Кран-штабелер с усовершенствованным механизмом скольжения - RU2704765C2
Код документа: RU2704765C2
Чертежи





Описание
Данное изобретение относится к крану-штабелеру с усовершенствованным механизмом скольжения и к хранилищу для хранения контейнеров пробирок с биологическим материалом, оснащенному упомянутым краном-штабелером.
Краны-штабелеры, также упрощенно именуемые штабелерами, применяются в настоящее время в большинстве различных областей промышленной автоматизации для автоматизированной транспортировки материалов различных типов внутри больших складов, а также для закладки материала в конкретные ячейки стеллажей, зачастую - на значительной высоте от земли, или выемки его из них.
Движение скольжения подвижной конструкции штабелера в известных технических решениях стимулируется, в частности, в процессе движений вдоль направления «y», за счет присутствия колес, которые адекватно сопровождают движение подвижной конструкции по дорожкам.
В связи с движением скольжения этого типа появляются проблемы, поскольку в определенных случаях может возникать недостаток точности или неустойчивость. Причиной этого может быть, например, присутствие трений во время движения скольжения, различных дисбалансов, обуславливаемых прогрессирующим износом колес со временем, загрязнений, оседающих на колесах, или - опять же - возможность отвинчивания крепежа между подвижной конструкцией и колесами.
Все отклонения в работе могут иметь серьезные последствия, такие, как останов штабелера во время его движения скольжения или сход колес с дорожек, чему способствует тот факт, что во время поступательного движения по дорожкам имеется заданный клиренс. Последний недостаток, естественно, может приводить к падению транспортируемого материала или даже переворачиванию штабелера.
Вышеописанные риски возникают в тем большей мере, чем выше штабелер, или если он предназначен конкретно для транспортировки тяжелых материалов или материалов, чувствительных к переворачиванию.
В патентной заявке AT505757 A4 описан кран-штабелер, предназначенный для загрузки и разгрузки рейки на ячейки стеллажа и выгрузки ее из них и снабженный телескопическим удлинителем. В частности, телескопический удлинитель содержит первую телескопическую секцию, соединяемую с краном-штабелером, и вторую телескопическую секцию, соединяемую c первой телескопической секцией. Следовательно, такое решение позволяет легко перемещать рейку во время операций загрузки и в упомянутые ячейки и выгрузки из них, но влечет за собой значительное механическое напряжение, когда вышеупомянутый телескопический удлинитель перемещает нагрузку, оказывающуюся консольной. Механическое напряжение лишь частично снижается посредством подходящих опорных роликов, которые снижают изгибающий момент, нагружающий второй участок телескопического удлинителя, а напряжение на первой секции удлинителя причиняет ущерб.
Обращаясь конкретно к области предприятий лабораторной автоматики, предназначенной для перемещения пробирок, содержащих образцы биологических материалов, отмечаем, что существует нарастающая потребность в удобном расположении охлаждаемых хранилищ в пределах предприятия. Такие хранилища позволяют хранить анализируемые биологические образцы в течение более длительного времени или более короткого времени таким образом, что они опять будут в наличии, когда предприятию потребуется повторение анализа посредством модулей, соединяемых с целью автоматизации. Поэтому потребность во все большем и большем пространстве хранилищ вынуждает использовать все более и более вместительные хранилища и предусматривать обязательное применение подходящих систем, обеспечивающих перемещение, например - того типа, которые соответствуют вышеупомянутым кранам-штабелерам, а вследствие этого к сложностям самих складских систем добавляются также вышеописанные проблемы, связанные с перемещением.
Задача данного изобретения состоит в том, чтобы разработать кран-штабелер с усовершенствованным механизмом скольжения, не страдающий вышеописанными проблемами, а в частности - наделенный повышенной устойчивостью и точностью, менее подверженный износу, трениям и механическим напряжениям любого типа, и поэтому не создающий никакого риска падения или переворачивания транспортируемого материала. Конкретное внимание следует уделить аспекту скольжения штабелера вдоль двух копланарных направлений «x» и «y».
Дополнительная задача данного изобретения состоит в том, чтобы разработать установку для хранения больших объемов пробирок в больших хранилищах и выемки пробирок из них, что гарантирует повышенный динамизм хранения/выемки (пропускную способность), гарантируя при этом точное перемещение контейнеров со сниженным износом.
Эти и другие задачи решаются посредством крана-штабелера для транспортировки и установки контейнеров пробирок с биологическими материалами в ячейки множества стеллажей хранилища и выемки этих контейнеров из упомянутых ячеек, причем хранилище предназначено для хранения упомянутых контейнеров пробирок с биологическими материалами, при этом упомянутый кран-штабелер способен перемещать контейнер биологических материалов в трех направлениях «x», «y» и «z» декартовых координат с целью достижения упомянутых ячеек и содержит:
первые направляющие средства вдоль направления «x», содержащие первую пару направляющих;
вторые направляющие средства вдоль направления «y», перпендикулярного направлению «x», содержащие, по меньшей мере, одну вторую пару направляющих;
подвижную конструкцию, содержащую первую каретку и вторую каретку, причем первая каретка способна скользить как единое целое со второй кареткой в направлении «x» и вдоль первой пары направляющих;
вторая пара направляющих является отдельной и независимой от первой каретки и от второй каретки,
первая каретка выполнена как единое целое с третьей парой направляющих для второй каретки, которые вносят вклад в образование вторых направляющих средств, когда упомянутая первая каретка расположена у второй пары направляющих, тем самым выравнивая третью пару направляющих со второй парой направляющих, а
с каждой из первой каретки и второй каретки соединена как единое целое с ней, по меньшей мере, одна пара механизмов, расположенных вдоль соответствующих концов, вторая каретка способна скользить независимо от и освобождаться от первой каретки вдоль вторых направляющих средств в направлении «y» за счет поступательного движения механизмов скольжения второй каретки от третьей пары направляющих ко второй паре направляющих, и наоборот.
