Способ определения нежелательных условий для функционирования плавающей крыши резервуара - RU2619808C2
Код документа: RU2619808C2
Чертежи


Описание
Область техники
Изобретение относится к способу идентификации нежелательных условий для функционирования плавающей крыши резервуара.
Уровень техники
В наружных резервуарах-хранилищах с плавающей крышей крыша способна плавать на поверхности продукта, хранящегося в резервуаре. При этом известно использование систем для мониторинга плавающих крыш резервуаров.
Назначение систем такого типа состоит в обеспечении контроля состояния плавающей крыши, чтобы гарантировать детектирование опасных ситуаций, возникающих, когда крыша не плавает на поверхности продукта правильным образом. При этом обеспечиваются также преимущества, связанные с требованиями охраны окружающей среды, например с предотвращением испарения летучих углеводородов в окружающую среду в случае, если крыша будет залита продуктом. Наконец, система мониторинга может устранить или по меньшей мере уменьшить потребность в инспекционных мероприятиях. В типичной ситуации понтоны плавающей крыши должны инспектироваться на предмет утечки ежегодно или даже каждый квартал человеком, который должен открывать люки в понтонах. Работа такого типа связана с рисками для человека, причем ее объем может быть минимизирован с помощью системы наклона крыши.
Отслеживаемое расстояние между плавающей крышей и поверхностью продукта обычно является, по существу, постоянным. Допустимы небольшие отклонения на уровне нескольких сантиметров вследствие внешних факторов, например ветра, дождя или снега, но отклонения, превышающие определенный порог (например более 5 см в некоторых приложениях), как правило, указывают на какой-то дефект или нежелательное условие.
Представляется желательным обеспечить функцию диагностики с целью предсказания условий серьезной неисправности, чтобы иметь возможность принять меры в отношении этих условий до того, как произойдет аварийный случай.
Раскрытие изобретения
Изобретение направлено на обеспечение подобной функции диагностики. Эта и другие задачи решены созданием способа, включающего:
а) определение уровня заполнения резервуара продуктом путем посылки в резервуар электромагнитных сигналов и приема электромагнитных эхо-сигналов, отраженных поверхностью продукта,
b) детектирование референтного расстояния между референтной позицией на крыше и указанной поверхностью с использованием установленного на крыше указателя уровня,
c) определение отклонения референтного расстояния как разности между указанным референтным расстоянием и ожидаемым значением,
d) сопоставление отклонения референтного расстояния с заданным интервалом,
e) если отклонение референтного расстояния находится вне заданного интервала, сохранение в памяти набора данных, включающего указанное отклонение референтного расстояния и указанный уровень заполнения,
f) повторение шагов а)-е) для множества моментов времени,
g) идентифицирование, по сохраненным в памяти наборам данных об отклонениях референтных расстояний и уровнях заполнения, указанного нежелательного условия.
"Нежелательное" условие может соответствовать потенциальному или реальному дефекту. В качестве дефекта может рассматриваться не только неисправность, критичная с точки зрения безопасности или управляемости, но также и неисправность, влияющая на точность измерений и на надежность. Неисправность последнего типа может не требовать выдачи тревожного сигнала, но в результате диагностирования таких неисправностей или возможности их возникновения может быть достигнуто улучшенное функционирование используемого указателя уровня.
Согласно изобретению отклонение референтного расстояния определяют как разность между детектированным референтным расстоянием и ожидаемым значением. Для каждого отклонения, выходящего за пределы заданного интервала, производят сохранение в памяти детектированного референтного расстояния и уровня заполнения, при этом множество наборов этих параметров подвергают анализу, используемому, чтобы идентифицировать нежелательное условие (наличие дефекта).
Изобретение основано на осознании достаточности хранения в памяти именно таких наборов данных, а не больших объемов информации о референтных расстояниях и уровнях заполнения. Таким образом, изобретение предлагает экономичный способ обеспечения диагностики плавающей крыши резервуара.
Благодаря ассоциированию любого отклонения расстояния с детектированным уровнем заполнения может быть получена информация, которая идентифицирует наличие дефекта. Таким образом, появляется возможность осуществить диагностику функционирования крыши резервуара и своевременно инициировать специальные измерения или ремонт.
Значения, входящие в каждый набор данных, предпочтительно определяют, по существу, одновременно. На практике шаги а) и b) могут осуществляться за время, меньшее 0,1 с или даже меньшее 0,01 с.
