Подземная система для сбора мусора - RU2492127C2
Код документа: RU2492127C2
Чертежи







Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к подземной системе для сбора мусора, содержащей подземный бункер, контейнер для мусора, мусорную урну и автоматически открывающуюся и закрывающуюся крышку, энергопитание которой может производиться от устройства, использующего солнечную энергию. Извлечение контейнера проводится с помощью автокрана, который с этой целью выполнен с возможностью автоматического захвата контейнера. Система оборудована несколькими устройствами, предназначенными для измерения объема и веса мусора, помещенного в мусорную урну, причем указанные измерения проводятся с целью мониторинга системы или усовершенствований в управлении маршрутами мусоросборщиков. Кроме того, в системе имеется предохранительное устройство, предотвращающее случайные падения в подземный бункер во время извлечения контейнера.
Уровень техники
Известны подземные системы сбора мусора с использованием контейнеров, размещаемых внутри подземного бункера. Бункер расположен под крышкой, к которой присоединена мусорная урна и которую можно открывать вручную или автоматически. Извлечение контейнера проводится с применением крана, установленного на грузовике-мусоросборщике. Чтобы выгрузить мусор в такой грузовик, контейнер перемещают в позицию над мусоросборщиком или рядом с ним, а затем открывают снизу или опрокидывают. Зацепление крюком крана грузовика балки, расположенной на контейнере, проводят вручную.
Уровень техники представлен патентами Португалии №№101968, 102148, 102748 и патентами Испании №№2036916, 2138480, 2153733, 2228225, 2228226, выданными на имя заявителя настоящего изобретения.
Патент Португалии №101968 и патент Испании №2138480 относятся к точкам накопления городского мусора, содержащим несколько независимых отсеков, которые предназначены для накопления мусора одинакового или различающегося типа. Каждый из отсеков имеет на входе по меньшей мере одну урну или мусоропровод, помещенную (помещенный) на соответствующей откидной крышке и расположенный (расположенные) на надлежащей высоте, не позволяющей мусору скапливаться внутри урны или мусоропровода. На своей откидной крышке каждый из отсеков снабжен по меньшей мере одним люком для выгрузки, в который можно установить выводящий мусоропровод. Посредством вакуума или любого другого подобного воздействия через указанный мусоропровод мусор выгружают в транспортное средство-мусоросборщик.
Патент Португалии №102148 и патент Испании №2153733 описывают подземную систему для сбора мусора, содержащую один или более независимых отсеков, которые предназначены для накопления мусора одинакового или различающегося типа. Каждый из отсеков имеет на входе по меньшей мере одну урну или мусоропровод, помещенную (помещенный) на откидной крышке, и по меньшей мере один контейнер для мусора, установленный на платформе. Указанная платформа оборудована средством для поднимания/опускания контейнера между двумя положениями, в одном из которых контейнер находится под землей и спрятан под откидной крышкой, а другое предназначено для извлечения контейнера, во время которого мусор переправляют к транспортным средствам-мусоросборщикам, использующим свой способ опоражнивания (с наклоном контейнера или без наклона). Контейнер в нижней части снабжен поддоном, имеющим собственное открывающее и закрывающее средство, которое используется для извлечения мусора без наклона контейнера. В другом варианте контейнер имеет фиксированное основание, снабженное собственным средством манипулирования, управляемым от мусоросборщика с целью извлечения мусора посредством наклона контейнера.
Патент Португалии №102748, а также патенты Испании №№2228225 и 2228226 относятся к устройству для открывания откидной крышки подземных точек накопления твердого городского мусора. Крышка имеет одну или более петель, которые позволяют откидывать ее на угол примерно 90°, один или более запоров, фиксирующих ее в закрытом положении, и, для облегчения открывания, один или более гидроцилиндров, пневмоцилиндров или электроцилиндров, соединяющих крышку с хранилищем. Указанный контейнер, представляющий собой цельный корпус, открытый на верхней стороне, предназначен для применения в системах, использующих опоражнивание посредством опрокидывания, и на своих противоположных боковых сторонах оборудован парой запоров. В другом варианте контейнер представляет собой двойной корпус, предназначен для применения в системах, использующих опоражнивание снизу, и имеет, кроме того, двойную крышку, верхняя часть которой представляет собой поддон с одним отверстием или с множеством отверстий для стекания жидкостей из мусора в сторону закрытого основания.
Во всех перечисленных системах приходится решать следующие проблемы: осуществление автоматического зацепления краном грузовика балки на контейнере; осуществление извлечения одним оператором, использование альтернативных источников энергии для открывания крышки, мониторинг всей системы накопления/извлечения и повышение безопасности во время извлечения.
Краткое описание чертежей
Следующее далее описание, составленное для лучшего понимания настоящего изобретения, опирается на прилагаемые чертежи, не имеющие ограничительного характера.
Фиг.1 на виде сбоку схематично иллюстрирует подземную систему в ее открытом состоянии.
На фиг.2 представлен фрагмент системы с показом центрального запора.
