Вакуумный захват этикеток для роботизированного нанесения на объекты цилиндрической формы - RU203694U1
Код документа: RU203694U1
Чертежи


Описание
Полезная модель относится к захватным устройствам роботов-манипуляторов с вакуумным удержанием, а именно к устройствам, позволяющим проводить этикетирование поверхностей путём накатывания этикеток.
Полезная модель относится к области робототехники, в частности, к промышленным роботам-манипуляторам, применяемым в автоматизированных упаковочных линиях, предназначенных для нанесения самоклеящихся этикеток. Роботы-манипуляторы обеспечивают возможность захватывания и удерживания листового материала (этикетки), а также возможность перемещения удерживаемого объекта из исходной точки в заданную целевую точку.
Полезная модель может быть использована при разработке конструкции рабочего органа (инструмента) робототехнической системы, а именно, вакуумного захватного устройства робота-манипулятора.
Захватным устройством промышленного робота(робота-манипулятора) называется рабочий орган для захватывания и удерживания в определенном положении предмета производства [ГОСТ 26063-84 «Роботы промышленные. Устройства захватные. Типы, номенклатура основных параметров, присоединительные размеры», Приложение «Пояснение некоторых терминов»].
Предмет, который захватывается и удерживается захватным устройством, называют объектом манипулирования.
Захватные устройства по принципу действия подразделяют на механические захватные устройства, вакуумные захватные устройства, магнитные захватные устройства, прочие [ГОСТ 26063-84 «Роботы промышленные. Устройства захватные. Типы, номенклатура основных параметров, присоединительные размеры», п. 2].
Известно вакуумное захватное устройство робота [RU 116399, МПК В25J 15/06 (2006.01), опубл. 27.05.2012], содержащее систему вакуумного захвата и источник вакуума, система вакуумного захвата содержит сильфон с силиконовой гибкой уплотняющей кромкой, обеспечивающей возможность оптимальной герметичности на неровных поверхностях, тесно связанный с подпружиненным плунжером посредством ниппеля, причем подпружиненный плунжер кинематически соединён с фланцем кисти робота.
К достоинствам прототипа следует отнести возможность оптимальной герметичности на неровных поверхностях, к недостаткам невозможность нанесения этикеток на неплоские поверхности, в связи с конструктивными особенностями устройства.
Общими существенными признаками прототипа с заявленным устройством является наличие системы вакуумного захвата и источника вакуума.
Техническая проблема, на решение которой направлена заявляемая полезная модель, заключается в создании вакуумного захвата для этикетирования различных поверхностей, путём накатывания этикеток.
Технический результат заключается в разработке вакуумного захвата для автоматизации процессов накатывания самоклеящихся этикеток с помощью робота-манипулятора. Это достигается выполнением рабочей части в виде цилиндра.
Вакуумное захватное устройство робота состоит из установочного фланца с трубой, на конце которой закрепляется головка захвата с размещённой на её поверхности силиконовым чехлом, в отверстия головки вкручены вакуумные присоски. На торце головки захвата со стороны трубы вкручиваются быстрозажимные фитинги, которые, в свою очередь, соединяются с пневмомагистралью, соединённой с источником вакуума.
Сущность полезной модели поясняется рисунками.
На фиг. 1 представлена пневматическая схема источника вакуума.
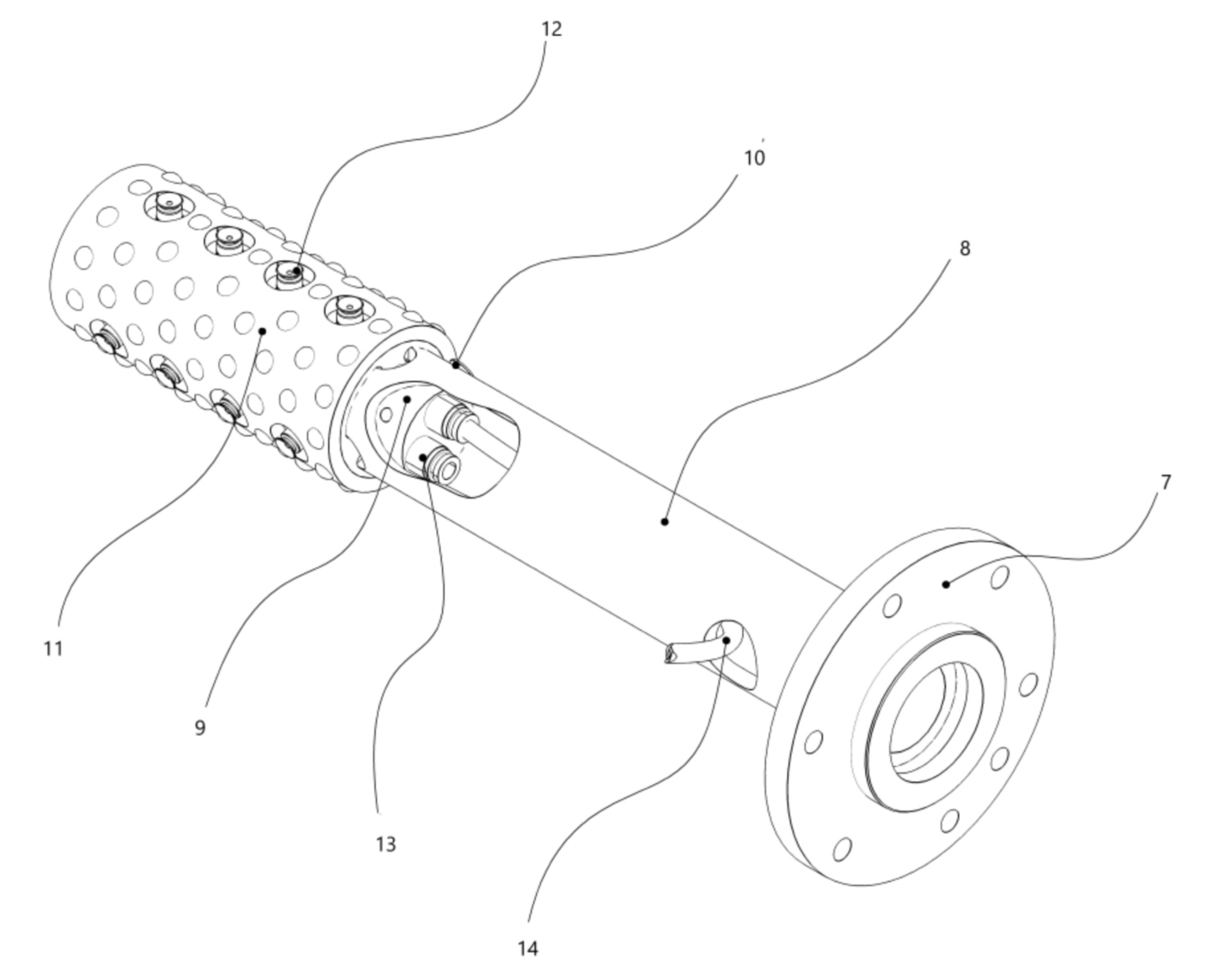
На фиг. 2 изображен вакуумный захват
Источник вакуума захватного устройства робота содержит компрессор 1 (фиг. 1), пневмораспределитель 2, эжектор 3, реле вакуума 4, дроссель с обратным клапаном 5, и соединен с вакуумным захватом 6.