Заданный интервал в типичном случае составляет ±2-20 см, например ±3-6 см. Следует отметить, что этот интервал необязательно должен быть симметричным. Возможно, более значительные отклонения будут допустимы, когда они превышают ожидаемое значение или являются меньшими, чем это значение. При этом при заполнении резервуара может быть использован первый заданный интервал, а при опустошении резервуара - второй заданный интервал. Точное значение интервала будет зависеть от таких факторов, как конструкция системы и срок ее использования.
Шаг b) предпочтительно осуществляют по меньшей мере в трех зонах, выбранных на крыше. Это позволяет обнаружить отклонение крыши от горизонтального положения и определить степень подобного отклонения (если оно имеется). Такое отклонение также соответствует нежелательному условию.
Краткое описание чертежей
Далее изобретение будет описано более подробно, со ссылками на прилагаемые чертежи, иллюстрирующие предпочтительные варианты изобретения.
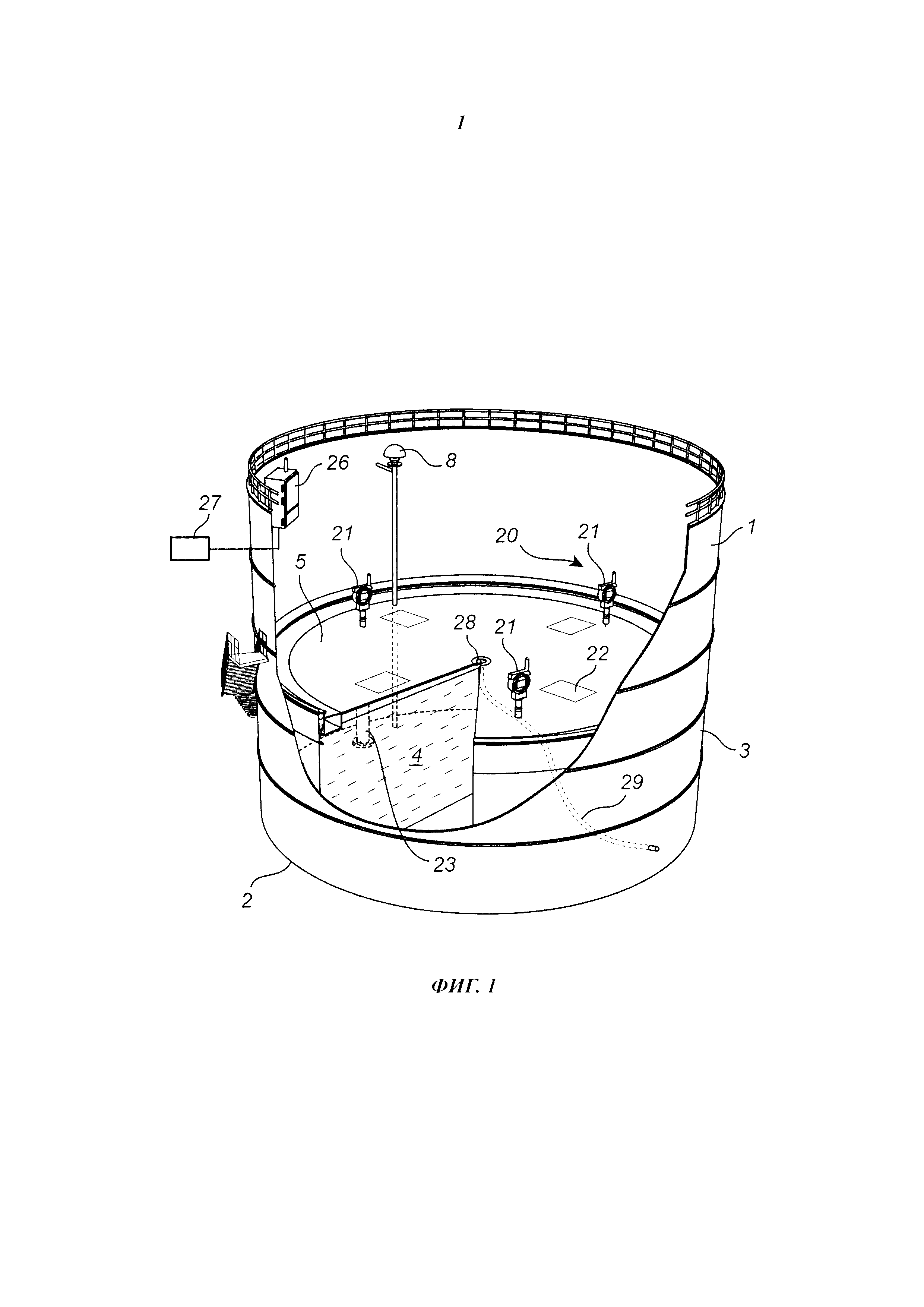
На фиг. 1 представлено упрощенное перспективное изображение резервуара с плавающей крышей и системы мониторинга крыши, пригодной для осуществления изобретения.
