Погрузочно-разгрузочное устройство транспортабельного контейнера - RU168036U1
Код документа: RU168036U1
Чертежи




Описание
Полезная модель относится к машиностроению и может быть использована в конструкциях большегрузных транспортабельных контейнеров для их подъема и опускания при осуществлении процессов погрузки-разгрузки с автомобильных и железнодорожных платформ, а также для горизонтирования и установки транспортабельных контейнеров на высоте, облегчающей разгрузку и погрузку в них грузов.
Известно погрузочно-разгрузочное устройство транспортабельного модуля-контейнера для подъема транспортабельных модулей-контейнеров на шасси транспортных средств и опускания их на площадку хранения, содержащее грузоподъемные стойки, каждая из которых имеет закрепленный на корпусе модуля-контейнера силовой корпус с выдвижной гидравлической опорой одностороннего действия, имеющей гидроцилиндр с выдвижным штоком, оснащенный опорной плитой, и источник гидропитания, включающий в себя емкость с рабочей жидкостью, гидронасос, магистраль низкого давления с обратным клапаном, соединяющую емкость с гидронасосом, напорную магистраль, соединяющую гидронасос с рабочей полостью гидроцилиндра, магистраль слива рабочей жидкости из гидроцилиндра, гидрозамок с управляемым отсечным клапаном и распределитель с ручным приводом для управления процессом выдвижения опоры. В устройстве каждая грузоподъемная стойка оснащена собственным источником гидропитания, все агрегаты которого закреплены на силовом корпусе стойки. Кроме того, каждая стойка оснащена средством для уборки выдвижного штока в транспортное положение, включающее привод, связанный гибкой связью с нижней частью выдвижного штока, и ручную лебедку (см. патент RU 2211793, В65D 90/14, В60Р 1/64 15.01.2002). Данное устройство позволяет перемещать транспортабельный модуль-контейнер с шасси транспортного средства на площадку хранения и обратно.
Грузоподъемные стойки перевозятся на тележке отдельно от передвижного блока гидропитания, и вся система монтируется заново при обслуживании каждого транспортабельного модуля-контейнера.
Недостатками данного погрузочно-разгрузочного устройства являются большое время подготовки к разгрузке-погрузке, большие затраты на установку погрузочно-разгрузочного устройства на транспортабельном контейнере и то, что его нельзя использовать на неподготовленных площадках, поскольку стойки и блок гидропитания перевозятся на тележке отдельно и вся система монтируется заново при обслуживании каждого транспортабельного контейнера. Кроме того, при подъеме контейнера все нагрузки воспринимаются непосредственно гидроцилиндром, что приводит к увеличению его массы и стоимости. Шток гидроцилиндра не защищен от повреждений при внешних воздействиях, что снижает надежность погрузочно-разгрузочного устройства. Для подъема штока, требуется использование ручного труда по вращению рукоятки лебедки.
Низкий технический уровень данного погрузочно-разгрузочного устройства транспортабельного контейнера обусловлен тем, что оно не может транспортироваться вместе с контейнером, а перевозится на тележке отдельно и монтируется заново при обслуживании каждого транспортабельного контейнера. Шток гидроцилиндра не защищен от боковых нагрузок и повреждений при внешних воздействиях, что снижает надежность погрузочно-разгрузочного устройства. Применен гидроцилиндр одностороннего действия, для подъема штока используется ручная лебедка.
Задачей заявленного погрузочно-разгрузочное устройства транспортабельного контейнера является создание такого нового устройства, которое обеспечивает его транспортировку вместе с контейнером и быстрое приведение в рабочее положение без использования тяжелого ручного труда.
Технический результат - сокращение времени погрузки-разгрузки, расширение возможности использования транспортабельного контейнера, повышение надежности погрузочно-разгрузочного устройства за счет новой конструкции силового корпуса грузоподъемной стойки с телескопическим выдвижным элементом, позволяющим исключить боковые нагрузки на гидроцилиндр и защитить его шток от внешних воздействий.
