Способ управления устройством для закладки на хранение и/или извлечения из хранилища с плоским полом - RU2702938C2
Код документа: RU2702938C2
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Данное изобретение относится к способу управления устройством для закладки на хранение и/или извлечения, предназначенным для закладки на хранение и извлечения предмета хранения в хранилище с плоским полом, в котором предмет хранения размещен непосредственно на плоскости размещения предметов хранения.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве хранилища с плоским полом этого типа, как описано, например, в патентном первоисточнике 1, известно хранилище с плоским полом, включающее в себя плоскость размещения предметов хранения и устройство для закладки на хранение и/или извлечения, причем устройство для закладки на хранение и/или извлечения включает в себя поперечно перемещаемый в направлении Y элемент, который свободно перемещается горизонтально и поперечно на некоторой определенной высоте над плоскостью размещения предметов хранения, каретку, которая свободно перемещается горизонтально в направлении Х, перпендикулярно пересекающем направление Y, над поперечно перемещаемым в направлении Y элементом, и средство захвата предметов хранения, которое предусмотрено на каретке с возможностью свободного подъема и опускания, и при этом конфигурация устройства для закладки на хранение и извлечения обеспечивает осуществление закладки на хранение и/или извлечения предмета хранения между соответственными точками размещения предметов хранения, заданными на плоскости размещения предметов хранения.
ПЕРЕЧЕНЬ ЦИТИРУEМОЙ ЛИТЕРАТУРЫ
Патентная литература
[0003] Патентный первоисточник 1: Опубликованная не проходившая экспертизу заявка № 2008-262276 на патент Японии
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] Поскольку в хранилище с плоским полом, имеющем вышеописанную конфигурацию, предмет хранения размещают непосредственно на плоскости размещения предметов хранения, когда предполагается, что поперечное перемещение в направлении Y поперечно перемещаемого в направлении Y элемента и перемещение в направлении X каретки осуществляются в горизонтальной плоскости, непременное условие для безопасного и надежного осуществления действия захвата и/или освобождения от захвата с помощью средства захвата предметов хранения, которое опускается на заранее заданное расстояние опускания от каретки, находящейся на некоторой определенной высоте непосредственно над точкой размещения при хранении целевого предмета, подлежащего закладке на хранение и/или извлечению, заключается в том, что плоскость размещения предметов хранения должна быть горизонтальной. Вместе с тем, редко бывает так, что поверхность пола здания, используемая в качестве плоскости размещения предметов хранения, оказывается гарантировано горизонтальной с достаточной точностью по всей области обширной плоскости размещения предметов хранения, и когда строят хранилище с плоским полом, это обычно влечет за собой ремонтные работы для повышения точности горизонтальности поверхности пола здания, используемой в качестве плоскости размещения предметов хранения, в результате чего увеличивается стоимость всего сооружения.
Решение задачи
[0005] В данном изобретении предложен способ управления устройством для закладки на хранение и/или извлечения в хранилище с плоским полом, могущий поспособствовать решению традиционной проблемы, описанной выше, а для упрощения понимания взаимосвязи с вариантом осуществления, который будет описан позже, признак способа управления будет показан с приведением позиций, которые употребляются в описании варианта осуществления и которые заключены в скобках. В способе управления устройством для закладки на хранение и/или извлечения в хранилище с плоским полом, которое включает в себя плоскость (1) размещения предметов хранения и устройство (2) для закладки на хранение и/или извлечения, причем устройство (2) для закладки на хранение и/или извлечения включает в себя: поперечно перемещаемый в направлении Y элемент (3), который свободно перемещается горизонтально и поперечно в направлении Y на некоторой определенной высоте над плоскостью (1) размещения предметов хранения; каретку (5), которая свободно перемещается горизонтально в направлении Х, перпендикулярно пересекающем направление Y, на поперечно перемещаемом в направлении Y элементе (3); и средство (6) захвата предметов хранения, которое предусмотрено на каретке (5) с возможностью свободного подъема и опускания, и при этом устройство (2) для закладки на хранение и/или извлечения осуществляет закладку на хранение и извлечение предмета (C) хранения между устройством (2) для закладки на хранение и/или извлечения и соответственными точками (Cp) размещения предметов хранения, заданными на плоскости (1) размещения предметов хранения, признак способа управления заключается в том, что плоскость (1) размещения предметов хранения разделяют на множество элементарных площадок (A), а для каждой из элементарных площадок (A) измеряют и регистрируют разность высот плоскости (1) размещения предметов хранения относительно базовой плоскости, и когда проводят операцию закладки на хранение и/или извлечения с помощью устройства (2) для закладки на хранение и/или извлечения, расстояние опускания средства (6) захвата предметов хранения относительно каретки (5) корректируют по разности высот элементарной площадки (А), которой принадлежит точка (Cp) размещения предметов хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению.
Полезные эффекты изобретения
[0006] В способе управления хранилищем с плоским полом в соответствии с данным изобретением, даже когда во время операции закладки на хранение и/или извлечения имеется разность высот относительно базовой плоскости на участке плоской поверхности, где точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению, присутствует на плоскости размещения предметов хранения, средство захвата предметов хранения можно опускать на некоторую определенную высоту, если смотреть от участка плоской поверхности, где присутствует точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению. Иными словами, в случае, если участок плоской поверхности, где присутствует точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению, выше, чем базовая плоскость, предотвращается аномальное приближение опущенного средства захвата предметов хранения к этому участку плоской поверхности, а в противоположном случае, если участок плоской поверхности, где присутствует точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению, ниже, чем базовая плоскость, предотвращается аномальное перемещение опущенного средства захвата предметов хранения от этого участка плоской поверхности. Следовательно, это исключает возможность подачи предмета хранения в поперечном направлении во время действия освобождения от захвата, осуществляемого средством захвата предметов хранения, или падения с ударом об участок плоской поверхности, где присутствует точка размещения предмета хранения, так что предмет хранения уходит из надлежащего положения в результате осуществления действия освобождения от захвата средством захвата предметов хранения, в состоянии, в котором предмет хранения прижат к участку плоской поверхности, где присутствует точка размещения предмета хранения, во время операции закладки на хранение, или в противоположном состоянии, где предмет хранения не оперт на участок плоской поверхности, где присутствует точка размещения предмета хранения, во время операции закладки на хранение (т.е., предмет хранения при этом «плавает»), и оказывается возможным безопасное и надежное опускание предмета хранения в надлежащее положение. Кроме того, когда проводят операцию закладки на хранение и/или извлечения, это исключает возможность осуществления действия захвата средством захвата предметов хранения в положении, смещенном в направлении вверх-вниз из надлежащего положения предмета хранения, подлежащего извлечению, и поэтому оказывается возможным безопасное и надежное осуществление действия захвата и подъема предмета хранения.
[0007] Естественно, когда среди вертикальных расстояний, измеряемых - вплоть до плоскости размещения предметов хранения - средством измерения расстояний, для базовой плоскости задают максимальное значение, поскольку такая ситуация, в которой участок плоской поверхности, где присутствует точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению, оказывается ниже, чем базовая плоскость, больше не возникает, при коррекции расстояния опускания средства захвата предметов хранения, эту коррекцию проводят так, что расстояние опускания постоянно уменьшается на разность высот, измеряемых относительно эталонного значения для базовой плоскости. В отличие от этого, когда среди вертикальных расстояний, измеряемых - вплоть до плоскости размещения предметов хранения - средством измерения расстояний, для базовой плоскости задают минимальное значение, поскольку такая ситуация, в которой участок плоской поверхности, где присутствует точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению, оказывается выше, чем базовая плоскость, больше не возникает, при коррекции расстояния опускания средства захвата предметов хранения, эту коррекцию проводят так, что расстояние опускания постоянно увеличивается на разность высот, измеряемых относительно эталонного значения для базовой плоскости. Вместе с тем, если ситуация такова, что разность высот относительно базовой плоскости значительно увеличивается, также невозможно, чтобы для базовой плоскости можно было бы задать некоторое промежуточное значение между максимальным значением и минимальным значением вертикального расстояния вплоть до плоскости размещения предметов хранения, измеряемого средством измерения расстояний.
[0008] Отметим, что если воплощение способа согласно данному изобретению в случае, где присутствие аномального участка плоской поверхности, такого, как локально поднятый участок или глубоко утопленный участок, визуально различимо в плоскости размещения предметов хранения, и в случае, где считается, что аномальный участок плоской поверхности может нарушить устойчивую опору предмета хранения, аномальный участок плоской поверхности, на котором вертикальное расстояние вплоть до плоскости размещения предметов хранения измеряется средством измерения расстояний, можно устранить из элементарных площадок и можно исключить из заданной области точки размещения предмета хранения на плоскости размещения предметов хранения. Когда размер элементарной площадки, на котором вертикальное расстояние вплоть до плоскости размещения предметов хранения измеряется средством измерения расстояний, уменьшается, можно точнее представить ситуацию неровности на плоскости размещения предметов хранения. Вместе с тем, количество раз проведения измерений увеличивается, и поэтому увеличиваются время и стоимость их проведения. Следовательно, в случае, где посредством визуального наблюдения ситуации неровности по всей плоскости размещения предметов хранения обнаруживается, что неровность оказывается существенно малой, размер элементарной площадки предпочтительно увеличивают, так что количество раз проведения измерений уменьшается, и поэтому время и стоимость их проведения уменьшаются.
[0009] Помимо этого, отдельные площадки не всегда должны иметь один и тот же размер по всей области плоскости размещения предметов хранения, и в зависимости от визуального наблюдения ситуации с неровностью на всей плоскости размещения предметов хранения, размер элементарной площадки для области, где степень неровности является высокой, можно увеличить, а размер элементарной площадки для области, где степень неровности является низкой, можно уменьшить. Естественно, может быть и так, что, независимо от ситуации визуального наблюдения неровности на всей плоскости размещения предметов хранения, на основе результатов вышеописанных измерений, проведенных в заранее заданных относительно больших элементарных площадках, размер элементарных площадок в некоторой конкретной области уменьшают, а измерения можно провести снова.