На фиг. 2 показана, на виде сбоку, в разрезе, часть резервуара по фиг. 1.
На фиг. 3 приведена блок-схема системы управления согласно варианту изобретения.
На фиг. 4 приведена блок-схема способа согласно варианту изобретения.
Осуществление изобретения
Далее будет описан вариант изобретения, относящийся к системе мониторинга плавающей крыши типа описанной в неопубликованной патентной заявке США №13/294,364, содержание которой включено в данное описание посредством ссылки.
На фиг. 1-2 изображен крупный резервуар 1 с плавающей крышей, у которого имеются дно 2 и боковая стенка 3. Резервуар 1 изготовлен из стали; его диаметр может составлять десятки метров. Резервуар содержит продукт 4, такой как жидкая нефть или нефтепродукт. Плавающая крыша 5 плавает на поверхности продукта 4 благодаря интегрированным в нее поплавкам (понтонам).
Резервуар 1 снабжен также указателем 8 уровня, который может измерять уровень L заполнения резервуара продуктом 4. Применим указатель 8 уровня любого типа, приемлемого для конкретного приложения. В рассматриваемом примере, более детально проиллюстрированном на фиг. 2, указателем 8 уровня является бесконтактный радарный указатель уровня (РУУ), т.е. датчик, снабженный направленной антенной 9, обеспечивающей свободное распространение генерируемого электромагнитного сигнала в резервуаре и прием электромагнитного эхо-сигнала от резервуара, и способный определять расстояние до поверхности 4а продукта на базе переданного и отраженного сигнала. РУУ 8 в данном варианте установлен в верхней части успокоительной трубки (успокоительного колодца) 10, т.е. вертикальной трубы, ориентированной вдоль внутренней стенки резервуара и проходящей через отверстие 11 (см. фиг. 2) в плавающей крыше 5.
Успокоительная трубка установлена в соответствии с обычной практикой и поэтому далее будет описана очень коротко, на одном примере. Данная трубка расположена на расстоянии от стенки 3 резервуара и поддерживается на своем нижнем конце поддерживающей конструкцией 12а, отходящей от этой стенки. Успокоительная трубка 10 заканчивается на расстоянии от дна 2 резервуара. Верхний конец трубки 10 проходит сквозь поддерживающий плоский кронштейн 12b, прикрепленный к стенке 3 резервуара и поддерживающий РУУ 8. Трубка 10 проведена через поплавок 6 крыши 5 резервуара, так что отверстие 11 является герметизированным каналом через поплавок. На верхней стороне поплавка 6, вплотную к отверстию 11, установлены ролики 18, благодаря которым крыша 5 резервуара может двигаться вверх и вниз вдоль трубки 10 без слишком большого трения. В отверстии 11 или вокруг него могут находиться дополнительные ролики, а также различные герметизирующие средства.
Как показано на фиг. 2, плавающая крыша 5 снабжена герметизирующим устройством 7, проходящим, без каких-либо разрывов, по ее периметру, примыкая изнутри к стенке 3 резервуара, и предназначенным ограничить проход жидкости и газа между плавающей крышей 5 и внутренней стороной 3а стенки 3 резервуара. Герметизирующее устройство содержит так называемую башмачную накладку 13, которая удерживается в контакте со стенкой 3 посредством пантографической подвески 14, закрепленной между поплавком 6 и накладкой 13. Давлением накладки 13 на стенку 3 резервуара можно управлять подбором груза 15 подвески 14. Между крышей 5 и накладкой 13 помещено основное уплотнение 16, как правило, из нефтестойкого каучука. Дополнительное уплотнение 17, обычно в форме резиновой полосы, расположено между крышей 5 и стенкой 3. Введение дополнительного уплотнения часто предусмотрено правилами защиты окружающей среды; однако, оно может приводить к повышенному трению между крышей 5 и резервуаром 1.
Как будет понятно специалисту, резервуар 1 с плавающей крышей и связанным с ней оборудованием может содержать также трубы, насадки на трубы, клапаны, механизмы для подачи и выведения продукта, различные измерительные и управляющие устройства и т.д.