Вследствие этого, взаимодействие между второй парой направляющих и третьей парой направляющих позволяет получить повышенную устойчивость и точность перемещений, тем самым минимизируя трения и механические напряжения во время независимого перемещения второй каретки. Более того, возможность независимого движения первой и второй каретки позволяет получить облегчение нагрузки в процессе поступательного движения, а значит - меньший износ и меньшее механическое напряжение.
Термин «направление x» в данном изобретении означает направление скольжения вдоль оси в плоскости из группы плоскостей, параллельных опорной плоскости крана-штабелера.
Термин «направление y» в данном изобретении означает направление скольжения вдоль оси в плоскости из группы плоскостей, параллельных опорной плоскости крана-штабелера и перпендикулярных направлению «x».
Термин «направление z» в данном изобретении означает направление скольжения вдоль оси в плоскости из группы плоскостей, перпендикулярных опорной плоскости крана-штабелера и перпендикулярных направлению «x» и направлению «y».
В дополнительном аспекте, вышеупомянутые задачи решаются посредством хранилища для хранения контейнеров пробирок с биологическими материалами, содержащего множество стеллажей, ограничивающих множество ячеек для контейнеров пробирок с биологическими материалами, причем хранилище содержит кран-штабелер для транспортировки и установки контейнеров пробирок с биологическими материалами в ячейки множества стеллажей и выемки этих контейнеров из упомянутых ячеек в соответствии с данным изобретением.