[0010] То есть, в результате измерения разности высот для каждой элементарной площадки относительно базовой плоскости, по отношению к некоторой конкретной элементарной площадки, в которой разность высот, равную некоторому заданному значению или превышающую его, измеряют в сравнении в разностями высот для других элементарных площадок, эту конкретную отдельную площадку дополнительно разделяют на множество малых площадок, для каждой из малых площадок снова измеряют разность высот, а когда в точке размещения предмета хранения, принадлежащей упомянутой конкретной элементарной площадки, осуществляют закладку на хранение и/или извлечение, расстояние опускания средства захвата предметов хранения относительно каретки можно корректировать по разности высот малой площадки, которой принадлежит точка размещения предмета хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению. В этом способе, независимо от ситуации визуального наблюдения неровности на всей плоскости размещения предметов хранения, после эффективного проведения измерений на всей плоскости размещения предметов хранения на основе заранее заданных относительно больших элементарных площадок, для конкретной элементарной площадки, идентифицированной на основе результатов измерений, подлежащий измерению размер площадки уменьшают, а измерения проводят снова. Следовательно, оптимальное «значение коррекции расстояния опускания средства захвата предметов хранения» для каждой из всех точек размещения предметов хранения на всей плоскости размещения предметов хранения можно получить, не уменьшая сначала размер всех элементарных площадок с проведением время емких измерений, в результате чего становится возможным безопасное и надежное осуществления операции закладки на хранение и/или извлечения предмета хранения.
[0011] В дополнение к этому, в случае воплощения способа управления согласно данному изобретению, можно предусмотреть средство измерения расстояний, которое перемещается в направлении Х вместе с кареткой устройства для закладки на хранение и/или извлечения, для каждой из элементарных площадок, на которые разделена плоскость размещения предметов хранения, и вертикальное расстояние вплоть до плоскости размещения предметов хранения измеряют средством измерения расстояний, а разность высот относительно базовой плоскости можно вычислить исходя из измеренного значения и зарегистрировать. В этом способе можно легко воплотить изобретение, лишь прикрепляя средство измерения расстояний к устройству хранения и извлечения, заключенному в хранилище с плоским полом.
[0012] В частности, хотя средство измерения расстояний можно также прикрепить к каретке устройства для закладки на хранение и/или извлечения, средство измерения расстояний крепят к нижнему концевому участку средства захвата предметов хранения, который оперт с возможностью свободного подъема и опускания относительно каретки, вследствие чего средство захвата предметов хранения опускается во время измерения, и поэтому измеряемое расстояние сокращается, в результате чего появляется возможность уменьшить погрешность, вносимую в измерение. Помимо этого, когда средство измерения расстояний крепится к несущему элементу (вместо этого можно использовать предмет хранения), захватываемому средством захвата предметов хранения, средство измерения расстояний можно крепить, воспользовавшись функцией захвата, которую имеет средство захвата предметов хранения, и больше не нужно предусматривать специальное устройство для крепления и удаления средства измерения расстояний, в результате чего появляется возможность облегчить воплощение изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
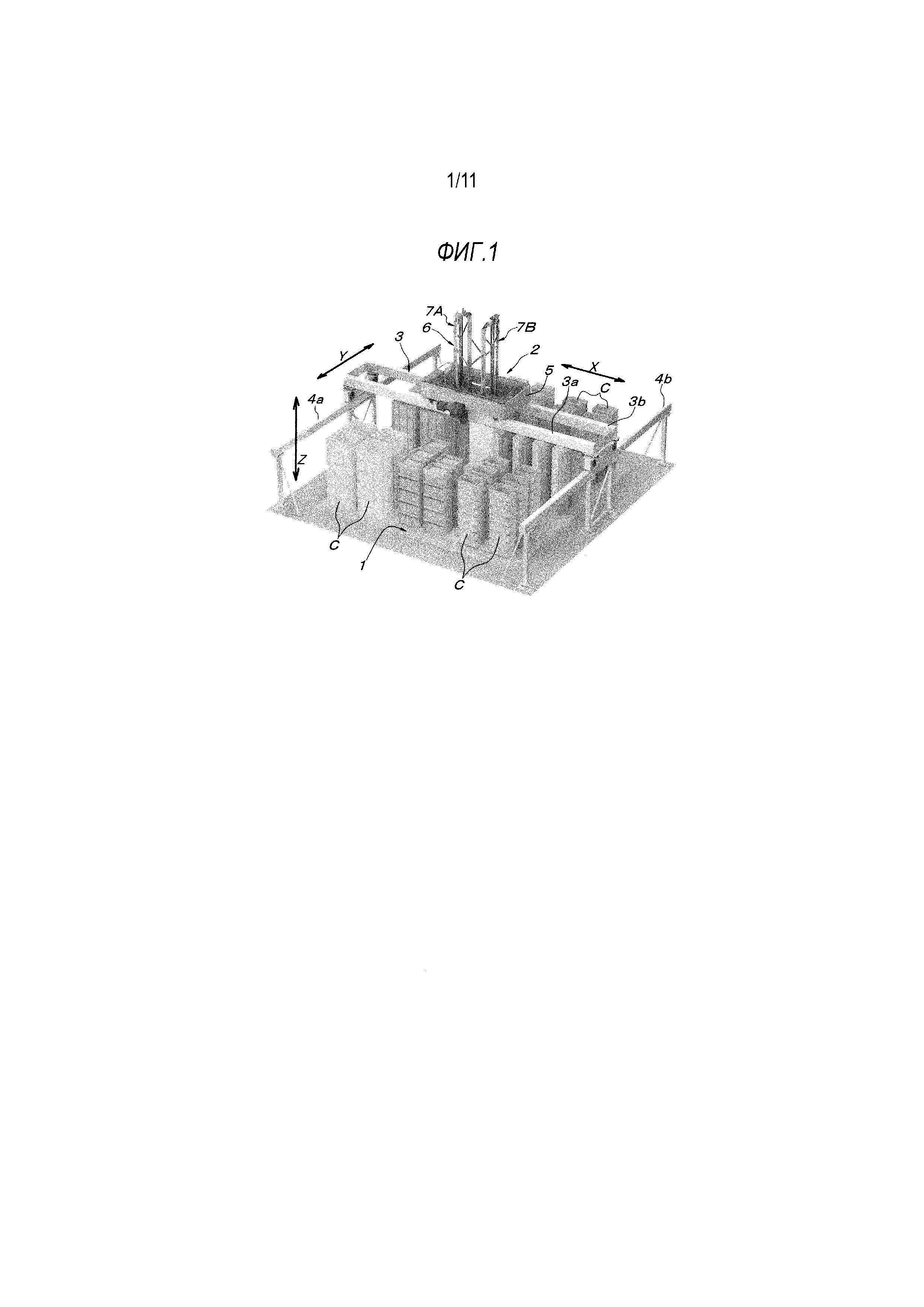
[0013] На фиг.1 представлено перспективное изображение, иллюстрирующее пример конфигурации всего хранилища в целом.
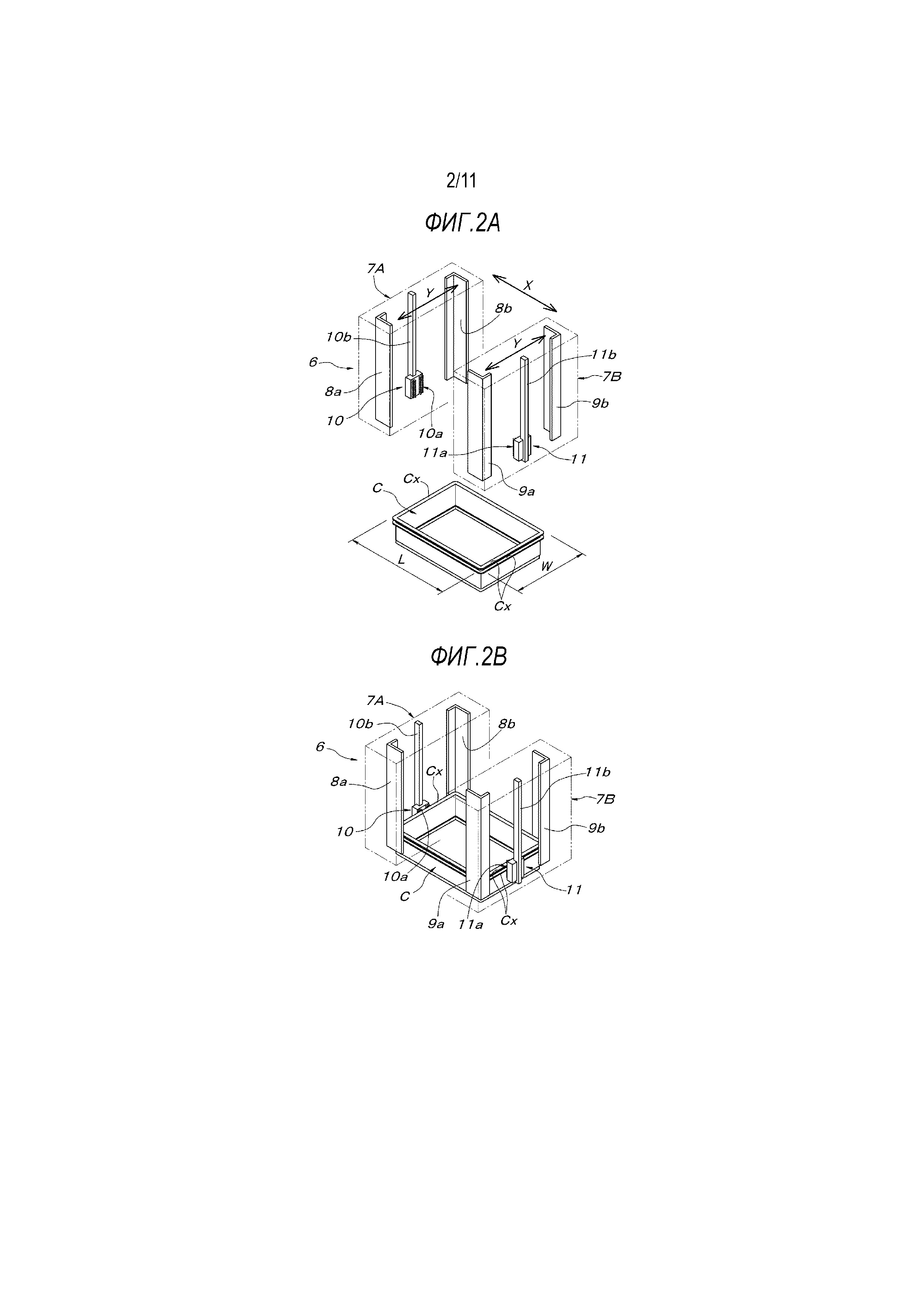
На фиг.2A представлено перспективное изображение, иллюстрирующее средство захвата предметов хранения устройства для закладки на хранение и/или извлечения и предмет хранения в хранилище, а на фиг.2B представлено перспективное изображение, иллюстрирующее состояние, в котором средство захвата предметов хранения захватывает предмет хранения.
