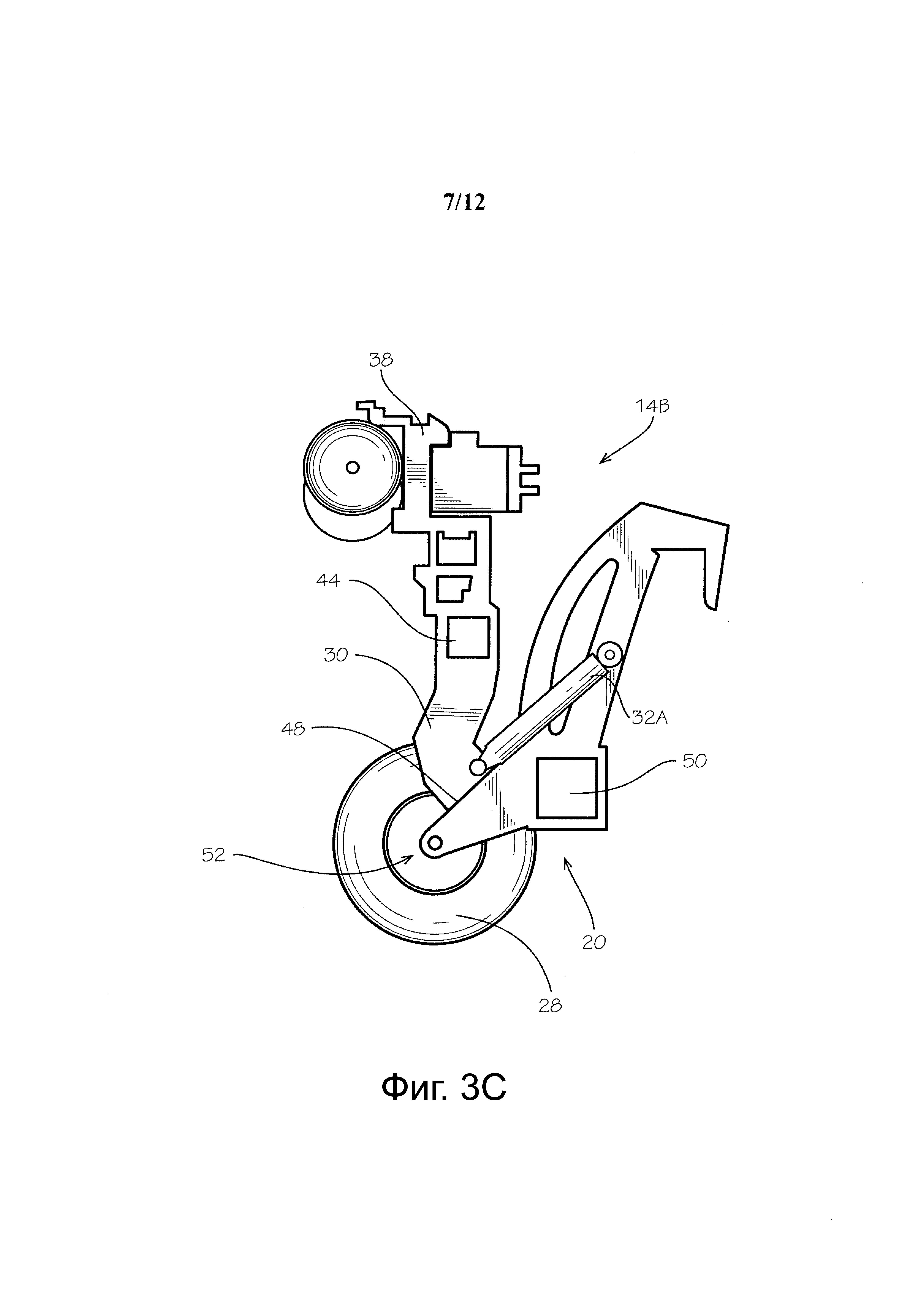
На фиг. 3A-3C показаны отдельные части инструмента 14B, поясняющие поворот навесного бруса 44 рамного элемента 22 относительно рамного элемента 20. Конфигурация инструмента 14B может быть аналогична конфигурации инструментов 14 (фиг. 1) и 14A (фиг. 2A). На вышеуказанных чертежах представлены виды сбоку (при взгляде вбок от центральной секции 26 (фиг. 1)) рядом с колесом 28. На соответствующих чертежах фиг. 3A-3C справа (передняя часть) налево (задняя часть) показан (передний) рамный элемент 20, включающий в себя проходящую в поперечном направлении тяговую штангу 50, которая в одном из возможных вариантов осуществления имеет прямоугольную форму поперечного сечения. Угловые положения указаны относительно горизонтальной плоскости, проходящей через центр тяговой штанги 50 (данная плоскость показана пунктиром). Могут быть использованы и другие точки отсчета, важно лишь показать изменение угла поворота. Кроме того, рамный элемент 20 содержит поперечное плечо 48, отходящее назад от тяговой штанги 50, и в одном из возможных вариантов осуществления, прикрепленное к ступице колеса 28, а также в шарнирной точке 52 шарнирно соединенный с поперечным плечом 30 (заднего) рамного элемента 22. Поперечное плечо 30 отходит вперед от навесного бруса 44. Кроме того, рамный элемент 22 содержит скобы для приспособлений (лучше всего показаны на фиг. 2A, скоба 46 для приспособлений), к которым параллельными элементами связи 54 подсоединяется высевающая секция 38. Гидроцилиндр 32A с двухсторонним штоком установлен между рамным элементом 20 и поперечным плечом 30 рамного элемента 22 в положении рядом с поперечными плечами 30, 48 (например, совпадающем с ними).
Как показано на фиг. 3A, гидроцилиндр 32A с двухсторонним штоком повернул навесной брус 44 относительно рамного элемента 20 (например, относительно горизонтальной плоскости тяговой штанги 50) к углу приблизительно 0°, обеспечивая возможность работы высевающей секции 38.
Как показано на фиг. 3B, гидроцилиндр 32A с двухсторонним штоком повернул навесной брус 44 относительно рамного элемента 20 (например, относительно горизонтальной плоскости тяговой штанги 50) в промежуточное угловое положение, соответствующее максимальной длине хода штока (при полном втягивании, нижнего конца штока гидроцилиндра 32A с двухсторонним штоком, хотя, как уже было указано выше, в некоторых вариантах осуществления длина хода может регулироваться оператором или может быть запрограммирована каким-либо иным методом на втягивание на длину меньше максимальной), обеспечивая возможность перемещения инструмента 14B на незапаханном конце поля.
Как показано на фиг. 3C, гидроцилиндр 32A с двухсторонним штоком повернул навесной брус 44 относительно рамного элемента 20 (например, относительно горизонтальной плоскости тяговой штанги 50) на угол приблизительно 90°, благодаря совместному действию нижнего и верхнего концов штока при полном втягивании штоков гидроцилиндра 32A с двухсторонним штоком, что обеспечивает получение конфигурации инструмента 14B для транспортировки без необходимости поднятия рамы.