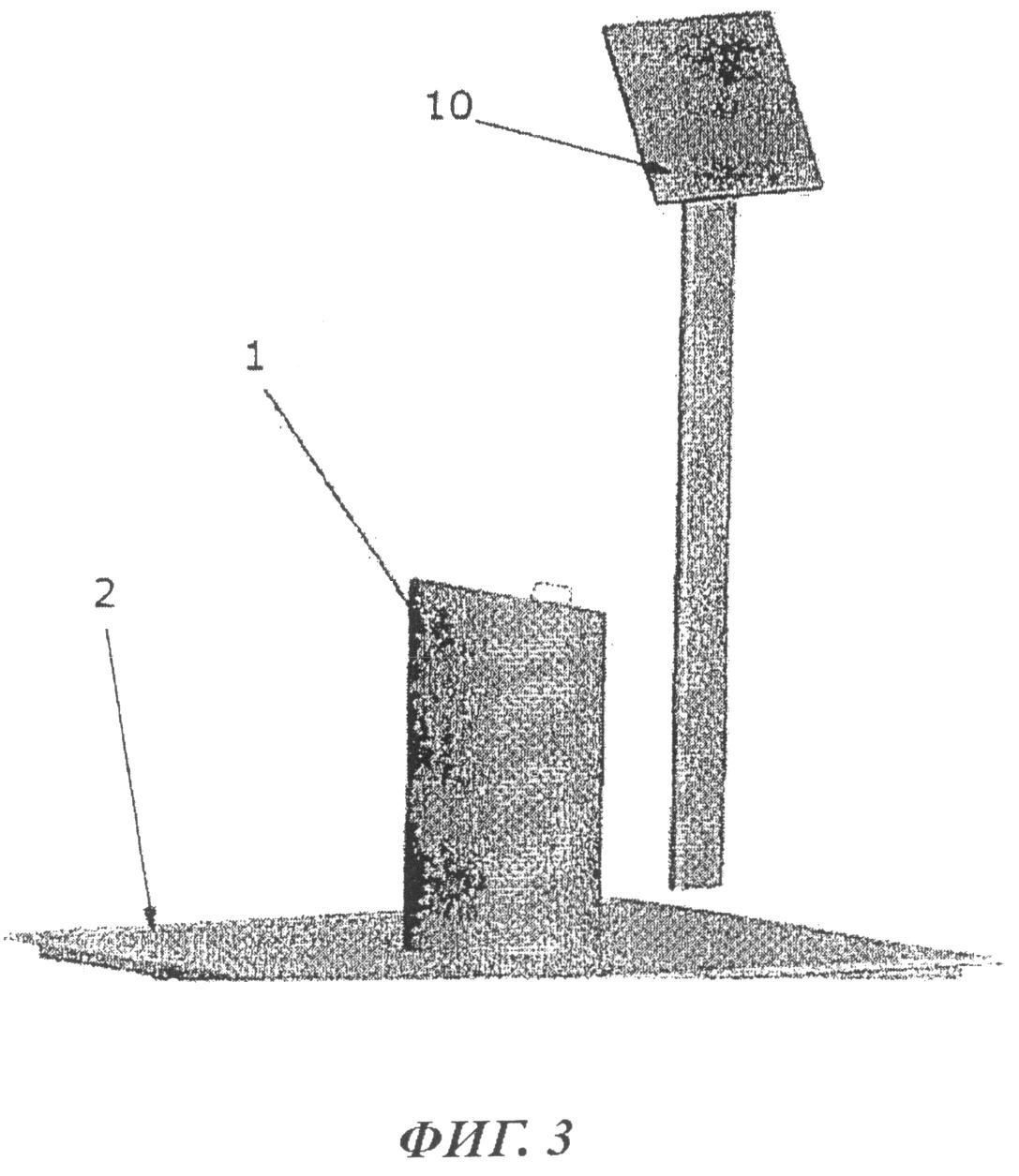
На фиг.3 представлено устройство, питающее цилиндры за счет солнечной энергии.
Фиг.4 на виде спереди иллюстрирует наружную часть системы.
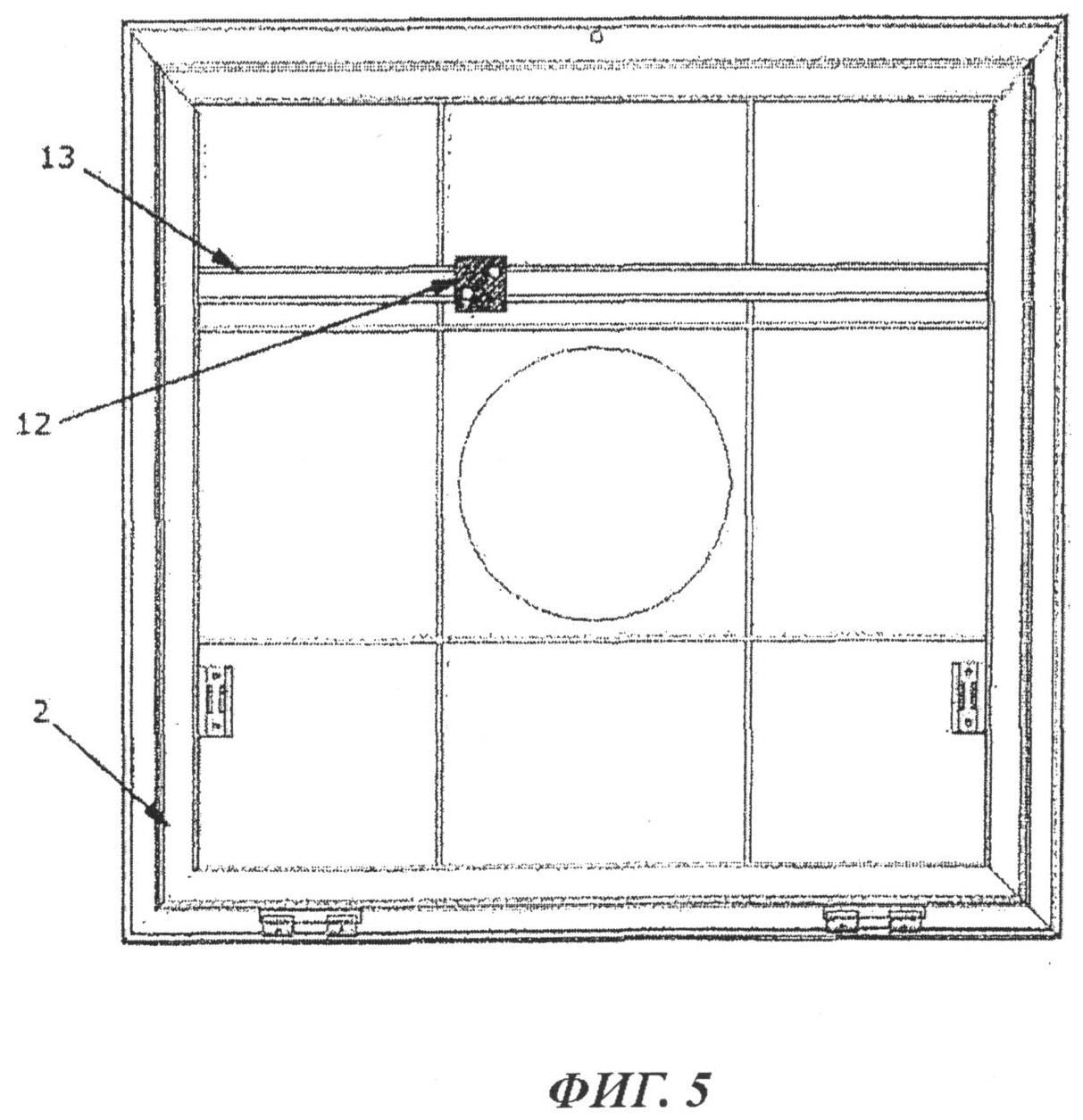
На фиг.5 представлен фрагмент системы с показом направляющей, прикрепленной к нижней стороне крышки системы.