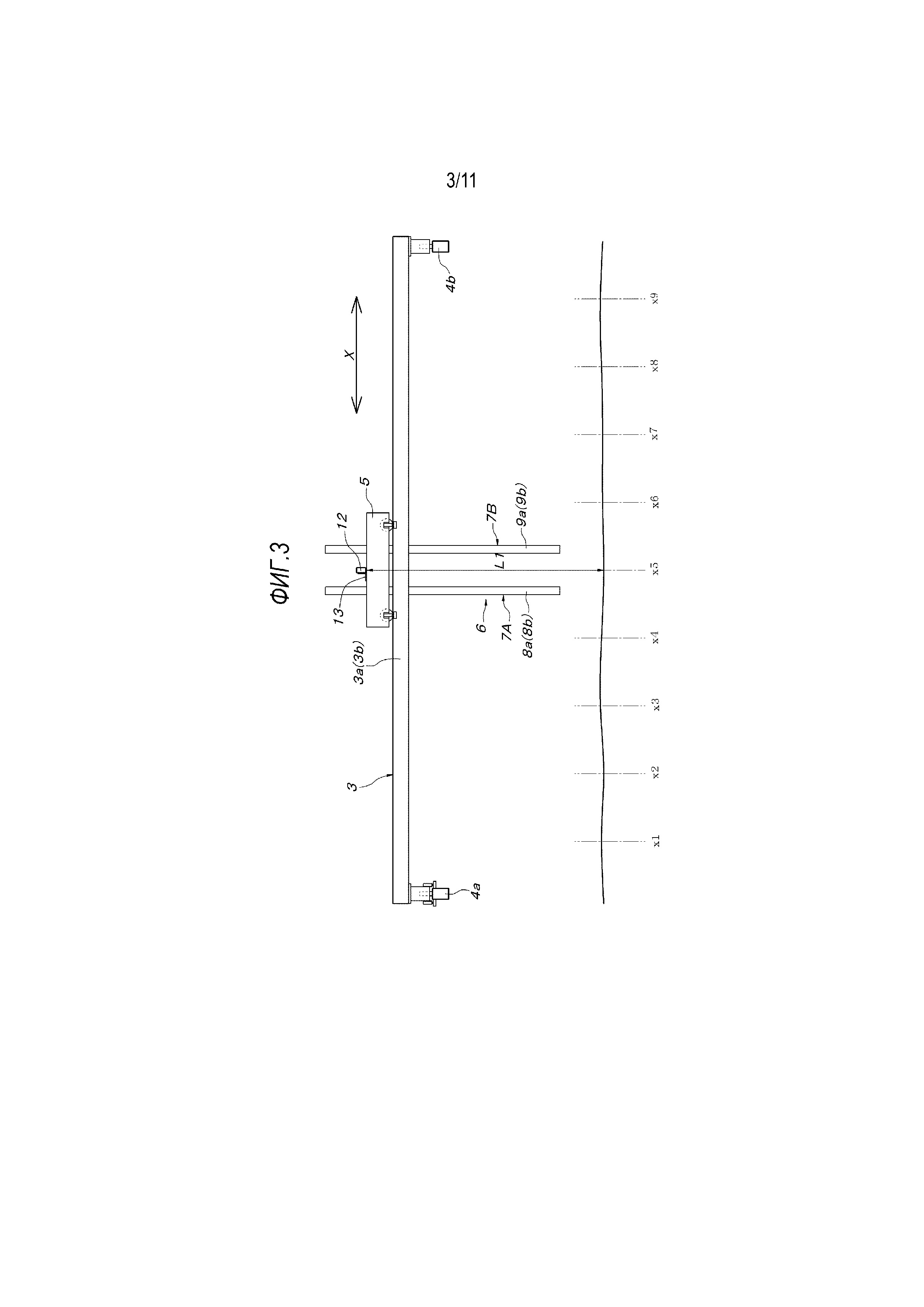
На фиг.3 представлены вид спереди, иллюстрирующий вариант осуществления, в котором средство измерения расстояний крепится к каретке устройства для закладки на хранение и/или извлечения, и состояние, в котором измеряют вертикальное расстояние вплоть до плоскости размещения предметов хранения.
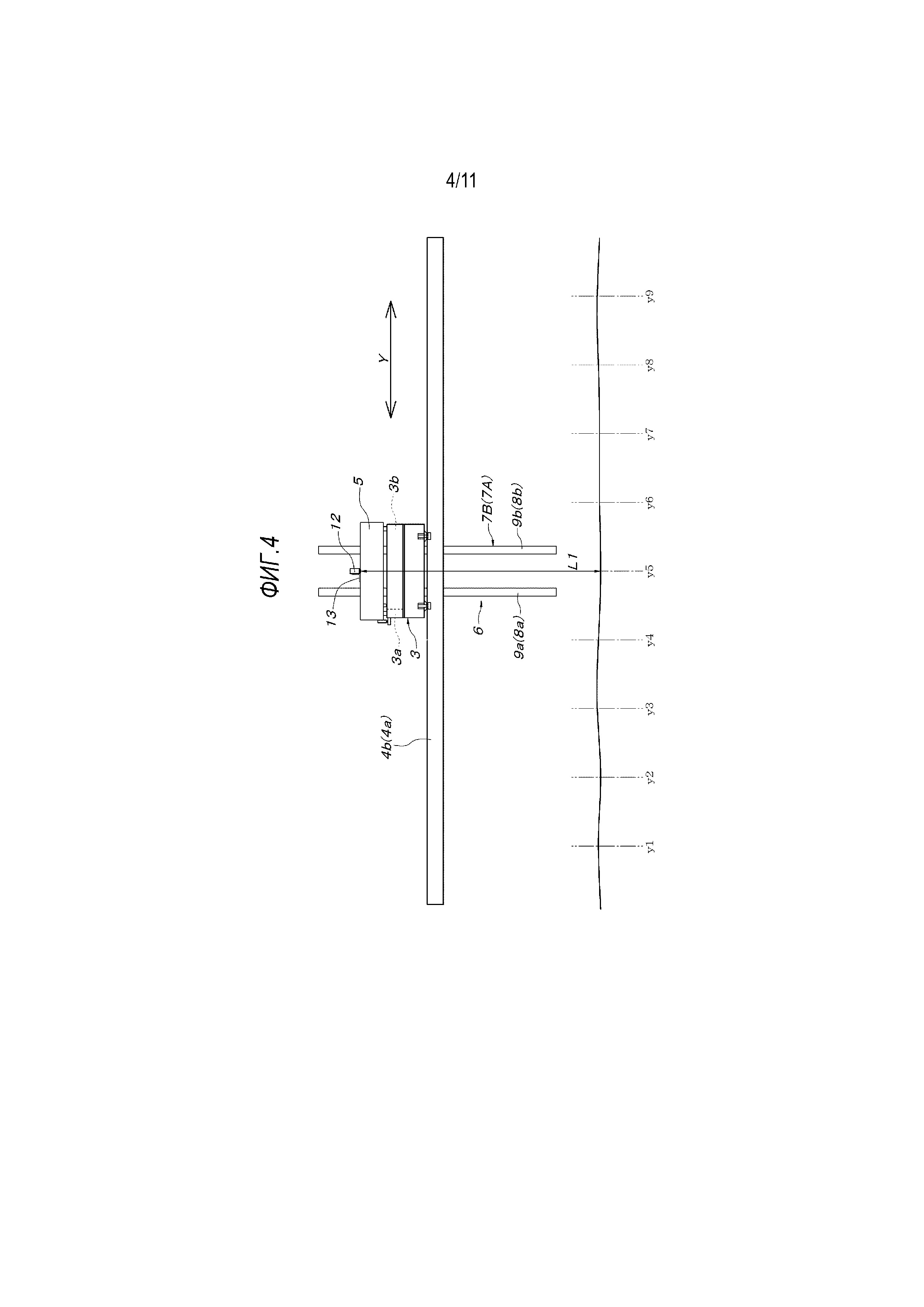
На фиг.4 представлен вид сбоку согласно фиг.3.
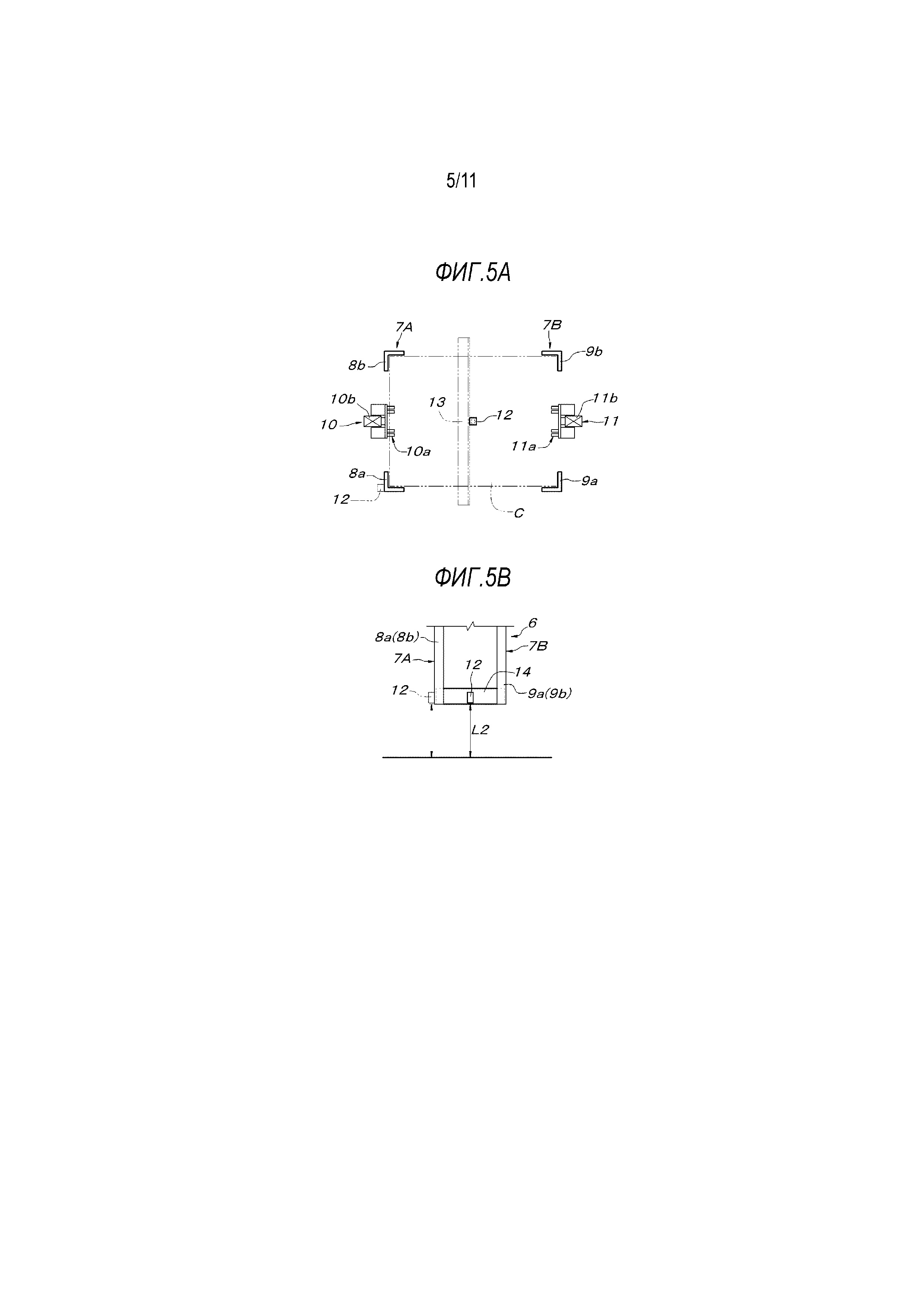
На фиг.5A представлен вид в плане, иллюстрирующий узел крепления средства измерения расстояний, а на фиг.5B представлен вид сбоку, иллюстрирующий еще один узел крепления средства измерения расстояний.