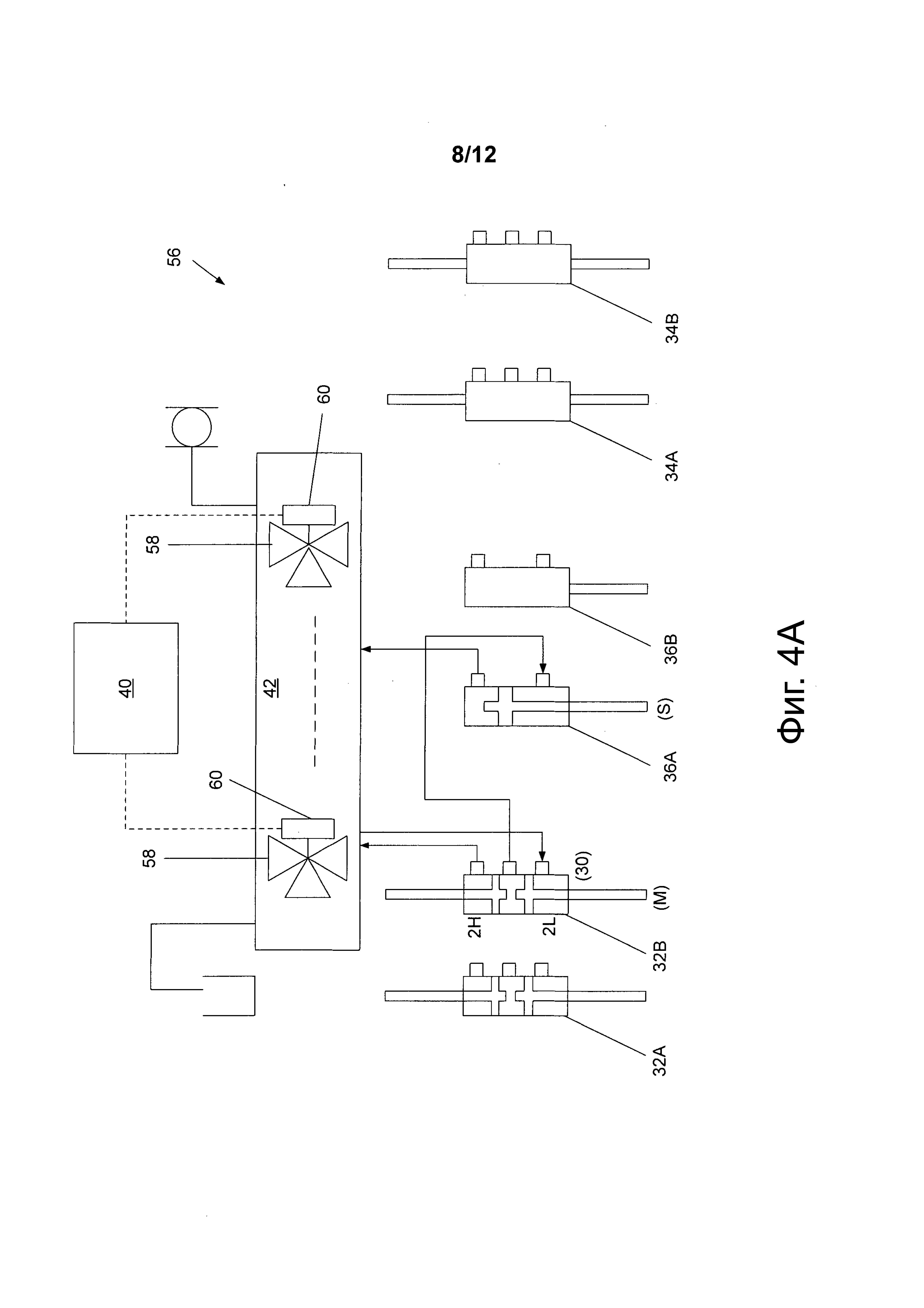
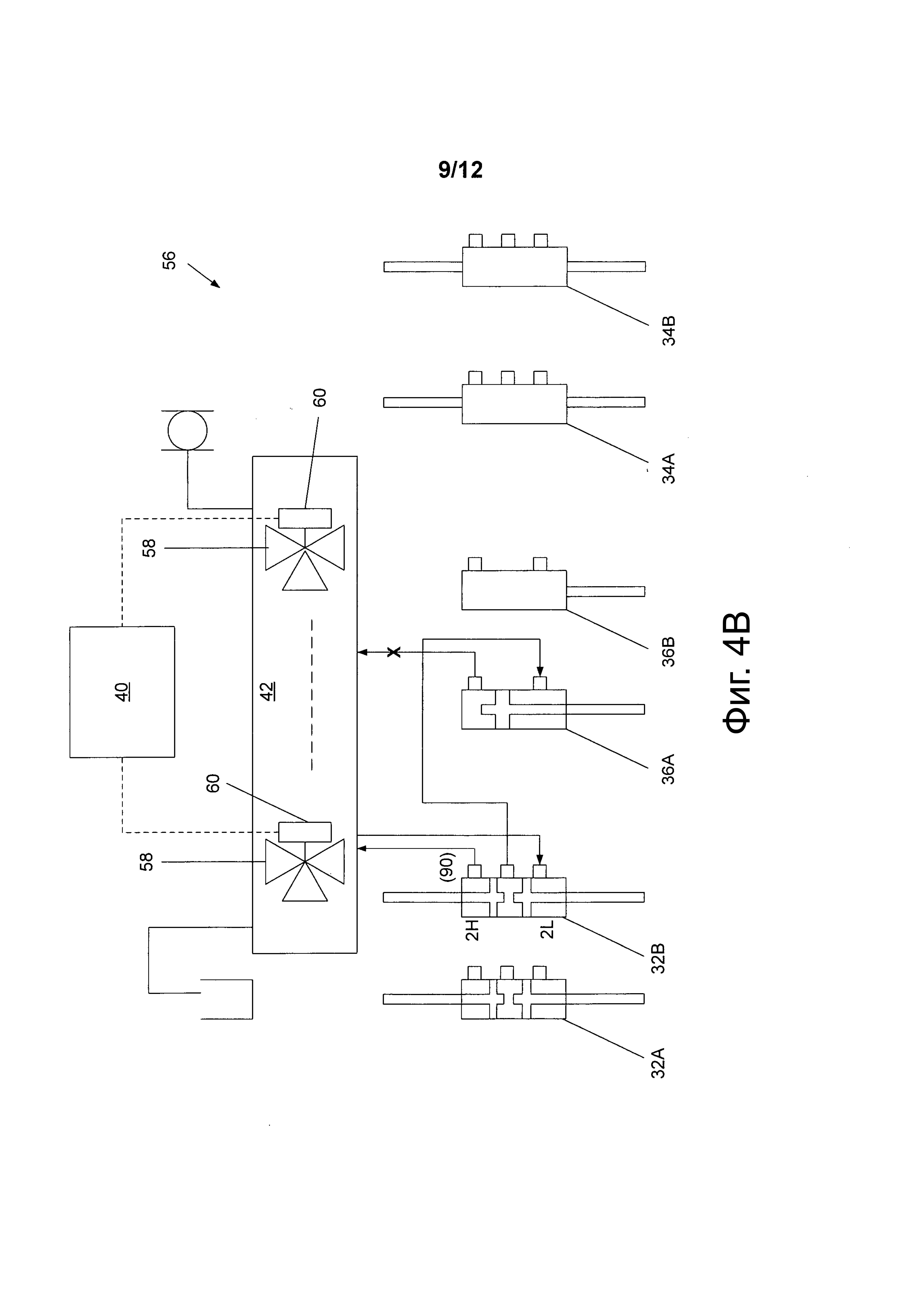
На фиг. 4A-4B показан пример гидравлической системы 56, используемой для привода гидроцилиндров варианта выполнения системы с поворотным навесным брусом. Специалисту в данной области в контексте изобретения будет понятно, что возможны изменения и модификации гидравлической системы 56, при условии, что приведение в действие гидроцилиндров 32, 34 с двухсторонним штоком и гидроцилиндров 36 с односторонним штоком приводит к такому же или аналогичному результату. Гидравлическая система 56 содержит управляющий компонент 42, гидроцилиндры 32, 34 с двухсторонним штоком и гидроцилиндры 36 с односторонним штоком, а также каналы (например, трубки, шланги и т.д.), используемые для соединения друг с другом компонентов, источник перепада давления (например, насос) и емкость. В одном из возможных вариантов осуществления, управляющий компонент 42 представляет собой клапанную коробку, в которой, как известно, установлен один или более управляющих клапанов 58. Каждый из управляющих клапанов 58 содержит корпус, элемент регулирования потока (например, лопасть, диск, шарик и т.п.), а также тарелку или золотник, выполняющий функцию границы раздела между элементом регулирования расхода и блоком 60 управления. В качестве блока 60 управления может быть использован соленоид, электромотор, плата управления, переключатель, реле и т.д. Блок 60 управления непосредственно или с помощью других компонентов или другого управляющего блока связан с блоком 40 управления. Сообщение может быть беспроводным или с помощью проводного соединения, и это сообщение на фиг. 4A-4B показано мелкими пунктирными линиями. Хотя мы рассматриваем электронный регулятор, управление управляющими клапанами может осуществляться также с помощью пневматического регулятора или какого-либо другого регулятора. Управляющие клапаны 58 соединены по текучей среде с гидроцилиндрами 32, 34 с двухсторонним штоком и гидроцилиндрами 36 с односторонним штоком, что показано сплошными линиями. В одном из возможных вариантов осуществления, управляющие клапаны 58 могут быть многопозиционными, например, трехпозиционными клапанами. Как было указано выше, соединение по текучей среде может осуществляться с помощью одного или более каналов.
Как известно, и рассматривая гидроцилиндр 32B с двухсторонним штоком (гидроцилиндры 32A, 34 с двухсторонним штоком имеют аналогичную конструкцию), мы видим, что гидроцилиндр 32B с двухсторонним штоком содержит в своем корпусе три отверстия, соответствующих трем полостям (средняя полость является открытой, хотя в некоторых вариантах осуществления, она может быть отдельной, закрытой полостью) внутри корпуса гидроцилиндра 32B с двухсторонним штоком. Иными словами, в конструкции гидроцилиндра 32B с двухсторонним штоком с тремя (3) отверстиями центральная полость расположена между верхним концом штока (например, при повороте на угол приблизительно 30-90°) и нижним концом штока (например, при повороте на угол 0-30°, при необходимости). Как было указано выше, могут быть использованы диапазоны, включающие в себя другие значения углов для промежуточного углового положения. В некоторых вариантах осуществления, гидроцилиндр 32B с двухсторонним штоком может иметь отдельную или разделенную центральную полость, центральное, показанное на фиг. 4A-4B отверстие в которой заменено двумя отверстиями, в результате чего получается конструкция гидроцилиндра с двухсторонним штоком с 4 отверстиями. При использовании конструкции гидроцилиндра с двухсторонним штоком с 4 отверстиями верхний и нижний штоки являются функционально абсолютно независимыми друг от друга, что устраняет или сводит к минимуму риск перекрестных помех между двумя гидравлическими функциями верхнего и нижнего штоков, хотя это и достигается за счет дополнительных гидравлических компонентов. Штоки на каждом конце гидроцилиндра 32B с двухсторонним штоком выдвигаются и втягиваются (с фиксацией положения) в зависимости от состояния (например, давления или расхода) гидроцилиндра 32B с двухсторонним