Возвращаясь к фиг. 1, резервуар 1 снабжен мониторинговой системой 20 для мониторинга плавающей крыши 5. Эта система имеет находящуюся на крыше подсистему, содержащую один или несколько радарных указателей 21 уровня (в проиллюстрированном примере три), установленных в пространственно разделенных детекторных зонах плавающей крыши 5. Предпочтительная локализация детекторных зон для указателей 21 будет варьировать в зависимости от конкретной механической конструкции плавающей крыши 5 и резервуара 1. Однако желательно, чтобы указатели 21 находились вблизи отверстий 22, уже имеющихся в плавающей крыше 5. Такими отверстиями могут быть отверстия для ввода опорных стоек 23 крыши или другие отверстия, например различные наблюдательные отверстия, обычно при использовании резервуара с плавающей крышей закрытые крышками. Опорные стойки 23 крыши обычно используются для поддерживания плавающей крыши 5 в самом низком ее положении, когда резервуар 1 полностью освобожден от содержавшегося в нем продукта 4.
Как более подробно показано на фиг. 2, каждый указатель 21 уровня адаптирован для измерения референтного расстояния D по вертикали от поверхности 4а продукта до референтной точки плавающей крыши в соответствующей детекторной зоне 14. В представленном варианте изобретения указатели 21 уровня являются волноводными радарными указателями уровня, использующими одинарный или двойной проводящий зонд 24, чтобы направлять электромагнитные сигналы в резервуар и принимать эхо-сигналы от зон изменения импеданса, соответствующих границам сред. Как альтернатива, указатели 21 уровня могут быть бесконтактными радарными указателями уровня, содержащими направленную антенну, обеспечивающую свободное распространение электромагнитных сигналов в резервуаре и прием отражений этих сигналов. При этом важное условие состоит в том, чтобы технология, применяемая для контроля уровня, соответствовала низкому энергопотреблению с целью сделать возможным длительное функционирование до повторного запитывания энергией. Радарный указатель 21 уровня, предпочтительный для применения в рассматриваемой системе, обеспечивает точность в интервале примерно от ±5 см до ±1 мм. Такой интервал должен быть достаточным для точной идентификации любых отклонений от нормальных значений текущей высоты плавающей крыши 5 при низком энергопотреблении.
В представленном варианте каждый радарный указатель 21 уровня содержит безопасный блок 25 радиосвязи для передачи за пределы резервуара измеренного расстояния до поверхности продукта в конкретной детекторной зоне. Каждый радарный указатель 21 уровня предпочтительно имеет также внутренний источник питания (такой как батарея), возможно, подключенный к солнечной батарее. В одном варианте мониторинговой системы 20 к РУУ 21 не требуется протягивать никаких проводов, что делает систему очень гибкой и легко перестраиваемой.
Мониторинговая система 20 содержит также подсистему вне крыши, т.е. подсистему, не установленную на саму крышу. Эта подсистема содержит блок 26 радиосвязи, предназначенный для беспроводной коммуникации с радарными указателями 21 уровня и для передачи детектированных расстояний D системе 27 управления, которая в типичном варианте находится вне резервуара 1, как правило, в безопасной среде.
Согласно вариантам изобретения указатель 8 уровня также связан с системой 27 управления. Эта связь может быть беспроводной, подобно связи между РУУ 21 и данной системой, или проводной. Поскольку указатель 8 уровня находится в фиксированном положении в верхней зоне резервуара 1, обеспечение беспроводной связи может быть не столь важным. Во многих ситуациях между РУУ 8 и удаленной зоной, в которой находится система 27 управления, уже может существовать проводная связь, например в виде двухпроводной петли управления.
На фиг. 3 представлена упрощенная блок-схема системы 27 управления, в которую входят устройство ввода/вывода (I/O), т.е. входной интерфейс 31, процессорные средства, например процессор (в частности, микропроцессор, μ) 32, память (например, оперативная память, RAM) 33 и пользовательский интерфейс 34. В памяти хранится программный код 35, который должен выполняться процессором 32, чтобы осуществить способ согласно варианту изобретения. Следует отметить, что некоторые функции альтернативно могут быть реализованы аппаратно или как аппаратно/программные комбинации.
Функционирование системы 27 управления далее будет описано со ссылкой на фиг. 4, где представлена блок-схема, иллюстрирующая различные операции (шаги) способа по изобретению.