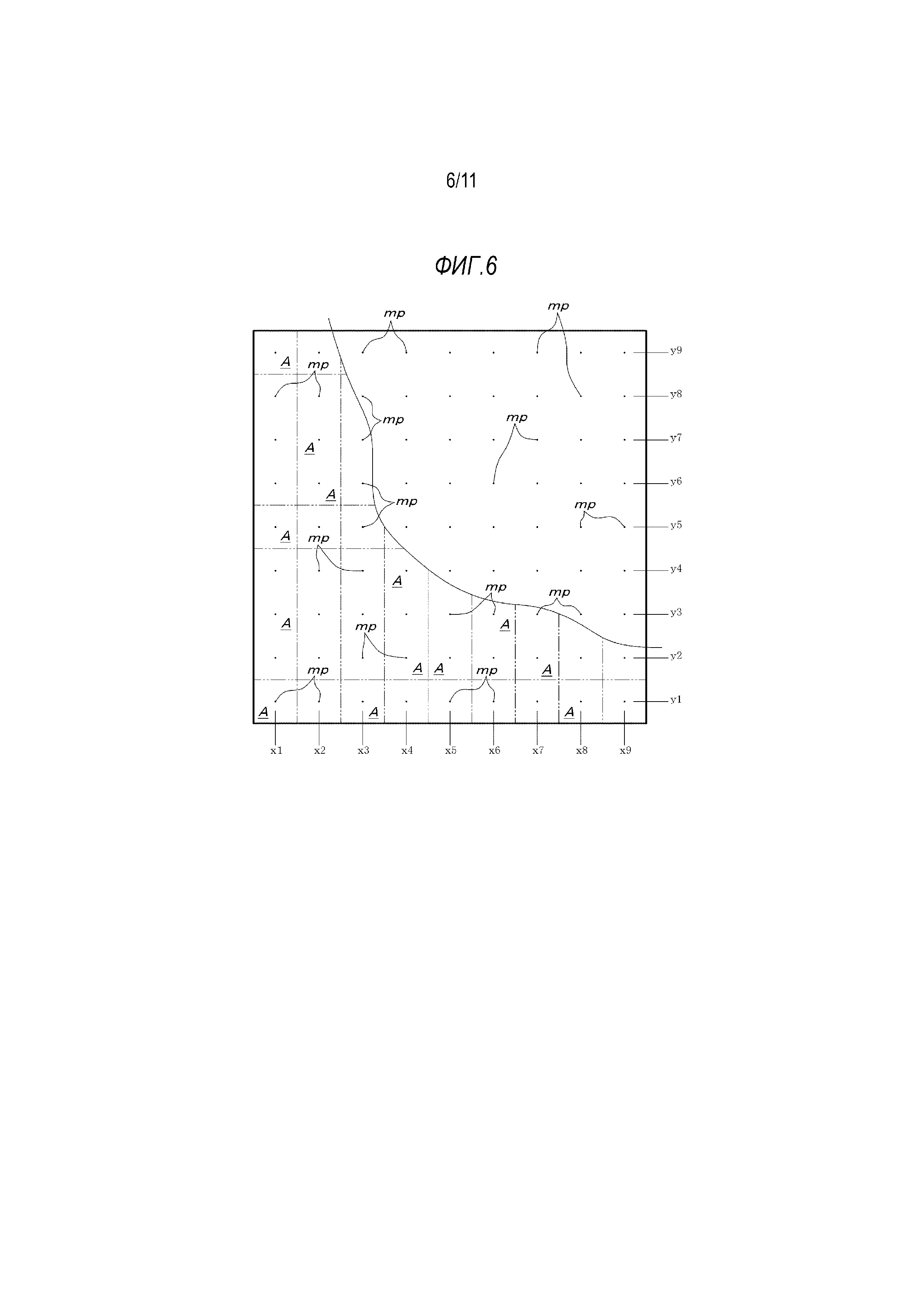
На фиг.6 представлен вид в плане, иллюстрирующий точки измерения вертикального расстояния на плоскости размещения предметов хранения.
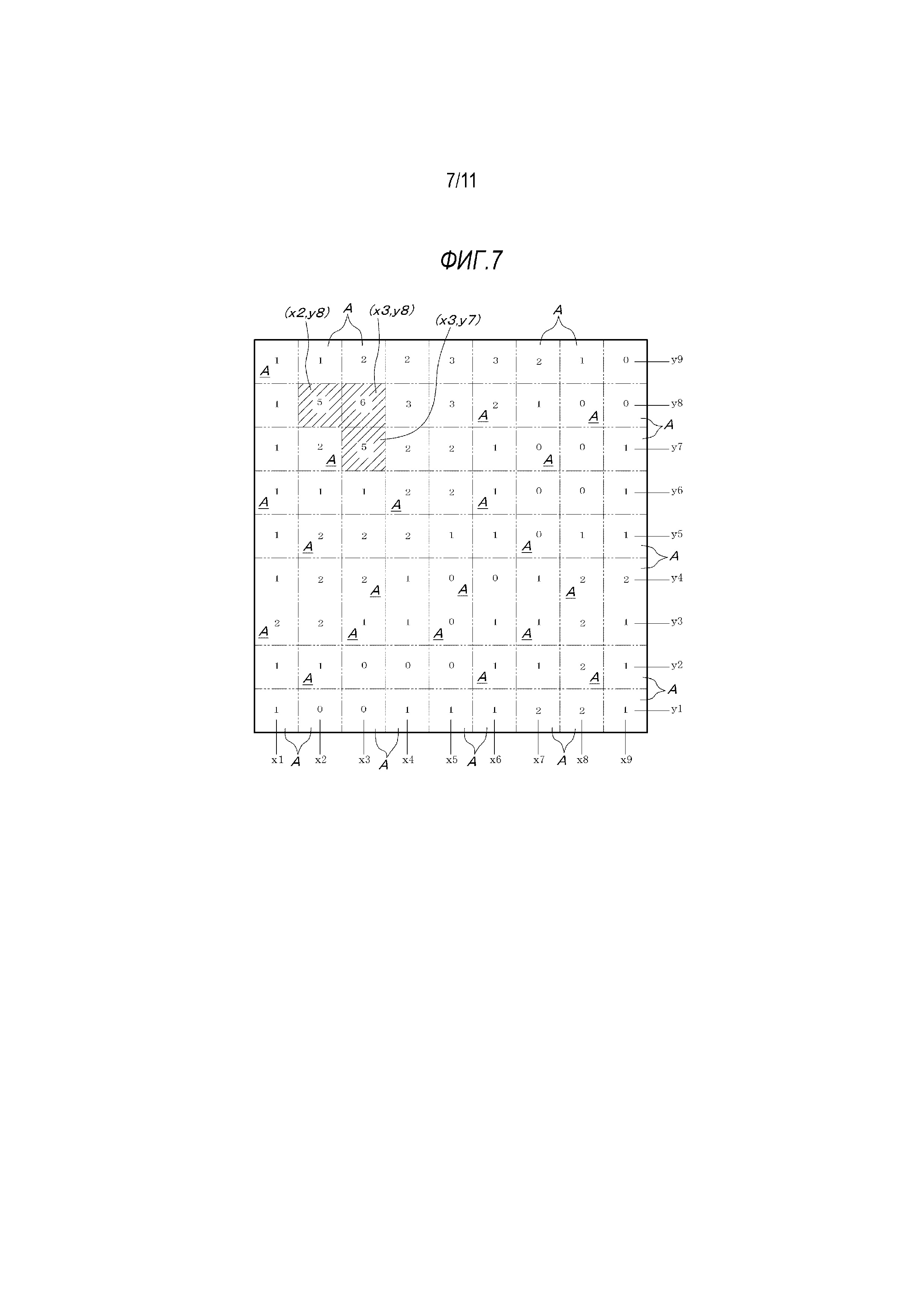
На фиг.7 представлен вид в плане, иллюстрирующий результаты измерения.