штоком. Например, изменения потока через отверстия и/или изменения перепада давлений на соответствующих поршнях гидроцилиндра 32B с двухсторонним штоком соответствует изменениям состояния. Как уже указывалось выше, один конец штока (2L, 2-й нижний) гидроцилиндра с двухсторонним штоком 32B используется для поворота на незапаханном конце поля (например, для поворота навесного бруса 44 (фиг. 2A) в промежуточное угловое положение при максимальном или почти максимальном ходе), а другой конец штока гидроцилиндра с двухсторонним штоком (2H, или 2-й верхний) используется, совместно с втягиванием нижнего конца штока, для поворота навесного бруса 44 полностью вверх (например, для поворота его на угол приблизительно 90°) для транспортировки.
Как показано на фиг. 4A-4B, гидроцилиндры с двухсторонним штоком расположены в направлении слева направо следующим образом: сначала установлены два гидроцилиндра 32A, 32B с двухсторонним штоком для боковой секции 24A (фиг. 1), за ними установлены два гидроцилиндра 36A, 36B с односторонним штоком для центральной секции 26 (фиг. 1), и за ними следуют два гидроцилиндра 34A, 34B с двухсторонним штоком для боковой секции 24B. Следует отметить, что в некоторых вариантах осуществления может быть применено другое количество гидроцилиндров для каждой секции. Обратимся снова к гидроцилиндрам боковой секции 24A и половины центральной секции 26 (имея в виду, что аналогичное описание применимо к другой половине центральной секции 26 и боковой секции 24B). Отверстия 2H и 2L соединены с управляющим клапаном 58 для обеспечения возможности выполнения хода (полного втягивания) штока 2H совместно с ходом (полного втягивания) штока 2L (для поворота на угол 90°), а также для независимого управления (например, для выполнения хода штока 2L независимо от штока 2H с целью обеспечения начального максимального поворота в промежуточное угловое положение (например, для поворота на угол 30°)). Среднее окно гидроцилиндра 32B с двухсторонним штоком, расположенное рядом с гидроцилиндром 36A с односторонним штоком, соединено с одним из отверстий гидроцилиндра 36A с односторонним штоком, а другое отверстие гидроцилиндра 36A с односторонним штоком соединено с управляющим клапаном 58. Благодаря соединению с одним из отверстий гидроцилиндра 36A с односторонним штоком, ход штока 2L гидроцилиндра 32B с двухсторонним штоком равен ходу поршня соседнего гидроцилиндра 36A с односторонним штоком, что обеспечивает поворот из одного и того же положения и выполняет функцию механического останова. Иными словами, гидроцилиндр 36A с односторонним штоком (обозначенный буквой «S», т.е. «вспомогательный») и гидроцилиндр 32B с двухсторонним штоком (обозначенный буквой «M», т.е. «главный») соединены друг с другом в конфигурации «главный-вспомогательный», в которой независимый ход верхнего штока гидроцилиндра 32B с двухсторонним штоком (например, при повороте на угол приблизительно 30-90°) не может привести к независимому перемещению штока гидроцилиндра 36A с односторонним штоком, пока не произойдет полное втягивание нижнего штока гидроцилиндра 32B с двухсторонним штоком и штока гидроцилиндра 36A с односторонним штоком. Соответственно, в одном из возможных вариантов осуществления, начиная с незапаханного конца поля (например, при повороте на угол приблизительно 20-30°), когда нижний шток гидроцилиндра 32B с двухсторонним штоком и шток гидроцилиндра 36A с односторонним штоком полностью втянуты, верхний шток гидроцилиндра 32B с двухсторонним штоком может независимо перемещаться в полностью убранное положение для поворота на угол приблизительно 90°. Следует отметить, что в некоторых вариантах осуществления гидроцилиндр 32B с двухсторонним штоком может быть немного меньше, чем полное втягивание, и, тем не менее, может запускать операции поворота на угол приблизительно 90° (разумеется, только после полного втягивания нижнего штока для фактического достижения угла поворота приблизительно 90°, поскольку угол поворота 90° достигается только при совместном втягивании нижнего (L) и верхнего (H) штоков).