Эти и другие признаки данного изобретения станут понятнее из нижеследующего подробного описания подходящих вариантов осуществления, в котором предпочтительный вариант осуществления раскрыт в качестве неограничительного примера в связи с прилагаемыми чертежами, при этом:
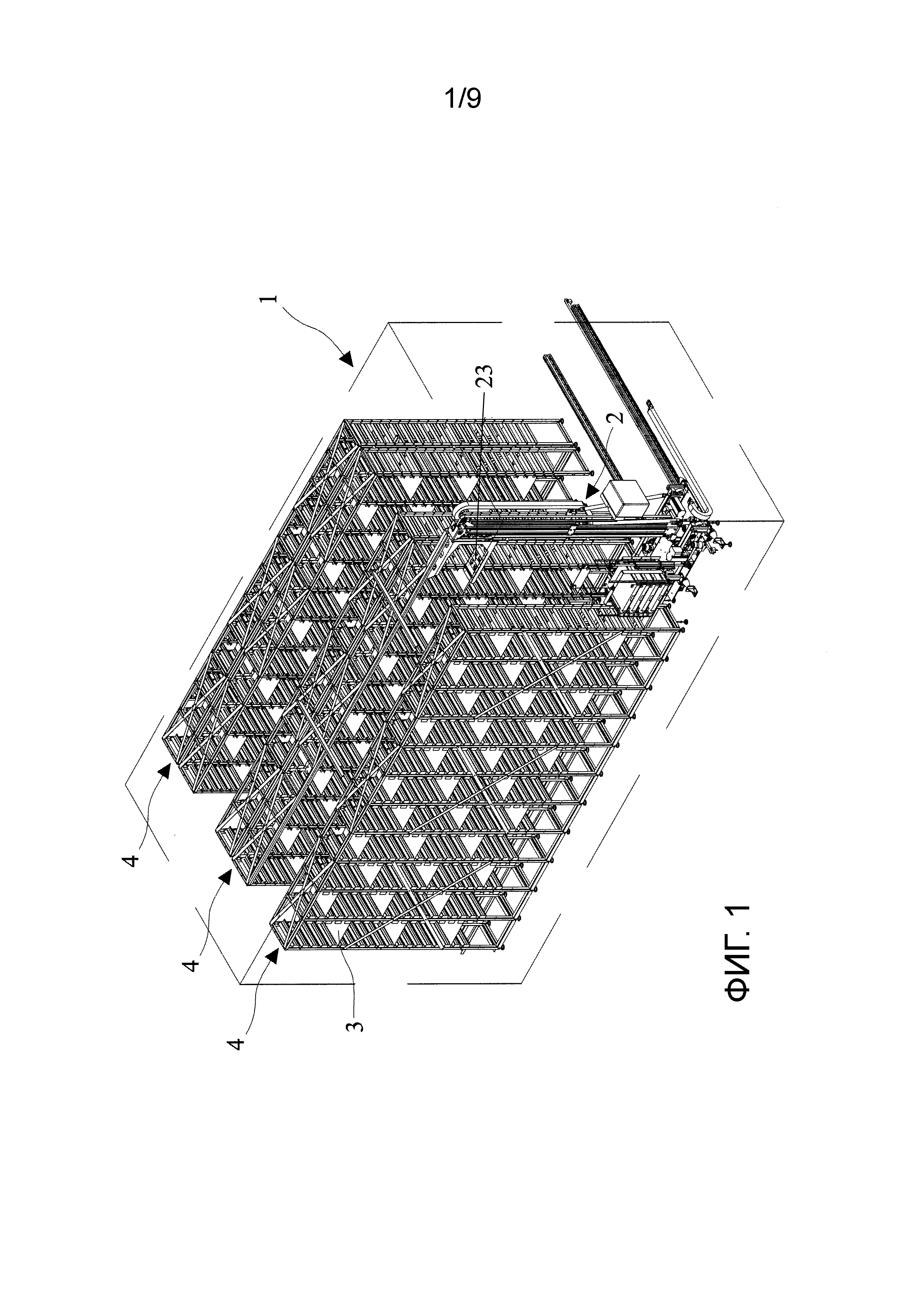
на фиг.1 показано перспективное изображение хранилища для хранения контейнеров пробирок с биологическими материалами, оснащенного штабелером в соответствии с данным изобретением для хранения и выемки упомянутых контейнеров;
на фиг.2 показан вид сбоку штабелера в соответствии с данным изобретением;
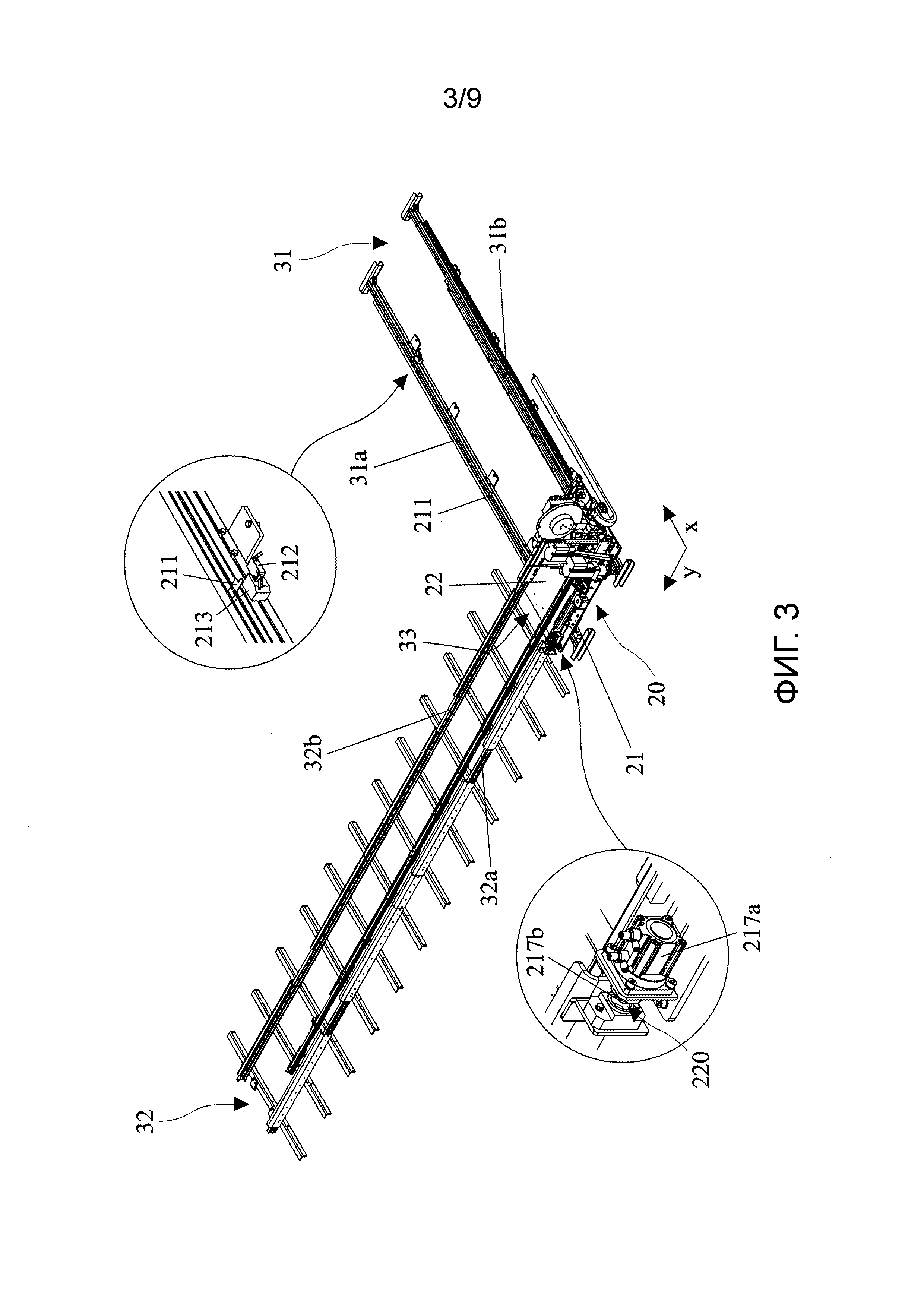
на фиг.3 иллюстрируется перспективное изображение подвижной конструкции штабелера и направляющих средств, вдоль которых он скользит, с двумя подробностями, касающимися запорных средств и датчиков конца хода, соответственно;
на фиг.4 показано перспективное изображение первой и второй кареток подвижной конструкции штабелера;
на фиг.5 иллюстрируется перспективное изображение снизу некоторых датчиков, выполненных как единое целое с первой кареткой подвижной конструкции;
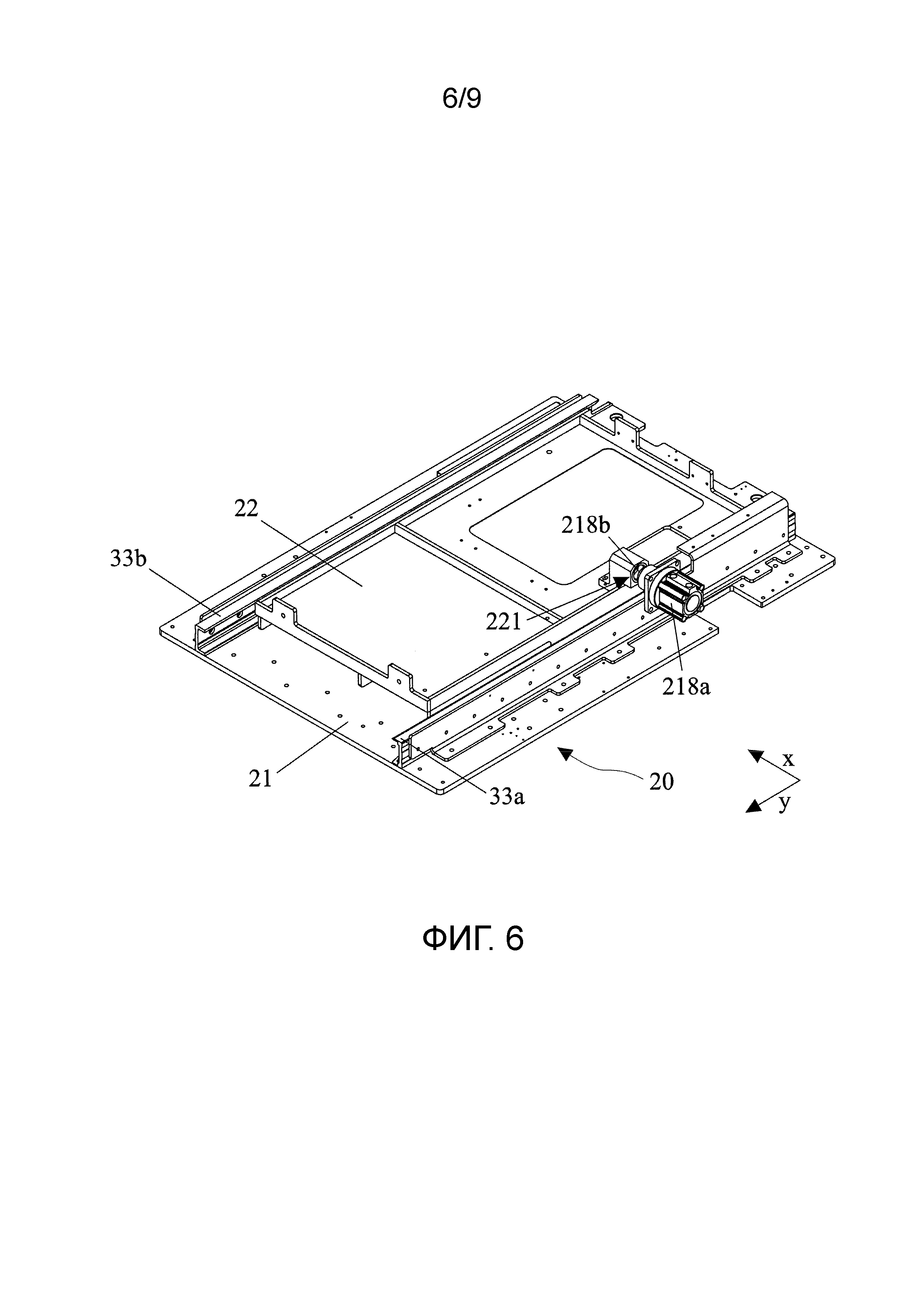
на фиг.6 показано перспективное изображение подвижной конструкции с запорным механизмом второй каретки на первой каретке;
на фиг.7 показано перспективное изображение подвижной конструкции штабелера, снабженного механизмами скольжения;
на фиг.8 показан вид сбоку подвижной конструкции штабелера и механизма скольжения с подробностью, касающейся формы пары направляющих, предусмотренной на первой каретке;
