Управляемое компьютером этикетировочное устройство (варианты) и способ наклейки этикеток (варианты) - RU2134651C1
Код документа: RU2134651C1
Чертежи






Описание
В этикетировочной машине револьверного типа, такой, как описанная в патенте США 4108709 и включенная в настоящее описание в качестве прототипа, контейнеры непрерывно подаются на вращающуюся револьверную головку; каждый контейнер в свою очередь зажимается между верхней и нижней планшайбами, которые перемещаются револьверной головкой; зажатый таким образом контейнер поворачивается по кругу вокруг центрального вала револьверной головки к позиции выдачи этикетки, где он касается передней кромки этикетки, перемещаемой механизмом транспортировки этикеток, таким как вращающийся вакуумный барабан; этикетка отделяется от вакуумного барабана и обертывается вокруг контейнера, поскольку контейнер приводится во вращение (проворачивается) вокруг своей оси; и обернутый этикеткой он перемещается револьверной головкой к позиции разгрузки контейнеров, где снабженный этикеткой контейнер удаляется из револьверной головки. В таком цикле необходимо вращать по кругу каждый контейнер, зажатый между парой планшайб, вокруг оси револьверной головки, а также необходимо поворачивать контейнер вокруг его собственной оси для обертывания его этикеткой.
В вышеупомянутом патенте США 4108709 поворот контейнера вокруг своей оси достигается, например, посредством колеса, прикрепленного к верхней из пары планшайб соосно ей, а также посредством втулки, которая концентрична оси револьверной головки. При контакте этого колеса со втулкой соответствующая планшайба, а вместе с ней и контейнер поворачиваются.
Такое приспособление для проворота контейнеров хотя и является в целом эффективным, однако оно имеет ряд ограничений. Например, контейнер может поворачиваться только в одном направлении, и его скорость задается скоростью револьверной головки и радиусами колеса и втулки. Кроме того, этот способ поворота контейнера для обертывания его этикеткой может быть неэффективен для контейнеров, имеющих, как правило, некруглое сечение.
Целью настоящего изобретения является создание более универсальных средств функционирования такой этикетировочной машины револьверного типа.
Отмеченные выше трудности и ограничения в значительной степени устраняются с помощью управляемого компьютером этикетировочного устройства револьверного типа для управления механизмом наклейки этикеток при наклеивания этикеток на контейнеры. Управляемое компьютером этикетировочное устройство револьверного типа имеет на позиции манипулирования контейнерами вращаемую двигателем револьверную головку и один или более датчиков, которые выдают информацию о состоянии функционирования револьверной головки. На каждой позиции манипулирования контейнерами имеется двигатель для приведения в движение устройства манипулирования контейнерами и один или более датчиков, которые выдают информацию о состоянии функционирования устройства манипулирования контейнерами. Механизм наклейки этикеток, такой как вращаемый двигателем вакуумный барабан, также может быть снабжен датчиками для предоставления информации о состоянии функционирования. С двигателями и датчиками соединен компьютер для обработки принятой информации о состоянии и для генерирования управляющих сигналов в ответ на принимаемые сигналы для возбуждения двигателей и для осуществления правильного этикетирования контейнеров. Датчики обычно выдают информацию о скорости, направлении и положении. Компьютер программируется для обработки информации о состоянии совместно с заранее запомненной информацией, включая информацию, относящуюся к характеристикам этикетировочного устройства, размеру и форме контейнера и требуемым характеристикам этикетирования контейнеров.
Краткое описание чертежей.
На фиг. 1 показан вид в перспективе предпочтительного варианта выполнения револьверной установки с изображением только набора нижних планшайб.
На фиг. 2 схематически представлен один из режимов работы такой револьверной головки.
На фиг. 3 схематически представлен другой режим работы, в котором осуществляется этикетирование с фронтальной и тыльной сторон.
На фиг. 4 схематически представлена операция этикетирования, осуществляемая посредством револьверной головки предпочтительного варианта выполнения для наклеивания этикеток с фронтальной и тыльной сторон на контейнеры, имеющие нецилиндрическую форму.
На фиг. 5 схематически представлены некоторые элементы, такие как двигатели/исполнительные органы, датчики, линии передачи сигналов управления (линии управления) и интерфейсы управляемого компьютером револьверного узла.
На фиг. 6 представлена упрощенная структурная схема аппаратных средств, включая интерфейсы, исполнительные органы/двигатели и датчики, согласно предпочтительному варианту выполнения.