На шаге S1 вход 31 принимает данные измерений, включая уровень L заполнения (от РУУ 8) и референтное расстояние Dn (от каждого из РУУ 21). Принимаемые данные измерений получают, по существу, одновременно, в течение короткого временного интервала, желательно короче 0,1 с, как правило, короче 0,01 с.
На шаге S2 каждое референтное расстояние Dn сравнивается с ожидаемым значением Dn,exp (которое извлекается из памяти 33), чтобы определить отклонение референтного расстояния. На шаге S3 определяют, находится ли это отклонение за пределами допустимого интервала отклонений.
Если этот интервал симметричен относительно 0, т.е. допускаются одинаковые отклонения в сторону уменьшения или увеличения расстояния относительно ожидаемого значения, шаг S3 может выполняться путем сравнения абсолютного значения отклонения с пороговым значением, т.е. проверки выполнения соотношения |Dn-Dn,exp|>Th, где Dn - отклонение референтного расстояния, Dn,exp - ожидаемое значение, a Th - заданное пороговое значение.
Если допустимый интервал является асимметричным, например если допускаются большие отклонения в сторону уменьшения расстояния, чем в сторону его превышения, отклонение должно сравниваться с обоими граничными значениями допустимого интервала, т.е. нужно провести проверку выполнения соотношения Thbelow
Возможно также, что допустимый интервал изменяется в зависимости от того, является ли резервуар заполненным или пустым. Когда резервуар опустошается, вероятность того, что референтное расстояние превысит ожидаемое значение, повышается (например, если крыша резервуара в процессе его опустошения застрянет на короткое время). Однако маловероятно, что в этом случае референтное расстояние упадет ниже ожидаемого значения (возможно, за исключением случаев, когда на очень короткое время крыша резервуара соскользнет до опускания на поверхность резервуара). И наоборот, когда резервуар наполняется, референтное расстояние скорее окажется ниже ожидаемого значения (например, если крыша резервуара в процессе его наполнения застрянет на короткое время). Однако маловероятно, что в этом случае референтное расстояние превысит ожидаемое значение.
Если будет определено, что референтное отклонение для любого из РУУ 21 находится вне допустимого интервала, это отклонение записывается в память 33, вместе со значением уровня L заполнения, зарегистрированным одновременно с детектированием данного отклонения (шаг S4). Желательно также записать в память значения отклонений, полученных от других РУУ 21. Эти сохраненные данные далее будут именоваться набором данных по отклонениям, ассоциированным с конкретным уровнем заполнения.
Наборы данных по отклонениям хранятся в процессе функционирования резервуара. В варианте по фиг. 4 шаги S1-S4 повторяют в течение операционного цикла, такого как заполнение и/или слив продукта из резервуара. Это соответствует шагу S5. Программа (программный код) 35, выполняемая (выполняемый) процессором 32, рассчитана на использование хранящихся в памяти наборов данных для осуществления различных диагностических функций (шаг S5), чтобы обеспечить идентификацию множества различных нежелательных условий, некоторые из которых будут рассмотрены далее.
Граница крыша-резервуар
Отклонения, имеющие место в течение нескольких последовательных циклов опустошения/заполнения резервуара, могут указывать на наличие проблемы в граничной зоне между крышей 5 и стенкой 3 резервуара, например в герметизирующем устройстве 7.
Если такие повторяющиеся отклонения происходят при нерегулярных уровнях продукта, это может указывать на слишком плотное уплотнение, создаваемое герметизирующим устройством 7 между крышей и стенкой резервуара. Возможное действие в этом случае может состоять в регулировке груза 15 в составе пантографической подвески 14, чтобы, тем самым, отрегулировать давление накладки 13 на стенку 3 резервуара. Проблема может быть также вызвана повторяющимся, но временным налипанием загустевшего продукта на внутреннюю поверхность стенки резервуара.
Если же такие повторяющиеся отклонения имеют место при одном и том же уровне продукта, это указывает на механическую асимметрию (например, на деформированность резервуара) или постоянное налипание продукта на этом уровне.
Получение данных о том, в какой именно части крыши имеет место отклонение, возможно благодаря тому, что система содержит несколько указателей 21 уровня (например три). Эти данные обеспечивают дополнительную информацию о проблеме.
Опорные стойки в контакте с дном
Если отклонения наблюдаются вблизи дна 2 резервуара, это указывает, что опорные стойки 23 крыши могут находиться в контакте с дном. Не рекомендуется снимать отсчеты уровня в этих условиях, поскольку коррекция измеренного уровня крыши резервуара, когда опорные стойки находятся в контакте с дном, становится ненадежной. Как следствие, рассчитанный объем становится неопределенным.