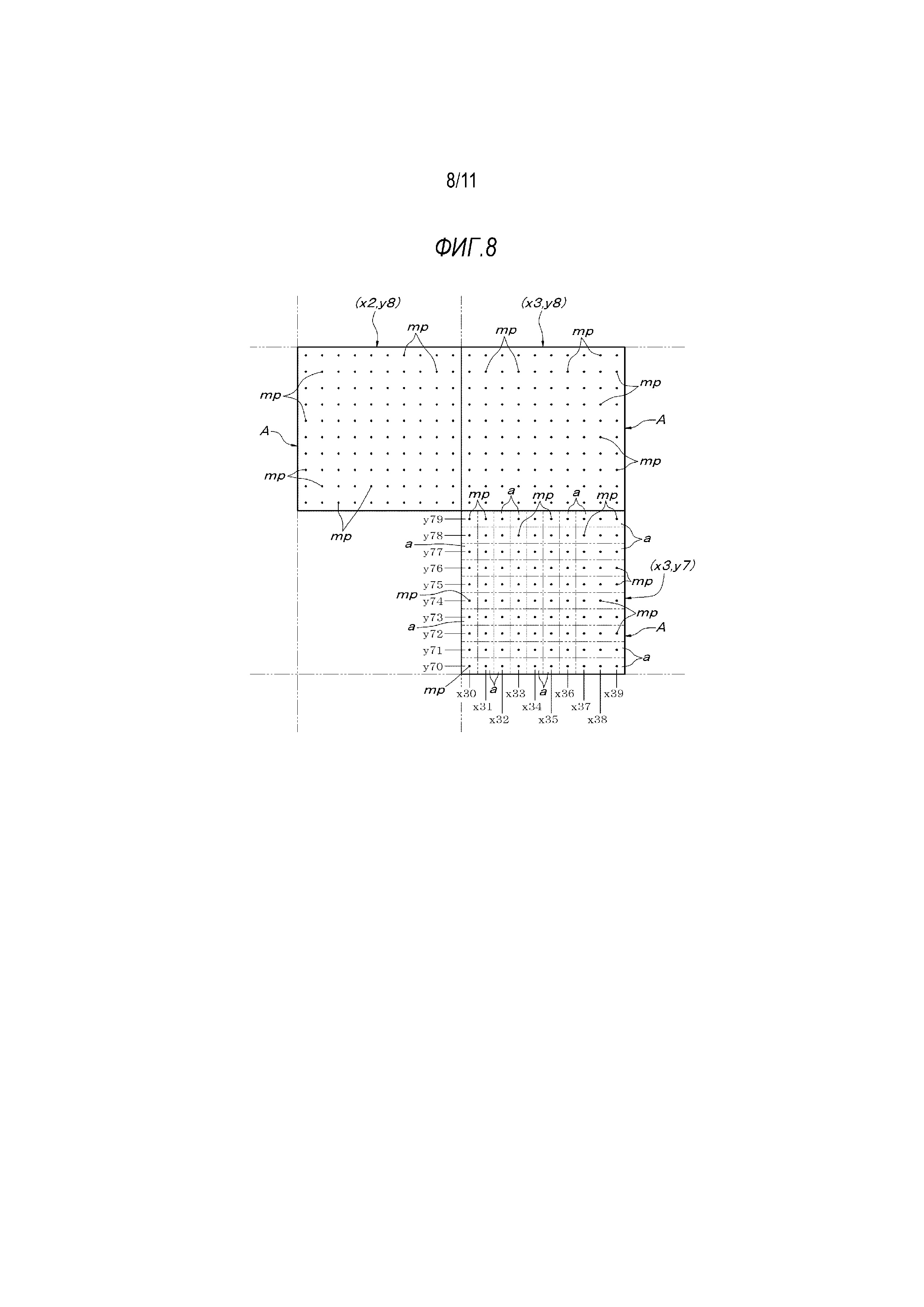
На фиг.8 представлен в увеличенном масштабе вид в плане основного участка, иллюстрирующий присутствие конкретных элементарных площадок на плоскости размещения предметов хранения.
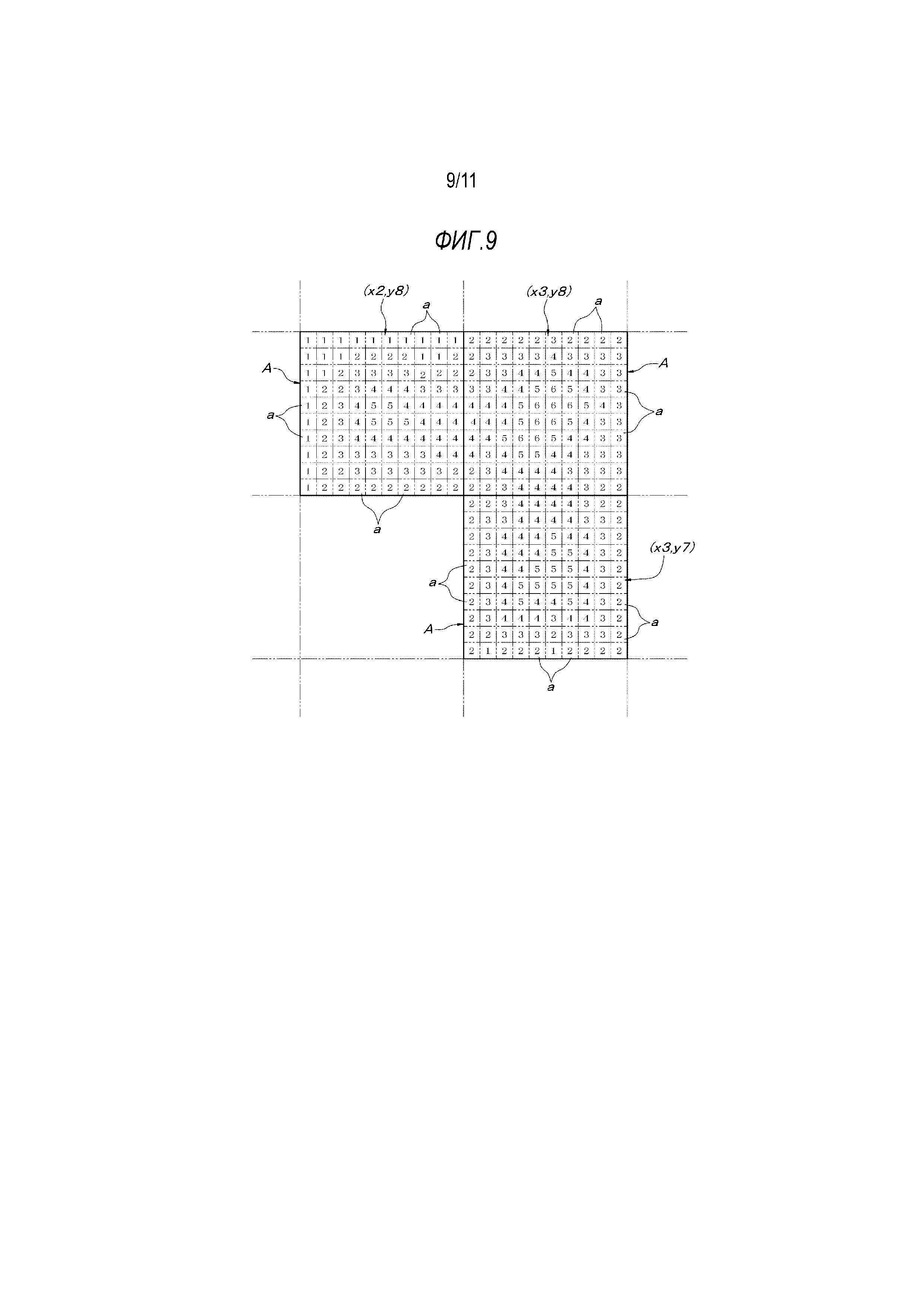
На фиг.9 представлен вид в плане, иллюстрирующий результаты измерения для конкретных элементарных площадок согласно фиг.8.
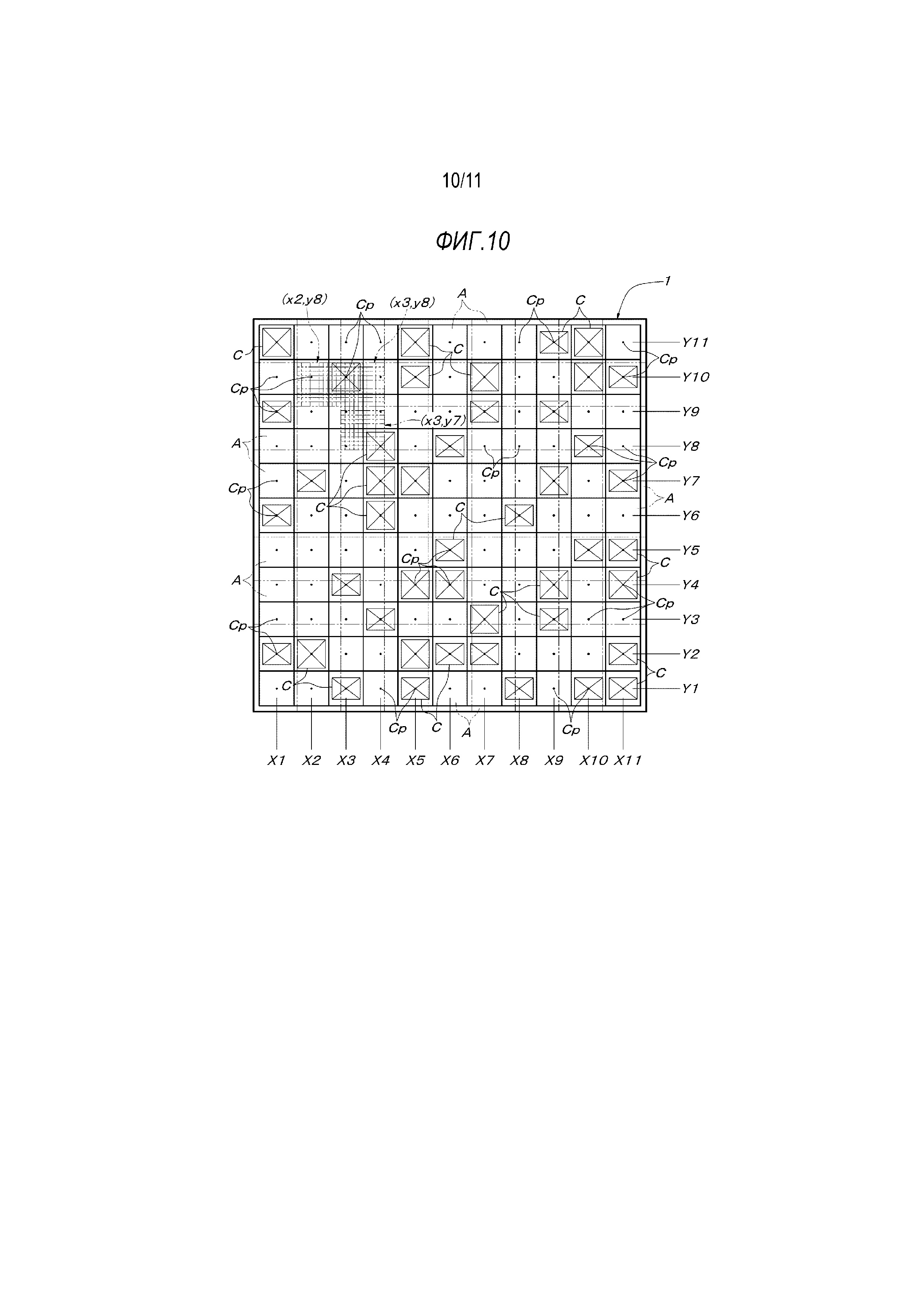
На фиг.10 представлен вид в плане, иллюстрирующий точки размещения предметов хранения на плоскости размещения предметов хранения.