Что касается вышеупомянутой функции механического останова, несмотря на независимое перемещение навесного бруса для центральной секции 26 (см. фиг. 1) и боковых секций 24 (см. фиг. 1) для уменьшения габаритов при операциях транспортировки по дорогам, при операциях в поле (например, при выполнении поворотов на незапаханном конце поля), навесные брусья 22 центральной и боковых секций (фиг. 1) поднимаются и опускаются одновременно или почти одновременно (например, с одинаковой или практически одинаковой скоростью на одинаковую высоту). При операциях транспортировки навесной брус 22 центральной секции поднимается на максимальный угол приблизительно 30°, при котором или вблизи которого навесной брус 22 центральной секции входят в пространство, занимаемое другими устройствами сеялки, и начинают им механически мешать. Аналогичным образом, навесные брусья 44 боковых секций (фиг. 2A) также поднимаются в режиме транспортировки с навесным брусом 22 центральной секции, после чего производится дальнейший поворот навесных брусьев 44 боковой секции до угла приблизительно 90°. В конфигурации «главный-вспомогательный» навесные брусья 22 центральной 26 и боковых 24 секций поворачиваются одновременно (с приблизительно одинаковой скоростью) до максимального угла поворота промежуточного углового положения. На практике, в качестве примера выполнения операции транспортировки можно указать способ, заключающийся в том, что навесные брусья 22 центральной секции поднимаются одновременно на угол приблизительно 20° (для достижения минимально допустимого клиренса прицепных высевающих секций), после чего боковые секции 24 складываются вперед. Затем производится баланс втягивания штоков гидроцилиндров 36 с односторонним штоком и нижних концов штоков гидроцилиндров 32, 34 с двухсторонним штоком, при котором навесной брус 22 центральной секции достигает своего механического останова, как было указано выше. Затем ход верхних штоков гидроцилиндров 32, 34 с двухсторонним штоком комбинируется с полным втягиванием нижних концов штоков для поворота навесных брусьев 44 боковых секций 24 на угол приблизительно 90° (также осуществляемого одновременно). По окончании операции сцепной узел 16 (фиг. 1) известным способом поднимает переднюю часть сложенных боковых секций инструмента с жестко закрепленными колесами. Фактически, механический останов обеспечивается за счет полного втягивания штоков гидроцилиндров 36 с односторонним штоком и гидроцилиндров 32, 34 с двухсторонним штоком.
В одном из возможных примеров работы (здесь мы также рассматриваем гидроцилиндры боковой секции 24A и половины центральной секции 26, имея ввиду, что аналогичная и, в одном из возможных вариантов осуществления, одновременная работа выполняется для другой половины центральной секции 26 и для боковой секции 24B), входной сигнал, получаемый блоком 40 управления, запускает управляющие сигналы, которые должны передаваться блоком 40 управления на управляющий компонент 42, и, в частности, на блок 60 управления управляющего клапана 58. Входной сигнал на блок 40 управления, в одном из возможных вариантов осуществления, может поступать от оператора, может быть заложен в программном обеспечении, или может подаваться в результате срабатывания устройства при обнаружении достижения угла поворота или требуемого положения. Например, оператор может нажать кнопку (или выдать команду с помощью речевого пользовательского интерфейса), включить переключатель или использовать другие виды интерфейсов, когда трактор 12 (фиг. 1) приближается к незапаханному концу поля, и требуется поднять навесной брус 44 (фиг. 2A). В другом примере, установленная на тракторе 12 (или инструменте 14) глобальная навигационная спутниковая система (ГНСС) может обнаруживать незапаханный конец поля (например, путем сравнения обнаруженных координат с заложенной картой топологических признаков) и выдавать сигнал на блок 40 управления для начала операции поворота навесного бруса 44 на основании структуры данных команд, соответствующих этим расположениям. В свою очередь, управляющий клапан 58 задействуется сигналом от блока 40 управления, что, в свою очередь, приводит к изменению состояния гидроцилиндров 32A, 32B с двухсторонним штоком и гидроцилиндра 36A с односторонним штоком. Например, изменение состояния может проявляться в виде изменения расхода текучей среды, поступающей в отверстие 2L гидроцилиндра с 32B двухсторонним штоком (и отверстие 2L гидроцилиндра с 32A двухсторонним штоком). Изменение расхода передается от среднего отверстия гидроцилиндров 32B с двухсторонним штоком к одному из отверстий гидроцилиндра 36A с односторонним штоком, в результате чего все гидроцилиндры 32A, 32B и 36A приходят в измененное состояние (например, приводятся в действие) одновременно (или практически одновременно), что, в свою очередь, приводит к повороту навесного бруса (например, навесного бруса 44) на максимальный угол приблизительно 30° (или на другой запрограммированный или введенный пользователем максимальный угол, как было указано выше).