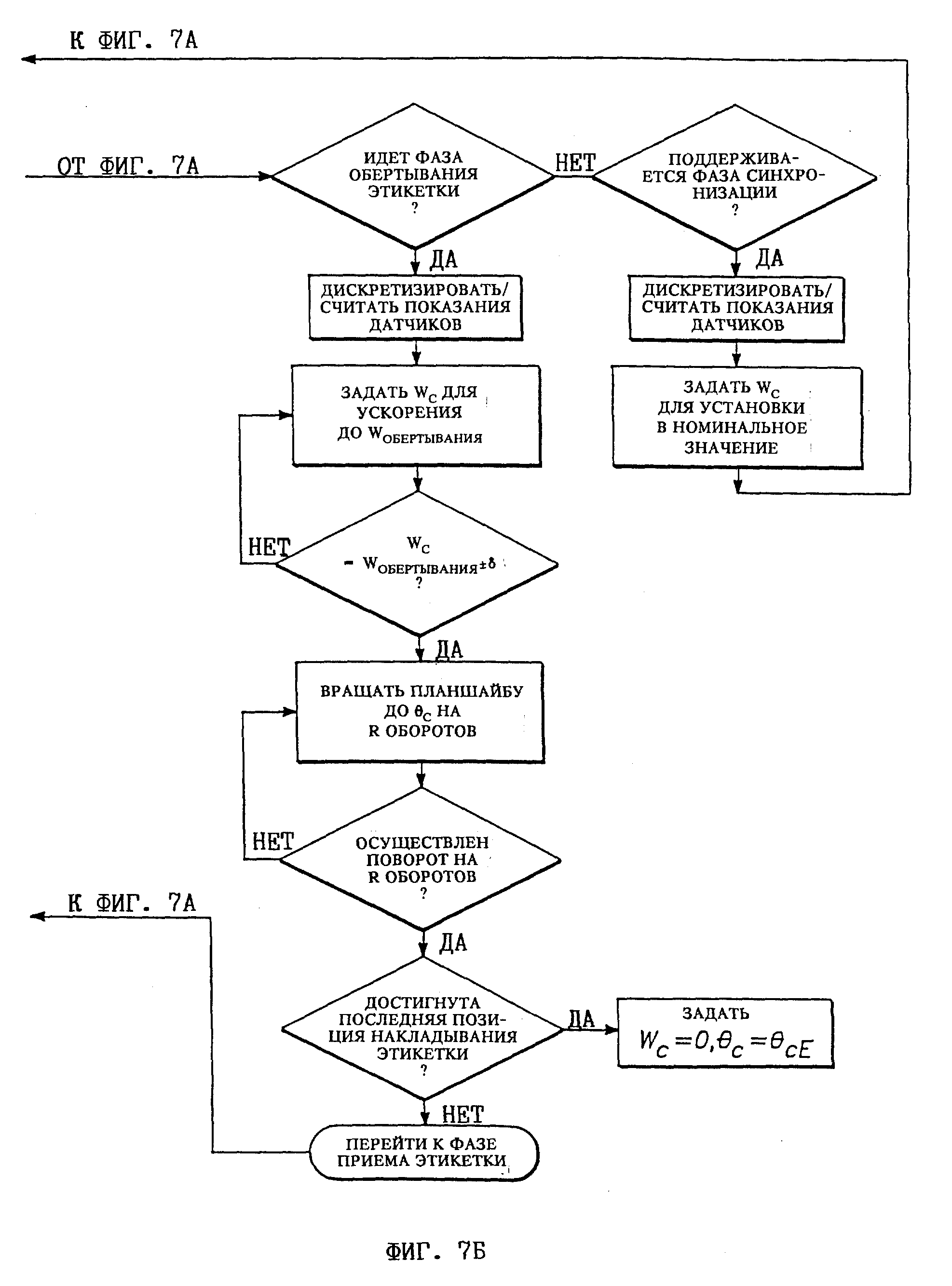
На фиг. 7 (А, Б) представлена блок-схема алгоритма для управления работой этикетировочного устройства.
Нижеследующее подробное описание представлено для удовлетворения требований патентования. Однако для специалиста очевидно, что могут выполняться различные изменения и модификации без отхода от объема изобретения. Нижеследующее описание приведено в качестве примера выполнения изобретения и не ограничивает его.
На фиг. 1 показана нижняя часть этикетировочной револьверной головки 10. Этикетировочная револьверная головка 10 приводится в движение валом 11, который установлен в раме/корпусе 12 машины и к которому прикреплена плита 13. Хотя на чертеже представлена револьверная головка 10, в соответствии с настоящим изобретением можно использовать различные средства для перемещения контейнеров. Например, можно использовать транспортер с линейным перемещением контейнеров или транспортер, задающий разнообразные заранее определенные траектории. В устройстве предусмотрено множество нижних планшайб 14, которые распределены с определенным угловым шагом вокруг вала 11 и каждая из которых перемещает установленный на ней контейнер или другой предмет, показанный позицией 15, между позицией загрузки контейнеров, где каждый контейнер последовательно устанавливается на одну из множества планшайб 14, и позицией разгрузки контейнеров, где этот контейнер удаляется с планшайбы. Каждая планшайба прикреплена к валу 16, который приводится во вращение соответствующим двигателем 17. На каждый двигатель 17 с помощью муфты 19 устанавливается датчик 18. Датчик 18, а также другие указанные в описании датчики могут быть, например, шифраторами, различные типы которых хорошо известны в технике, или датчиками других типов. Вал 16 может выполнять функцию и соединительного элемента 19. Функция датчика 18 планшайбы описана ниже.
Для каждой нижней планшайбы 14 предусмотрена верхняя планшайба (не показано), ось которой совпадает с осью соответствующей нижней планшайбы. В устройстве предусмотрен соответствующий подающий механизм и механизм выгрузки для подачи контейнера на револьверную головку и для их удаления из револьверной головки после того, как на них наклеена этикетка; а также соответствующий транспортер этикеток для их подачи к каждому контейнеру на позицию выдачи/наклейки (накладывания этикеток). Такое устройство описано, например, в патенте США 4108709. На представленном чертеже показан самый простой вариант выполнения вакуумного барабана 214 в качестве держателя этикеток 36. Вакуумный барабан 214 соединен валом 213 с двигателем 210 барабана и с датчиком 211 барабана. Позиция накладывания этикеток содержит вакуумный барабан, соответствующее клеемазальное устройство 201 и устройство резки этикеток. Вакуум создается соответствующим вакуумным насосом (не показан). Кроме того, предусмотрен механизм, отодвигающий верхнюю из каждой пары верхней и нижней планшайб от нижней планшайбы для обеспечения возможности установки между ними контейнера и опускающий эту планшайбу для зажима контейнера в промежутке между верхней и нижней планшайбами. В патенте США 4108709 описан пригодный для выполнения такой функции кулачковый механизм, который служит также для подъема каждой верхней планшайбы для удаления этикетированного контейнера. Кроме того, могут быть также предусмотрены датчик и исполнительный механизм, предназначенные соответственно для определения положения верхней планшайбы и ее перемещения. Эти датчик и исполнительный механизм могут быть аналогичны тем, которые описаны ниже для револьверной головки 10 и модифицированы соответствующим образом. Исполнительный механизм в общем случае может быть электродвигателем или пневмоцилиндром различных типов.
Вал 11 револьверной головки приводится во вращение электродвигателем 25 через вал 26 двигателя, зубчатое колесо 27 двигателя и зубчатое колесо 28 револьверной головки. С валом 11 револьверной головки с противоположной от двигателя 25 стороны соединен также датчик 31 револьверной головки. Зубчатое колесо 29 датчика, крепящееся к датчику 31 через вал 30 датчика, находится в зацеплении с зубчатым колесом 28 револьверной головки.