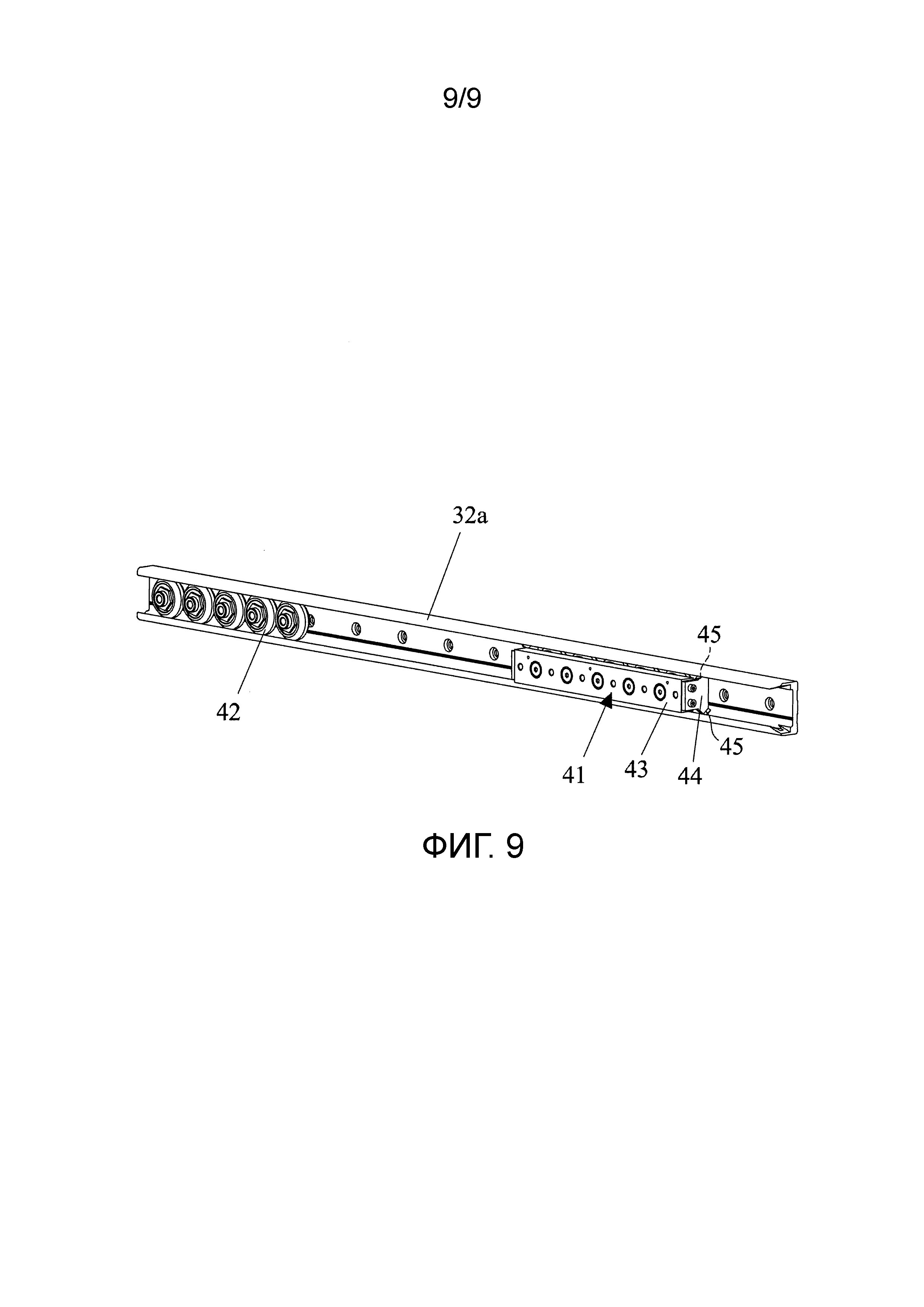
на фиг.9 иллюстрируется подробное перспективное изображение механизма скольжения.
На фиг.1 показано перспективное изображение хранилища для хранения контейнеров пробирок с биологическими материалами, содержащее кран-штабелер 2, именуемый далее штабелером и предназначенный для транспортировки контейнеров вышеупомянутого материала и для установки их в ячейки 3 множества стеллажей 4 хранилища 1 и выемки контейнеров из этих ячеек. Кран-штабелер 2 способен удобно перемещать контейнеры пробирок с биологическими материалами в трех направлениях «x», «y» и «z» декартовых координат с целью достижения ячеек 3. В частности, штабелер 2 выполнен с возможностью позиционирования сначала у подножия соответствующего стеллажа 4, а затем - подъема по вертикали с целью достижения подходящей высоты перед конкретной ячейкой 3, которой нужно достичь.
В варианте осуществления, описываемом здесь, в частности, со ссылками на фиг.1, хранилище 1 содержит множество стеллажей 4, обращенных друг к другу, которые ограничивают подходящие проходы для перемещения штабелера 2 между двумя стеллажами 4, обращенными друг к другу. Помимо этого, стеллажи 4 расположены так, что ограничивают дополнительный проход для перемещения штабелера 2 у концов множества стеллажей 4. Вышеупомянутые проходы подробнее описываются ниже.