Как показано на фиг. 4B, после получения сигнала блоком 40 управления (например, поданного пользователем или поступившим от какого-либо другого устройства, указывающего на необходимость изменения конфигурации инструмента для операции транспортировки по дороге), блок 40 управления подает на управляющий клапан 58 сигнал, который изменяет конфигурацию управляющего клапана 58. Изменение конфигурации управляющего клапана 58 приводит к стабилизации усилия на гидроцилиндре 36A с односторонним штоком (например, к удержанию штока в промежуточном угловом положении). В частности, управляющий клапан 58 перекрывает подачу текучей среды в гидроцилиндр 36A с односторонним штоком (например, измененное состояние), хотя и обеспечивает возможность изменения состояния за счет изменения потока текучей среды через отверстие 2H гидроцилиндров 32A и 32B с двухсторонним штоком. Активация гидроцилиндров 32A, 32B с двухсторонним штоком приводит к повороту навесного бруса 44 (фиг. 2A) на угол приблизительно 90° (за счет совместного действия состояний полного втягивания гидроцилиндров 32, 34 с двухсторонним штоком), благодаря чему рамные элементы 20, 22 (фиг. 1) переходят в малогабаритную конфигурацию для транспортировки без необходимости применения каких-либо независимых систем (для поднятия рамы и для поднятия навесного бруса, соответственно) с соответствующими дополнительными гидравлическими системами и связанными повышением стоимости и увеличением веса. Иными словами, поворот навесного бруса (без необходимости применения подъемных устройств для колес боковых секций, применяемых в обычных системах) и режим транспортировки были объединены с использованием для этого единой гидравлической системы 56 со встроенными механическими упорами. Иными словами, рамный элемент 20 (фиг. 1), в отличие от обычных систем, остается на одной и той же высоте при выполнении всех операций в поле, что устраняет необходимость в мощных гидроцилиндрах и/или обеспечивает уменьшение требуемого количества гидроцилиндров. Следует отметить также, что работа гидроцилиндров центральной секции происходит в соответствии с операциями гидроцилиндров боковых секций (например, механизм управления типа «основной-вспомогательный»). В некоторых вариантах осуществления, могут использоваться дополнительные электронные устройства управления (например, датчики) для обеспечения более сложного управления (например, пирингового управления).
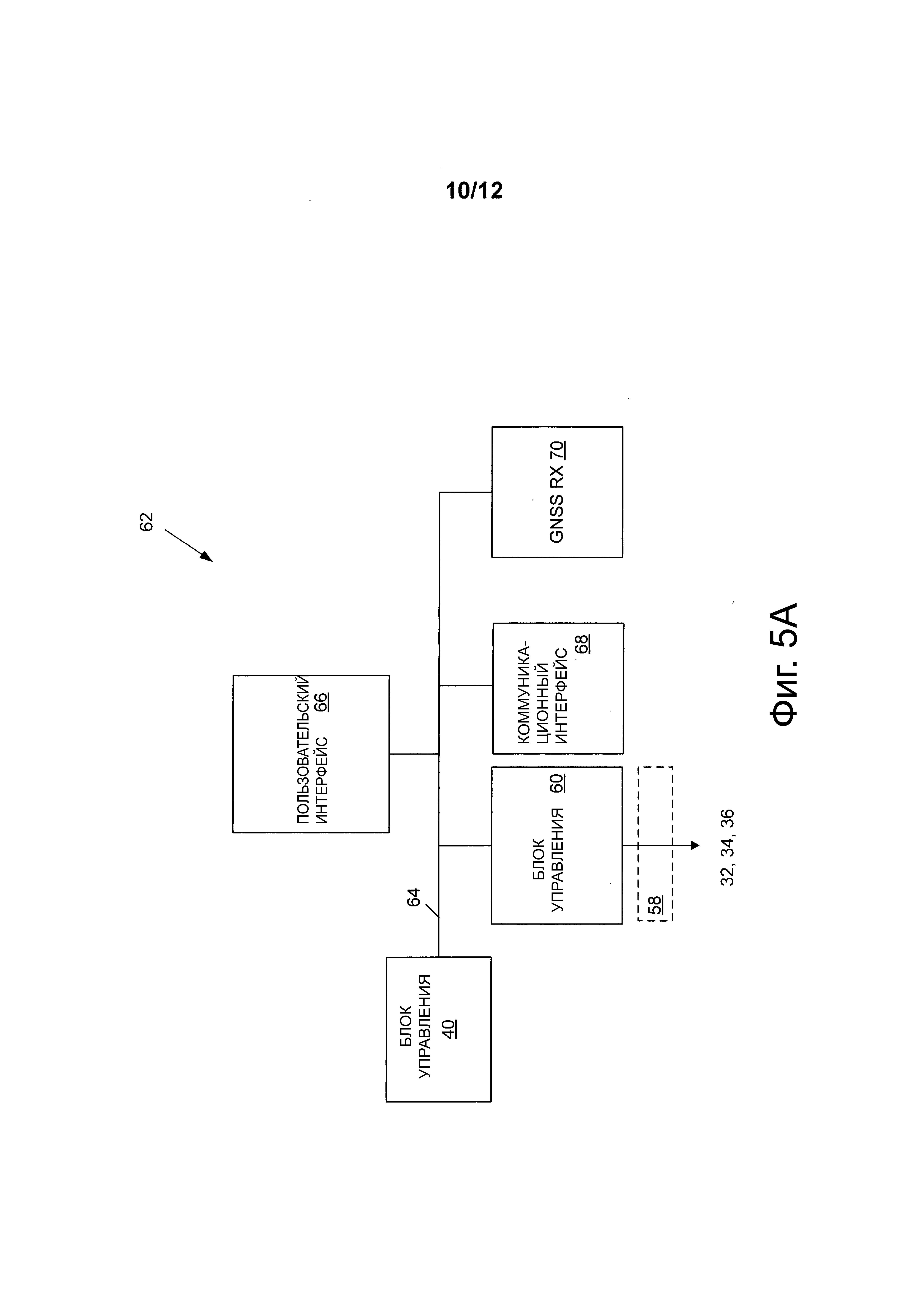
На фиг. 5A показан вариант выполнения системы 62 управления, используемой в качестве управляющего интерфейса между оператором, вводимыми программой и/или устройствами командами и действиями гидроцилиндров гидросистемы 56 (фиг. 4A). В контексте изобретения необходимо отметить, что некоторые варианты осуществления могут включать дополнительные компоненты или меньшее их количество, или другие компоненты, и что пример, показанный на фиг. 5A является чисто поясняющим и отображает лишь один из возможных вариантов осуществления. Система 62 управления может быть установлена непосредственно на инструменте (например, на инструменте 14 на фиг. 1), распределена между тягачом (например, трактором 12 на фиг. 1) и инструментом, или между дополнительными устройствами (например, в виде пульта дистанционного управления). Кроме того, хотя, как показано на чертежах, в системе 62 управления используется единственный блок 40 управления, в некоторых вариантах осуществления система 62 управления может содержать несколько блоков управления, конструкция которых аналогична конструкции блока 40 управления. В рассматриваемом варианте осуществления, блок 40 управления с помощью одной или более вычислительных сетей 64 [например, сети CAN (локальная сеть интеллектных контроллеров) или другой, такой как сеть, выполненная в соответствии со стандартом ISO 11783, также называемая сетью «Isobus»], соединен с блоком 60 управления (например, управляющего компонента 42, см. фиг. 4A), и пользовательским интерфейсом 66. В некоторых вариантах осуществления, система 62 управления может включать дополнительные компоненты, в том числе, коммуникационный интерфейс 68 и приемник 70 ГНСС, объединенные сетью 64. Следует отметить, что операции системы регулирования в описании рассматриваются в первую очередь в контексте управления посредством одного блока 40 управления, однако, следует иметь в виду, что в некоторых вариантах осуществления могут использоваться и дополнительные блоки управления для выполнения одной или нескольких раскрываемых функций.