Двигатель 25 вращает револьверную головку вокруг оси вала 11. Каждый двигатель 17 планшайбы вращает соответствующую планшайбу 14. При этикетировании необходимо управлять круговой скоростью револьверной головки 13, а тем самым и круговой скоростью планшайб 14 вокруг оси главного вала 11. Кроме того, необходимо управлять скоростью и направлением вращения каждой планшайбы 14 вокруг ее собственной оси. Например, если предположить, что револьверная головка 13 вращается против часовой стрелки, может быть необходимо вращать револьверную головку 13 с более высокой или низкой скоростью, поворачивать планшайбу 14 быстрее или медленнее, поворачивать планшайбу 14 по или против часовой стрелки и начинать и полностью останавливать поворотное движение планшайбы 14. В общем случае необходимо начинать поворот каждой планшайбы 14 до того, как находящийся на ней контейнер коснется передней кромки этикетки, чтобы согласовать линейную скорость этикетки и скорость поверхности контейнера в точке касания, а в некоторых вариантах применения, чтобы гарантировать точное размещение этикетки относительно некоторой метки или признака этого контейнера.
На фиг. 2 показаны четыре пронумерованных контейнера, которые обозначены позициями 1, 2, 3 и 4 и которые перемещаются револьверной головкой 10. Под позицией 35 показан вакуумный барабан с этикеткой 36, удерживаемой на его цилиндрической поверхности вакуумом, причем передняя кромка 37 этой этикетки касается контейнера 2 в точке касания. На часть этикетки 36 с помощью клеемазального устройства 201 нанесен клей. При этом желательно минимизировать проскальзывание между поверхностью 15 контейнера и подающего этикетки вакуумного барабана 35 во время касания. Когда контейнер 1 достигает позиции этикетирования, его двигателю 17 выдается команда, предписывающая ему при достижении того же положения, что и контейнер 2, поворачиваться посредством его двигателя 17 с такой скоростью, чтобы его круговая скорость вокруг оси главного вала 11 (обозначенная стрелкой I) и скорость его поворота (обозначенная стрелкой III) вызывали его перемещение вперед с той же самой или чуть большей скоростью и в том же направлении, что и этикетка; иначе говоря, на линии касания скорости контейнера и передней кромки этикетки равны или слегка отличаются для поддержания должного натяжения. Посредством этого проскальзывание между передней кромкой этикетки и контейнером предотвращается или контролируется с высокой точностью.
Как показано на фиг. 2, контейнер 3 уже отошел от зоны контакта с вакуумным барабаном, и свободная или известная как "развевающаяся" или задняя кромка этикетки 203 оборачивается вокруг контейнера. При этом желательно, чтобы развевающийся край был как можно короче, чтобы не создавать помех при этикетировании следующего контейнера 2. Кроме того, может быть необходимо располагать планшайбы 14, а следовательно, и контейнеры 15 как можно ближе друг к другу. Для достижения этих целей двигателем 17 соответствующей планшайбы 14 можно управлять таким образом, чтобы осуществить более быстрое поворачивание контейнера 3 по сравнению с контейнером 2 по меньшей мере до тех пор, пока полностью не завершится обертывание этикеткой, как показано для контейнера в позиции 4. Такое управление можно осуществлять в течение определенного промежутка времени или для определения числа поворотов контейнера. Когда этикетка наклеена полностью, двигателю 17 может быть дана команда на замедление или остановку вращения контейнера. Управляющий алгоритм и взаимодействие с двигателями и датчиками описаны дальше. Промежуточный цилиндр, либо в альтернативном варианте прямой приглаживающий рычаг, либо иное придавливающее устройство 202 может быть также приведено в соприкосновение с поворачивающимся контейнером 3 для подпружиненного прижатия этикетки 36 с целью осуществления клеевого контакта с контейнером 3. Промежуточный цилиндр 202 может устанавливаться для каждой планшайбы 14, как показано на чертеже, или в качестве одиночной позиции, соответствующей каждому вакуумному барабану 35. Необходимость в таком дополнительном прикладывающем давление устройстве будет зависеть от таких факторов, как тип клея, диаметр контейнера и материал этикетки. Могут также использоваться и другие способы прижатия этикетки с клеем к поверхности контейнера, например на контейнер можно соответствующим образом направлять поток воздуха, чтобы придавливать этикетку к поверхности контейнера.
Хотя в общем случае желательно согласовывать линейную скорость контейнера и этикетки в точке касания, в ином случае может быть необходимо поворачивать контейнер 2 с такой скоростью, чтобы тангенциальная скорость контейнера превышала тангенциальную скорость этикетки на барабане, тем самым вызывая стягивание этикетки с барабана.
На фиг. 3 показана операция этикетирования фронтальной и тыльной сторон контейнера, при этом контейнер 2 имеет фронтальную этикетку 36F, наложенную на него вакуумным барабаном 35F, а контейнер 5 имеет тыльную этикетку 36b, наложенную на него вакуумным барабаном 35B. Устройство по фиг. 3 по существу аналогично устройству по фиг. 2, за исключением того, что в дополнение к первой позиции этикетирования предусмотрена вторая позиция этикетирования. Управляющие система и алгоритм несколько сложнее для устройства с несколькими позициями этикетирования и более подробно описаны ниже. Если предположить, что тыльная этикета 36b должна накладываться в положении, отличающемся на 180o от положения фронтальной этикетки 36F, необходимо изменить ориентацию контейнера на 180o относительно точки касания соответствующих вакуумных барабанов 35F и 35B. Контейнер 4 представляет собой контейнер, находящийся в положении между двумя позициями этикетирования после наклейки на него первой этикетки. Этот поворот или изменение ориентации может достигаться поворотом на любой кратный 180o угол, например, можно осуществить поворот контейнера на 3 • 180 = 540o между двумя позициями этикетирования. Эта операция может быть применена и к этикеткам, которые разнесены на иной угол, отличный от 180o , для накладывания трех или более этикеток, и к наклейке этикеток на стороны нецилиндрического контейнера. Во всех этих случаях контейнер приводится во вращение между двумя позициями этикетирования на требуемую величину или на ее соответствующее кратное.
В дополнение к изменению ориентации контейнер в позиции 5 должен также иметь такую скорость, чтобы, как и для устройства с единственной позицией этикетирования, минимизировать проскальзывание при накладывании этикетки 36b. Это требование, как и ранее, легко выполнимо. Однако возникает дополнительная сложность, когда на контейнер помещается несколько этикеток. Если важны взаимная ориентация или положение двух этикеток, то ориентация контейнера относительно вакуумного барабана 35B и скорость контейнера должны иметь требуемые значения. Такое согласование достигается даже несмотря на промежуточное ускорение контейнера для облегчения обертывания этикеткой, а замедление необходимо для согласования с тангенциальной скоростью на вакуумном барабане 35B. Управляющий механизм для выполнения этой операции описан ниже.