Поставленный технический результат достигается тем, что в погрузочно-разгрузочном устройстве транспортабельного контейнера содержатся грузоподъемные стойки, каждая из которых имеет силовой корпус, включающий в себя гидроцилиндр с выдвижным штоком, опорную плиту и источник гидропитания, состоящий из емкости с рабочей жидкостью, гидронасоса, напорной магистрали, магистрали слива, гидрозамка, распределителя, причем каждая грузоподъемная стойка оснащена собственным источником гидропитания, все агрегаты которого закреплены на силовом корпусе стойки, а силовой корпус каждой грузоподъемной стойки выполнен в виде прямоугольной рамы, установленной на транспортабельном контейнере с возможностью поворота вокруг вертикальной оси и содержащей ручной фиксатор угла поворота, и телескопический выдвижной элемент, воспринимающий боковые нагрузки, опорная плита которого соединена шарниром со штоком, установленным внутри телескопического выдвижного элемента гидроцилиндра двухстороннего действия, рабочие полости которого соединены шлангами с дросселирующим распределителем с электрическим управлением, соединенным проводами с пультом управления, установленном в шкафу, который закреплен на транспортабельном контейнере и содержит указатель положения контейнера относительно горизонтальной плоскости и электрический кабель с разъемом с подключаемыми к нему зажимами типа "крокодил".
Причем пульт управления содержит поворотную рамку с ручкой и горизонтальной прямоугольной прорезью, в которой с зазором расположены поворотные рычажки, имеющие возможность поворачиваться относительно горизонтальной оси поворотной рамки и относительно собственных вертикальных осей для регулировки напряжения на электромагнитах дросселирующих распределителей грузоподъемных стоек.