В ситуации, когда крыша 5 полностью лежит на опорных стойках 23, воздух начинает заполнять пространство под крышей 5, что, как правило, нежелательно (или недопустимо). Применительно к углеводородным продуктам (например, к нефти) воздух под крышей 5 будет насыщен газообразными углеводородами. При повторном заполнении резервуара продуктом этот воздух будет вытесняться в пространство над крышей, создавая, тем самым, нежелательную (потенциально опасную) ситуацию загрязнения среды.
Данная ситуация может быть детектирована системой согласно варианту изобретения путем задания для референтного расстояния порога образования воздушного кармана. Если данный порог превышен, это будет указывать на то, что между крышей 5 и поверхностью 4а продукта сформировался воздушный карман. В такой ситуации система может подать тревожный сигнал.
Следует отметить, что обычное измерение уровня заполнения может быть также использовано, чтобы детектировать момент, когда опорные стойки 23 приходят в контакт с дном. Однако возможность выдачи тревожного сигнала в этом случае зависит от правильного ввода значения длины опорных стоек. Обычно это значение берется из чертежей резервуара (если они доступны) и часто может быть неточным. Функция выдачи тревожного сигнала может не выполняться также, если указатель уровня прекращает свою работу или если он неадекватно прокалиброван. Вместо использования указателей 21 уровня для детектирования положения крыши 5, как это предусмотрено рассмотренным вариантом изобретения, можно осуществлять избыточное (дублирующее) детектирование контакта опорной стойки с дном.
Дождевая вода
Дождевая вода, если она не отводится с крыши, в типичной ситуации может привести к увеличенной осадке крыши. По этой причине открытая плавающая крыша обычно снабжается системой отведения воды, содержащей сборник 28 для дождевой воды, установленный в центре крыши 5. От сборника 28 отходит гибкая труба 29, отводящая воду от резервуара.
Если обработка данных на шаге S6 указывает, что крыша 5 погружена в продукт слишком глубоко, это может свидетельствовать о том, что система отведения воды не функционирует должным образом. Чтобы отличить этот случай от других случаев "слишком глубокого" погружения, может потребоваться дополнительный датчик (не изображен) для измерения уровня воды в сборнике 28, подсоединенный к упомянутому блоку 26 радиосвязи. Если отклонения, указывающие на избыточное погружение плавающей крыши, имеют место в то же время, когда данные от датчика, связанного со сборником, указывают, что данный сборник заполнен, это свидетельствует о наличии проблемы с системой отведения дождевой воды. Основные данные об этой ситуации обеспечит мониторинговая система 20 для крыши резервуара.
Специалисту будет понятно, что изобретение отнюдь не ограничивается описанными предпочтительными вариантами. Напротив, объем прилагаемой формулы допускает многочисленные модификации и вариации. Например, применимы указатели 8, 21 уровня различных типов; могут быть также изменены количество и расположение указателей 21. Далее, компоненты системы 27 управления, обеспечивающей операции способа согласно изобретению, могут быть реализованы в различных вариантах.
Реферат
Предложенная группа изобретений относится к средствам для идентификации условий функционирования плавающей крыши резервуара. Способ идентификации нежелательного условия для функционирования плавающей крыши резервуара включает в себя определение уровня заполнения резервуара продуктом; детектирование референтного (опорного) расстояния между референтной позицией на крыше и указанной поверхностью с использованием установленного на крыше указателя уровня; определение отклонения референтного расстояния как разности между указанным референтным расстоянием и ожидаемым значением и сопоставление отклонения референтного расстояния с заданным интервалом. Если отклонение референтного расстояния находится вне заданного интервала, производится сохранение в памяти набора данных, включающего указанное отклонение референтного расстояния и указанный уровень заполнения. Эти шаги повторяют для множества моментов времени, после чего идентифицируют нежелательное условие по сохраненным в памяти наборам данных об отклонениях референтных расстояний и уровнях заполнения. Указанный способ реализуют соответствующие система управления для идентификации нежелательного условия и мониторинговая система, снабженные соответствующим интерфейсом. Данная группа изобретений обеспечивает возможность проведения диагностики плавающей крыши резервуара с целью выявления аварийных ситуаций. 3 н. и 11 з.п. ф-лы, 4 ил.
Комментарии