Обращаясь к трем направлениям «x», «y» и «z» декартовой системы координат, отмечаем, что в данном варианте осуществления термин «направление x» относится к направлению перемещения штабелера 2 вдоль прохода у концов множества стеллажей 4, определяемого ниже как концевой проход или средний проход. Термин «направление y» относится к направлению перемещения крана-штабелера 2 вдоль проходов между двумя стеллажами 4, обращенными друг к другу, определяемых ниже как промежуточные проходы, что позволяет получить поступательное движение штабелера 2 между ячейками 3, расположенными на одной и той же плоскости, параллельной опорной плоскости вышеупомянутого штабелера 2, как последовательность или ряд ячеек 3. Термин «направление z» относится к направлению перемещения штабелера 2 вдоль последовательности ячеек 3, расположенных на одной и той же плоскости, перпендикулярной опорной плоскости вышеупомянутого штабелера 2, как последовательность или столбец ячеек 3.
Нижеследующее описание не предусматривает изменение ни в отношении того, какой материал всякий раз транспортируется штабелером 2, ни в отношении контейнера, в котором такой материал заключен; поэтому такие подробности ниже опущены как неуместные.
В варианте осуществления, раскрытом на прилагаемых чертежах, привод перемещения штабелера 2 во всех направлениях осуществляют подходящие электродвигатели 5, 6 и 7, каждый из которых предназначен для перемещения штабелера 2 вдоль одного из направлений «x», «y» и «z» (фиг.2). В альтернативных вариантах осуществления (не раскрыты), перемещение вдоль направлений «x», «y» и «z» можно также получить с помощью одного-единственного электродвигателя, оснащенного системой привода, способной передавать движение в каждом из желаемых направлений.