Вследствие того что погрузочно-разгрузочное устройство содержит грузоподъемные стойки, имеющие силовые корпуса, выполненные в виде прямоугольной рамы, установленной на транспортабельном контейнере с возможностью поворота вокруг вертикальной оси и снабженные фиксатором угла поворота, обеспечивается возможность быстрого складывания-раскладывания грузоподъемных стоек и транспортирования их вместе с контейнером, что расширяет возможности использования контейнера и сокращает время, затрачиваемое на погрузку и разгрузку контейнера.
Благодаря тому что управление всеми грузоподъемными стойками контейнера осуществляется с одного пульта управления, установленного в шкафу, который закреплен на транспортабельном контейнере и содержит указатель положения контейнера относительно горизонтальной плоскости, электрический кабель с разъемом с подключаемыми к нему зажимами типа "крокодил", обеспечивается возможность управления процессами погрузки-разгрузки и горизонтирования контейнера одним оператором, а также его подключение к стационарному источнику питания или к аккумулятору автомобиля, что расширяет возможности использования транспортабельного контейнера и позволяет повысить надежность погрузочно-разгрузочного устройства.
Вследствие того что каждая грузоподъемная стойка имеет силовой корпус с телескопическим выдвижным элементом, воспринимающим боковые нагрузки на гидроцилиндр и защищающим его шток от внешних воздействий, повышаетсяь надежность погрузочно-разгрузочного устройства.
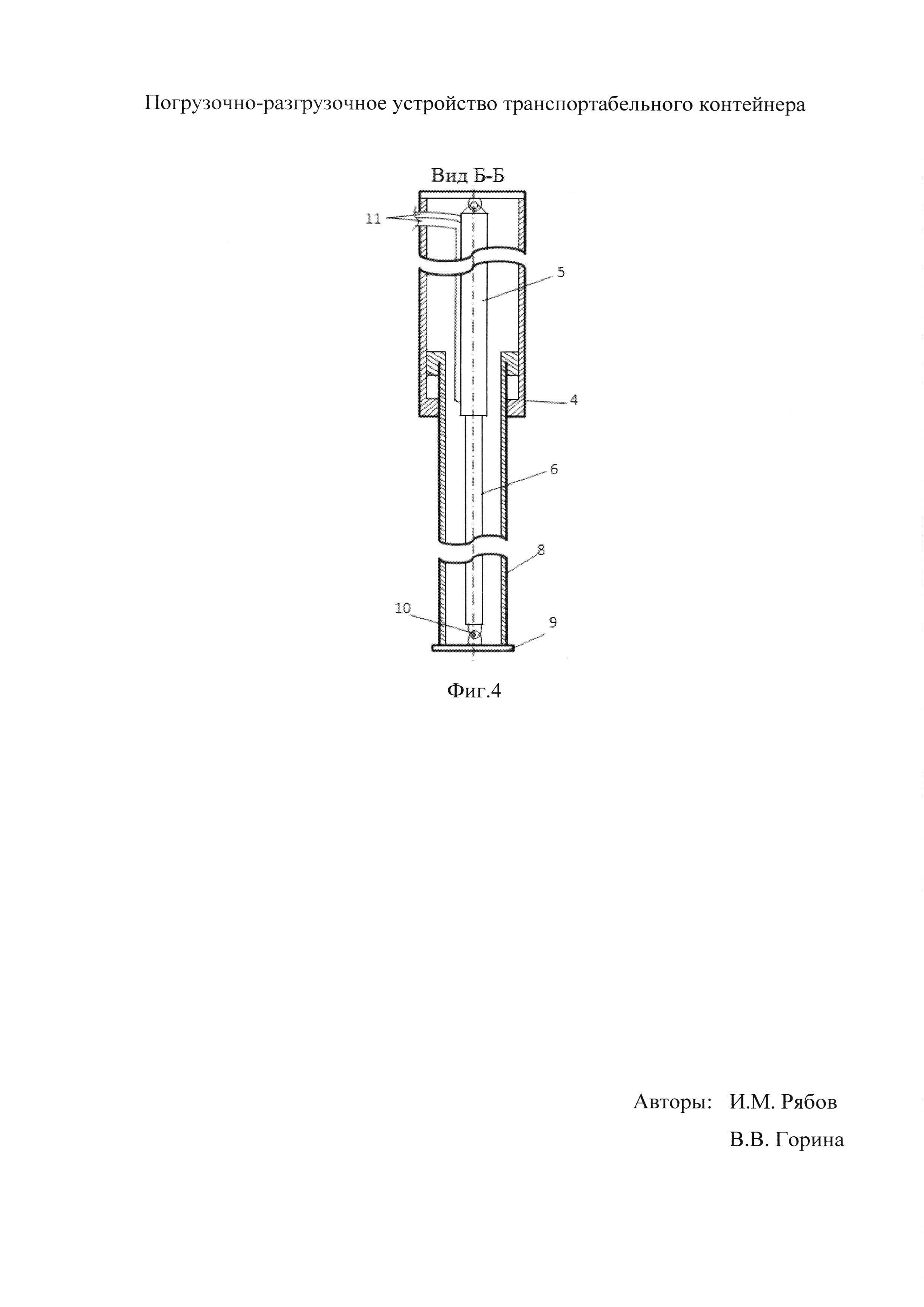
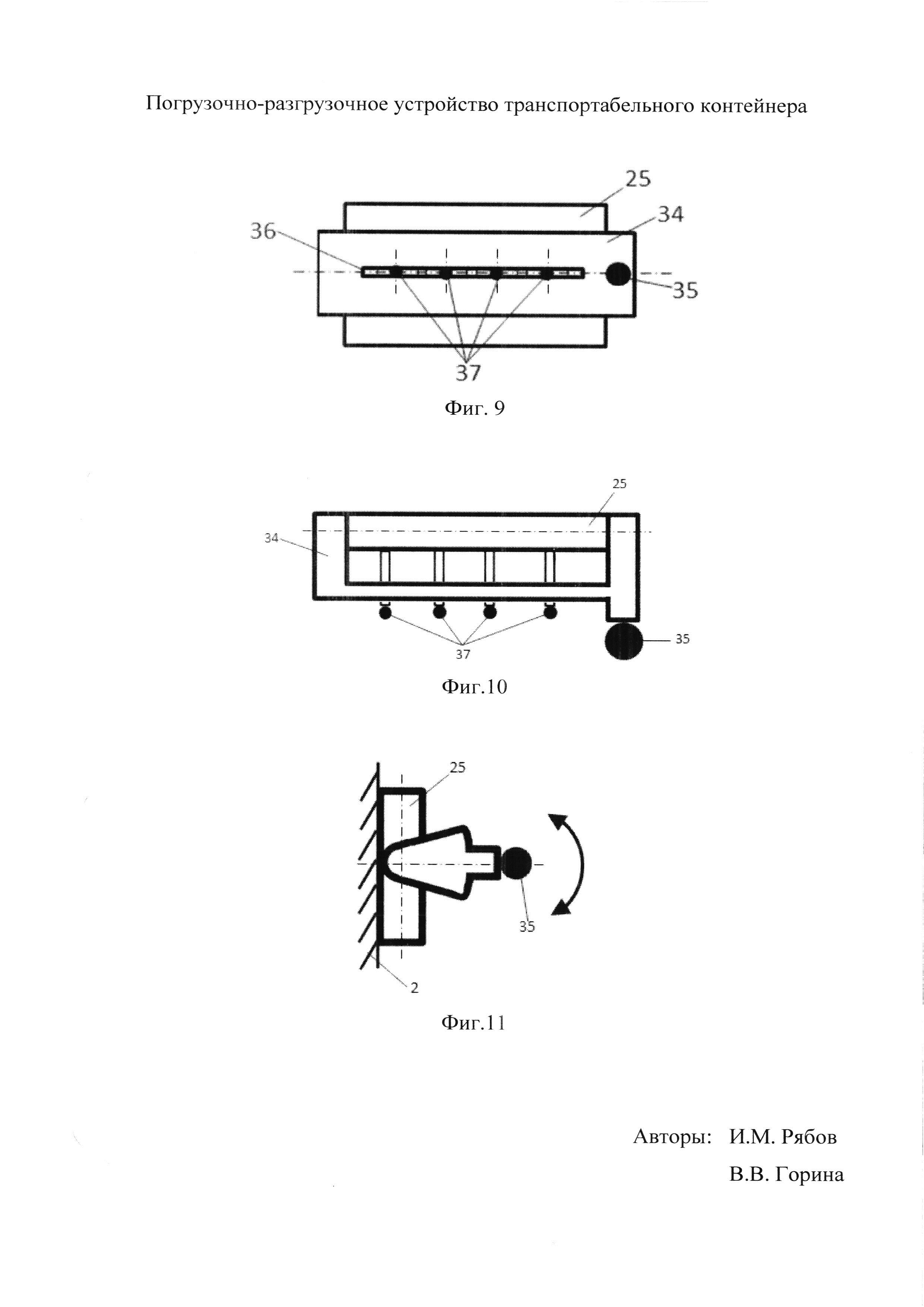
На фиг. 1 изображен вид сверху транспортабельного контейнера, оборудованного предлагаемым погрузочно-разгрузочным устройством с грузоподъемными стойками; на фиг. 2 - вид справа транспортабельного контейнера, оборудованного предлагаемым погрузочно-разгрузочным устройством с грузоподъемными стойками при выдвинутом положении штоков; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - вид спереди транспортабельного контейнер, оборудованного предлагаемым погрузочно-разгрузочным