Другим предметом изобретения является этикетирование контейнеров, имеющих нецилиндрическую форму, например контейнеров с прямоугольным или овальным сечением. Как и для цилиндрических контейнеров, может быть обеспечено нанесение как одной, так и нескольких этикеток. Скорость вращения планшайб может изменяться в процессе этикетирования таким образом, чтобы каждая точка поверхности контейнера при соприкосновении с накладываемой этикеткой имела соответствующую скорость для согласования со скоростью подаваемой этикетки или несколько отличную скорость для поддержания должного натяжения.
На фиг. 4 показан процесс наклейки нескольких этикеток на прямоугольные контейнеры. Процесс этикетирования прямоугольных контейнеров аналогичен процессу, представленному на фиг. 3 для цилиндрических контейнеров, однако в данном случае может потребоваться большее количество перемещений контейнера между позициями. На фиг. 4 показана операция этикетирования с фронтальной, тыльной и боковой сторон, сбоку, при этом контейнер 1 имеет фронтальную этикетку 41F, накладываемую на него вакуумным барабаном 40F, контейнер 3 имеет тыльную этикетку 41B, накладываемую на него вакуумным барабаном 40B, а контейнер 5 имеет боковую этикетку 41S, накладываемую на него вакуумным барабаном 40S. Если предположить, что эти этикетки должны быть наклеены на три различные стороны прямоугольного контейнера, то необходимо поворачивать контейнер между вакуумными барабанами 40F, 40B и 40S. Контейнеры 2 и 4 представляют собой контейнеры в промежуточных точках между операциями этикетирования. Каждый процесс накладывания этикетки завершается между позициями этикетирования, и контейнер ориентируется заново для следующей операции. Как и в случае этикетирования цилиндрических контейнеров, может потребоваться некоторое давление или усилие для прижатия каждой этикетки с клеем к поверхности контейнера. Это усилие прижатия может, как и в вышеприведенных вариантах, осуществляться с помощью какого-либо прижимающего устройства, такого как подпружиненный цилиндрический валик 240F, 240B, 240S, или, например, каким-либо направленным потоком сжатого воздуха. Прямоугольный контейнер может также поворачиваться между позициями на большей скорости, но сам по себе такой поворот может быть недостаточен для наклейки этикетки к прямоугольному контейнеру при некоторых условиях вследствие разрушения воздушного потока, обусловленного неправильной формой контейнера. Если форма контейнера существенно отличается от цилиндрической, может быть необходимо управлять ориентацией каждого контейнера в каждом положении по мере вращения его револьверной головки или, в более общем случае, по мере его прохождения по заранее заданной траектории перемещения. Обеспечение ориентации контейнера может достигаться путем направления контейнера цилиндрическим валиком 240B, как показано на фиг.4. Для достижения вышеуказанного и иных управлений движениями предлагается описывается далее автоматизированная система, управляемая компьютером 20.
На фиг. 1 показан вид в перспективе предпочтительного варианта выполнения управляемого компьютером этикетировочного устройства 10 револьверного типа. Для большей наглядности при описании работы устройства по настоящему изобретению узел 10 револьверной головки показан изолированным от остальной части системы. Операции выгрузки и загрузки контейнеров 15 из механизма револьверного типа и в него известны из уровня техники. Один из таких способов описан в патенте США 4108709, выданном на имя Hoffmann. В предпочтительном варианте выполнения револьверная установка 10 соединена посредством множества линий управления с компьютером 20 через множество интерфейсов. Линии управления образуют достаточное количество каналов связи для считывания положения каждого датчика 18 и 31 и для возбуждения каждого двигателя 17 и 25 либо непосредственно, либо через выходные возбудители для выполнения требуемых операций. Например, можно использовать два или несколько токопроводящих кабеля от каждого двигателя и датчика к контроллеру компьютера либо можно использовать узел мультиплексирования или электрическую шину с меньшим числом проводов. Для некоторых двигателей и датчиков могут потребоваться дополнительные провода или можно использовать общий заземляющий провод для снижения числа необходимых для связи проводов. Эти способы связи и управления известны в технике. Компьютер 20 программируется для обработки сигналов, принимаемых от датчиков 31 и 18 и для выработки соответствующих ответных сигналов для возбуждения двигателей 25 и 17, установленных на револьверном узле.
В револьверном узле 10 центральный вал 11 револьверной головки предназначен для вращения револьверной плиты 13. Вал 11 револьверной головки приводится во вращение двигателем 25. Ведущий вал 26 выходит из двигателя 25 и используется для приведения во вращение вала 11 револьверной головки. Часть этикетировочного устройства, содержащая двигатель 25, зубчатое колесо 27 двигателя и зубчатое колесо 28 револьверной головки, а также относящиеся к ним компоненты размещены в корпусе 60 ведущего двигателя. Эта часть отделена перегородкой 61 от револьверной плиты 13 и позиций 24 манипулирования контейнерами.
В корпусе 60 ведущего двигателя расположен также датчик 31 вала револьверной головки. При вращении вала 11 револьверной головке его движение передается от зубчатого колеса 28 револьверной головки к зубчатому колесу 29 датчика. Это движение воспринимается датчиком 31. Датчик 31 в ответ на воспринятое перемещение и положение вала 30 генерирует множество электрических сигналов, соответствующих направлению, скорости и угловому положению вала 11 револьверной головки. Некоторые датчики генерируют электрические сигналы, представляющие собой импульсы, которые могут кодироваться для представления информации о направлении, скорости и угловом положении вала. Этот сигнал передается по линиям 22 и 21 управления к компьютеру 20.
Револьверная плита 13 установлена соосно валу 11 револьверной головки. С револьверной плитой 13 связаны несколько позиций 24 манипулирования контейнерами. Каждая из этих позиций 24 содержит двигатель 17, вращающийся вал 16, датчик 18 и плоскость (или планшайбу) 14 для установки контейнера. Двигатели 17 установлены на донной части револьверной плиты 13 с помощью хорошо известных из уровня техники средств. Вращающийся вал 16 выходит из двигателя 17 через отверстие для вала в револьверной плите 13. Датчик 18 соединен с основанием вращающегося вала 16 (через воспринимающий соединительный элемент 19) для отслеживания скорости, углового положения и направления вращения вращающегося вала 16, а тем самым и расположенного на нем контейнера 15.