Фиг.6 в сечении иллюстрирует подземную систему в ее открытом состоянии с контейнером, поднимаемым краном грузовика-мусоросборщика.
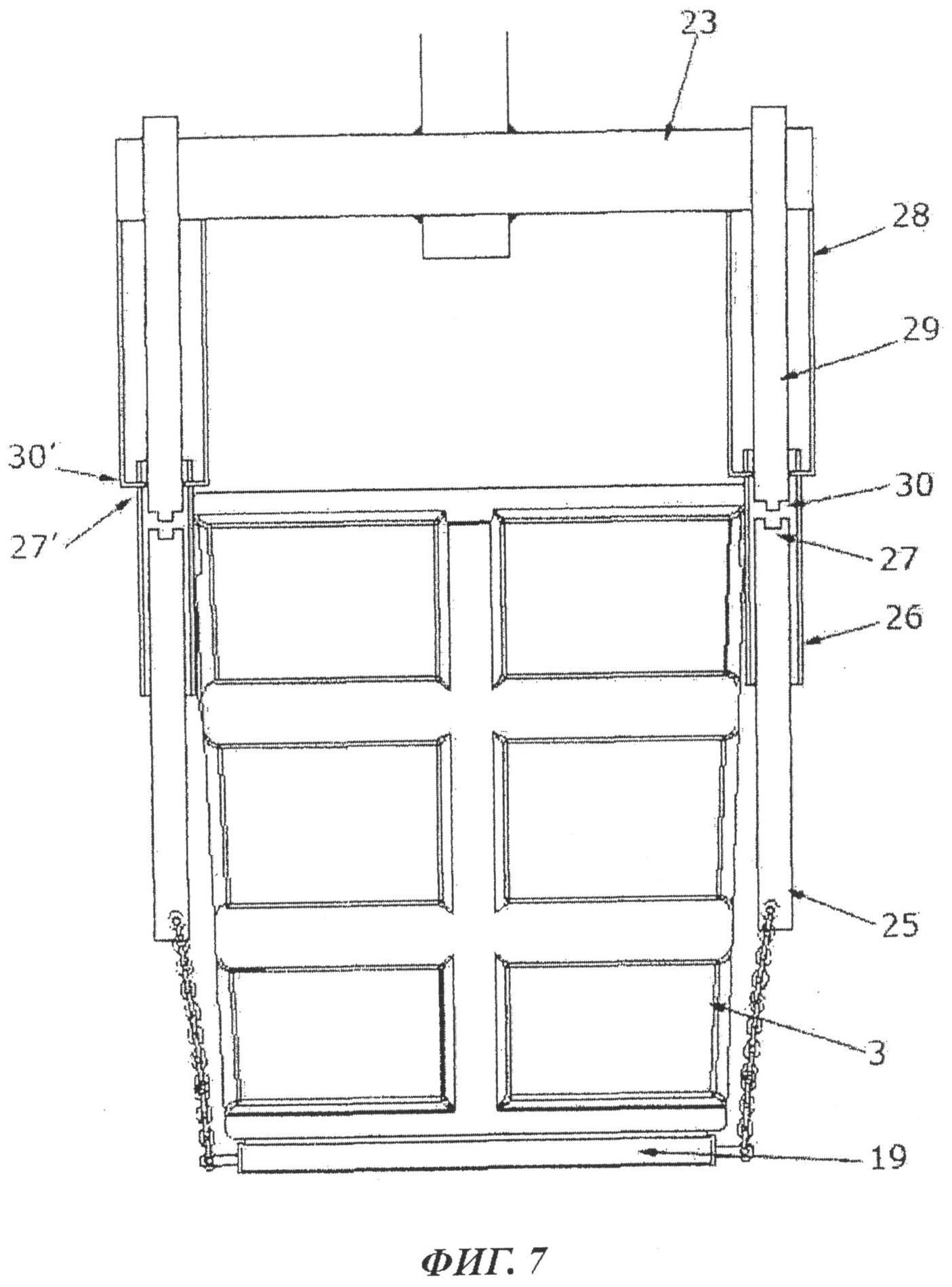
На фиг.7 представлено автоматическое устройство, сцепляющее кран грузовика-мусоросборщика, и контейнер, опоражниваемый снизу.