устройством с грузоподъемными стойками при выдвинутом положении штоков; на фиг. 6 показана конструкция ручного фиксатора угла поворота рамы грузоподъемной стойки; на фиг. 7 показан указатель положения транспортабельного контейнера относительно горизонтальной плоскости; на фиг. 8 показана гидравлическая схема погрузочно-разгрузочного устройства транспортабельного контейнера; на фиг. 9 - вид спереди на пульт управления транспортабельного контейнера; фиг. 10 - вид сверху на пульт управления транспортабельного контейнера; фиг. 11 - вид сбоку на пульт управления транспортабельного контейнера.
Погрузочно-разгрузочное устройство транспортабельного контейнера содержит грузоподъемные стойки 1 (фиг. 1), закрепленные на корпусе 2 контейнера. Обычно используют четыре грузоподъемные стойки, которые закрепляют по углам. Однако для модулей-контейнеров повышенной вместимости количество грузоподъемных стоек может быть увеличено до шести-восьми, при этом добавочные стойки закрепляют в средней части корпуса модуля-контейнера.
Каждая грузоподъемная стойка 1 имеет силовой корпус 3, выполненный в виде прямоугольной рамы 4 (фиг. 2), установленной на корпусе 2 контейнера с возможностью поворота вокруг вертикальной оси и включающей в себя гидроцилиндр 5 (фиг. 4) с выдвижным штоком 6, ручной фиксатор угла поворота 7 (фиг. 6), выполненный в виде шпингалета, телескопический выдвижной элемент 8 (фиг. 4), воспринимающий боковые нагрузки, опорная плита 9 которого соединена шарниром 10 со штоком 6 гидроцилиндра 5 двухстороннего действия, установленным внутри телескопического выдвижного элемента 8. Такая конструкция устройства позволяет сократить время погрузки-разгрузки, расширить возможности использования транспортабельного контейнера, повысить надежность погрузочно-разгрузочного устройства. Рабочие полости гидроцилиндра соединены шлангами 11 с дросселирующим распределителем 12 (фиг. 8).