Перемещению штабелера 2 в двух направлениях «x» и «y», которые перпендикулярны друг другу, имеющему целью позиционирование перед подходящим столбцом стеллажа 4 в преддверии последующего расположения у конкретной ячейки 3, принадлежащей тому же столбцу, способствует присутствие подвижной конструкции 20, содержащей первую каретку 21, и второй каретки 22 (фиг.3). Вторая каретка 22 может перемещаться как единое целое с первой кареткой 21 в положении над ней, или может быть отдельной от нее и способной перемещаться независимо, как станет очевидно из нижеследующего. Подвижная конструкция 20 дополнительно содержит третью каретку 23 (фиг.1), способную перемещаться как единое целое с первой кареткой 21 и со второй кареткой 22, или независимо от каждой из вышеупомянутых кареток, как станет очевидно из нижеследующего.
Кран-штабелер 2 содержит первые направляющие средства 31 вдоль направления «x», содержащие первую пару направляющих 31a, 31b, и вторые направляющие средства 32 вдоль направления «y», перпендикулярного направлению «x», содержащие, по меньшей мере, одну вторую пару направляющих 32a, 32b. Помимо этого, штабелер 2 содержит третьи направляющие средства вдоль направления «z».
В раскрытом здесь варианте осуществления, в частности, первые направляющие средства 31 содержат одну-единственную - первую - пару направляющих 31a, 31b. Вместо этого, вторые направляющие средства 32 содержат множество вторых пар направляющих 32a, 32b, а в частности их количество равно двум и расположены они параллельно бок о бок, так что каждая вторая пара направляющих 32a, 32b располагается между двумя из множеств стеллажей 4, обращенных друг к другу, ограничивая промежуточные проходы. Более того, первая пара направляющих 31a, 31b первых направляющих средств 31 располагается на одном том же конце множества вторых пар направляющих 32a, 32b, тем самым ограничивая концевой проход. Вместо этого, третьи направляющие средства для третьей каретки 23 ограничены системой ременного привода.
В дополнительном варианте осуществления (не показан), первые направляющие средства содержат одну-единственную - первую - пару направляющих, как описано выше для показанного варианта осуществления, а вторые направляющие средства содержат множество вторых пар направляющих, расположенных с выравниванием и у противоположных концов первой пары направляющих таким образом, что каждая вторая пара направляющих находится у множества стеллажей, причем упомянутые стеллажи расставлены бок о бок и разделены первой парой направляющих. В варианте осуществления вышеупомянутого типа, первая пара направляющих ограничивает средний проход, а множества вторых пар направляющих ограничивают промежуточные проходы.
Чтобы обеспечить облегчение нагрузки даже во время перемещение штабелера 2 вдоль направления «x», вышеупомянутая вторая пара направляющих 32a, 32b, будь то одна пара или несколько, является отдельной и независимой от первой каретки 21 и от второй каретки 22. Более того, первая каретка 21 снабжена выполненной как единое целое с ней третьей парой направляющих 33a, 33b для второй каретки 22, которые вносят вклад в образование вторых направляющих средств 32, когда первую каретку 21 располагают у второй пары направляющих 32a, 32b, тем самым выравнивая третью пару направляющих 33a, 33b со второй парой направляющих 32a, 32b.
Совместное перемещение обеих кареток 21, 22 происходит во время перемещения штабелера 2 в направлении «x», при этом первая каретка 21 способна скользить как единое целое со второй кареткой 22 в направлении «x» вдоль первой пары направляющих 31a, 31b. Перемещение второй каретки 22 вдоль направления «y» происходит вдоль одной из вторых пар направляющих 32a, 32b и третьей пары направляющих 33a, 33b, причем упомянутая третья пара направляющих 33a, 33b выполнена как единое целое с первой кареткой 21, как показано в качестве примера на фиг.3. Вторая каретка 22 способна скользить независимо от и освобождаться от первой каретки 21 вдоль вторых направляющих средств 32 в направлении «y», от третьей пары направляющих 33a, 33b ко второй паре направляющих 32a, 32b, и наоборот, посредством использования подходящих механизмов 40 скольжения второй каретки 22, подробнее описываемых ниже. Третья каретка 23 способна скользить как единое целое с первой кареткой 21 и второй кареткой 22 в направлении «x» вдоль первой пары направляющих 31a, 31b, как единое целое только со второй кареткой 22 в направлении «y» вдоль второй пары направляющих 32a, 32b и независимо вдоль третьих направляющих средств в направлении «z», таким образом освобождаясь от первой каретки 21 и от второй каретки 22.
Благодаря воздействию первого электродвигателя 5 на первую пару 51, 52 шестерня-зубчатая рейка (фиг.4), штабелер 2 сначала перемещается в направлении «x» вдоль первой пары направляющих 31a, 31b. Следовательно, на этом этапе вся подвижная конструкция 20 в целом с каретками 21, 22 и 23, выполненными как единое целое друг с другом, перемещается в направлении, обозначенном стрелкой «x» на фиг.3, пока не входит в зацепление с одним из кронштейнов 211 (фиг.3, 5) с датчиком 210, выполненным как единое целое с первой кареткой 21 (фиг.5), а этот датчик 210 различает достижение некоторого заданного промежуточного прохода вдоль направления «y». Тогда штабелер 2 предназначен для захода в упомянутый промежуточный проход, отсоединяя при этом вторую каретку 22, а затем - и третью каретку 23, от первой каретки 21.