На фиг.8 представлено автоматическое устройство, сцепляющее кран грузовика-мусоросборщика, и контейнер с закрытым основанием, опоражниваемый посредством опрокидывания.
На фиг.9 представлено предохранительное устройство в своем наружном вертикальном положении.
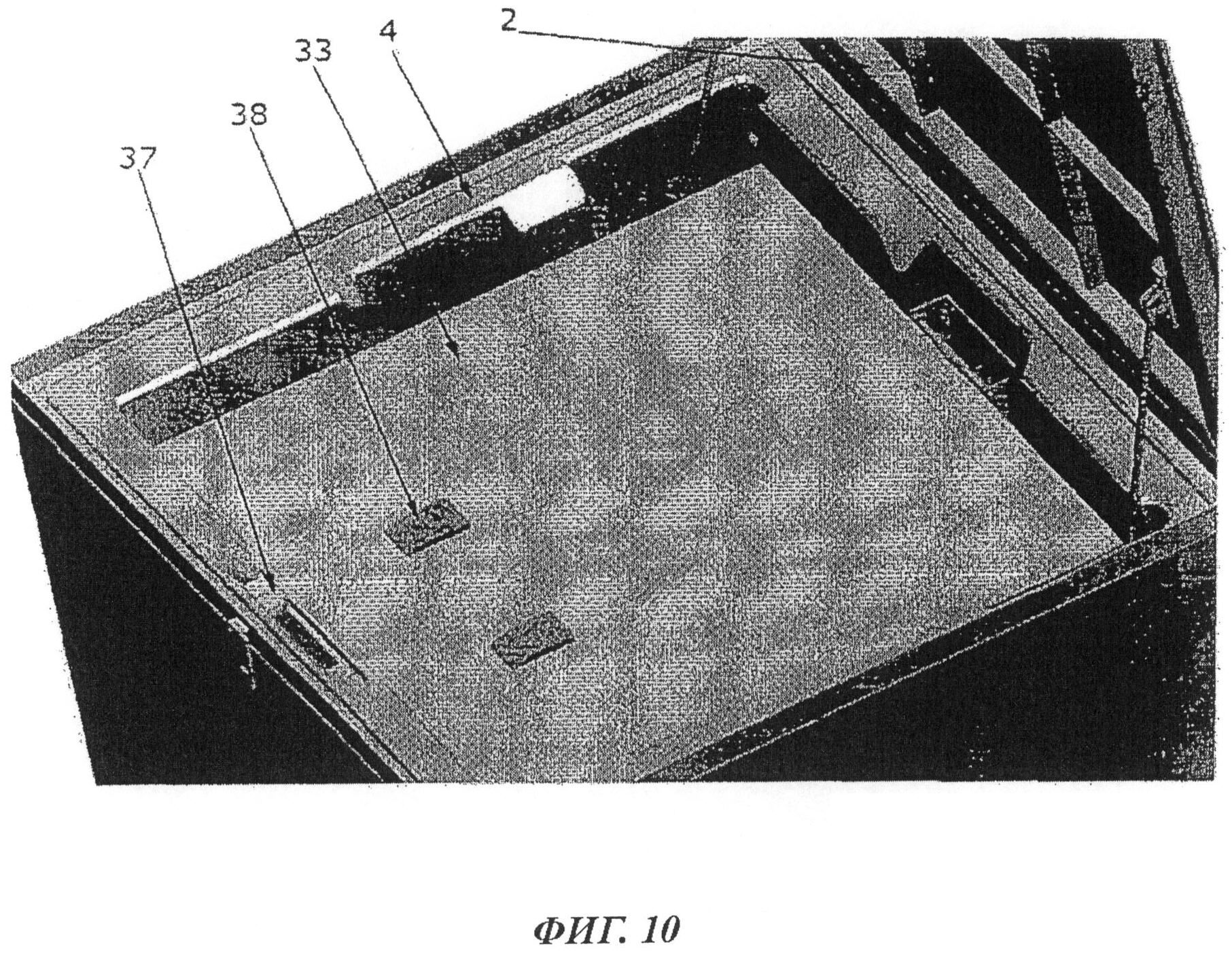
На фиг.10 предохранительное устройство представлено в своем горизонтальном положении, в котором во время извлечения мусора отверстие подземного бункера перекрыто.
На фиг.11 представлено устройство для измерения веса скопившегося мусора.