Источник гидропитания 13 (фиг. 2) включает в себя емкость с рабочей жидкостью 14, гидронасос 15, соединенный напорной магистралью 16 (фиг. 8) с дросселирующим распределителем 12, фильтр 17, соединенный магистралью слива 18 с дросселирующим распределителем 12, гидрозамок 19, обратный клапан 20, дроссель 21, предохранительный клапан нагнетания 22, предохранительный клапан слива 23. Дросселирующие распределители 12 каждой грузоподъемной стойки 1 соединены проводами 24 (фиг. 1) с пультом управления 25. Каждая грузоподъемная стойка оснащена собственным источником гидропитания 13 (фиг. 2), все агрегаты которого закреплены на силовом корпусе 3.
Пульт управления 25 (фиг. 5) установлен в закрепленном на корпусе 2 контейнера шкафу 26, который содержит еще указатель положения 27 контейнера относительно горизонтальной плоскости и электрический кабель с разъемом 28 с подключаемыми к нему зажимами типа "крокодил" 29, обеспечивающими подключение к стационарному источнику питания или к аккумулятору автомобиля. Это позволяет сократить время погрузки-разгрузки и расширить возможности использования транспортабельного контейнера.
Оснащение контейнера грузоподъемными стойками 1 (фиг. 2) позволяет при проведении погрузочно-разгрузочных работ поднять контейнер выше уровня погрузочной площадки 30 шасси 31 транспортного средства. Горизонтальность положения контейнера перед началом работы, а также в процессе подъема и опускания достигается установленным в шкафу 26 (фиг. 5) указателем положения 27, например, ампулы уровня 32 (фиг. 7). В горизонтальном положении пузырек воздуха 33 находится в центре ампулы уровня 32, а при отклонении корпуса 2 контейнера от горизонтального положения пузырек воздуха 33 смещается от центра ампулы уровня 32 тем больше, чем больше отклонение.
Пульт управления 25 содержит поворотную рамку 34 (фиг. 9) с ручкой 35 (фиг. 11) и горизонтальной прямоугольной прорезью 36 (фиг. 9), в которой с зазором расположены поворотные рычажки 37, имеющие возможность поворачиваться относительно горизонтальной оси поворотной рамки 34 (фиг. 10) и относительно собственных вертикальных осей для регулировки напряжения на электромагнитах дросселирующих распределителей 12 грузоподъемных стоек 1. Поворотная рамка 34 удерживается в среднем положении пружиной. Это приводит к расширению возможности использования транспортабельного контейнера.
При погрузке транспортабельного контейнера 2 с площадки хранения на погрузочную площадку 30 шасси 31 транспортного средства (фиг. 2) грузоподъемные стойки 1 переводят в рабочее положение. Рабочее положение грузоподъемных стоек достигается за счет ручного поворота силовых корпусов 3 на 90 градусов относительного корпуса 2 контейнера и их фиксации с помощью ручного фиксатора угла поворота 7 (фиг. 2). Электрический кабель 28 (фиг. 5), расположенный в шкафу 26, подключается к стационарному источнику питания или к аккумулятору автомобиля с помощью штатного разъема или разъемов типа "крокодил" 29. Для выдвижения грузоподъемных стоек 1 на пульте управления поворотные рычажки 37 переводят в среднее положение и поворачивают ручку 35 поворотной рамки 34 в крайнее верхнее положение, что вызывает подачу напряжения на правые электромагниты дросселирующих распределителей 12 (фиг. 8) всех грузоподъемных стоек 1 (фиг. 2). При этом в каждой грузоподъемной стойке 1 от насоса 15 (фиг. 8) по напорной магистрали 16 подается жидкость через дроссель 21 и обратный клапан 20, гидрозамок 19 в рабочую полость гидроцилиндра 5, которая начинает выдвигать выдвижной шток 6 (фиг. 5) вместе с телескопическим выдвижным элементом 8 и опорной плитой 9. При этом жидкость из подпоршневой рабочей полости гидроцилиндра 5 (фиг. 8) через дросселирующий распределитель 12 и фильтр 17 сливается в емкость с рабочей жидкостью 14. В случае засорения фильтра 17 срабатывает предохранительный клапан слива 23. В случае превышения допустимого давления в напорной магистрали 16 срабатывает предохранительный клапан нагнетания 22. Интенсивность подъема корпуса 2 контейнера зависит