В предпочтительном варианте выполнения датчик 18 является вращающимся оптическим шифратором. Можно также использовать датчики, воспринимающие магнитный поток, однако они не дают такой точности, как оптические приборы. Кроме того, некоторые типы двигателей имеют в своем составе интегральный шифратор положения, так что один блок может обеспечивать функции двигателя и датчика. Оптический шифратор 18 считывает положение вращающегося вала 16 на множестве шагов, равномерно распределенных по полному обороту в 360o вращающегося вала 16. Например, можно использовать оптический шифратор с 500 угловыми шагами, равномерно распределенными по полному 360o-ному обороту вала. Чем больше число шагов, тем выше точность, с которой могут восприниматься скорость, направление и угловое положение.
На верхней части револьверной плиты 13 вокруг приводного вала 11 расположена станция 23 передачи электрических сигналов. Эта станция 23 обеспечивает непрерывную передачу электрических сигналов между линиями, идущими от компьютера 20 к вращающимся позициям 24 и обратно. Способом и аппаратура для формирования станция 23 передачи электрических сигналов хорошо известны в технике.
Датчик 18 выдает на компьютер 20 точную информацию об угловом положении контейнера 15 в любой данный момент времени. Положение и угловая ориентация определяются относительно фиксированной точки угловой ориентации вала, которая заранее отградуирована на датчике 18 положения, как описано выше. Получая точную информацию об угловом положении контейнера, компьютер 20 может посылать соответствующие сигналы на двигатель 17, чтобы придать планшайбе 14 требуемое перемещение. Эти двигатели 17 могут быть двигателями переменного или постоянного тока в зависимости от рабочих условий и других особенностей, которые необходимо принимать во внимание. Можно также использовать и шаговые двигатели. Электрические двигатели 17 вращают планшайбы 14 (и контейнеры 15 на них) с определенной скоростью в определенном направлении и в течение определенного времени на основе сигнала возбуждения или управляющего сигнала, подаваемого на двигатель 17 компьютером 20. Соответствующий двигатель для этого варианта выполнения выбирается на основе характеристик планшайбы 14 и контейнера 15 и, в частности, на основе требуемой выходной мощности, скоростных характеристик, требований крутящего момента и рабочих условий.
Компьютер 20 в предпочтительном варианте выполнения позволяет оператору легко изменять параметры этикетирования в противоположность кропотливому медленному процессу модифицирования механического этикетировочного устройства, известного из уровня техники.
Универсальный компьютер типа IBM-совместимого компьютера с достаточной скоростью обработки может быть дополнен соответствующими интерфейсами для восприятия информации и управления этикетировочным устройством. Способы управления известны в технике и приведенных в стандартной справочной литературе, например в книге Incremental Motor Control, том 1, DC Motors and Control Systems, изданной Benjamin C. Kuo и Jacob Tal, опубликованный издательством SRL Publishing Co.
На фиг. 5 представлены компоненты, которые образуют часть управляемой компьютером системы. Эти компоненты обозначены теми же самыми ссылочными позициями, что и на фиг. 1. Особый интерес представляют двигатель 25 револьверной головки, датчик 31 револьверной головки, группа двигателей 17 планшайб, датчик 18 планшайб, двигателя 210 вакуумных барабанов и датчики 211 вакуумных барабанов.
На каждый двигатель 25, 17, 210 в соответствующем случае подается управляющий сигнал, содержащий задаваемую угловую скорость Ω и задаваемое угловое положение Θ. Каждый датчик 31, 18, 211 выдает соответствующий сигнал, содержащий информацию об измеренной угловой скорости ω и измеренном угловом положении θ. Управляющие сигналы и сигналы измерений выдаются и принимаются в зависимости от характеристик конкретных приборов. Задаваемые и измеренные угловые скорости включают как величину (скорость), так и направление.
На фиг. 6 представлена упрощенная структурная схема аппаратных средств, включая компьютер, интерфейсы, исполнительные органы и датчики, согласно предпочтительному варианту выполнения. Представлены не все аспекты цифрового компьютера, общая структура которого хорошо известна в технике.
Информация в виде электрических сигналов вводится во входной интерфейс 101 компьютера 20. Интерфейс 101 содержит аппаратуру согласования сигналов, и его работа управляется программным алгоритмом управления обработкой и компьютерной операционной системой. Если датчики 18 и 31 вырабатывают аналоговые сигналы и используется цифровой компьютер, то интерфейс может содержать схему аналого-цифрового преобразования. На интерфейс могут приниматься также сигналы от других датчиков, указывающих состояния других компонентов этикетировочного устройства. Например, состояния других компонентов этикетировочного устройства могут подаваться на интерфейс с использованием соответствующих датчиков. Например, на интерфейс может подаваться информация о положении верхней планшайбы (не показано), о состоянии вакуумного барабана, включая скорость и угловую ориентацию, и о состоянии блока подачи этикеток. В интерфейсе 101 входные сигналы могут фильтроваться для подавления шума, обрабатываться для идентификации исходного датчика, а сами данные могут подвергаться проверке на достоверность в отношении заданных характеристик для установления того, что они находятся в требуемом диапазоне и явно не ошибочны.
Входной интерфейс 101 может быть параллельным интерфейсом, в котором несколько сигнальных каналов обрабатываются практически одновременно, либо он может быть последовательным интерфейсом, в котором сигналы принимаются и обрабатываются последовательно. Способы взаимодействия приборов, включая датчики, с компьютерами хорошо известны в технике.
После того, как интерфейс 101 примет входные сигналы от датчиков и выполнит их начальную обработку, интерфейс подает в компьютер 20 информацию о состоянии этикетировочного устройства, используемую на последующих стадиях обработки. Если компьютер 20 представляет собой цифровой компьютер, то информация о состоянии в общем случае подается в виде группы слов состояния, закодированных в виде двоичных разрядов. Можно также использовать управление от аналогового компьютера, причем в этом случае информация о состоянии может представлять собой группу уровней напряжения на различных управляющих шинах.