Помимо этого, датчик 212 конца хода, опять выполненный как единое целое с первой каретки 21, различает достижение того же самого из двух концевых положений в ходе ее перемещения, входя в зацепление с отдельными блоками 213 и 214, находящимися в вышеупомянутых концевых положениях, показанных на фиг.3 (на которой датчик 212 конца хода показан для удобства в положении, которое изолировано от первой каретки 21, фактически не являясь изолированным от нее) и на фиг.5, соответственно. На этом последнем чертеже показан дополнительный датчик 215, который также выполнен как единое целое с первой кареткой 21 и который входит в зацепление с дополнительным кронштейном 216 в показанном здесь положении конца хода.
Первая каретка 21 и вторая пара направляющих 32a, 32b снабжены первым запорным механизмом, способным гарантировать выравнивание подвижной конструкции 20 со второй парой направляющих 32a, 32b. В частности, упомянутый запорный механизм содержит цилиндр 217a, выполненный как единое целое с первой кареткой 21, и корпус 220, выполненный как единое целое элементом второй пары направляющих 32a, 32b. Помимо этого, первая каретка 21 и вторая каретка 22 снабжены вторым запорным механизмом, способным гарантировать соединение первой каретки 21 со второй кареткой 22. В частности, упомянутый второй запорный механизм содержит цилиндр 218a, выполненный как единое целое с первой кареткой 21, и корпус 221, выполненный как единое целое со второй кареткой 22. Точно так же, можно предусмотреть третий запорный механизм, аналогичный второму запорному механизму, для сочленения и расчленения второй каретки 22 и третьей каретки 23.
Как упоминалось, когда подвижная конструкция 20 уже достигла подходящего промежуточного прохода, вдоль которого необходимо переместить штабелер 2 в направлении «y», цилиндр 217a (фиг.3), тоже выполненный как единое целое с первой кареткой 21, активируется, причем такой цилиндр 217a перемещает палец 217b, который вставлен в подходящий корпус 220, выполненный как единое целое с одним из элементов второй пары направляющих 32a, 32b, гарантируя оптимальное выравнивание подвижной конструкции 20 со второй парой направляющих 32a, 32b ввиду движения скольжения штабелера 2.
Затем осуществляется движение скольжения второй каретки 22 в направлении «y» вдоль второй пары направляющих 32a, 32b (фиг.3), привод которого имеет место за счет воздействия второго электродвигателя 6 на вторую пару 61, 62 шестерня-зубчатая рейка (фиг.4), а калибровка - посредством кодера самого второго электродвигателя 6 (следовательно - без необходимости какого-либо датчика). Такое движение скольжения может происходить вплоть до позиционирования второй каретки 22, которая снабжена третьей кареткой 23, у самой нижней ячейки 3 стеллажа 4 (фиг.1), перед которой штабелер 2 должен затем подняться, чтобы вынуть или заложить материал, который предназначен для транспортировки. Поэтому движение скольжения вдоль направления «z» осуществляется посредством третьей каретки 23, которая способна скользить независимо в направлении «z» вдоль третьих направляющих средств, которые ограничены системой ремней в данном варианте осуществления, и тем самым - освобождаться, как от первой каретки 21, так и от второй каретки 22.
В конце движения вверх штабелера 2, т.е., третьей каретки 23, вторая каретка 22 возвращается, перемещаясь в противоположном направлении вдоль второй пары направляющих 32a, 32b, к первой каретке 21 для достижения соединения между ними.
Сочленение второй каретки 22 с первой кареткой 21 гарантируется вторым запорным механизмом, т.е., цилиндр 218a, выполненный как единое целое с первой кареткой 21, перемещает палец 218b, который вводится в зацепление с подходящим корпусом 221, выполненным как единое целое со второй кареткой 22, тем самым гарантируя соединение между двумя каретками 21 и 22 (фиг.6). Точно так же, третий запорный механизм (не показан), аналогичный предыдущему, может гарантировать запирание и отпирание третьей каретки 23 по отношению ко второй каретке 22, когда перемещение происходит вдоль направления «y», а потом - по отношению к первой каретке 21, когда перемещение происходит вдоль направления «x».
Таким образом, перемещение штабелера 2 продолжается, возможно - опять перемещением вдоль направления «x», а потом - в другом проходе - вдоль направления «y».
Что касается обеих рассмотренных операций скольжения, т.е., операции скольжения первой каретки 21 вдоль первой пары направляющих 31 и операции скольжения второй каретки 22 вдоль второй пары направляющих 32, то они проходят плавно благодаря присутствию, по меньшей мере, одной пары механизмов 40, которые соединены как единое целое с каждой из обеих кареток 21, 22 (фиг.7).
Два механизма 40 скольжения, расположенные вдоль концов в ширину кареток 21, 22, действительно сами соединены с обеими каретками 21, 22, чтобы они стали выполненными как единое целое с ними (на фиг.7 показан единственный механизм 40 скольжения для каждой каретки).