от величины напряжения, подаваемого на все электромагниты дросселирующих распределителей 12 грузоподъемных стоек 1, которое определяется углом поворота поворотной рамки 34 от ее среднего положения, в котором она удерживается пружиной. Кроме того, интенсивность подъема каждой грузоподъемной стойки 1 в свою очередь зависит от угла поворота соответствующего поворотного рычажка 37, что позволяет в процессе подъема, ориентируясь на положение пузырька воздуха 33 ампулы уровня 32, поддерживать горизонтальное положение корпуса 2 контейнера (фиг. 7). После подъема корпуса 2 контейнера (фиг. 5) выше уровня погрузочной площадки 30 шасси 31 транспортного средства (фиг. 2) ручка 35 поворотной рамки 34 переводится в среднее положение и подача напряжения на электромагниты дросселирующих распределителей 12 (фиг. 8) прекращается. Дросселирующий распределитель 12 каждой грузоподъемной стойки 1 с помощью пружины возвращается в исходное положение, при котором все магистрали перекрыты, и гидравлический цилиндр 5 не перемещается и блокируется. После заезда шасси 31 транспортного средства (фиг. 2) под корпус 2 контейнера ручка 35 поворотной рамки 34 переводится в крайнее нижнее положение и подается напряжение на левый электромагнит дросселирующего распределителя 12 (фиг. 8). При этом напорная магистраль 16 подсоединяется к штоковой рабочей полости гидравлического цилиндра 5 и к гидрозамку 19, открывая его. Поршневая рабочая полость гидравлического цилиндра 9 через дроссель 21 и дросселирующий распределитель 12 соединяется с магистралью слива 18, а шток 6 гидроцилиндра 5 втягивается вовнутрь, и происходит процесс опускания корпуса 2 контейнера, скорость которого определяется дросселем 21. После опускания корпуса 2 контейнера на погрузочную площадку 30 шасси 31 транспортного средства шток 6 гидроцилиндра 5 продолжает втягиваться до крайнего верхнего положения. Затем ручка 35 поворотной рамки 34 переводится в среднее положение и подача напряжения на электромагнит дросселирующего распределителя 12 каждой грузоподъемной стойке 1 прекращается. Ручные фиксаторы угла поворота 7 поднимаются, силовые корпуса 3 поворачиваются в направлении корпуса 2 контейнера (фиг. 2) и вновь фиксируются ручными фиксаторами угла поворота 7 во избежание их поворота во время движения транспортного средства.
При разгрузке транспортабельного контейнера 2 с погрузочной площадки 30 (фиг. 2) на площадку хранения (фиг. 5) грузоподъемные стойки 1 переводят в рабочее положение. Рабочее положение грузоподъемных стоек достигается за счет ручного поворота силовых корпусов 3 на 90 градусов относительного корпуса 2 контейнера и их фиксации с помощью ручного фиксатора угла поворота 7 (фиг. 2). Электрический кабель 28 (фиг. 5), расположенный в шкафу 26, подключается к стационарному источнику питания или к аккумулятору автомобиля с помощью штатного разъема или разъемов типа "крокодил" 29. Для выдвижения грузоподъемных стоек 1 на пульте управления поворотные рычажки 37 переводят в среднее положение и поворачивают ручку 35 поворотной рамки 34 в крайнее верхнее положение, что вызывает подачу напряжения на правые электромагниты дросселирующих распределителей 12 (фиг. 8) всех грузоподъемных стоек 1 (фиг. 2). При этом в каждой грузоподъемной стойке 1 от насоса 15 (фиг. 8) по напорной магистрали 16 подается жидкость через дроссель 21 и обратный клапан 20, гидрозамок 19 в рабочую полость гидроцилиндра 5, которая начинает выдвигать выдвижной шток 6 (фиг. 5) вместе с телескопическим выдвижным элементом 8 и опорной плитой 9. При этом жидкость из подпоршневой рабочей полости гидроцилиндра 5 (фиг. 8) через дросселирующий распределитель 12 и фильтр 17 сливается в емкость с рабочей жидкостью 14. В случае засорения фильтра 17 срабатывает предохранительный клапан слива 23. В случае превышения допустимого давления в напорной магистрали 16 срабатывает предохранительный клапан нагнетания 22. Интенсивность подъема корпуса 2 контейнера зависит от величины напряжения, подаваемого на все электромагниты дросселирующих распределителей 