Как было указано выше, блок 60 управления содержит компоненты, используемые для управления операциями одного или более управляющих клапанов 58, и включает в себя соленоид, электромотор и/или другой блок управления для приведения в действие золотника или тарелки (тарелок). Блок 60 управления может получать сигналы, проходящие по сети 64 от блока 40 управления, и в ответ на эти сигналы, задействовать клапан(ы) 58. В некоторых вариантах осуществления, блок 60 управления может содержать электрический, электромагнитный, магнитный привод или пневматический привод.
Пользовательский интерфейс 66 может содержать один или более компонентов, включая одну или более комбинаций из клавиатуры, мышки, микрофона, устройства индикации с сенсорным или несенсорным управлением (например, экранный монитор или экран), джойстика, поворотного колеса, рычага FNR и/или других устройств, например, переключателей, гарнитуры с многонаправленным воздействием и т.д.), которые обеспечивают возможность ввода и/или вывода командного сигнала оператором. Например, в некоторых вариантах осуществления, пользовательский интерфейс 66 может использоваться для вывода на монитор опций управления инструментом (например, поднятия инструмента на незапаханном конце поля, поднятия для операции транспортировки по дороге и т.д.), чтобы оператор мог выбрать из них необходимую, или же пользовательский интерфейс 66 может обеспечивать обратную связь при выполнении вышеупомянутых действий или подготовке к их автоматическому выполнению (например, предоставление оператору возможности подтвердить или отменить). В некоторых вариантах осуществления, функции поворота навесного бруса 44 (например, на фиг. 2A) в различные рабочие положения могут осуществляться путем задействования переключателя, рычага, рукоятки и т.д., или путем подачи голосовой команды.
Коммуникационный интерфейс 68 может содержать беспроводной сетевой интерфейсный модуль (например, включая радиочастотный модем и/или модем сотовой связи) для обеспечения беспроводной связи между другими устройствами комбинации тягача/инструмента или с дистанционными устройствами (например, являющимися внешними по отношению к инструменту и тягачу). Коммуникационный интерфейс 68 (на фиг. 5A) может работать совместно с коммуникационным программным обеспечением (например, включая браузерное ПО) в блоке 40 управления, или как часть другого блока управления, соединенного с сетью 64 и выполняющего функцию шлюза для обеспечения беспроводной связи в сеть 64 и из неё. Как должно быть ясно специалисту в данной области техники, коммуникационный интерфейс 68 может содержать компоненты MAC (обеспечения доступа к сети) и PHY (физические) (например, радиосистему, включая приемопередатчики, антенны и т.д.).
Например, приемник ГНСС (GNSS RX) 70 может содержать GPS-приемник, служащий для определения координат тягача и/или инструмента. Приемник ГНСС 70 может функционировать совместно с картами полей, заложенными в блоке 40 управления (или получаемыми от удаленного сервера), для обеспечения возможности обнаружения незапаханных концов поля, дорог, въездов на поле и т.д.
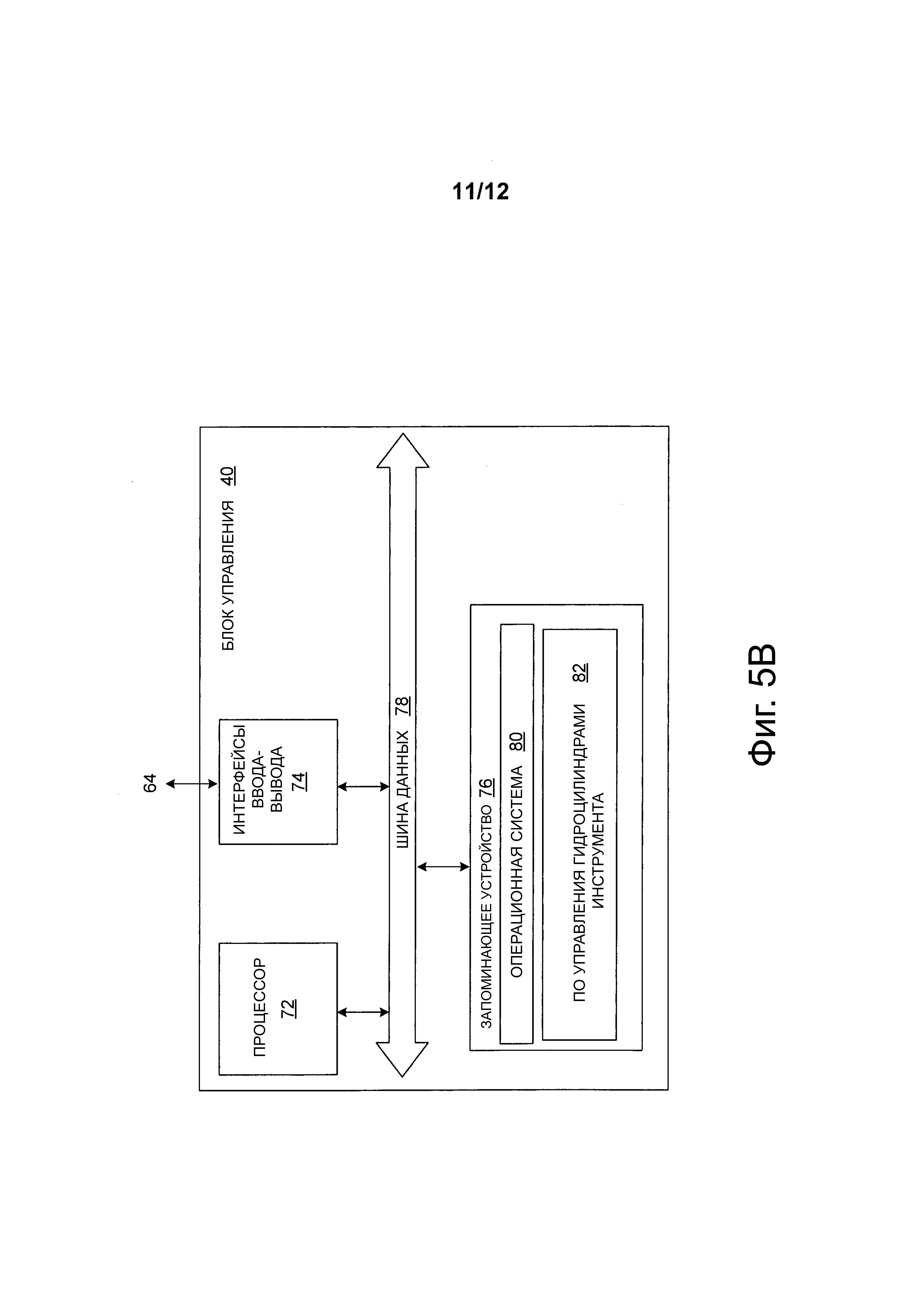
На фиг. 5B показан возможный вариант выполнения блока 40 управления. Специалисту в данной области техники будет понятно, что в контексте изобретения показываемый в качестве примера блок 40 управления является чисто поясняющим, и что различные варианты выполнения блока управления могут содержать большее или меньшее количество компонентов, и/или некоторые функции различных компонентов, показанных на фиг. 5B, могут быть скомбинированы или, в некоторых вариантах осуществления, распределены между другими дополнительными модулями. Следует иметь в виду, что, хотя мы и рассматриваем блок 40 управления как установленный на тракторе 12 (фиг. 1), в некоторых вариантах осуществления все или некоторые компоненты, выполняющие соответствующие функции, могут быть размещены на инструменте (например, на инструменте 14, см. фиг. 1) или в вычислительном устройстве или системе, расположенной вне трактора 12 и/или инструмента. Как показано на фиг. 5B (продолжая ссылаться также на фиг. 5A), в данном примере мы рассматриваем блок 40 управления или электронный блок управления (ЭБУ), выполненный в виде компьютера, однако, он может быть выполнен и в виде программируемого логического контроллера (ПЛК), программируемой пользователем вентильной матрицы (ППВМ), специализированной интегральной схемы (СИС) и других устройств. Следует отметить, что некоторые хорошо известные компьютерные компоненты опущены и не рассматриваются, чтобы не затенять основные особенности блока 40 управления. В одном из возможных вариантов осуществления, блок 40 управления содержит один или более процессоров (называемых также процессорными модулями или процессорными блоками), таких как процессор 72, интерфейс(ы) 74 ввода-вывода и запоминающее устройство (ЗУ) 76, которые все подсоединены к одной или нескольким шинам данных, таким как шина 78 данных. ЗУ 76 может содержать один элемент или комбинацию элементов энергозависимой памяти (запоминающее устройство с произвольной выборкой (ЗУПВ), динамическое ЗУ с произвольной выборкой (ДЗУПВ) и статическое запоминающее устройство с произвольной выборкой (СЗУПВ) и т.д.) и энергонезависимой памяти (например, ПЗУ, флэш-память, жесткий диск, СППЗУ, ЭСППЗУ, ПЗУ на компакт-диске (CD-ROM) и т.д.). В ЗУ 76 может быть заложена собственная операционная система, одно или несколько «родных» приложений, эмулированные системы или эмулированные приложения для любой или нескольких операционных систем и/или эмулированных аппаратных платформ, эмулированных операционных систем и т.д.