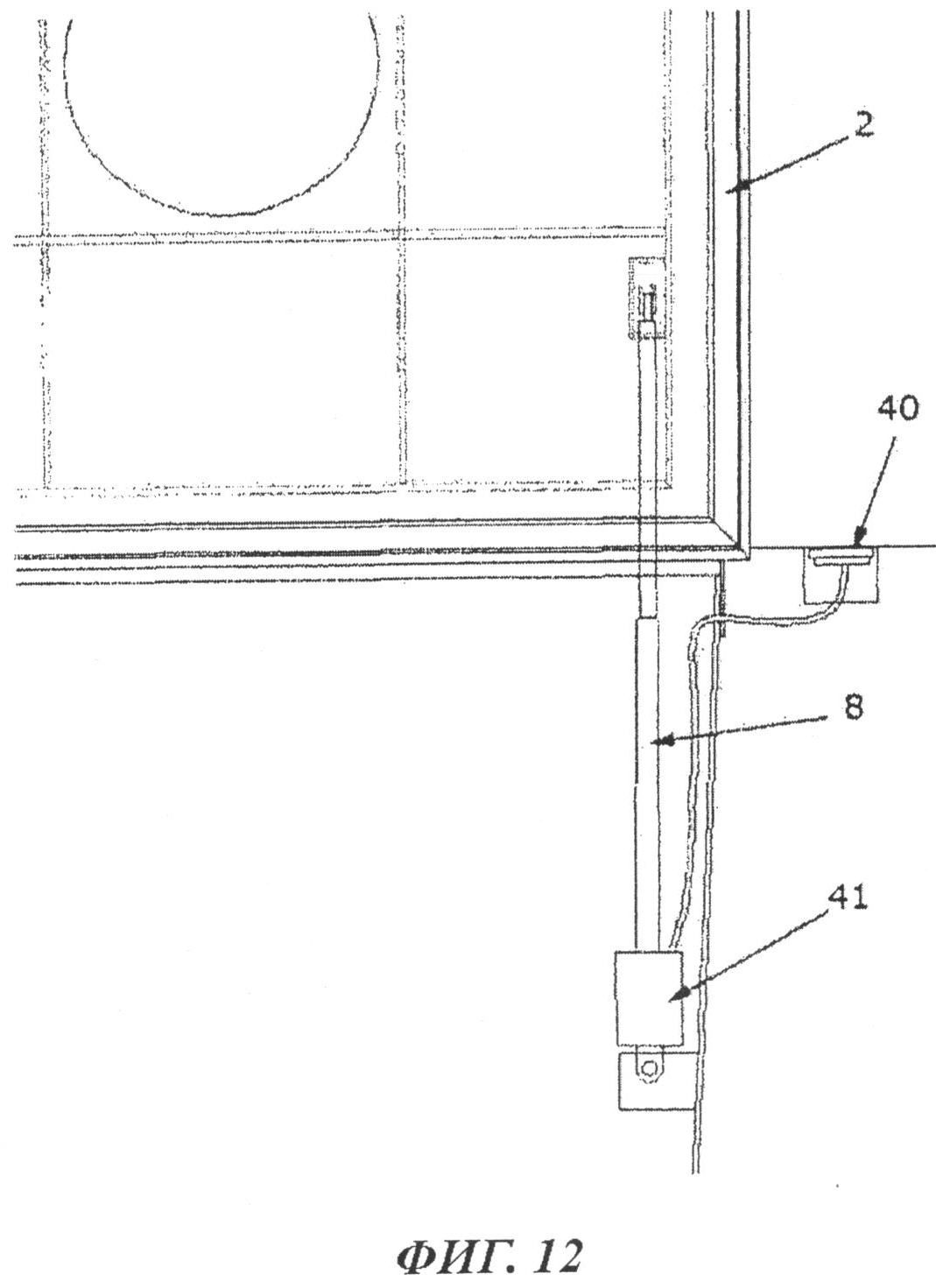
На фиг.12 представлен фрагмент системы с показом декомпрессионной камеры, которая прикреплена к пневмоцилиндру, подключенному к управляющей кнопке, расположенной на поверхности.
Осуществление изобретения
В соответствии с задачами, на решение которых направлено изобретение, предлагается система, оборудованная крышкой 2 с двумя петлями 5 на одной стороне и центральным запором 6 на другой, причем указанный запор 6 снабжен вертикальным стопорным болтом 7, предотвращающим поворот язычка запора 6 и, таким образом, удерживающим крышку 2 в закрытом положении. Предусмотрена возможность автоматического открывания или закрывания крышки 2 с помощью пневмоцилиндров 8 с декомпрессионной камерой 41, которые подключены к управляющей кнопке 40, расположенной на поверхности, на специальном кожухе. Это позволяет автоматически закрывать крышку посредством стравливания газа из цилиндров в камеру 41. Вместо пневмоцилиндров 8 можно использовать электрогидравлические цилиндры или гибридное устройство, состоящее из одного электрогидравлического цилиндра и одного пневмоцилиндра. Пневмоцилиндры 8, прикрепленные к подземному бункеру 4 и крышке 2, имеют электрическое питание приводного узла, и, когда стопорный болт 7 выдернут, а запор 6 повернут, позволяют автоматически откинуть крышку на 90° и автоматически закрыть ее с помощью упомянутой управляющей кнопки 40, которую следует нажать и удерживать в нажатом состоянии (см. фиг.12). Предусмотрена возможность питания цилиндров 8 от устройства, работающего на солнечной энергии и содержащего одну или более фотоэлектрических панелей 10. На фиг.3 показано, что панель размещена на столбе, расположенном рядом с крышкой 2 и входной (мусорной) урной 1. В другом варианте источником питания является электросеть или электрическая энергия, подаваемая от грузовика или автономного генератора.
На фиг.1 подземная система представлена в открытом состоянии. Система содержит мусорную урну 1, расположенную на высоте примерно 90 см, крышку 2, которая опирается на мостовую и откидывается вверх на 90°, контейнер 3 для сбора мусора и подземный бункер 4. Крышка оборудована двумя петлями 5 на одной стороне и центральным запором 6 на другой. Она открыта посредством цилиндров 8, прикрепленных к ней и к подземному бункеру. Мусорную урну 1, имеющую верхний люк, можно снабдить центральным запором 11, удерживающим люк в закрытом положении. Для взвешивания мусора, поступившего в контейнер 3 или в мусорную урну 1, предусмотрена возможность использования датчиков 14 нагрузки, размещенных в подземном бункере, или датчиков 15 такого же назначения, размещенных в нижней части мусорной урны (как это будет описано далее).