12 грузоподъемных стоек 1, которое определяется углом поворота поворотной рамки 34 от ее среднего положения, в котором она удерживается пружиной. Кроме того, интенсивность подъема каждой грузоподъемной стойки 1 в свою очередь зависит от угла поворота соответствующего поворотного рычажка 37, что позволяет в процессе подъема, ориентируясь на положение пузырька воздуха 33 ампулы уровня 32 поддерживать горизонтальное положение корпуса 2 контейнера (фиг. 7). После подъема корпуса 2 контейнера (фиг. 5) выше уровня погрузочной площадки 30 шасси 31 транспортного средства (фиг. 2) ручка 35 поворотной рамки 34 переводится в среднее положение и подача напряжения на электромагниты дросселирующих распределителей 12 (фиг. 8) прекращается. Дросселирующий распределитель 12 каждой грузоподъемной стойки 1 с помощью пружины возвращается в исходное положение, при котором все магистрали перекрыты, и гидравлический цилиндр 5 не перемещается и блокируется. После отъезда шасси 31 транспортного средства (фиг. 2) из-под корпуса 2 контейнера ручка 35 поворотной рамки 34 переводится в крайнее нижнее положение и подается напряжение на левый электромагнит дросселирующего распределителя 12 (фиг. 8). При этом напорная магистраль 16 подсоединяется к штоковой рабочей полости гидравлического цилиндра 5 и к гидрозамку 19, открывая его. Поршневая рабочая полость гидравлического цилиндра 9 через дроссель 21 и дросселирующий распределитель 12 соединяется с магистралью слива 18, а шток 6 гидроцилиндра 5 втягивается вовнутрь, и происходит процесс опускания корпуса 2 контейнера, скорость которого определяется дросселем 21. После опускания корпуса 2 контейнера на площадку хранения шток 6 гидроцилиндра 5 продолжает втягиваться до крайнего верхнего положения. Затем ручка 35 поворотной рамки 34 переводится в среднее положение и подача напряжения на электромагнит дросселирующего распределителя 12 каждой грузоподъемной стойке 1 прекращается. Ручные фиксаторы угла поворота 7 поднимаются, силовые корпуса 3 поворачиваются в направлении корпуса 2 контейнера (фиг. 2) и вновь фиксируются ручными фиксаторами угла поворота 7.
Заявленное погрузочно-разгрузочное устройство транспортабельного контейнера может быть изготовлено на любом машиностроительном заводе, а также во многих предприятиях по ремонту контейнеров.
Таким образом, создание такого нового погрузочно-разгрузочного устройства транспортабельного контейнера обеспечивает его транспортировку вместе с контейнером и быстрое приведение в рабочее положение без использования тяжелого ручного труда. Это приводит к сокращению времени погрузки-разгрузки, расширению возможности использования транспортабельного контейнера, повышению надежности погрузочно-разгрузочного устройства за счет новой конструкции силового корпуса грузоподъемной стойки с телескопическим выдвижным элементом, позволяющим исключить боковые нагрузки на гидроцилиндр и защитить его шток от внешних воздействий.
Реферат
Полезная модель относится к машиностроению и может быть использована в конструкциях большегрузных транспортабельных контейнеров.Технический результат - сокращение времени погрузки-разгрузки, расширение возможности использования транспортабельного контейнера, повышение надежности погрузочно-разгрузочного устройства за счет новой конструкции силового корпуса грузоподъемной стойки с телескопическим выдвижным элементом.Погрузочно-разгрузочное устройство транспортабельного контейнера содержит грузоподъемные стойки с собственным источником гидропитания, каждая из которых имеет силовой корпус в виде прямоугольной рамы, установленной на транспортабельном контейнере с возможностью поворота вокруг вертикальной оси и содержащей ручной фиксатор угла поворота, и телескопический выдвижной элемент, опорная плита которого соединена шарниром со штоком гидроцилиндра двухстороннего действия, установленным внутри телескопического выдвижного элемента. Пульт управления дросселирующими распределителями установлен в шкафу, закрепленном на транспортабельном контейнере.
Комментарии