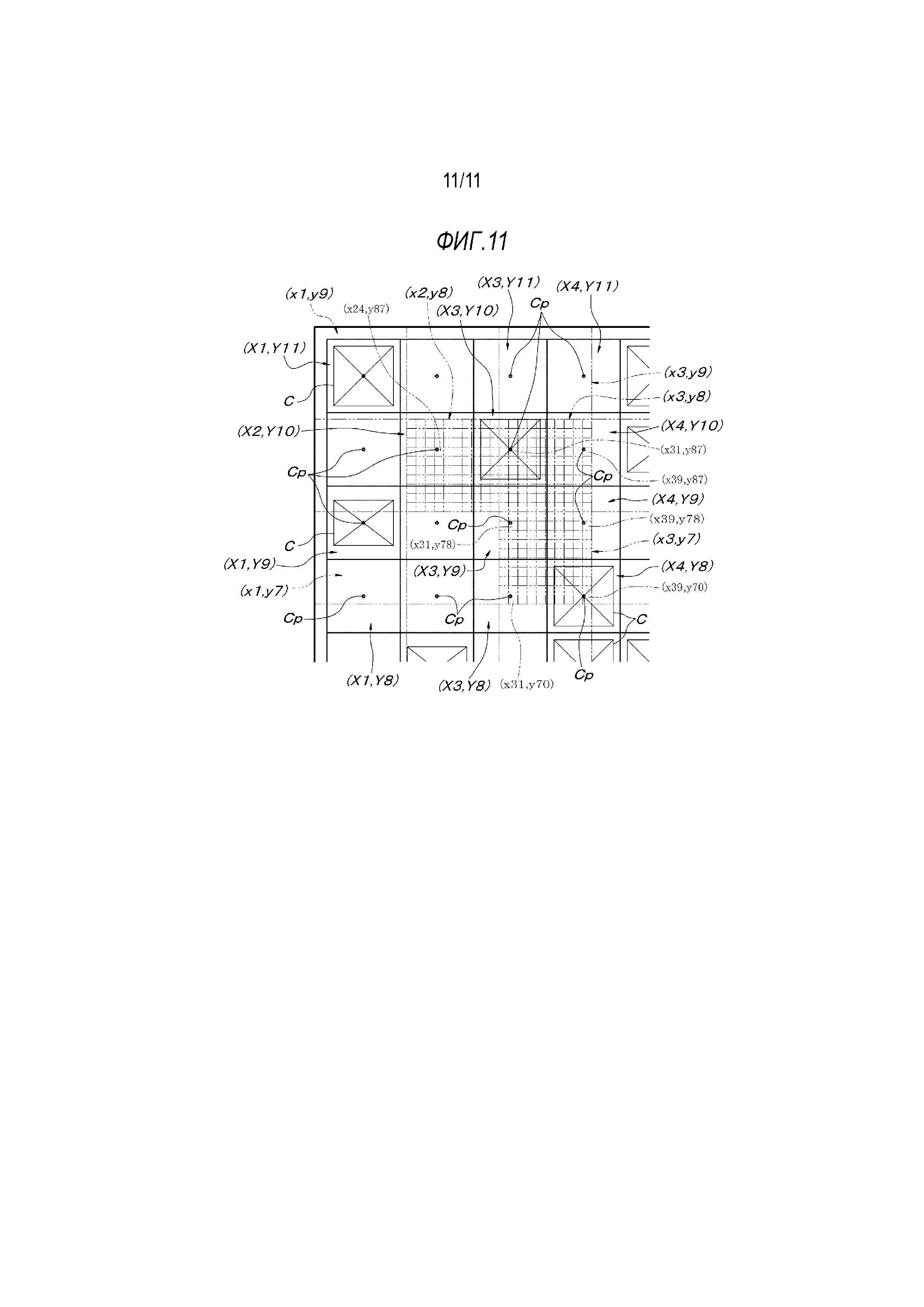
На фиг.11 представлен в увеличенном масштабе частичный вид согласно фиг.10.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0014] На фиг.1, позиция 1 обозначает плоскость размещения прямоугольных предметов хранения, а позиция 2 обозначает устройство для закладки на хранение и/или извлечения. Позиция 3 обозначает поперечно перемещаемый в направлении Y элемент, и этот поперечно перемещаемый в направлении Y элемент 3 включает в себя две направляющие 3a и 3b, параллельные направлению Х (направлению влево-вправо). Позиции 4a и 4b обозначают пару неподвижных направляющих, которые расположены параллельно направлению Y с обеих боковых сторон плоскости 1 размещения предметов хранения в направлении Х, и эта пара неподвижных направляющих 4a и 4b служат опорами обоим концевым участкам поперечно перемещаемого в направлении Y элемента 3 в направлении Х, так что поперечно перемещаемый в направлении Y элемент 3 свободно перемещается параллельно направлению Y (направлению вперед-назад) на некоторой определенной высоте над плоскостью 1 размещения предметов хранения. Конфигурация устройства 2 для закладки на хранение и/или извлечения предусматривает наличие каретки 5, которая опирается посредством двух направляющих 3a и 3b на поперечно перемещаемый в направлении Y элемент 3 таким образом, что оказывается свободно перемещаемой в направлении Х, и наличие средства 6 захвата предметов хранения, которое опирается посредством каретки 5 с возможностью свободного подъема и опускания.
[0015] Хотя в качестве средства 6 захвата предметов хранения можно рассмотреть средства различных типов, конфигурация которых совместима с предметами хранения, манипуляции которыми требуются, средство 6 захвата предметов хранения в этом варианте осуществления включает в себя действующую в направлении Х пару блоков 7A и 7B захвата, так что блоки 7A и 7B захвата свободно перемещаются, сближаясь друг с другом и отдаляясь друг от друга, в направлении Х. Оба блока 7A и 7B захвата опираются на каретку 5, поднимаясь и опускаясь между двумя направляющими 3a и 3b поперечно перемещаемого в направлении Y элемента 3 и свободно поднимаясь и опускаясь синхронно друг с другом, и включают в себя действующие в направлении Y пары захватывающих столбчатых элементов 8a-9b и поднимающих приспособлений 10 и 11, находящихся в центральном положении между захватывающими столбчатыми элементами 8a и 8b и в центральном положении между захватывающими столбчатыми элементами 9a и 9b. Предмет C хранения, которым манипулируют, в этом варианте осуществления представляет собой прямоугольный пластмассовый транспортировочный контейнер, который имеет в плане ширину W в направлении Y и длину L в направлении Х, а также включает в себя на его наружной поверхности выступающее ребро Сх жесткости, которое непрерывно по всей периферии контейнера.
[0016] Соответственные захватывающие столбчатые элементы 8a-9b представляют собой столбчатые элементы, которые можно устанавливать снаружи на четыре угла предмета C хранения и горизонтальному поперечному сечению которых придана форма буквы L, а в поднимающих приспособлениях 10 и 11, по меньшей мере, на внутренних сторонах нижних концевых участков поднимающих и опускающих столбчатых элементов 10b и 11b предусмотрены вводимые в зацепление приспособления 10a и 11a, которые свободно вводятся в зацепление и выводятся из зацепления с выступающим ребром Сх жесткости в центральных положениях с обеих сторон предмета C хранения, параллельных направлению Y. Вводимые в зацепление приспособления 10a и 11a включают в себя большое количество пальцев, которые выступают из вертикальных прямоугольных поверхностей, параллельных направлению Y, и которые параллельны направлению Х, а соответственные пальцы удерживаются в положении выступания, где пальцы выдвигаются внутрь пружинами.
[0017] В соответствии с хранилищем, имеющим вышеописанную конфигурацию, за счет поперечного перемещения поперечно перемещаемого в направлении Y элемента 3 в направлении Y и перемещения каретки 5 на поперечном перемещаемом в направлении Y элементе 3 в направлении Х, средство 6 захвата предметов хранения можно перемещать на определенную высоту над желаемым положением (включая транспортный завершающий концевой участок транспортера-накопителя и транспортный начальный концевой участок извлекающего транспортера, хотя это и не показано на чертеже) на плоскости 1 размещения предметов хранения. С другой стороны, средство 6 захвата предметов C хранения можно переключать между состоянием освобождения от действия захвата и состоянием действия захвата. В состоянии освобождения от действия захвата средством 6 захвата предметов хранения, блоки 7A и 7B захвата находятся в предельном положении отвода в направлении Х, в котором блоки 7A и 7B захвата отделены друг от друга в направлении Х, а захватывающие столбчатые элементы 8a, 8b, 9a и 9b находятся в предельном положении отвода в направлении Y, в котором захватывающие столбчатые элементы 8a, 8b, 9a, и 9b отделены друг от друга в направлении Y относительно поднимающих приспособлений 10 и 11, находящихся в своих соответственных центральных положениях. В состоянии действия захвата средствами 6 захвата предметов хранения, блоки 7A и 7B захвата перемещаются вплоть до достижения расстояния, соответствующего длине L в направлении X предмета C хранения, сближаясь друг с другом в направлении Х, а соответственные захватывающие столбчатые элементы 8a, 8b, 9a и 9b одновременно перемещаются вплоть до достижения расстояния, соответствующего ширине W в направлении Y предмета C хранения, сближаясь друг с другом в направление Y относительно поднимающих приспособлений 10 и 11, находящихся в своих соответственных центральных положениях, и, как показано на фиг.2B, четыре захватывающих столбчатых элемента 8a-9b установлены снаружи на четыре угла предмета C хранения, позиционируя предмет C хранения, а соответственные вводимые в зацепление приспособления 10a и 11a пары поднимающих приспособлений 10 и 11 одновременно вводятся в зацепление с выступающим ребром Сх жесткости на наружной поверхности предмета C хранения параллельно направлению Y. В состоянии, в котором вводимые в зацепление приспособления 10a и 11a введены в зацепление с выступающим ребром Сх жесткости на предмете C хранения, по меньшей мере, два пальца на одной и той же высоте в положении выступания в соответственно вводимых в зацепление приспособлениях 10a и 11a входят в нижнюю сторону выступающего ребра Сх жесткости на предмете C хранения, а пальцы, которые наталкиваются на выступающее ребро Сх жесткости, переходят в состояние, в котором они отводятся, противодействуя отклоняющей силе.