Информация о состоянии считывается блоком 102 вычислительной обработки, который выполняет логические и арифметические операции на основе информации о состоянии, запомненных параметров из запоминающего устройства 104 и операторских вводов с клавиатуры 103, когда это необходимо или желательно. Стадии или алгоритм логической и/или арифметической обработки могут вводиться оператором с клавиатуры 103 либо вызываться из запоминающего устройством 104, такого как компьютерная память и/или компьютерное дисковое устройство. Соответствующий алгоритм обработки определяет характеристики группы управляющих сигналов на основе нескольких системных параметров, включая геометрию плиты 13 револьверной головки и планшайб 14, воспринимаемое положение, направление вращения и скорость плиты 13 револьверной головки и планшайб 14, математическое описание соответствующего контейнера 15 на заданной планшайбе 14, размеры каждой накладываемой этикетки, положение относительно контейнера 15, в котором должна накладываться этикетка, описание движения контейнера для обеспечения требуемого этикетирования и другие необходимые параметры, относящиеся к характеристикам всего устройства.
В алгоритме обработки используется эта информация и определенная операция для вычисления соответствующих управляющих сигналов на различные двигатели 17 и 25 и другие узлы, такие как вакуумный барабан, для выполнения требуемой операции. Логический и арифметический процессор проверяет также достоверность вычисленных параметров управляющих сигналов для установления того, что они явно не ошибочны, на основании текущего состояния устройства, физических возможностей узлов, включая двигатели 17 и 25, и требуемой операции. Условия, вызывающие недоверие, указываются как ошибочные условия. В общем случае могут выполняться некоторые вычисления, а результаты предварительно запоминаться, так что в процессе работы этикетировочной машины необходимо будет выполнять лишь минимальное число вычислений.
Управляющие характеристики задаются группой выходных состояний или управляющих слов, генерируемых под управлением программного обеспечения в вычислительном процессоре 102, и подаются на группу выходных интерфейсов 105. В большинстве случаев достаточно единственного выходного интерфейса 105, в иных случаях может быть целесообразно предусмотреть более одного интерфейса, таких как отдельные интерфейсы для управления двигателем 25 револьверной головки и двигателями 17 планшайб.
Выходной интерфейс 105 может непосредственно генерировать соответствующий аналоговый или цифровой (импульсный) сигнал на основе информации, выданной процессором 102, для возбуждения двигателей 17 и 25, чтобы вызвать требуемое перемещение. В частности, задаваемые скорость, направление и положение рассчитываются для каждого двигателя 17 и 25. Выходной интерфейс 105 может содержать группу цифроаналоговых преобразователей для перевода цифровых управляющих сигналов в аналоговые электрические сигналы, пригодные для двигателей 17 и 25. Выходной интерфейс 105 может также содержать усилительные ступени. В других случаях может быть необходимым расположить между интерфейсом 105 и двигателем 17 и/или 25 выходной возбудитель 106. Дополнительный выходной возбудитель требуется лишь тогда, когда требуемый сигнал возбуждения двигателя имеет большее напряжение или ток, чем те, которые можно желательно подавать непосредственно с выходного интерфейса 105, или если управляющий сигнал более эффективно может генерироваться вне компьютера или его интерфейса. Например, выходной возбудитель 106 может быть усилителем либо генератором, управляемым напряжением, который генерирует импульсный сигнал переменной частоты для шагового двигателя. В общем случае выходные сигналы на двигатели являются аналоговыми сигналами с током менее нескольких ампер и напряжением менее 10 В; однако в объем настоящего изобретения включено также использование двигателей, для которых требуются сигналы с более высокими напряжениями или токами.
Согласно одному варианту выполнения изобретения в качестве двигателей 17 и 25 используют двигатели постоянного тока. В этом варианте выполнения выходной интерфейс 105 или необязательный выходной возбудитель 106 обеспечивает подачу аналогового сигнала выбираемого усиленного постоянного напряжения с нулевой частотой на каждый двигатель постоянного тока.
Согласно альтернативному варианту выполнения в качестве двигателей 17 и 25 используют двигателя переменного тока. В этом случае для возбуждения или управления каждым двигателем 17 и 25 используется переменный (с ненулевой частотой) сигнал тока или напряжения.
Согласно другому варианту выполнения изобретения в качестве двигателей 17 и 25 используют шаговые двигатели. Используемые для управления двигателями сигналы являются импульсами, причем каждый импульс соответствует частичному повороту вала двигателя. Изменения в скорости двигателя могут достигаться за счет увеличения или снижения частоты импульсов. Характеристики ускорения двигателя могут изменяться путем линейного изменения частоты импульсов в соответствии с требуемой характеристикой линейного ускорения.
Согласно одному варианту выполнения изобретения можно сочетать различные типы двигателей, поскольку управляющая процессом программа и интерфейсы конфигурируются соответствующим образом.
При движении револьверной плиты 13 и планшайб 14 в ответ на управляющие сигналы на входном интерфейсном блоке 101 принимаются новые сигналы с датчиком 18 и 31, начиная процесс заново. Система дискретизируется достаточно часто для поддержания управления работой. Требуемая частота дискретизации является функцией динамики системы, включающей скорости револьверной головки и двигателей планшайб.
Этикетировочное устройство совместимо с различными типами двигателей, однако согласно предпочтительному варианту выполнения используют шаговые двигатели. Применение шаговых двигателей для рассматриваемого устройства особенно целесообразно, поскольку изменение угловой скорости и углового положения происходит непосредственно в ответ на входные команды. Шаговый двигатель может быть выполнен таким образом, чтобы осуществлять перемещение из известного углового положения в задаваемое угловое положение посредством единственной команды, такой как последовательность импульсов. Скорость можно также задавать аналогичным образом. Шаговые двигатели могут также удерживаться в требуемом угловом положении путем выдачи соответствующих команд без использования дополнительных элементов, останавливающих вал двигателя, и без вибрации, которая может происходить в сервосистемах с управляемой обратной связью без шаговых двигателей.