Фиг.2 позволяет детально рассмотреть центральный запор 6 со стопорным болтом 7, удерживающий крышку 2 в закрытом положении.
Перемещениями крышки 2 дистанционно управляет мобильное устройство или уже упоминавшийся комплект управляющих кнопок, доступный только оператору, находящемуся на улице рядом с крышкой 2. В другом варианте для этого используют мобильное устройство, поднося его к помещенному рядом с крышкой 2 блоку 9 радиочастотной идентификации.
Открыв крышку 2, опоражнивают контейнер 3 с помощью устройства, автоматически сцепляющего контейнер 3 и кран 18 грузовика-мусоросборщика 17.
Контейнер, опоражниваемый посредством открывания снизу, на своей верхней стороне полностью открыт, а каждая из боковых его сторон оборудована комплектом сцепных элементов 22, верхние концы которых прицепляют к устройству, расположенному в верхней части крана. У своих нижних концов указанные сцепные элементы примыкают к основанию 19, которое откидывается на петлях 20. Комплект сцепных элементов 22 дополняет подвижный сцепной элемент 25, помещенный внутри неподвижного сцепного элемента 26, присоединенного к корпусу контейнера 3. Чтобы обеспечить возможность зацепления, сцепные элементы 25 и 26 у своего верхнего конца снабжены несколькими вырезами 27 и 27' соответственно.
На фиг.6 подземная система в открытом состоянии показана на этапе, когда контейнер 3 поднимается краном 18 грузовика-мусоросборщика 17. Как можно видеть на чертеже, верхняя часть крана 18 оборудована сцепляющим устройством 21, присоединяемым к комплекту сцепных элементов 22 на каждой боковой стороне контейнера 3. Указанный комплект прикреплен к основанию 19, откидывающемуся на петлях 20. Сцепляющее устройство 21, присоединенное к стреле крана, состоит из одной горизонтальной балки 23 и двух вертикальных консолей 24.
Контейнер с закрытым основанием, предназначенный для разгрузки посредством опрокидывания, на внутренней поверхности каждой боковой стороны имеет прикрепленный к корпусу контейнера 3 сцепной элемент 31, на конце которого выполнены вырезы 32, обеспечивающие возможность сцепления с наружным компонентом 28 сцепляющего устройства 21, расположенного в верхней части крана.
Сцепляющее устройство 21, находящееся в верхней части крана грузовика-мусоросборщика, имеет горизонтальную балку 23, установленную с возможностью поворота на 360°, и две вертикальные консоли 24, установленные с возможностью вертикального перемещения посредством гидроцилиндров. Каждая из указанных консолей 24 состоит из наружного компонента 28 и внутреннего компонента 29, каждый из которых, в свою очередь, имеет на своем конце захват 30 и 30' соответственно, как это показано на фиг.7.
Для контейнеров с откидывающимся основанием извлечение контейнера в возможном варианте проводят следующим образом:
- автоматически открывают крышку 2 подземной системы,
- под автоматизированным управлением со стороны оператора перемещают кран 18 до тех пор, пока его верхняя часть не окажется над находящимся под землей контейнером,
- посредством устройства, использующего датчики близости, расположенные на кране 18 и контейнере 3, автоматически фиксируют внутренний компонент 29 в вырезах 27 подвижных сцепных элементов 25 контейнера, а наружный компонент 28 - в вырезе на неподвижном сцепном элементе 26 контейнера,
- используя данные об указанных перемещениях, внесенные в запоминающее устройство, посредством крана 18 транспортного средства-мусоросборщика автоматически поднимают контейнер 3 в зону опоражнивания,
- надавливая на подвижный сцепной элемент 25 контейнера, поддерживающий основание контейнера, оператор откидывает это основание посредством вертикального выдвижения внутреннего компонента 29 вертикальных консолей 24 сцепляющего устройства 21,
- после удаления мусора оператор закрывает основание контейнера посредством вертикального перемещения внутреннего компонента 29 вертикальных консолей 24 сцепляющего устройства 21 в противоположную сторону,
- автоматически перемещают контейнер 3 из зоны опоражнивания в подземный бункер 4,
- автоматически отделяют внутренний компонент 29 от вырезов 27 в подвижных сцепных элементах 25 контейнера, а наружный компонент 28 - от выреза в неподвижном сцепном элементе 26 контейнера,
- под автоматизированным управлением со стороны оператора перемещают кран 18 в исходную позицию,
- автоматически закрывают крышку 2 подземной системы.
Для контейнеров с закрытым основанием опоражнивание контейнера в возможном варианте проводят следующим образом:
- автоматически открывают крышку 2 подземной системы,
- под автоматизированным управлением со стороны оператора перемещают кран 18 до тех пор, пока его верхняя часть не окажется над находящимся под землей контейнером,
- посредством устройства, использующего датчики близости, расположенные на кране 18 и контейнере 3, автоматически сцепляют наружные компоненты 28 сцепляющего устройства 21, находящегося в верхней части крана, и неподвижные сцепные элементы 31, прикрепленные к каждой боковой стороне контейнера,
- используя данные об указанных перемещениях, внесенные в запоминающее устройство, автоматически поднимают контейнер 3 к задней части транспортного средства-мусоросборщика,
- для опоражнивания контейнера под управлением со стороны оператора устанавливают его на задний подъемный (опрокидывающий) механизм,
- автоматически перемещают контейнер 3 из зоны опоражнивания в подземный бункер 4,
- автоматически расцепляют компоненты, присоединяющие контейнер 3 к крану 18,
- под автоматизированным управлением со стороны оператора перемещают кран 18 в исходную позицию,
- автоматически закрывают крышку 2 подземной системы.