Как недвусмысленно показано на фиг.9, каждый механизм 40 скольжения имеет один или несколько ползунов 41, способных скользить внутри первой пары направляющих 31a, 31b, второй пары направляющих 32a, 32b и третьей пары направляющих 33a, 33b, соответствующих каретке, с которой они сочленены. Каждый из механизмов 40 скольжения обеспечивает сочленяемую пластину 43 для каждой из соответствующих кареток 21, 22, которая поддерживает соответствующие средства качения, способные преобразовывать трение скольжения, характерное для поступательного движения, в трение качения. В раскрытом здесь варианте осуществления, такие средства качения содержат ряд подшипников 42, скользящих внутри соответствующих первой пары направляющих 31a, 31b, второй пары направляющих 32a, 32b и третьей пары направляющих 33a, 33b. Точно так же, можно использовать цилиндры, колеса или дополнительные элементы, способные облегчить перемещение, ограничивая при этом влияние трения.
Концевые элементы 44С сочленены с краями пластины 43 и наряду с первой парой направляющих 31a, 31b, второй парой направляющих 32a, 32b и третьей парой направляющих 33a, 33b закрывают пространство, занимаемое средствами качения, т.е. подшипниками 42, чтобы предотвратить проникновение примесей (фиг.8 и 9; на последнем чертеже левый ползун 41 не показан, чтобы лучше показать иллюстрируемые здесь подшипники 42). В частности, первая пара направляющих 31a, 31b, вторая пара направляющих 32a, 32b и третья пара направляющих 33a, 33b выполнены имеющими С-образный профиль, чтобы обеспечить улучшенное ограничение занимаемого ими пространства и управляемое скольжение механизмов 40 скольжения. В самом деле, концевые элементы 44 сочленены с сочленяемой пластиной 43, которая - наряду с C-образным профилем соответствующих пар направляющих 31a, 31b, 32a, 32b, 33a, 33b - находится вблизи занимаемого ими пространства. В любом случае, профиль пар направляющих можно реализовать с сечениями, отличающимися от C-образного профиля, например, имеющими U-образную или более сложные формы, в любом случае - подходящие для замыкания пространства, занимаемого механизмами скольжения.
Следует отметить, что концевым элементам 44 придана форма, позволяющая им входить в профиль, предпочтительно - C-образный, первой пары направляющих 31a, 31b, второй пары направляющих 32a, 32b и третьей пары направляющих 33a, 33b, предусматривающая наличие створок 45 таким образом, что те точно замыкают упомянутое пространство, занимаемое средствами качения, т.е., подшипниками 42.
Размеры ползунов 41 оказываются полностью подходящими для C-образного профиля направляющих 31a, 31b, 32a, 32b; в свете такой отладки, при движении скольжения ползунов 41, в направляющих клиренса нет вообще, и это отражается в абсолютной устойчивости и точном перемещении двух кареток 21, 22 и - соответственно - штабелера 2. Помимо этого, когда вторая каретка 22 отделяется от первой каретки 21, перемещаясь в промежуточном проходе вдоль направления «y», вторая пара направляющих 32a, 32b и третья пара направляющих 33a, 33b, вдоль которых должна скользить вторая каретка 22, полностью выравниваются благодаря воздействию цилиндра 217a (на фиг.3); вследствие этого, ползуны 41 второй каретки 22 могут адекватно скользить вдоль вышеупомянутых второй пары направляющих 32a, 32b и третьей пары направляющих 33a, 33b.
Поэтому инновационный аспект изобретения заключается в том, что движение скольжения кареток 21, 22 штабелера 2 вдоль первых и вторых направляющих средств 31 и 32 гарантирует - по отношению к известным решениям - меньшее трение и повышенную устойчивость, а также - по отношению к известным решениям - повышенную точность при перемещении штабелера 2. Результатом этого является исключение всех рисков переворачивания или даже всего лишь неуравновешенности штабелера 2, а вследствие того - и падения транспортируемого материала.
Конкретно важной является компактность подвижной конструкции 20 штабелера 2 вдоль вертикального направления (значит - по высоте). Благодаря предлагаемым новшествам, это позволяет достигать даже тех ячеек 3 стеллажей 4, которые располагаются ниже или выше, чем в известных решениях.
Описанный механизм также значительно тише, чем в существующих решениях, в которых движение скольжения происходит благодаря колесам, а кроме того, несомненно является более универсальным по сравнению с ними.
И, наконец, возможная сборка направляющих в случае направляющих C-образного профиля, обращенных наружу, способствует упрощенному техническому обслуживанию, когда оно требуется.
Таким образом, изобретение допускает серьезные модификации и изменения, причем все они находятся в рамках объема притязаний согласно замыслу изобретения.
На практике, можно использовать любые материалы, а также любые формы и размеры, в зависимости от потребностей.
Реферат
Данное изобретение относится к крану-штабелеру (2) для транспортировки и введения контейнеров пробирок с биологическими материалами в ячейки (3) множества стеллажей (4) склада (1) и выемки этих контейнеров из упомянутых ячеек. Склад предназначен для хранения упомянутых контейнеров пробирок с биологическими материалами. Кран-штабелер (2) способен перемещать контейнеры пробирок с биологическими материалами в трех направлениях «x», «y» и «z» декартовых координат с целью достижения упомянутых ячеек (3), при этом кран-штабелер (2) содержит первую каретку (21) и вторую каретку (22), способную скользить как единое целое с первой кареткой (21) в направлении «y» и освобождаться от нее. Изобретение обеспечивает повышенную устойчивость и точность перемещения крана-штабелера. 2 н. и 12 з.п. ф-лы, 9 ил.
Комментарии