Шаговый двигатель является одним из узлов системы с шаговым двигателем. Управляющая система с шаговым двигателем, которая возбуждает требуемую обмотку или обмотки в двигателе для запуска или остановки соответствующим образом ротора двигателя, имеет важное значение для его работы. Требуемая работа двигателя достигается путем последовательной запитки выбранных статорных обмоток, что вызывает соответствующее движение (или выравнивание) ротора. Управляемое ускорение и замедление шагового двигателя достигается путем пилообразного или линейного изменения скорости сначала с медленной частотой повторения шагов, а затем со все более высокими частотами повторения шагов. При замедлении шагового двигателя высокая частота повторения шагов постепенно снижается. В некоторых шаговых двигателях один импульс вынуждает двигатель смещаться на дробную часть полного оборота. В шаговых двигателях с 500 шагов на 360o вал двигателя вращается со скоростью 360/500=0,72 градус/шаг. Скорость такого шагового двигателя управляется частотой повторения импульсов или шагов. Это линейное изменение снижает колебания и потенциальные потери синхронизации, которые могут появиться в результате внезапных изменений в частоте повторения импульсов. Двигатель и методы управления двигателями хорошо известны в механике.
На фиг. 7 представлена управляющая система на примере варианта выполнения этикетировочного устройства револьверного типа с двумя позициями этикетирования, аналогичного изображенному на фиг. 3 и 5. На блок-схеме алгоритма на фиг. 7 представлены три первичных фазы работы. Во время фазы начальной синхронизации управляющая система дает команду нескольким двигателям на работу на номинальных значениях скорости или вблизи этих значений и на установку их валов в некотором номинальном наборе угловых ориентаций. Хотя стадия первоначальной синхронизации может и не быть необходимой для работы этикетировочного устройства, ее включение по существу исключает возможность того, что характеристики какого-либо узла, такие как ориентация вала двигателя, будут неверными и не поддающимися корректировке в доступное время в фазе собственно этикетирования. На фазу начальной синхронизации отводится достаточное время, чтобы практически гарантировать синхронизацию, исключая неисправность узлов.
Во время начальной синхронизации происходит считывание или дискретизация данных со всех датчиков 18, 31, 211 через входной интерфейс 101. Затем их значения сравниваются с некоторыми стандартными или номинальными параметрами, и на шаговые двигатели через выходной интерфейс 105 и выходной возбудитель 106 посылаются соответствующие команды в виде числа и частоты импульсов. Выходной возбудитель 106 может содержать контроллер шагового двигателя и работать, преобразуя команды от компьютера 20 в эквивалентные последовательности импульсов.
После начальной синхронизации имеется три возможных фазы, в которых может быть задействован контейнер 15, установленный на планшайбе 14. Как показано на фиг. 3, контейнер в положении 1 достигает барабана 35F позиции фронтального этикетирования. Следует иметь в виду, что положения контейнера являются частью непрерывного движения контейнеров вокруг револьверной головки. Двигатель 17 планшайбы и двигатель 211 вакуумного барабана должны войти в эту фазу заблаговременного до момента касания, так чтобы требуемые угловая скорость и ориентация достигалась для всех предусматриваемых после синхронизации начальных состояний. Желательно согласовывать угловые скорости, чтобы минимизировать относительное проскальзывание, возможное повреждение элементов узлов и этикетки. Желательно согласовывать угловую ориентацию планшайбы 14 вместе с ориентируемым ею контейнером 15 с вакуумным барабаном 35F так, чтобы этикетка должным образом располагалась на поверхности контейнера 15. Для системы с единственной этикетировочной позицией, такой как на фиг. 2, ориентация контейнера может не иметь значения, если контейнер симметричен относительно оси вращения.
Для контейнера в положении 2, на который накладывается этикета 36F, согласование его скорости поддерживается до тех пор, пока задняя кромка этикетки не отойдет от вакуумного барабана. В это время может начаться фаза обертывания этикетки. Фаза обертывания включает ускорение двигателя 17 планшайбы до требуемой скорости обертывания. Когда эта скорость достигнута, что определяется датчиком 18 планшайбы, скорость обертывания поддерживается в течение фиксированного числа оборотов или, что эквивалентно, в течение фиксированного периода времени. Источник давления, такой как валик 202 или прямой приглаживающий рычаг либо направленный поток сжатого воздуха, взаимодействует с вращающимся контейнером и неприкрепленной задней кромкой этикетки для прижатия его к поверхности контейнера. При касании этикетка прикрепляется с помощью предварительно нанесенного клея. Число оборотов R, необходимых для выполнения высокоскоростного обертывания, задано заранее и является частью управляющей программы. Одного полного оборота достаточно, когда используют прижимной блок; большее число оборотов может быть необходимо при обертывании этикетки при отсутствии прижимного блока, когда обертывание достигается вращением с высокой скоростью.
Операции с контейнером после обертывания зависят от того, для какой этикетки выполнена операция обертывания. Если выполнена операция обертывания второй этикеткой, например, когда была наклеена тыльная этикетка 36b, двигателю 17 планшайбы может быть дана команда на замедление для подготовки к удалению контейнера 15 из револьверной головки. Если контейнер находится в положении 4 на фиг. 3, то его необходимо подготовить к операции наклейки второй этикетки. Как описано выше, для этого требуется координация угловых скоростей и ориентаций для выполнения этикетирования по существу без проскальзывания и для правильного размещения этикетки.
В иные нежели фаза приема этикетки моменты времени, т.е. в фазе обертывания этикетки и в фазе замедления двигателя планшайбы, скорость и ориентация двигателя планшайбы не имеют важного значения и в общем случае ими можно управлять для поддержания номинальной угловой скорости двигателя планшайбы. В течение этой фазы относительная угловая ориентация отслеживается, но не нуждается в коррекции. Эта фаза поддержания скорости обычно имеет место до фазы приема этикетки, а также между фазами приема и обертывания этикетки. Начало и выполнение нескольких фаз задается заранее на основе характеристик контейнера 15 и рабочих характеристик револьверного устройства. Фаза должна начинаться заблаговременно до собственно операции, чтобы обеспечить возможность достижения требуемых скорости и ориентации.