[0018] Когда предмет C хранения транспортируется средством 6 захвата предметов хранения, средство 6 захвата предметов хранения перемещается в положение непосредственно над предметом C хранения, подлежащим извлечению, за счет поперечного перемещения поперечно перемещаемого в направлении Y элемента 3 в направлении Y и перемещения каретки 5 на поперечно перемещаемом в направлении Y элементе 3 в направлении Х. Затем, блоки 7A и 7B захвата средства 6 захвата предметов хранения в состоянии освобождения от действия захвата опускаются до высоты предмета C хранения, подлежащего извлечению, относительно каретки 5, а после этого средство 6 захвата предметов хранения переключается в состояние действия захвата. И поэтому, как показано на фиг.2B, четыре захватывающих столбчатых элемента 8a-9b устанавливаются сверху на четыре угла предмета C хранения, позиционируя предмет C хранения, а соответственные вводимые в зацепление приспособления 10a и 11a пары поднимающих приспособлений 10 и 11 одновременно вводятся в зацепление с выступающим ребром Сх жесткости на предмете C хранения, после чего средство 6 захвата предметов хранения в состоянии действия захвата поднимается на предельную высоту подъема относительно каретки 5 или на такую высоту, на которой нет помех горизонтальной транспортировке предмета C хранения.
[0019] Предмет C хранения, подлежащий извлечению, поднимают на заранее определенную высоту, как описано выше, после чего предмет C хранения, захваченный средством 6 захвата предметов хранения, горизонтально транспортируют в целевое положение опускания путем поперечного перемещения поперечно перемещаемого в направлении Y элемента 3 в направлении Y и перемещения каретки 5 на поперечно перемещаемом в направлении Y элементе 3 в направлении Х. Поперечное перемещение поперечно перемещаемого в направлении Y элемента 3 и перемещение каретки 5 можно осуществлять одновременно с процессом подъема предмета C хранения, подлежащего извлечению, на заранее определенную высоту. После этого, средство 6 захвата предметов хранения, захватывающее предмет C хранения, опускают на заранее определенную высоту относительно каретки 5, предмет C хранения, захваченный средством 6 захвата предметов хранения, опускают в целевое положение, а потом средство 6 захвата предметов хранения в состоянии действия захвата переключают в состояние освобождения от действия захвата, чтобы высвободить предмет C хранения из средства 6 захвата предметов хранения, и процесс опускания предмета C хранения в целевое положение завершается. После этого, средство 6 захвата предметов хранения в состоянием освобождения от действия захвата поднимают на заранее определенную высоту относительно каретки 5, и таким образом последовательность этапов транспортировки с поднятием предмета хранения завершается.
[0020] Отметим, что когда предметы С хранения можно штабелировать, множество предметов С хранения в штабелированном состоянии можно вместе поднимать и транспортировать за счет действия захвата средством 6 захвата предметов хранения, прикладываемого к самому нижнему предмету С хранения. Хотя в этот момент поднимающие приспособления 10 и 11 средства 6 захвата предметов хранения поднимают только самый нижний предмет С хранения, поскольку четыре угла всех предметов C хранения в штабелированном состоянии, включая самый нижний предмет С хранения, позиционируются четырьмя захватывающими столбчатыми элементами 8a-9b, штабелированное состояние устойчиво поддерживается. Само собой разумеется, что для манипулирования большим количеством штабелированных предметов хранения, в поднимающих приспособлениях 10 и 11 вводимые в зацепление приспособления 10a и 11a также можно выполнить вертикальными во множестве каскадов поднимающих и опускающих столбчатых элементов 10b и 11b. За счет срабатывания средства 6 захвата предметов хранения, можно также транспортировать наружу только некоторый конкретный предмет С хранения среди множества предметов С хранения в штабелированном состоянии и снова штабелировать еще один предмет С хранения на предмет C хранения, штабелированный на плоскости 1 размещения предметов хранения.
[0021] Хотя хранилище можно использовать вышеописанным образом, перед тем, как действительно задействовать хранилище, проводят следующую операцию измерения и/или задания. То есть, как показано на фиг.3, 4, и 5A, чтобы осуществить операцию измерения и/или задания, средство 12 измерения расстояний, предназначенное для измерения вертикального расстояния вплоть до плоскости 1 размещения предметов хранения временно прикрепляют к каретке 5. Конкретно, несущий элемент 13, в котором средство 12 измерения расстояний крепится к центральному участку в направлении длины таким образом, что оказывается обращенным вниз, уложен с возможностью прикрепления и/или открепления на каретку 5 так, что вертикальная центральная линия четырехугольника, окруженного четырьмя захватывающими столбчатыми элементами 8a-9b, согласуется со средством 12 измерения расстояний. Как показано на фиг.5B, вместо крепления средства 12 измерения расстояний к каретке 5, как описано выше применительно к предмету C хранения, средство 12 измерения расстояний крепится в центральном положении на плоской поверхности несущего элемента 14, который может быть захвачен средством 6 захвата предметов хранения и который является прямоугольным в плане, будучи обращенным вниз, а когда осуществляют операцию измерения и/или задания, как с предметом C хранения, несущий элемент 14 можно захватывать посредством нижнего концевого участка (нижних концевых участков четырех захватывающих столбчатых элементов 8a-9b) средства 6 захвата предметов хранения. Естественно, вместо этого в качестве несущего элемента 14 можно использовать сам предмет C хранения. Кроме того, в зависимости от конкретного случая, как обозначено воображаемыми линиями на фиг.5B, средство 12 измерения расстояний можно крепить с возможностью подсоединения и/или отсоединения к произвольно выбранному одному из четырех захватывающих столбчатых элементов 8a-9b, чтобы оно оказалось обращенным вниз. В качестве средства 12 измерения расстояний, можно использовать обычные известные средства различных типов, такие, как датчик расстояния, использующий луч лазера или ультразвуковые волны, или механическое устройство для измерения расстояний. В качестве механического устройства для измерения расстояний, можно использовать, например, механическое устройство для измерения расстояний, имеющее основной корпус, который крепится к произвольно выбранному одному из несущих элементов 13 и 14 или четырех захватывающих столбчатых элементов 8a-9b, измерительный стержнеобразный элемент, который опирается на основной корпус с возможностью свободного вертикального подъема и опускания, и детектор, который крепится к основному корпусу для обнаружения расстояния опускания измерительного стержнеобразного элемента до тех пор, пока нижний конец измерительного стержнеобразного элемента не вступает в контакт с плоскостью 1 размещения предметов хранения.
[0022] С другой стороны, чтобы осуществить операцию измерения и/или задания, как показано на фиг.6, отдельные площадки A, которые скомпонованы в виде координатной сетки в направлении Х и направлении Y и которые представляют собой, например, квадрат со стороной 1 м, а точки mp измерения, каждая из которых находится в центре каждой из элементарных площадок A, заданы как воображаемые на плоскости 1 размещения предметов хранения. В примере согласно рассматриваемому чертежу, в качестве адресов заданы x1-x9 для направления Х и y1-y9 для направление Y, а значения координат X-Y, которые образованы комбинациями адресов для направления Х и адресов для направления Y, заданы в качестве абсолютных адресов для соответственных элементарных площадок A.
[0023] После сооружения хранилища с плоским полом, средство 12 измерения расстояний используют для осуществления операции измерения и/или задания. То есть, как показано на фиг.3 и 4, средство 12 измерения расстояний, которое перемещается вместе с кареткой 5, находится непосредственно над точкой mp измерения в центре одной элементарной площадки A за счет поперечного перемещения в направлении Y поперечно перемещаемого в направлении Y элемента 3 и перемещения в направлении X каретки 5 на поперечно перемещаемом в направлении Y элементе 3. В таком состоянии, вертикальное расстояние вплоть до точки mp измерения на плоскости 1 размещения предметов хранения измеряется средством 12 измерения расстояний, а значение измеренного вертикального расстояния регистрируется в соответствии с абсолютным адресом (значением координат X-Y) элементарной площадки A. Когда значения вертикального расстояния для всех элементарных площадок A на плоскости 1 размещения предметов хранения зарегистрированы таким образом, максимальное значение вертикального расстояния среди зарегистрированных вертикальных расстояний, иными словами, значение вертикального расстояния для элементарной площадки A, высота поверхности которой является наименьшей среди всех элементарных площадок A на плоскости 1 размещения предметов хранения, задают в качестве значения для базовой плоскости, а для всех остальных элементарных площадок A, разности между значениями измеренных вертикальных расстояний и значением для базовой плоскости вычисляют, например, в единицах мм и регистрируют их как разности высот относительно базовой плоскости в соответствии с абсолютными адресами (значениями координат X-Y) для всех элементарных площадок A.
[0024] На фиг.7, значения от 0 до 6, показанные в пределах отдельных элементарных площадок A обозначают разности высот отдельных элементарных площадок A относительно базовой плоскости в единицах мм, и обнаружено, что хотя в большинстве элементарных площадок A разности высот составляют примерно от 0 до +3 мм, разности высот для конкретных элементарных площадок A трех точек, абсолютными адресами которых являются (x2, y8), (x3, y7) и (x3, y8), составляют от +5 до +6 мм, за исключением заданного значения, например, 3 мм по сравнению с разностями высот для элементарных площадок A вокруг. Вместе с тем, взаимные разности высот для конкретных элементарных площадок A упомянутых трех точек не указывают, что все поверхности в пределах элементарных площадок A являются плоскими поверхностями, которые выше на 5-6 мм, а указывают, что точки mp измерения в центральных положениях в пределах элементарных площадок A демонстрируют увеличение высоты на такие значения. С другой стороны, поскольку в этом варианте осуществления размер элементарной площадки A значительно увеличивается по сравнению с планарным размером предмета C хранения, которым надлежит манипулировать (такого, как переносной пластмассовый коробчатый контейнер), доходя до квадрата со стороной 1 м, так что количество раз проведения измерений уменьшается, когда, как будет описано позже, в случае, если точки размещения предметов хранения, которые заданы на плоскости 1 размещения предметов хранения безотносительно элементарных площадок A, отстоят от соответственных центральных положений в пределах конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) упомянутых трех точек, фактические разности высот точек размещения предметов хранения не всегда являются результатами вышеописанных измерений и вычислений, которые составляют от +5 до +6 мм.
[0025] В случае таких ситуаций, снова проводят операцию измерения и/или задания, как описывается ниже, для конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) трех точек, имеющих аномальные разности высот. То есть, как показано на фиг.8, малые площадки «a», которые скомпонованы в виде координатной сетки в направлении Х и направлении Y в пределах соответственных конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) и которые представляют собой, например, квадрат со стороной 10 см, а точки mp измерения, каждая из которых находится в центре каждой из малых площадок «а» заданы как воображаемые. Тогда в точках mp измерения всех малых площадок «a» в пределах конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) трех точек проводят одну такую же операцию измерения и/или задания, как проводившаяся в элементарных площадках A, так что во всех малых площадках «a» в пределах конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) упомянутых трех точек вычисляются и задаются разности высот относительно базовой плоскости. На фиг.9, значения, показанные в пределах отдельных малых площадок «a» указывают разности высот для отдельных малых площадок «a» относительно базовой плоскости в единицах мм.