В показанном на фиг. 5B варианте выполнения ЗУ 76 содержит операционную систему 80 и программное обеспечение (ПО) 82 управления гидроцилиндрами инструмента. Следует отметить, что в некоторых вариантах осуществления, ЗУ 76 или дополнительные ЗУ могут содержать большее или меньшее количество модулей (например, комбинированной функциональности). В некоторых вариантах осуществления, к шине 78 данных может быть подключено отдельное ЗУ, такое как постоянная память (например, оптическое, магнитное и/или полупроводниковое ЗУ и соответствующие приводы).
ПО 82 управления гидроцилиндрами инструмента получает входной сигнал от пользовательского интерфейса 66 (через интерфейсы 74 ввода-вывода и сеть 64). В некоторых вариантах осуществления, этот входной сигнал может представлять собой сигнал ПО или устройства, включая сигнал системы ГНСС (или его обработанный вариант), содержащий координаты, используемые ПО 82 управления гидроцилиндрами инструмента для нанесения на карту координат с целью обозначения определенных особенностей поля, включая незапаханные концы поля или дороги, ведущие к полю (или въездам на поле). Такая информация может быть использована ПО 82 управления гидроцилиндрами инструмента для определения момента, когда следует осуществлять автоматический поворот навесного бруса 44 (фиг. 2A) с целью приведения его в одно из множества рабочих положений, в зависимости от положения на поле. Например, некоторые места на поле могут быть введены в инструкцию или команду, включающую в себя угол поворота навесного бруса и соответствующий ход штока и соответствующее положение управляющего клапана. Эта команда может выдаваться ПО 82 управления гидроцилиндрами инструмента одному или нескольким блокам 60 управления управляющего клапана/клапанов 58. В вариантах осуществления, в которых входной сигнал подается оператором через пользовательский интерфейс 66 (или в виде команд дистанционного управления), ПО 82 управления гидроцилиндрами инструмента получает сигнал от пользовательского интерфейса, преобразует его в команду и передает команду в блок (или блоки) 60 управления управляющего клапан/клапанов 58. Получающиеся в результате этого изменения потока передаются на цилиндры, как было описано выше. В некоторых вариантах осуществления, ПО 82 управления гидроцилиндрами инструмента может работать совместно с пользовательским интерфейсом 66 для обеспечения обратной связи действий на экране монитора (или через громкоговоритель) и/или для обеспечения возможности подтверждения приближающегося срабатывания или возможности прерывания.
ПО 82 управления гидроцилиндрами инструмента может быть выполнено в виде процессора 72, управляемого и/или контролируемого операционной системой 80. Процессор 72 может представлять собой специализированный процессор или процессор общего применения, центральное процессорное устройство (ЦПУ) или вспомогательный процессор среди нескольких процессоров, полупроводниковый микропроцессор (в форме микрочипа), макропроцессор, одной или нескольких специализированных ИС (СИС), множества соответствующим образом сконфигурированных логических элементов цифровой ИС и/или других известных электронных конфигураций, содержащих дискретные элементы, как по отдельности, так и в различных комбинациях друг с другом, для координации работы блока 40 управления в целом.
Интерфейсы 74 ввода-вывода представляют собой одно или несколько устройств сопряжения с сетью 64 и другими сетями. Иными словами, интерфейсы 74 ввода-вывода могут содержать любое количество устройств сопряжения для ввода и вывода сигналов (например, аналоговых или цифровых данных) для передачи информации (например, данных) по сети 64. Входной сигнал может представлять собой сигнал, подаваемый оператором (локально или дистанционно) через пользовательский интерфейс 66, и входные сигналы, передающие информацию от одного или нескольких компонентов системы 62 управления, как было объяснено выше.
Если в определенных вариантах осуществления блок 40 управления по меньшей мере частично выполнен с ПО (включая прошивку), как показано на фиг. 5B, следует иметь в виду, что данное ПО может быть заложено на множестве машиночитаемых носителей для долговременного хранения информации, используемых совместно с множеством компьютерных систем и методов. В контексте изобретения, машиночитаемый носитель может представлять собой электронное, магнитное, оптическое или другое физическое устройство, которое может содержать, или в котором может быть заложена компьютерная программа (например, исполняемый код или команды) для использования компьютерной системой или методом или совместно с ней. ПО может быть заложено в множестве машиночитаемых носителей используемых или относящихся к системе выполнения команд аппарату или устройству, таким как автоматизированная система, система с процессором или другая система, способная доставлять команды от системы выполнения команд, аппарата или устройства, и выполнять данные команды.
Если определенные варианты блока 40 управления выполнены по меньшей мере частично с аппаратными средствами, такая функциональность может быть реализована с любой из комбинаций хорошо известных далее технологий, к которым относятся: дискретная логическая схема/схемы, содержащие логические вентили для выполнения логических функций инструмента при получении сигналов данных, специализированная ИС (СИС), содержащая соответствующие комбинационные логические шлюзы, программируемая вентильная матрица (матрицы) (ПВМ), программируемая пользователем вентильная матрица (ППВМ) и т.д.