На фиг.8 представлено описанное автоматическое устройство, сцепляющее кран 18 грузовика-мусоросборщика 17 и контейнер с закрытым основанием, опоражниваемый посредством опрокидывания. На каждой боковой стороне контейнер оборудован закрепленным сцепным элементом 31, у верхнего конца которого выполнен вырез 32, позволяющий осуществить сцепление с наружным компонентом 28 сцепляющего устройства 21.
Чтобы при извлечении контейнера 3 из внутреннего объема подземного бункера 4 предотвратить случайные падения в подземный бункер, на время извлечения отверстие бункера 4 полностью перекрывается предохранительным устройством. Пока контейнер 3 остается внутри бункера 4, указанное устройство прислонено к одной из стенок бункера. Когда контейнер 3 поднимают для опоражнивания, устройство разворачивается в горизонтальное положение, перекрывая отверстие бункера 4.
Для обеспечения возможности автоматического позиционирования и амортизации указанное предохранительное устройство, прикрепленное к одной из боковых стенок подземного бункера 4, снабжено поворотной планкой 35, пневматическим амортизатором 36 и амортизирующей пружиной 34. Когда предохранительное устройство во время извлечения контейнера 3 находится в горизонтальном положении, оно удерживается в закрепленном и стабильном положении двумя запорами 37, имеющимися на передней стенке бункера 4. Когда контейнер 3 снова оказывается внутри бункера 4, запоры 37 механическим образом раскрываются посредством двух педалей 38, одновременно отжимаемых контейнером 3, вынуждая устройство отклониться обратно в свою исходную позицию. Как можно видеть на фиг.9, где предохранительное устройство показано в наружном вертикальном положении, оно содержит подвижный компонент 33, присоединенный к задней стенке подземного бункера посредством узла, в состав которого входят поворотная планка 35, пневматический амортизатор 36 и амортизирующая пружина 34. На фиг.10 предохранительное устройство представлено в горизонтальном положении, в котором во время извлечения контейнера 3 отверстие подземного бункера 4 перекрыто. Подвижный компонент 33 присоединен к передней стенке бункера 4 двумя запорами 37, которые механическим образом отпираются при одновременном нажатии двух педалей 38.
Предусмотрена также возможность перевести указанное устройство вручную из внутреннего горизонтального положения в наружное вертикальное положение, открывающее доступ к подземному бункеру 4 для его очистки или текущего ремонта.
Верхнюю часть мусорной урны 1 можно удерживать в закрытом состоянии посредством запора 11. Это позволяет открывать урну только специальному кругу пользователей. Функционирование запора, позволяющее открыть верхнюю часть мусорной урны 1, обеспечивается за счет поднесения мобильного устройства к устройству 16 радиочастотной идентификации, размещенному в блоке, установленном на урну 1. Такое выполнение иллюстрируется фиг.4, на которой показаны мусорная урна 1, оборудованная блоком 16 радиочастотной идентификации, позволяющим, при поднесении к нему мобильного устройства, отпереть запор 11 урны 1. Вне наружного периметра крышки 2 системы находится другой блок 9 радиочастотной идентификации. Поднося к нему мобильное устройство, можно управлять перемещениями крышки.
Предусмотрена возможность отслеживать уровень мусора в контейнере с помощью мобильного датчика (или датчиков) 12, установленного (установленных) в крышке 2. Полученные таким образом данные передаются в микропроцессор, который вычисляет уровень мусора в процентах и через коммуникационное устройство посылает эту информацию в центр управления сбором мусора. Когда количество мусора достигает заданного значения, микропроцессор имеет возможность послать также сообщение, результатом которого будет активирование запирающего устройства 11 в мусорной урне 1 подземной системы.
На фиг.5 показана направляющая 13, прикрепленная к нижней стороне крышки 2 системы и позволяющая перемещать датчик 12 для отслеживания различных уровней мусора в различных частях подземного контейнера 3.
Кроме того, предусмотрена возможность отслеживать вес мусора, содержащегося в контейнере, посредством датчика 14 нагрузки, закрепленного в подземном бункере 4 под контейнером 3. Указанный датчик позволяет проводить непрерывное взвешивание контейнера 3 и находящегося внутри него мусора. Микропроцессор согласно заданному графику получает информацию по многократным взвешиваниям контейнера 3, вычисляет вес мусора в процентах и через коммуникационное устройство посылает полученный результат в центр управления сбором мусора.
Процедура взвешивания мусора, находящегося в подземной системе для сбора мусора, доступной только для определенных пользователей, может быть проведена в одном из двух вариантов:
- используя датчик 15 в нижней части урны 1, позволяющий проводить непрерывное взвешивание входной урны и находящегося в ней мусора, или
- используя датчик 39 нагрузки, позволяющий взвешивать пользователя и мусор, помещаемый, для сброса в контейнер, на крышку 2 подземной системы рядом с мусорной урной 1, причем пользователь, чтобы отпереть запор 11 на верхней части урны, должен поместить на крышку обе ноги.
Информация, поступившая от процедур взвешивания каждого нового объема мусора, обрабатывается микропроцессором, который вычисляет вес мусора в процентах и через коммуникационное устройство посылает полученный результат в центр управления сбором мусора.
На фиг.11 представлено устройство, предназначенное для измерения веса сбрасываемого мусора и содержащее датчик 39 нагрузки, позволяющий взвешивать пользователя и мусор, помещенный, перед сбрасыванием в урну, на крышку 2 подземной системы рядом с мусорной урной 1, которая на своем верхнем люке снабжена запором 11.