[0026] Отметим, что в случае, если посредством визуального наблюдения всей плоскости 1 размещения предметов хранения обнаружена некоторая конкретная область, в которой плоскость 1 размещения предметов хранения заметно поднята или утоплена, можно также задать вышеописанные малые площадки «a» для упомянутой конкретной области с самого начала, чтобы не проводить повторную операцию измерения и/или задания. Естественно, малые площадки «a» можно задавать на всей плоскости 1 размещения предметов хранения с самого начала и можно проводить операцию измерения и/или задания.
[0027] Когда вышеописанная операция измерения и/или задания завершена, как показано на фиг.10, точки Ср размещения предметов C хранения заданы на всей плоскости 1 размещения предметов хранения. Задание точек Ср размещения предметов C хранения проводят совершенно безотносительно элементарных площадок A и малых площадок «a», которые задаются как воображаемые для операции измерения и/или задания и которые обозначены воображаемыми линиями на фиг.10, и точку Ср размещения предмета Cp хранения задают в центре каждой площадки размещения предмета хранения в форме прямоугольника в плане, которые скомпонованы в виде координатной сетки в направлении Х и направление Y. Соответственные точки Ср размещения предметов C хранения представляют собой положения, в которых предметы С хранения опираются в состоянии, в котором точки Ср размещения предметов C хранения согласуются с центральными точками предметов C хранения на виде в плане, а в примере, проиллюстрированном на фиг.10, всем точкам Ср размещения значения предметов C хранения присваивают координаты X-Y, которые получены посредством комбинаций значений координаты в направлении X, составляющих от X1 до X11, и значений координаты в направлении Y, составляющих от Y1 до Y11, и которые идентифицируют положения на плоскости 1 размещения предметов хранения.
[0028] Для всех точек Ср размещения предметов C хранения, заданных так, как описано выше, задают значения коррекции расстояния опускания средства 6 захвата предметов хранения, когда с помощью средства 6 захвата предметов хранения проводят операцию закладки на хранение и/или извлечения предметов С хранения. То есть, поскольку все точки Ср размещения предметов C хранения принадлежат одной из элементарных площадок A, показанных на фиг.7, или одной из малых площадок «a» в пределах конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8), показанных на фиг.9, для каждого из точек Ср размещения предметов C хранения, значение коррекции расстояния опускания задают так, что оно оказывается равным разности высот (значению, показанному в каждой из элементарных площадок A на фиг.7, или значению, показанному в каждой из малых площадок «a» на фиг.9) относительно базовой плоскости, заданной для отдельной площадки A или малой площадки «a», которой принадлежит точка Ср размещения предметов C хранения. Как описано выше, поскольку в этом варианте осуществления задана разность высот, имеющая положительное (+) значение относительно самой нижней базовой плоскости, значение коррекции расстояния опускания для каждого из точек Ср размещения предметов C хранения представляет собой значение, которое получают путем уменьшения расстояние опускания средства 6 захвата предметов хранения на разность высот (положительное (+) значение), заданную для этой точки Ср размещения предмета C хранения. Теперь, со ссылками на фиг.11, будет описан конкретный пример. Площадками размещения предметов хранения, имеющими точки Ср размещения предметов C хранения в пределах конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) согласно фиг.9, являются (X2, Y10), (X3, Y8), (X3, Y9), (X3, Y10), (X4, Y8), (X4, Y9) и (X4, Y10), а значения коррекции расстояния опускания, заданные для точек Ср размещения предметов C хранения в этих площадках размещения предметов хранения можно найти, обратившись к фиг.9:
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X2, Y10) размещения предметов хранения
= -3 мм для компенсации разности высот +3 мм в пределах малой площадки (x24, y87) в пределах конкретной элементарной площадки (x2, y8),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X3, Y8) размещения предметов хранения
= -1 мм для компенсации разности высот +1 мм на малой площадке (x31, y70) в пределах конкретной элементарной площадки (x3, y7),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X3, Y9) размещения предметов хранения
= -3 мм для компенсации разности высот +3 мм на малой площадке (x31, y78) в пределах конкретной элементарной площадки (x3, y7),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X3, Y10) размещения предметов хранения
= -3 мм для компенсации разности высот +3 мм на малой площадке (x31, y87) в пределах конкретной элементарной площадки (x3, y8),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X4, Y8) размещения предметов хранения
= -2 мм для компенсации разности высот +2 мм на малой площадке (x39, y70) в пределах конкретной элементарной площадки (x3, y7),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X4, Y9) размещения предметов хранения
= -2 мм для компенсации разности высот +2 мм на малой площадке (x39, y78) в пределах конкретной элементарной площадки (x3, y7),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X4, Y10) размещения предметов хранения
= -3 мм для компенсации разности высот +3 мм на малой площадке (x39, y87) в пределах конкретной элементарной площадки (x3, y8).
Относительно площадок размещения предметов хранения, имеющих точки Ср размещения предметов C хранения в пределах элементарных площадок A, отличающихся от конкретных элементарных площадок A (x2, y8), (x3, y7) и (x3, y8) согласно фиг.9, отметим, что отрицательное (-) значение для компенсации разности высот (значение, показанное на каждой из элементарных площадок A на фиг.7), заданное для отдельной площадки A, которой принадлежит точка Ср размещения предметов C хранения, представляет собой значение коррекции расстояния опускания. Несколько конкретных примеров будут приведены ниже со ссылками, например, на фиг.11:
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадках (X1, Y8) и (X1, Y9) размещения предметов хранения
= -1 мм для компенсации разности высот +1 мм, заданной для элементарной площадки (x1, y7),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадке (X1, Y11) размещения предметов хранения
= -1 мм для компенсации разности высот +1 мм, заданной для элементарной площадки (x1, y9),
значение коррекции расстояния опускания для точки Ср размещения предметов C хранения на площадках (X3, Y11) и (X4, Y11) размещения предметов хранения
= -2 мм для компенсации разности высот +2 мм, заданной для элементарной площадки (x3, y9).
[0029] Поскольку значения коррекции расстояния опускания заданы индивидуально для точек размещения Ср предметов C хранения во всех площадках размещения предметов хранения, заданных на плоскости 1 размещения предметов хранения, как описано выше, когда на самом деле проводят операцию закладки на хранение и/или извлечения, приводом опускания средства 6 захвата предметов хранения управляют так, что расстояние опускания средства 6 захвата предметов хранения уменьшается на значение коррекции расстояния опускания, заданное для точки Ср размещения предмета C хранения, который является целевым для закладки на хранение и/или извлечения. То есть, когда операцию закладки на хранение и/или извлечения проводят в точке Ср размещения предмета C хранения, в которой значение коррекции расстояния опускания задано составляющим 0 мм, расстояние опускания средства 6 захвата предметов хранения представляет собой эталонное значение, и на это расстояние можно опускать средство 6 захвата предметов хранения в положение на некоторой определенной высоте от верха базовой плоскости, имеющей разность высот, равную 0, то есть, положение, где можно надлежащим образом осуществить действие освобождения от захвата или действие захвата предмета хранения, и когда операцию закладки на хранение и/или извлечения проводят в точке Ср размещения предмета C хранения, в которой значение коррекции расстояния опускания задано составляющим -1 мм, расстояние опускания средства 6 захвата предметов хранения представляет собой эталонное значение, составляющее -1 мм, а когда операцию закладки на хранение и/или извлечения проводят в точке Ср размещения предметов хранения, в которой значение коррекции расстояния опускания задано составляющим -2 мм, расстояние опускания средства 6 захвата предметов хранения представляет собой эталонное значение, составляющее -2 мм. За счет применения значений коррекции расстояния опускания, средство 6 захвата предметов C хранения можно постоянно опускать в положение на некоторой определенной высоте от верха плоскости 1 размещения предметов хранения, где присутствует точка Ср размещения предмета C хранения, предназначенная для целевого предмета, подлежащего закладке на хранение и/или извлечению, в результате чего действие освобождения от захвата или действие захвата предмета C хранения можно постоянно проводить надлежащим образом с предметом хранения безотносительно неровности плоскости 1 размещения предметов хранения.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0030] Способ управления устройством для закладки на хранение и/или извлечения в хранилище с плоским полом в соответствии с данным изобретением представляет собой способ управления хранилищем с плоским полом, в котором для проведения операции закладки на хранение и/или извлечения предмета хранения относительно плоскости размещения предметов хранения используют двигающееся по потолку устройство кранового типа для закладки на хранение и/или извлечения, и этот способ можно использовать в качестве способа управления когда в качестве плоскости размещения предметов хранения используют, в частности, большую поверхность пола внутри сооружения и т.п.
ПЕРЕЧЕНЬ ПОЗИЦИЙ ЧЕРТЕЖЕЙ
[0031]
1 Плоскость размещения предметов хранения
2 Устройство для закладки на хранение и/или извлечения
3 Поперечно перемещаемый в направлении Y элемент
3a-4b Направляющая
5 Каретка
6 Средство захвата предметов хранения
7A, 7B Захватывающий блок
8a-9b Захватывающий столбчатый элемент
10, 11 Поднимающее приспособление
10a, 11a Вводимое в зацепление приспособление
10b, 11b Поднимающий и опускающий столбчатый элемент
12 Средство измерения расстояний
13, 14 Несущий элемент.
Реферат
Изобретение относится к области хранения предметов, а именно к устройствам для закладки на хранение и/или извлечения Для управления устройством для закладки на хранение и/или извлечения из хранилища с плоским полом, которое включает в себя плоскость размещения предметов хранения и устройство для закладки на хранение и/или извлечения. Устройство для закладки на хранение и/или извлечения включает в себя: поперечно перемещаемый в направлении Y элемент, каретку и средство захвата предметов хранения. Устройство для закладки на хранение и/или извлечения проводит операцию закладки на хранение и/или извлечения предмета хранения между устройством для закладки на хранение и/или извлечения и соответственными точками размещения предметов хранения, заданными на плоскости размещения предметов хранения. Разделяют плоскость размещения предметов хранения на множество элементарных площадок. Для каждой из элементарных площадок измеряют и регистрируют разность высот плоскости размещения предметов хранения относительно базовой плоскости. Проводят операцию закладки на хранение и/или извлечения с помощью устройства для закладки на хранение и/или извлечения. Достигается безопасность и надежность при захвате и/или освобождении с помощью средств захвата предметов хранения. 6 з.п. ф-лы, 13 ил.
Комментарии