Вакуумный захват 6 в свою очередь состоит из установочного фланца7 (фиг. 2),который имеет базирующий поясок для кинематического соединения с роботом-манипулятором. С отверстием во фланце посредством сварки соединена цилиндрическая труба 8, которая на противоположном конце от фланца имеет U-образные канавки. Конец трубы 8 соединяется с присоединительной шейкой головки захвата 9 и пазам под U-образные канавки, фиксируется винтами 10. На головке захвата 9 расположены 8 глухих отверстий с плоским дном, расположенные в два ряда по четыре отверстия со смещением по диаметру на 110°. В центре глухих отверстий расположены отверстия с резьбой меньшего диаметра. С цилиндрической частью захвата соединен посредством клеевого соединения силиконовый чехол 11, на поверхности которого расположены выступы в виде полусфер, задача которых заключается в обеспечении равномерного усилия прижима этикетки к объекту. В отверстия с резьбой вкручиваются вакуумные присоски 12, в качестве которых могут быть использованы стандартные вакуумные присоски SMALZPFYN-8-SI-55-M5-AG. Канал сжатого воздуха соединён с каналами, проходящими через всё тело головки захвата до торца присоединительной шейки. В торец шейки в каналы вкручиваются фитинги 13 с быстросъёмным зажимами, в качестве которых могут быть использованы SMCKQ2H06-01S. К фитингам подключается пневмомагистраль 14, которая проходит в отверстие внутри трубы.
Функционирование данного устройства осуществляется при работе робота-манипулятора, входящего в состав роботизированной системы для автоматического нанесения самоклеящейся этикетки автоматической линии маркировки. Роботизированная система содержит блок управления (на рисунках не указан), задающий режимы функционирования и обеспечивающий взаимодействие робота-манипулятора, системы вакуума и вакуумного захвата 6.
Операция захвата и наклеивания этикетки происходит следующим образом. Робот-манипулятор ориентирует вакуумный захват 6 (фиг. 1) относительно объекта манипулирования таким образом, чтобы ряд присосок 12(фиг. 2) захватывал нижний край этикетки. В момент контакта управляющий сигнал подается на пневмораспределитель 2 (фиг. 1) и на момент захвата и удержания в системе захвата создаётся вакуум, и происходит захват края. Затем манипулятор методом накатки перемещается в сторону противоположного края этикетки до касания со вторым рядом присосок 12 (фиг. 2). После создания вакуума на всех присосках происходит отрыв этикетки от поверхности подложки и перемещение её к целевому объекту.
Для сброса этикетки робот-манипулятор касается краем поверхности этикетки и прижимает поверхностью силиконовой оболочки 11 (фиг. 2). Затем подаётся сигнал в пвнемораспределить 2 (фиг. 1), в системе снимается вакуум, происходит сброс этикетки, затем происходит накатывание этикетки на поверхность целевого объекта до второго ряда присосок 12 (фиг. 2).
Таким образом, заявляемый вакуумный захват робота позволяет автоматизировать процесс этикетирования.

Фиг. 1
Фиг. 2
Реферат
Полезная модель относится к захватным устройствам роботов-манипуляторов с вакуумным удержанием, а именно к устройствам, позволяющим проводить этикетирование поверхностей путём накатывания этикеток.Вакуумное захватное устройство робота содержит установочный фланец с трубой, на конце которой закрепляется головка захвата с размещённым на её поверхности силиконовым чехлом, в отверстия головки на рабочей поверхности вкручиваются вакуумные присоски. На торце головки захвата со стороны трубы вкручиваются быстрозажимные фитинги, которые, в свою очередь, подключаются к пневмомагистрали, соединённой с источником вакуума.Технический результат заключается в разработке вакуумного захвата в виде цилиндра для автоматизации процессов нанесения самоклеящихся этикеток с помощью робота-манипулятора. 2 ил.
Комментарии