Процедура измерения объема мусора, помещаемого в урну, доступную только для определенных пользователей, может быть проведена также посредством комплекта датчиков, размещенных на внутренних стенках мусорной урны. С помощью указанных датчиков определяют примерный объем помещаемого в урну пакета.
Для специалистов в данной области будет понятно, что возможны многочисленные изменения, не выходящие за границы прилагаемой формулы изобретения.
Реферат
Система содержит независимые модули для различного типа собираемого мусора, состоящие в своей подземной зоне из бункера и контейнера для извлечения мусора краном, а на поверхности - из поста с используемой определенными пользователями входной урной с откидывающейся вверх крышкой. Система содержит средство для открывания и закрывания крышки, предохранительные устройства с подвижным компонентом, прислоненным к стенке бункера при нахождении контейнера внутри бункера и выполненным с возможностью автоматически разворачиваться при извлечении контейнера в горизонтальное положение с перекрытием отверстия бункера. Система содержит также средство для открывания и закрывания входной урны, сцепляющее устройство, присоединенное к стреле крана и обеспечивающее возможность автоматического подъема и переноса контейнера в зону опоражнивания. При этом сцепляющее устройство содержит горизонтальную балку и две вертикальные консоли, выполненные с возможностью вертикального перемещения гидроцилиндрами. Каждая консоль содержит наружный компонент, имеющий на конце захват для сцепления, средства автоматического прицепления контейнера к крану, неподвижные сцепные элементы которого присоединены к корпусу контейнера на каждой его боковой стороне и имеют на верхних концах вырезы для сцепления с наружным компонентом консоли. Изобретение обеспечивает повышение удобства пользования и безопасности. 14 з.п. ф-лы, 12 ил.
Формула
- средство для открывания и закрывания крышки (2),
- предохранительное устройство, содержащее подвижный компонент (33), который прислонен к стенке бункера (4), когда контейнер (3) находится внутри бункера, и выполнен с возможностью автоматически разворачиваться при извлечении контейнера (3) в горизонтальное положение с перекрытием отверстия бункера (4);
- средство для открывания и закрывания входной урны (1),
- сцепляющее устройство (21), присоединенное к стреле крана (18) грузовика-мусоросборщика (17) и обеспечивающее возможность автоматического подъема и переноса контейнера в зону опоражнивания, при этом сцепляющее устройство (21) содержит горизонтальную балку (23) и две вертикальные консоли (24), выполненные с возможностью вертикального перемещения посредством гидроцилиндров, а каждая из двух вертикальных консолей (24) сцепляющего устройства (21) содержит наружный компонент (28), который имеет на своем конце захват (30') для осуществления сцепления, и
- средства для автоматического прицепления контейнера (3) к крану (18), содержащие неподвижные сцепные элементы (26, 31), присоединенные к корпусу контейнера (3) на каждой его боковой стороне и снабженные у своих верхних концов вырезом (27', 32), обеспечивающим возможность сцепления каждого неподвижного сцепного элемента с наружным компонентом (28) вертикальной консоли (24) посредством сопряжения наружного компонента (28) с вырезом (27', 32) на неподвижном сцепном элементе (26, 31).
- указанное средство дополнительно содержит стопорный болт (7), установленный вертикально и предотвращающий поворот язычка центрального запора (6) в случае наружных вибраций, способный привести к нежелательному открыванию крышки (2);
- цилиндры (8) подключены к управляющей кнопке (40), расположенной у поверхности и позволяющей автоматически закрывать крышку посредством стравливания газа из цилиндров в камеру (41),
- цилиндры (8) получают энергию от устройства, питающего их за счет солнечной энергии и содержащего одну или более фотоэлектрических панелей (10), и
- дистанционное управление перемещениями крышки (2) и крана (18) обеспечивается с использованием единого устройства посредством кнопок непрерывного управления.
контейнер (3) полностью открыт на верхней стороне, а его основание (19) для обеспечения возможности опоражнивания контейнера (3) снизу шарнирно связано с корпусом контейнера петлями (20),
указанные средства для автоматического прицепления дополнительно содержит подвижные сцепные элементы (25), каждый из которых помещен внутри неподвижного сцепного элемента (26) и имеет в своей верхней части сцепляющийся вырез (27), при этом указанные сцепные элементы (25, 26) своими нижними концами присоединены к основанию (19) контейнера (3),
- каждая из двух вертикальных консолей (24) сцепляющего устройства (21) содержит внутренний компонент (29), имеющий на своем конце захват (30') для осуществления сцепления с подвижным сцепным элементом (25) посредством сопряжения с указанным вырезом (27) на указанном сцепном элементе, при этом
- возможность открывания и закрывания основания (19) контейнера для его опоражнивания от мусора обеспечивается вертикальным перемещением внутреннего компонента (29) вертикальных консолей (24) сцепляющего устройства (21) посредством гидроцилиндров с проталкиванием или протягиванием подвижного сцепного элемента (25).
мобильный датчик (12), способный обнаруживать близкие к нему объекты и установленный в расположенной на крышке (2) направляющей (13), обеспечивающей возможность его перемещения для измерения различных уровней заполнения в различных частях подземного контейнера (3),
микропроцессор, способный получать информацию о различных уровнях заполнения контейнера (3), вычислять объем мусора в процентах, посылать полученный результат через коммуникационное устройство в центр управления сбором мусора и при достижении указанным объемом заданной величины, посылать сообщение, обеспечивающее активирование запирающего устройства (11) во входной урне (1) подземной системы.
Документы, цитированные в отчёте о поиске
Устройство для сбора отходов
Комментарии