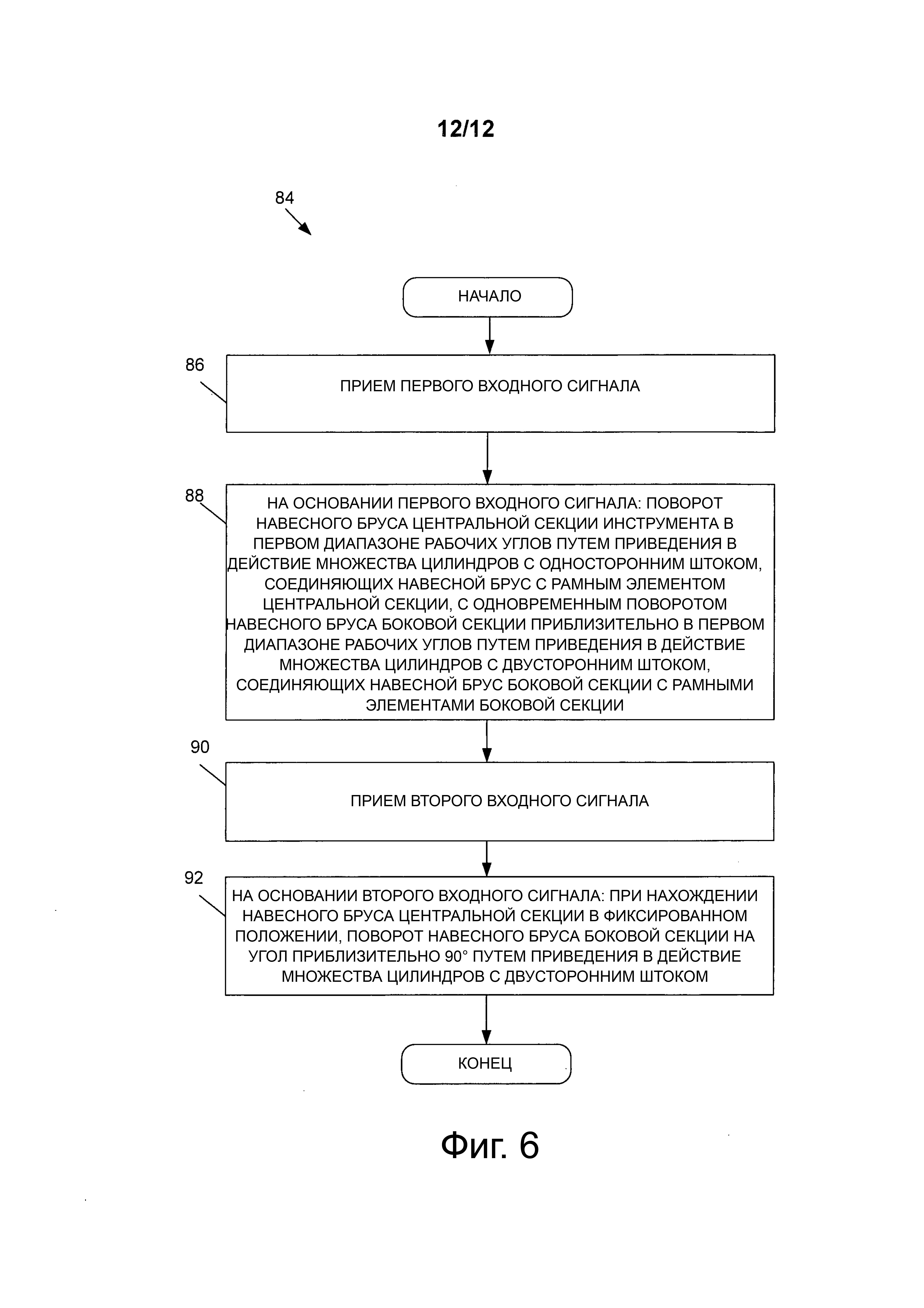
Рассмотрев несколько возможных вариантов выполнения системы c поворотным навесным брусом, перейдем к рассмотрению возможного варианта осуществления способа 84 использования поворотного навесного бруса, реализуемого, например, с помощью ПО 82 управления гидроцилиндрами инструмента; указанный способ включает в себя: получение первого входного сигнала (86); на основании первого входного сигнала: поворот навесного бруса центральной секции инструмента в первом диапазоне рабочих углов путем приведения в действие множества цилиндров с односторонним штоком, соединяющих навесной брус с рамным элементом центральной секции, с одновременным поворотом навесного бруса боковой секции приблизительно в первом диапазоне рабочих углов путем приведения в действие множества цилиндров с двухсторонним штоком, соединяющих навесной брус боковой секции с рамными элементами боковой секции (88); получение второго входного сигнала (90); и на основании второго входного сигнала: при нахождении навесного бруса центральной секции в фиксированном состоянии, поворот навесного бруса боковой секции на угол приблизительно 90° путем приведения в действие множества цилиндров с двухсторонним штоком (92).
Следует иметь в виду, что, как будет понятно специалистам в данной области техники, любые блоки в блок-схемах процессов представляют собой модули, сегменты или части кода, включающего в себя одну или несколько выполняемых команд для осуществления специфических логических функций инструмента или операций процесса, и изобретение включает в себя также альтернативные варианты осуществления, в которых указанные функции могут выполняться в ином порядке, отличающемся от показанного или описанного, в том числе, практически одновременно или в обратном порядке, в зависимости от вовлеченной функциональности.
Следует отметить, что описанные выше варианты выполнения системы c поворотным навесным брусом являются лишь некоторыми из возможным вариантов, рассмотренными здесь исключительно с целью обеспечения более полного понимания принципов устройства и работы системы c поворотным навесным брусом. В вышеописанные варианты выполнения системы c поворотным навесным брусом может быть внесено множество изменений, и сделано множество модификаций, без отхода от сущности и принципов изобретения. Все такие изменения и модификации охватываются объемом изобретения и защищены пунктами формулы изобретения.
Реферат
Группа изобретений относится к сельскому хозяйству, в частности к инструментам, используемым совместно с навесными землеобрабатывающими приспособлениями. Инструмент содержит центральную секцию и пару боковых секций. Каждая из секций содержит пару параллельных рамных элементов, шарнирно соединенных друг с другом. Один из рамных элементов содержит навесной брус. Инструмент содержит множество гидроцилиндров, обеспечивающих поворотное движение между параллельными рамными элементами. Гидроцилиндры боковых секций представляют собой цилиндры с двухсторонним штоком. Гидроцилиндры центральной секции представляют собой цилиндры с односторонним штоком. Система включает в себя систему управления, предназначенную для перемещения цилиндров с двухсторонним штоком и перемещения цилиндров с односторонним штоком. Компьютеризированный способ управления инструментом включает в себя прием первого входного сигнала и прием второго входного сигнала. На основании первого входного сигнала выполняют поворот навесного бруса центральной секции инструмента в первом диапазоне рабочих углов. На основании второго входного сигнала выполняют вращение навесного бруса боковой секции на угол 90°. Снижается вес инструмента. 3 н. и 17 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Управляемое сельскохозяйственное приспособление с уравновешенным поворотным усилием
Комментарии