В варианте выполнения настоящего изобретения, относящемся к наклейке нескольких этикеток к нецилиндрическим контейнерам, необходимое управление может быть несколько сложнее. Например, как показано на фиг. 4, можно успешно использовать несколько иной подход к управлению. Прямоугольная форма контейнера обусловливает наличие двух моментов, влияющих на управляющую систему. Во-первых, поворот контейнеров для облегчения обертывания может быть совершенно неэффективен вследствие потенциально неблагоприятных воздушных течений, образующихся при поворачивании несимметричного контейнера. Во-вторых, прямоугольной формой контейнера определяется различие в расстояние от центра револьверной головке по мере того, как контейнер поворачивается каждой поверхностью в сторону позиции этикетирования. Для этих двух отличий от устройства этикетирования цилиндрических контейнеров требуется более общий нежели для цилиндрического контейнера подход к ориентированию контейнера, но который применим также и к цилиндрическим контейнерам.
Работа системы основана на управлении угловой ориентацией каждого двигателя 17 планшайбы как функцией относительной угловой ориентации револьверной головки. В операции этикетирования, представленной на фиг. 4, в положении 1 показан прямоугольный контейнер. Этот контейнер сориентирован с помощью соответствующих команд, подаваемых на его двигатель 17 планшайбы, таким образом, чтобы получить требуемое для этикетирования положение соответствующей поверхности А контейнера относительно вакуумного барабана 40F. Хотя контейнер в положении 1 не должен поворачиваться тем же образом, как это имеет место при повороте цилиндрического контейнера, его угловой ориентацией управляют, например, путем качания (частичного вращения) контейнера к вакуумному барабану 40F в соответствующий момент для приема передней кромки 41F этикетки и отклонения от барабана в последующий момент таким образом, чтобы при приеме этикетки не задеть вакуумный барабан 40F. Контейнер можно непрерывно направлять по какой-либо траектории, чтобы счищать вакуумный барабан 40F. Необходимо отметить, что барабан в общем случае может быть и не размещен в точке наименьшего касания с контейнером и что различные вакуумные барабаны можно при необходимости разместить на разных расстояниях от револьверной головки или от средней линии траектории перемещения для облегчения этикетирования различных поверхностей контейнеров.
Возможность непрерывно направлять контейнер по заданной траектории позволяет также менять ориентацию контейнера для последующей операции этикетирования с другой стороны. Например, на фиг. 4 контейнер 2 вращается по часовой стрелке таким образом, чтобы повернуть его соответствующей стороной для этикетирования на вакуумном барабане 40B.
Управление ориентацией контейнера позволяет также использовать прижимное приспособление, такое как подпружиненный валик 240B, который представлен в положении 4, для прижатия покрытой клеем этикетки к поверхности контейнера. При прохождении контейнером прижимной позиции 240B ориентации контейнера может регулироваться таким образом, чтобы поддерживалось относительно постоянное давление. Для прижатия этикетки к поверхности контейнера могут также использоваться и другие прижимные приспособления, такие как прямой приглаживающий рычаг, щетка или поток направляющего сжатого воздуха.
Шаговые двигатели используются в качестве двигателей 17 планшайб в этом варианте выполнения в связи с тем, что для изменения ориентации шаговыми двигателями можно легко управлять шаговыми приращениями. В данном варианте выполнения для каждой угловой ориентации револьверной головки на двигатель 17 планшайбы подается команда для конкретной угловой ориентации. Оборот револьверной головки на 360o может быть разделен на зоны с различными требованиями к точности. Для каждого приращения положения револьверной головки или при необходимости для каждой зоны приращений положения револьверной головки требуемое значение угловой ориентации и скорости планшайбы запоминается в запоминающем устройстве. Эта последовательность положений или команд для достижения этих положений хранится в памяти и в соответствующее время извлекается из памяти и подается на двигатель 17 планшайбы. При необходимости для минимизации вычислений в замкнутых системах управления можно использовать какие-либо схемы прогнозирования и коррекции. Способы реализации систем управления с прогнозированием/коррекцией известны в технике. Для всех двигателей планшайб требуется только одна запомненная последовательность положений, поскольку все они в разное время проходят через одну и ту же последовательность команд. Датчик 31 револьверной головки используется для проверки положения револьверной головки в любое время; и могут также выполняться соответствующие коррекции. Данные с датчиков 18 планшайб считываются для проверки того, что заданные командами ориентации достигнуты. В отношении фазы синхронизации и фазы приема этикетки управления вакуумным барабаном по существу такое же, что и для этикетировочного устройства для цилиндрических контейнеров по фиг. 3 и 7. Синхронизм затем поддерживается практически непрерывно, а фаза обертывания этикетки включена в управление двигателем планшайбы как функция угловой ориентации револьверной головки.
Приведенное выше описание конкретных вариантов выполнения настоящего изобретения представлено для иллюстративных и описательных целей. Его не следует рассматривать как ограничивающее объем изобретения только рассмотренными примерами выполнения и очевидно, что на основе вышесказанного в него можно внести множество изменений и модификаций. Представленные варианты выполнения выбраны и описаны для более наглядного пояснения принципов изобретения и его практического осуществления, благодаря чему специалист может лучше использовать изобретение и различные варианты выполнения с различными модификациям, которые пригодны для рассмотренного выше конкретного применения. Подразумевается, что объем изобретения определяется приложенной формулой изобретения и ее эквивалентами.
Реферат
Управляемое компьютером этакетировочное устройство имеет револьверную головку с двигателем для приведения ее в движение и датчик для выдачи информации о состоянии револьверной головки на управляющий компьютер. Устройство револьверного типа содержит по меньшей мере одну позицию этикетирования. Каждая позиция этикетирования также имеет двигатель и датчик, причем двигатель приводит позицию этикетирования в движение, а датчик выдает информацию о состоянии позиции этикетирования на управляющий компьютер. Компьютер программируется для обработки информации о состоянии совместно с заранее запомненной информацией, относящейся к характеристикам этикетировочного устройства, контейнеров и требуемого процесса этикетирования, и вырабатывает соответствующие управляющие сигналы для работы этикетировочного устройства. Компьютер соединен с двигателем и датчиком револьверной головки и с двигателем и датчиком каждой позиции этикетирования для обработки информации о состоянии, принятой от датчика револьверной головки и датчика каждой позиции этикетирования, и для выработки на основании принятой и обработанной информации управляющих сигналов для возбуждения двигателя револьверной головки и двигателя каждой позиции этикетирования для осуществления этикетирования контейнеров, Это позволяет повысить качество этикетирования, в том числе контейнеров, имеющих некруглое сечение. 4 с. и 14 з.п. ф-лы, 8 ил.

Комментарии